燃料电池供气系统的自适应滑模控制
2023-12-18 09:45:28王新立潘凤文陈文淼
控制理论与应用 2023年11期
秦 彪 ,王新立†,王 雷 ,潘凤文 ,陈文淼 ,贾 磊
(1.山东大学控制科学与工程学院,山东济南 250010;2.潍柴动力股份有限公司,山东潍坊 261041)
1 引言
质子交换膜燃料电池(proton exchange membrane fuel cell,PEMFC)具有能量利用率高、低温启动、无污染的优点,被视为极具发展潜力的化石燃料替代能源,已广泛应用在航空航天、汽车等领域[1–2].PEMFC运行时需要调节供气子系统使氢气、氧气过量供应,避免氢、氧饥饿导致的电池寿命衰减,同时循环未反应的氢气,依靠循环氢气排出反应生成的水,避免水淹现象,并提高氢气利用率[3].然而,PEMFC供气系统是一种多变量、非线性、强耦合的复杂系统,需要先进控制技术来保证PEMFC的高效持久运行[4].目前,国内外许多研究机构和学者都针对燃料电池供气子系统控制进行了大量的研究[5–6],例如基于滑模控制、模型预测控制(model predictive control,MPC)的氧气过量比控制等[7–9].但这些控制方法需要压力、流量传感数据,测量精度将影响控制精度[6].为了解决上述问题,文献[4]提出了一种基于高阶滑模观测器的氧气过量比控制算法,利用观测器估计系统难以测量的状态变量,进而有效减少系统不确定性和外部未知扰动的影响[10–11].在此基础上,文献[6]提出了一种模糊前馈+滑模控制算法来调节氧气过量比,具有响应速度快、鲁棒性好的优点.当燃料电池负荷发生变化时,需调节空压机控制氧气过量比,阴极压力会随之波动,阴阳两极压差不可避免会发生变化,进而影响电池的寿命,甚至损坏燃料电池的质子交换膜.因此,需要调节氢气供给与循环子系统来控制阴阳两极压力平衡以保证电池稳定、长寿命运行[12].文献[13]提出一种前馈+PID(proportional integral derivative)的控制策略来控制供给氢气压力,能够有效解决压力迟滞带来的控制难题,避免损害质子交换膜,延长电堆的寿命.文献[14]提出一种燃料电池线性化模型,并利用一阶滑模控制算法来实现PEMFC阴、阳极压力的定值控制.此外,文献[15]提出了一种针对燃料电池非线性模型的二阶滑模控制算法来控制燃料电池系统阴、阳极压力,与文献[14]相比,该方法具有较快的响应速度和更好的鲁棒性.上述研究仅仅实现燃料电池系统阴、阳极压力控制,但并未考虑氢气和氧气的过量比控制,难以同时实现燃料电池气体供给、循环和压力平衡的协同控制.此外,滑模控制作为一种先进控制算法,已经在燃料电池系统控制中发挥了重要作用[16–17].然而,由于切换函数的作用,状态轨迹在趋近平衡点时往往在滑动模态面附近抖振,影响执行机构寿命和控制效果.自抗扰滑模控制[18]、抗饱和滑模控制[19]、自适应滑模控制[20]都是常见的抑制抖振方法.本文针对PEMFC供气系统阴阳极协同控制问题,同时考虑氢、氧过量比及阴阳极压力平衡控制,提出了一种自适应超螺旋(adaptive super-twisting,ASTW)滑模控制器,以氢、氧过量比及阴阳极压差为被控变量,保证氢、氧供给的同时,控制质子交换膜两侧压差在可允许的范围,提升燃料电池使用寿命,并通过李雅普诺夫方法证明该算法的稳定性.最后在MATLAB/Simulink 环境下开展仿真研究,与传统滑模控制算法以及PID算法进行了比较.仿真结果表明,本文提出的ASTW滑模控制算法具有较快的响应时间,且通过自动调节控制增益大小,可有效的抑制抖振现象.
2 燃料电池模型
PEMFC系统由供氧子系统、供氢子系统和电堆组成,如图1所示.
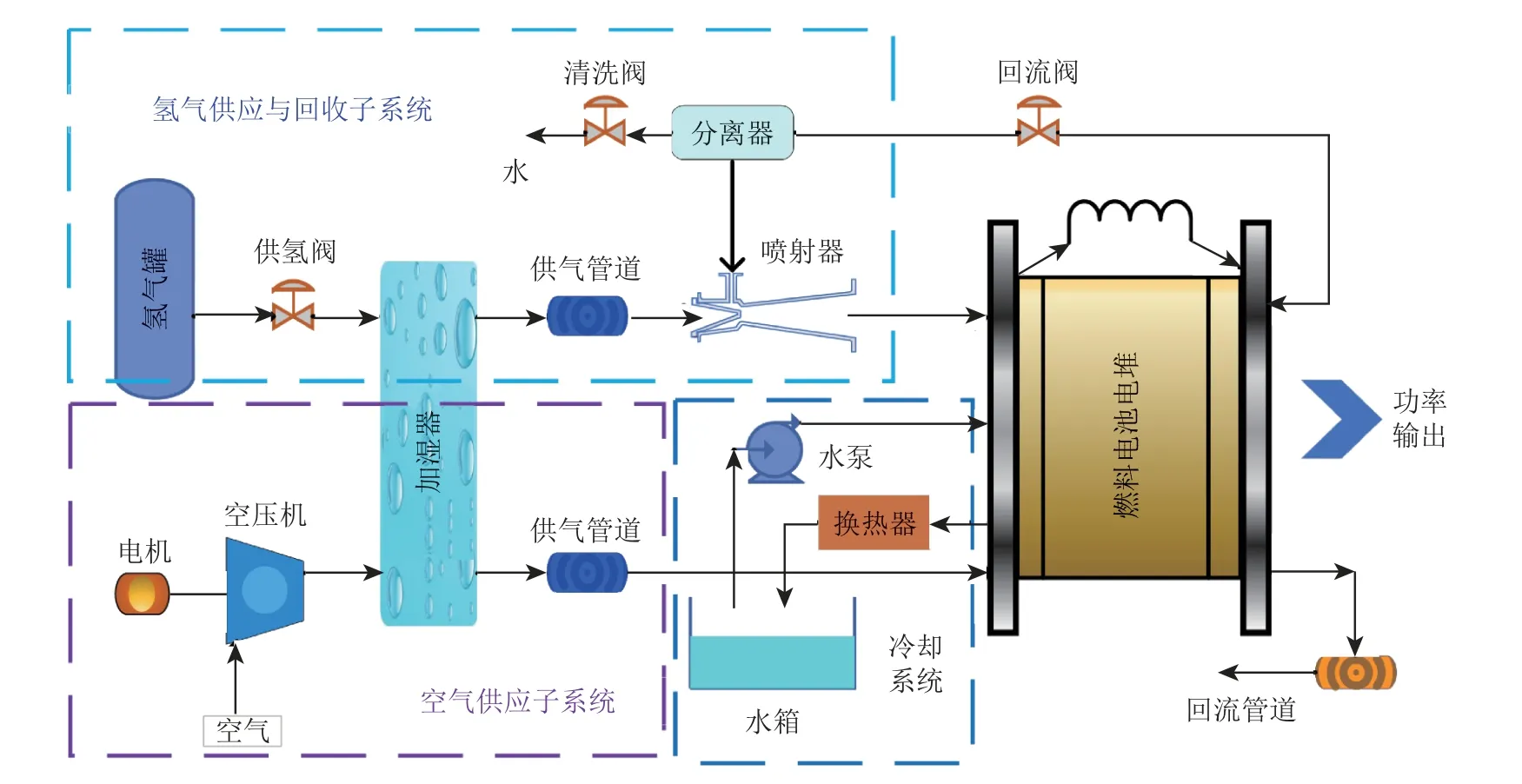
图1 系统框图Fig.1 The diagram of PEM fuel cell system
高压氢气罐的氢气经供氢阀后进入喷射器,与喷射器引射电堆出口处未反应的过量氢气混合后一同进入电堆阳极;空气由空压机增压后充入电堆阴极;电堆内氢气在催化电极作用下分解为电子和质子,质子穿过质子交换膜进入阴极,电子经外电路负载做功.阴极侧氧气则与外电路电子和阳极传来的质子发生电化学反应生成水.本节建立了包含电堆、喷射器、空压机、供气回流管道和阀门的燃料电池模型,便于后续算法设计.
2.1 电堆模型
根据电化学原理,燃料电池的输出电压具体方程如下:
式中:Enerst为能斯特电压;Eact,Eohm,Econ分别为粒子活化、欧姆、浓度活化造成的电压损失.能斯特电压可以表示为
其中:pH2,pO2,Tbody分别为氢气分压、氧气分压和燃料电池电堆温度.此外,各电压损失可以表示为
其中:ξi(i=1,2,3,4),Rohm,B,CO2,I,i和imax分别为待辨识参数、欧姆电阻、活化浓度压损经验系数、氧气摩尔浓度、电堆电流、电流密度和最大电流密度.
2.2 阴阳极压力模型
基于质量守恒定律,燃料电池阴极氧气、氮气和水蒸气压力动态模型如下式所示:
2.3 喷射器模型
PEMFC氢气循环可以将阳极内反应生成的水排出,避免水淹现象,同时提高氢气利用率.氢循环主要有循环泵和喷射器两种方法.与循环泵相比,喷射器氢循环方法具有无噪音、无污染、无功耗等优点.喷射器结构如图2所示,来自高压氢气罐的氢气传入喷射器一次流入口,在吸收区经喷嘴加速后引射二次流入口处的未反应氢气,两股流体在混合区混合后进入电堆.喷射器引射比是二次流流量与一次流流量之比,该值在氢气过量比控制起着重要作用.
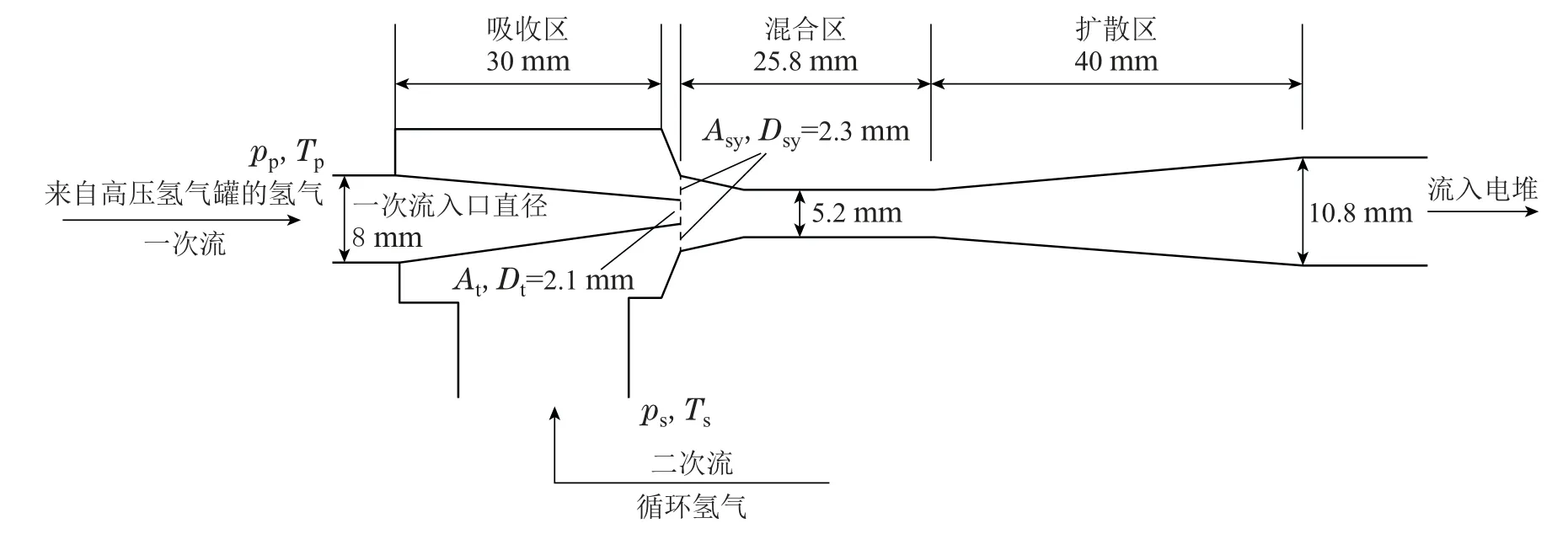
图2 喷射器几何结构Fig.2 The geometry structure of ejector
根据流体力学机理,结合喷射器的几何结构参数,喷射器的一次流与二次流的流量可以表示为
其中:pp和ps为一次流压力和二次流压力;At和Asy是喷射器喉嘴面积和二次流的有效面积;Tp和Ts分别为一次流温度和二次流温度;γ1是氢气的比热容比;ηp和ηs为等熵效率.同样,流入阳极的氢气可以表示为
2.4 空压机模型
空压机转速的动态特性可以描述为
其中:τcm和τcp分别为输入转矩和需求转矩;kv,kt和Rcm是空压机的相关参数;Tatm,Cp,psm,patm,mcp,ηcp和γ2分别为环境温度、空气比热容、供气管道压力、环境压力、空气流量、空压机效率和空气比热容比.空压机空气流量方程如下所示:
2.5 供气管道模型
根据理想气体状态方程和能量守恒定律,阴极供气管道压力可以描述为
其中:R,Vsm,ca,Ma和Tsm,ca分别代表理想气体常数、阴极供气管道体积、空气摩尔质量和阴极供气管道温度.同样可以得到阳极供气管道压力表达式
其中:Vsm,an是阳极供气管道体积;ufv和ufv,max分别为阳极供氢阀开度和阀门最大流量.
2.6 回流管道模型
类似于供气管道模型,阴极回流管道压力模型可以描述为
其中Vrm,ca和Trm,ca分别为阴极回流管道体积和回流管道温度.阳极回流管道模型如下所示:
综上,所建立的非线性燃料电池系统模型可以被描述为
3 控制器设计
3.1 问题描述
本文提出的燃料电池供气系统阴阳极协同控制问题,是控制氢气、氧气过量比的同时实现阴、阳极压力平衡控制.燃料电池系统氧气过量比设定值与负载状况密切相关,是影响系统性能的一个重要指标.氧气过量比定义为
氧气过量比需控制在最优值,以避免氧饥饿现象,保证电池功率输出.电堆净输出功率为系统输出功率与空压机消耗功率之差,可表示为
其中:Pnet,Pfc和Pcp分别为净输出功率、系统总输出功率和空压机所消耗的功率.根据文献[21],燃料电池输出功率和空压机消耗功率可表示为
通常燃料电池采用固定氧气过量比控制(λO2=2),也有相关研究指出不同输出功率下燃料电池的最优氧气过量不同,文献[22]给出不同负载情况下对应的最优氧气过量比.因此,本文第1个控制目标为PEMFC氧气过量比控制,选取的第1个滑动变量为
与阴极侧相同,阳极氢气同样需要过量供应,以避免氢饥饿和水淹现象.类似于氧气过量比,氢气过量比可以表示为
其中mH2,in和mH2,react分别为流入阳极的氢气和反应消耗的氢气.根据文献[23],氢气过量比一般控制在1.5.因此,第2个滑动变量表示为
但通过空压机和喷射器调节氧气、氢气过量比会导致压力波动,势必引起阴、阳两极压差.当压差较大会损坏质子交换膜,阴阳两极压力平衡控制十分重要.因此,另一个滑动变量为阴、阳极压力之差
系统控制框图如图3所示.
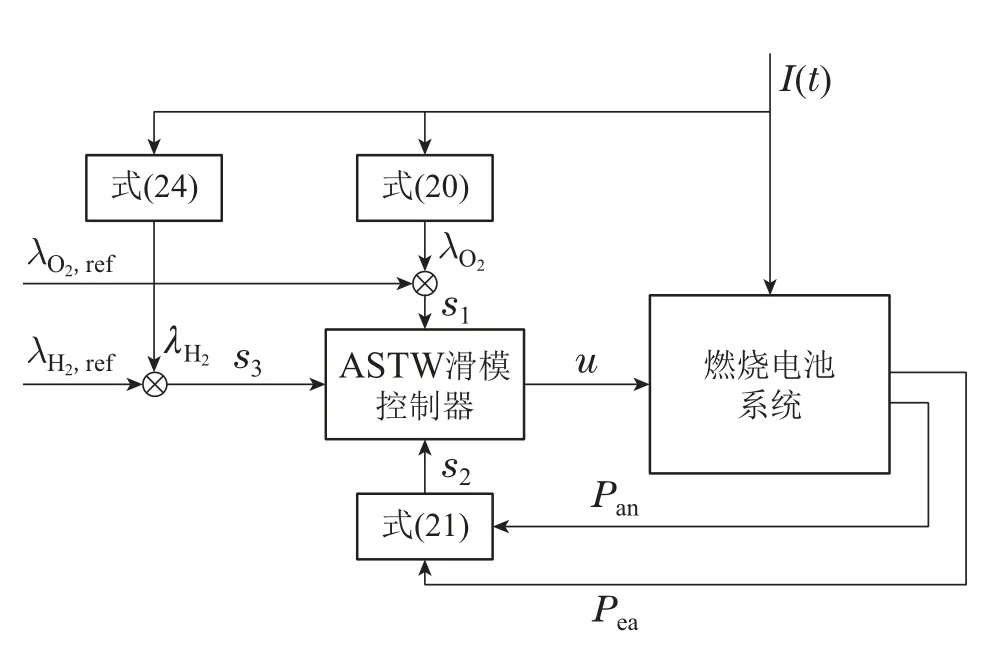
图3 ASTW滑模控制器框图Fig.3 Diagram of the proposed ASTM sliding mode controller
3.2 滑模控制器设计
第2章所建立的燃料电池系统模型具有较强的非线性特性,传统控制方法难以达到满意的控制效果.高阶滑模控制算法通过控制系统状态收敛至所设计的切换超平面,从而实现滑模变量的调节,因善于处理系统非线性特性而得到了广泛关注.本文基于建立的非线性燃料电池系统模型,设计了一种基于ASTW算法的高阶滑模控制器,即
其中:x和u分别为系统状态向量和控制输出;f(t,x)为系统状态方程;s(t,x)代表着滑动变量,式(27)所代表的系统动态特性可以描述为
式(28)可以简写为
其中χ(t,x)和φ(t,x)是有界不确定性的函数.假设存在常数参数Km,KM和C满足如下方程:
则滑模控制变量依然是有界的,可以得出
因此,基于超螺旋算法的滑模控制律表示为
其中:ς和ξ为控制增益;sgn函数为符号函数.该算法的控制律能有效控制滑模变量收敛,但存在抖振.为了解决该问题,本文提出了一种ASTW 滑模控制器,其控制增益特性表示为
3.3 稳定性分析
根据式(29)的系统滑动变量动态特性,同时,假设如下:
1) 方程φ(t,x)是未知的,并且可以表示为
其中:φ0(x,t)>0是已知函数;∆φ(t,x)是有界扰动且满足
其中:∀x∈Rn,t∈[0,∞)且边界值γ0未知.
2) 函数χ(t,x)∈R可表示为
其中有界项为
其中δ1,δ2为正数,表示未知的有限边界.最终可以得到
其中κ=φ0(t,x)u.从假设1中可以得到
考虑如下的STW滑模控制率:
其中ς和ξ变化规律如式(33)所示.
假设φ1(t,x)是未知的分段常数函数,式(38)和式(40)可以表示为
其中ω∗=χ2+φ1(t,x)u2.接下来为了便于阅读,将用χ2和φ1来代替χ2(t,x)和φ1(t,x).假设u2是有界的,且其未知边界δ3>0,
自适应增益ξ具有大于零的未知边界ξ∗,即|ξ|≤ξ∗.进而,式(42)可以表示为
为了便于稳定性分析,引入一个新的向量
进而,系统(40)可以被描述为
根据假设A2和式(44),可以得到
式(47)可以被重新表示为
为了证明系统的稳定性,引入李雅普诺夫方程,考虑λ>0,ε>0有
需要注意的是,当λ>0及ε为任意实数时,矩阵P是正定的.李雅普诺夫方函数的导数如下:
考虑到式(46)和式(48)有
考虑式(37)(48),计算对称矩阵
当满足条件
时,矩阵将是一个具有最小特征值λmin≥2ε的正定矩阵,进而≤0,证明了系统闭环稳定性.有关证明的详细信息请参考文献[20].
4 仿真研究
为了验证本文所设计的控制器性能,基于第1章所建立的PEMFC 模型,在MATLAB/Simulink 环境下搭建了75 kW的燃料电池仿真平台,参数如表1所示.此外,燃料电池温度管理系统性能良好,假设燃料电池阴、阳极和电堆具有稳定适宜的温度.通常燃料电池采用固定氧气过量比控制(=2),也有相关研究指出不同输出功率下燃料电池的最优氧气过量不同.因此,本文通过仿真研究比较了PID,STW滑模控制和ASTW滑模控制器在固定氧气过量比和最优氧气过量比跟踪控制两种应用场景下的控制效果.在仿真实验中,设置电流阶跃变化来模拟负载的变化.电流值变化如下: 0∼50 s,电流为100 A;51∼100 s,电流为160 A;101∼150 s,电流为130 A;151∼200 s,电 流为180 A.第3.1节中展示了固定氧气过量比控制时3种控制器的控制效果,第3.2节中讨论了跟踪最优氧气过量比时3种控制器的控制性能.在两种仿真情况下,PID控制器的参数(比例系数、积分系数、微分系数)分别为(20,18,0.5)和(18.5,13,0.2).
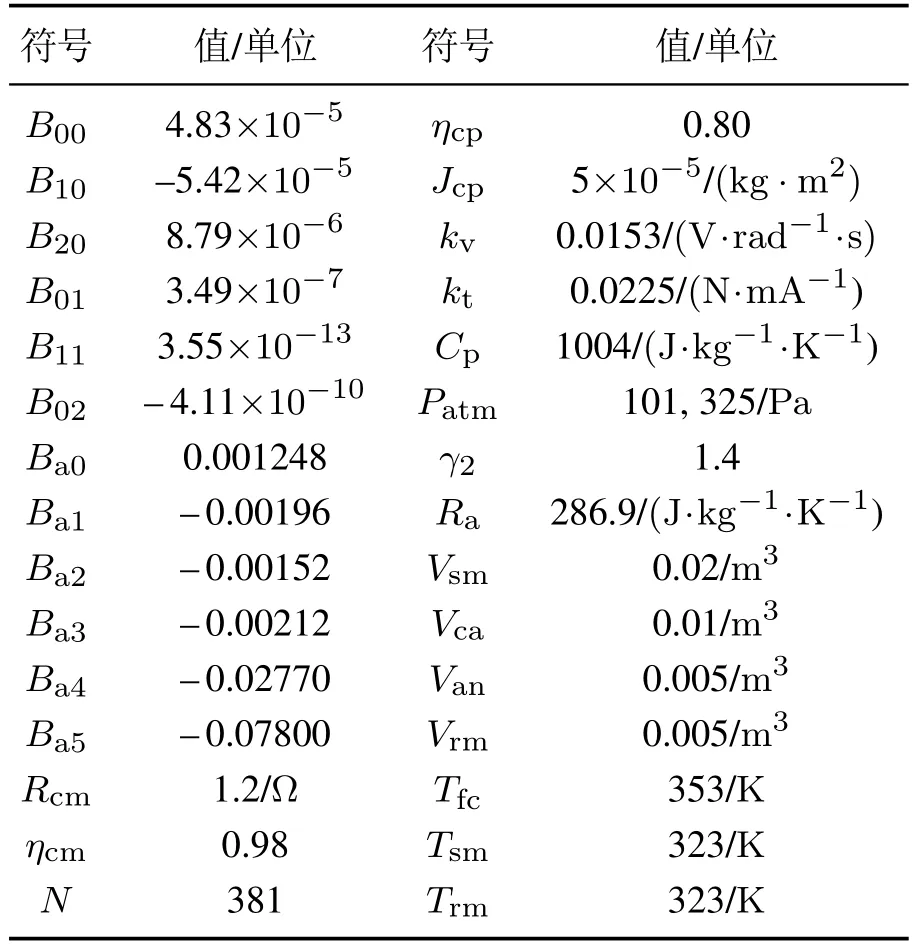
表1 75 kW PEMFC模型参数表Table 1 Parameters of 75 kW PEMFC system
4.1 固定氧气过量比控制
如上所述,常见固定氧气过量比控制是将其控制为2.3种控制算法跟踪固定氧气过量比时的控制效果如图4所示.在图4(a)中,当电流阶跃变化时,过量比由于氧气需求量的变化而产生较大的波动.但3种控制器都可以通过调节空压机电压将氧气过量比调至设定值.但与PID控制器相比,两种滑模控制器有着较快的响应速度和较小的超调量,如PID控制器大约有10%的超调和3 s的调整时间,而ASTW和STW滑模控制方法几乎没有超调量,调整时间也大大缩短,低于0.5 s.此外,从图4(b)中可以看出,传统的STW滑模控制方法的控制输出具有严重的抖振现象,而本文提出的ASTW滑模控制方法的控制输出则十分平滑,有效地抑制了抖振现象.

图4 固定氧气过量比跟踪控制仿真结果Fig.4 Simulation results of constant oxygen excess ratio control
在氧气过量比调节过程中,阴极压力会产生较大波动.此时,阳极压力需要迅速跟踪阴极压力变化以避免较大的阴、阳极压差,否则可能会损坏质子交换膜.因此,同时需要调节供氢阀与回流阀,以控制阴、阳两极压差.3种控制器对阴、阳极压力的控制效果如图5所示.
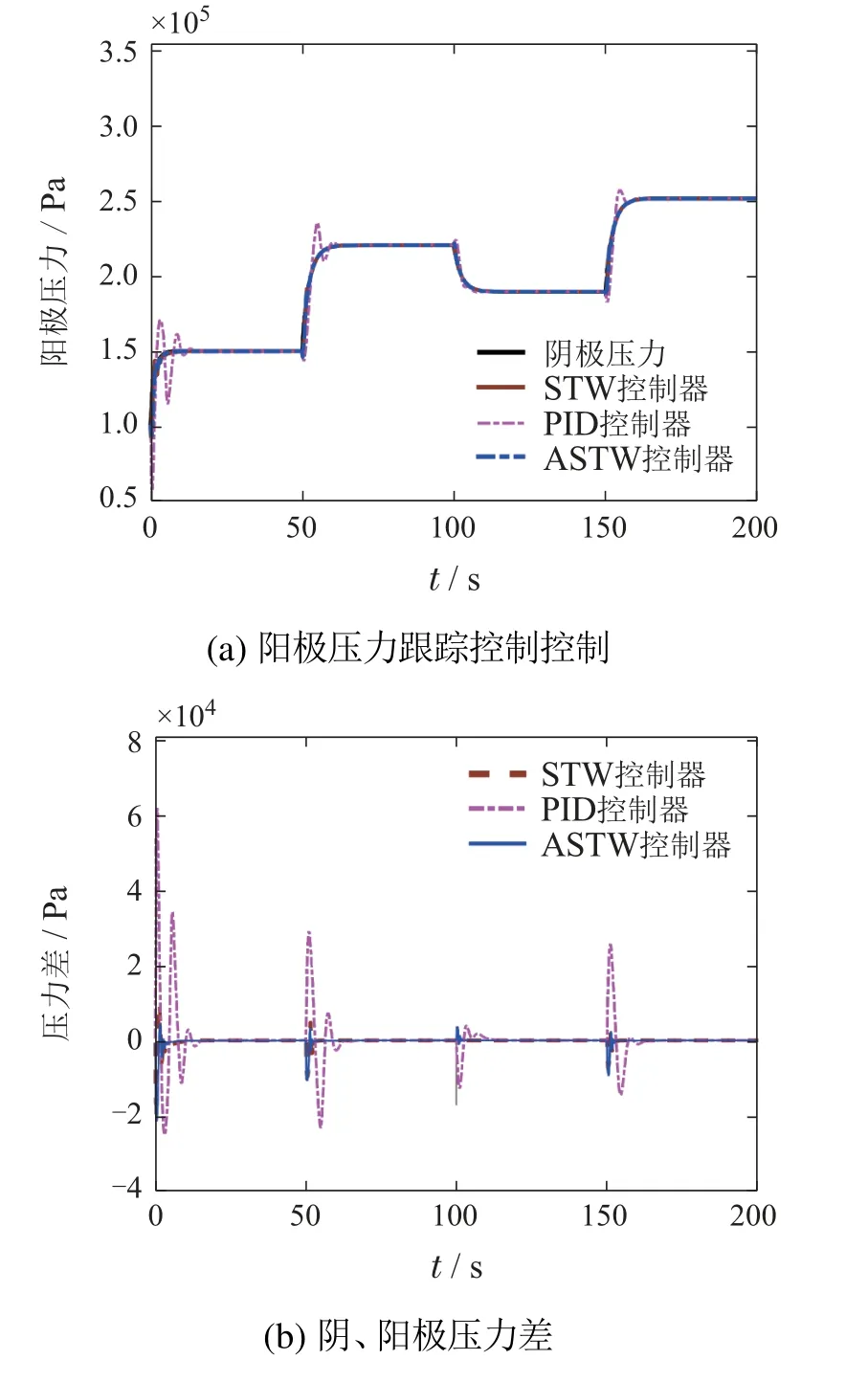
图5 阳极侧仿真结果Fig.5 Simulation results of anode side
从图5(a)–(b)中可以看出,与PID相比,两种滑模控制器具有更快的响应速度和较小的超调量.两种滑模控制算法均可将阴、阳极压力差控制在2.1×104 Pa以内,远小于PID 控制器的6.1×104 Pa.同时,图5(c)展示了供氢阀开度变化情况,STW滑模控制器输出依然存在明显抖振现象,而本文所提出的ASTW滑模控制算法则可有效的抑制抖振.此外,图5(d)描述了氢气过量比控制结果.3种控制器均可以将氢气过量比控制在设定值1.5.与PID控制器相比,两种滑模控制器依旧具有较好的控制效果.而图5(e)中回流阀开度的变化再次印证了ASTW算法的抑制抖振能力.综上,仿真结果验证了本文所提出的ASTW滑模控制器可实现燃料电池供气系统阴阳极协同控制,同时具有良好的动态性能和抖振抑制能力,利于燃料电池系统高效、稳定、持久运行.
4.2 最优氧气过量比跟踪控制
为了最大化系统输出功率,也有的研究提出不同功率负载下采用最优氧气过量比跟踪控制策略.本节仿真采用的负载变化与第3.1节相同,根据燃料电池电流可得到相应的最优氧气过量比的值[22].最优氧气过量比、氢气过量比以及阴阳极压差的控制效果如图6(a)–(d)所示.第3.1节已经通过实验对比证明本文提出的ASTW控制器具有更好的动态特性和响应速度,因此,本节实验中只展示了ASTW滑模控制器的结果.从图6(a)中可以看出,负载变化时,氧气过量比可以迅速调节至最优值且超调量较小.图6(b)表明,阳极压力可以迅速跟踪阴极压力的变化.图6(c)显示了阴、阳极压力差的变化,期间最大压差不超过1.6×104 Pa.如图6(e)所示,尽管存在一些波动,氢气过量比还是可以迅速的调节至设定值,保证了阳极氢气的过量供应.仿真结果表明,本文所提出的ASTW滑模控制器能够很好的满足燃料电池系统对氧气、氢气过量比,及阴阳极压差的控制需求.
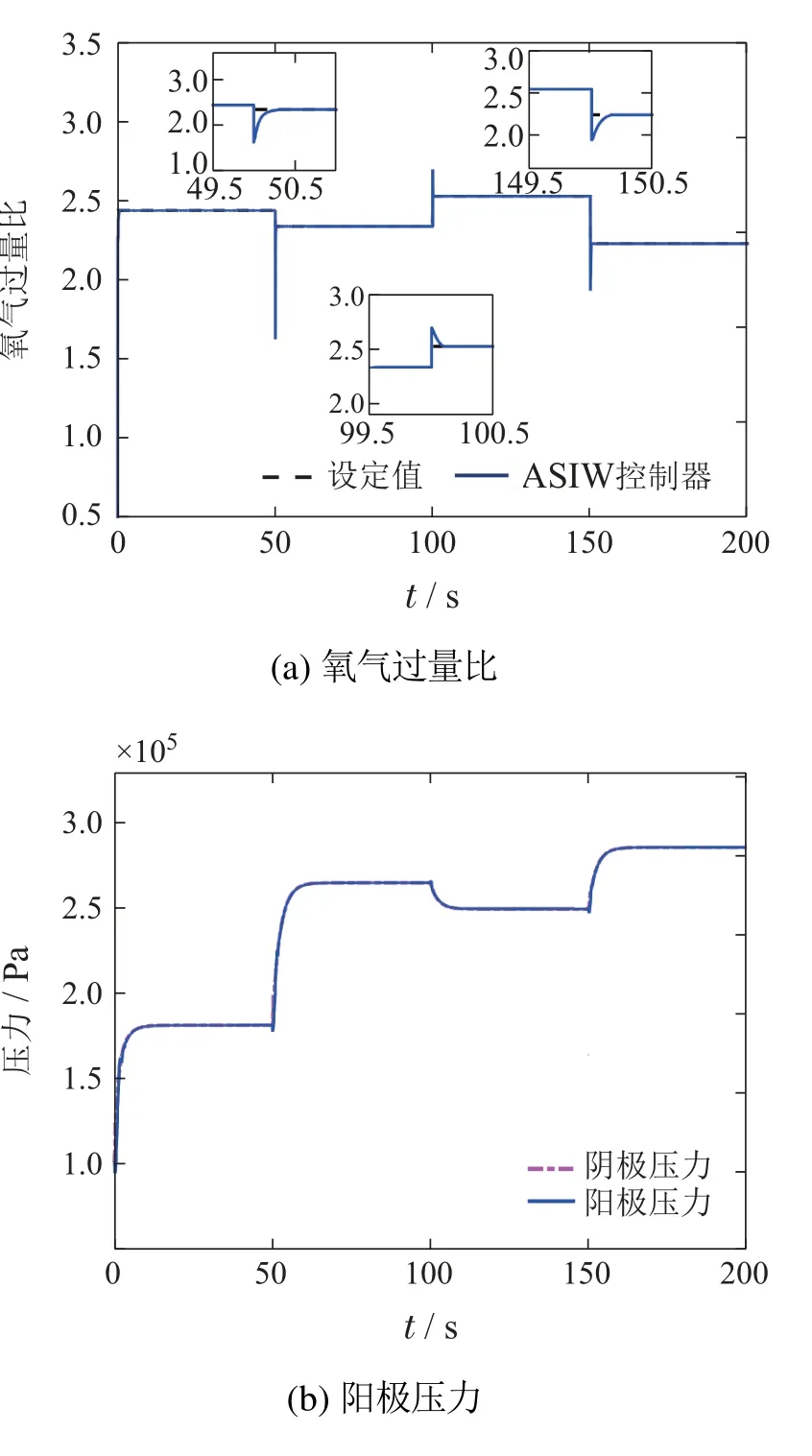
图6 最优氧气过量比仿真结果Fig.6 Simulation results of optimal oxygen excess ratio
5 结论
本文针对燃料电池供气系统阴阳协同控制问题,提出了一种基于ASTW算法的滑模控制器,以控制氧气、氢气过量比,避免氢、氧饥饿现象,同时控制阴、阳极压力平衡.首先,建立了燃料电池供气系统非线性模型,并搭建了燃料电池仿真平台;其次,根据建立的模型设计了基于ASTW的滑模控制器,控制氧气、氢气过量比,以及阴、阳极压力平衡,并利用李雅普诺夫方法证明了该控制器的稳定性;最后,通过仿真分析比较了PID,STW滑模控制及本文提出的ASTW滑模控制器在固定氧气过量比和最优氧气过量比跟踪控制两种应用场景的控制效果.仿真结果表明,与常规PID控制器相比,基于ASTW的滑模控制器在氢气、氧气过量比调节,阴、阳极压力差控制方面具有更小的超调量(2.1×104 Pa)和更短的调节时间(少于5 s).并且与基于STW的滑模控制器相比,该方法具有较好的抖振抑制能力.
猜你喜欢
能源新观察(2023年10期)2023-11-06 14:12:07
中老年保健(2021年7期)2021-08-22 07:43:44
学校教育研究(2019年16期)2019-03-24 04:25:33
中国生殖健康(2019年5期)2019-01-06 09:16:46
西南石油大学学报(自然科学版)(2018年5期)2018-11-06 06:46:24
现代营销(创富信息版)(2018年9期)2018-09-03 09:49:44
遵义(2018年15期)2018-08-28 12:20:14
青少年科技博览(中学版)(2018年12期)2018-02-20 02:08:46
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:08
海军航空大学学报(2015年4期)2015-02-27 13:45:54