基于新型固定时间稳定方法的一类二阶非线性系统镇定控制
2023-12-18 09:45佟明昊
控制理论与应用 2023年11期
邹 权,佟明昊,魏 凯
(南京理工大学机械工程学院,江苏南京 210094)
1 引言
稳定性是控制系统最重要的性能指标之一,也是工程师们设计控制器时关注的重点.目前,大部分已有的控制方法只能得到渐近稳定或指数稳定的结果,即只有时间趋于无穷时,系统状态才能收敛至平衡点.然而,在诸多实际工程中,工程师们希望能够尽快实现控制目标,因此,基于有限时间稳定理论的控制方法应运而生[1–2].与渐近稳定或指数稳定相比,有限时间稳定具有更快的收敛速度和更好的鲁棒性[2–3],因此,在混沌系统[4]、多智能体[5]、液压伺服系统[6]、永磁同步电机[7]和机器人[8]等诸多领域获得了广泛地应用.
目前,常用的有限时间控制方法主要有齐次性法、加幂积分法和滑模控制方法[1–2].其中滑模控制方法具有结构简单、鲁棒性强和控制精度高等特点,在工程上获得了广泛地应用[6,9].限制滑模控制在工程上应用的主要是“抖振”问题.目前常用的滑模“抖振”抑制方法主要有边界层法、高阶滑模法、智能控制法、趋近律法等[10–11].趋近律法由文献[12]首次提出,包括等速趋近律、指数趋近律和幂次趋近律.幂次趋近律通过引入滑模函数的幂次函数而完全消除了切换控制项导致的不连续性,因而可有效消除滑模“抖振”,近年来获得了国内外学者的广泛关注.然而,由于分数阶幂次函数的存在,滑模函数在滑模面附近的收敛速度较慢.为了提高幂次趋近律在滑模面附近的收敛速度,文献[13]在指数趋近律[14]的基础上提出了一种改进的指数趋近律,其主要特点在于采用滑模函数的指数函数在线调整幂次趋近律的增益,因而该方法也可称为变增益幂次趋近律.为了改善滑模趋近律的控制性能,文献[15]同样采用滑模函数的指数函数在线调整趋近律增益,而文献[16]采用系统状态的指数函数在线调整趋近律增益.然而上述方法中均存在切换控制项,因此无法有效抑制滑模“抖振”.
一般来说,有限时间稳定系统的收敛时间与系统的初始状态有关,并且系统初始状态离平衡点越远,收敛时间越长,反之亦然[2].固定时间稳定[17]是在有限时间稳定理论的基础上发展出来的一种新型稳定性方法,其特点在于系统不仅是全局有限时间稳定的,而且收敛时间的上界与系统的初始状态无关,即系统状态不仅能够在有限时间内从任意的初始状态收敛至平衡点,而且收敛时间的上界与系统初始状态无关,可完全由控制参数预先设定.因此,与有限时间稳定性相比,固定时间稳定性具有更好的收敛性能.目前,常用的固定时间稳定判定方法主要有以下几种[2].
目前,固定时间控制的相关研究大多基于上述方法[21–27].基于方法1,文献[21]研究了一类时变系统的固定时间参数辨识问题,文献[22]设计了某潜射导弹的自适应固定时间终端滑模控制器.基于方法2,文献[23]设计了永磁同步电机调速系统的固定时间滑模控制器,文献[24]设了一类二阶非线性系统的非奇异终端滑模控制器.文献[25]采用与方法3类似的形式设计了基于固定时间滑模趋近律的永磁同步电机调速控制器,但是收敛时间及其上界估计值的计算方法均与方法3不同,可认为是方法3的扩展.基于方法4,文献[26]设计了某能量储存系统的快速非奇异终端滑模控制器,文献[27]研究了一类二阶非线性系统的固定时间终端滑模控制方法.类似的研究结果还可参见文献[28–30]以及其中的有关参考文献.值得注意的是,上述4种固定时间稳定判定方法具有类似的形式,由于参数的取值不同而得到了不同的结果,特别是文献[25]给出了收敛时间上界估计值的另外一种形式.除了上述方法外,基于双极限齐次性也可获得固定时间稳定的结果[31],但是无法明确的给出收敛时间的上界,因此限制了其应用.
受滑模趋近律和上述方法的启发,本文提出了一种与上述方法均不相同的固定时间稳定新方法,并给出了收敛时间及其上界估计值的计算公式(详见第3.1节).该方法的主要特点在于利用双曲正切函数的限幅特性,在保证系统稳定性条件的同时提高了收敛速度,进而获得了固定时间稳定的结果.基于所提出的新型固定时间稳定方法,本文设计了滑模趋近律和终端滑模面,并引入了基于系统状态的自适应切换方法有效避免了终端滑模面引起的奇异问题,实现了一类受未知外部扰动侵袭的二阶非线性系统的固定时间镇定控制,并通过仿真验证了算法的有效性.
2 问题描述和预备知识
2.1 问题描述
考虑如下的受未知外部扰动侵袭的一类二阶非线性系统:
式中:x=[x1x2]∈R2为系统状态向量;u∈R为控制输入;y∈R为系统输出;f(x)为系统的非线性动力学特性,且f(x)=0,d(t,x,u)为未知的外部扰动,包含系统未建模动态及模型不确定性.不失一般性,有以下假设.
假设1未知的外部扰动d(t,x,u)有界,即存在未知的常数δ>0满足
本文的目标是,为非线性系统(1)设计一个终端滑模控制器,使系统状态能够在有界的有限时间内从任意的初始状态收敛至平衡点,并且收敛时间的上界可由控制器参数预先设定.
2.2 预备知识
考虑如下的动态系统:
其中:x=[x1x2···xn]T∈Rn是系统状态;f(x):Rn→Rn是实数域内开区间U上关于x的连续函数,且开区间U包含原点,f(0)=0.假设原点是系统的一个平衡点.
定义1[18]若对于任意的初始状态x0∈U0⊂Rn,存在一个连续函数T(x):U0{0}→(0,+∞),使得系统(3)的解满足
2)当t>T(x0)时,x(t,x0)≡0,则称系统(3)的原点是有限时间稳定的(finite-time stable).若U0=Rn则称系统(3)的原点是全局有限时间稳定的(global finite-time stable).若系统(3)的原点是全局有限时间稳定的且收敛时间T(x0)有界,即存在有界的常数Tmax>0,使得对于∀x0∈U0⊂Rn,收敛时间T(x0)满足T(x0)≤Tmax,则称系统(3)的原点是固定时间稳定的(fixed-time stable).
引理1[21]对于系统(3),如果存在一个正定连续可微函数V(x)和两个实数c>0,0<γ<1,使得对于任意的x≠0满足
则系统的原点是有限时间稳定的且收敛时间T(x0)满足
3 主要结论
3.1 新型固定时间稳定方法
定理1对于系统(3),如果存在一个径向无界的正定连续可微函数V(x),使得对于任意的x≠0满足
证首先证明系统的原点是全局有限时间稳定的.由于V(x)是关于x的正定函数,故对于任意的x,即任意的x,有V(x)>0.因此有
由式(6)–(8)可得
由于p和q均为正的奇整数且q>p,故有0<λ=.注意到V(x)是径向无界函数,因此,由引理1可知,系统(3)的原点是全局有限时间稳定的.
接下来计算收敛时间.式(6)可重写为
两边同时乘以α(1-λ)dt得
注意到T(x0)为收敛时间,故有x(T(x0))=0和V(x(T(x0)))=0.因此,式(11)两边同时积分可得
注1当α=0时,式(6)可改写为(x)≤-kVλ,此时本文提出的固定时间稳定等价于引理1中的有限时间稳定,且收敛时间可由下式给出:
因此,由式(16)可知,对于给定的任意α值以及相同参数k和λ,本文提出的固定时间稳定比传统的有限时间稳定具有更快的收敛速度,且收敛时间的上界值与系统初始状态无关.
注2由式(6)可以看出,本文提出的固定时间稳定方法与方法1–4均不相同,且收敛时间上界的估计值也不相同,这也是本文的主要贡献之一.
注3由式(7)可知,本文提出的固定时间稳定的收敛时间的上界可由参数k,α和λ调整.虽然通过选取较大的k,α和较小的λ值可有效减小收敛时间的上界,但是由于系统带宽的限制,较大的k,α值或较小的λ值可能会导致稳定性问题.因此,在实际应用时应综合考虑考虑收敛速度和系统稳定性选取合适的k,α,λ值.
3.2 固定时间镇定控制器设计
本节将基于上述固定时间稳定方法设计基于滑模趋近律的终端滑模控制器,实现系统(1)的固定时间镇定控制.定义如下的终端滑模面:
本文提出的基于滑模趋近律的固定时间终端滑模控制器为
注4控制器(18)中u1也可写为
定理2假设系统(1)满足假设1,如果控制器设计为式(18)且滑模函数由式(17)给出,则闭环系统是固定时间稳定的,且对于任意的初始条件x0∈R2,收敛时间的上界为
证式(17)求导并把式(1)代入得
把控制律式(18)代入到式(23)得
定义如下的李雅普诺夫函数:
显然,V1是滑模函数s的径向无界函数.注意到1->0,式(25)求导并把式(24)代入可得
由式(25)可知,滑模函数s将随着李雅普诺夫函数V1在同样的固定时间收敛至滑模面.当系统状态位于滑模面上时,由式(17)可知,系统动态可由下式描述:
故有
定义如下李雅普诺夫函数:
显然,V2是x1的径向无界函数.式(30)求导并把式(29)代入得
由式(30)可知,系统状态x1也将随着李雅普诺夫函数V2在同样的固定时间收敛至原点.类似地,由式(29)可知,系统状态x2也将在同样的固定时间收敛至原点.
综上所述可知,闭环系统的状态将先在时间T1内收敛至滑模面s=0,然后沿着滑模面在时间T2内收敛至原点,故闭环系统是固定时间稳定的,且收敛时间的上界可由式(22)估计.证毕.
由控制器(18)可知,控制律中包含不连续控制项ηsgns,因此会引起抖振问题.为了减小抖振,可将参数η设置为0,即η=0.此时系统(1)是固定时间有界稳定的,并有以下定理:
定理3若定理2中切换项增益η=0,其他参数与定理2相同,则闭环系统状态将在固定时间内收敛至包含原点的有界的范围内,且收敛范围可由参数k1,α1,λ1和k2,α2,λ2调整.
证注意到η=0,式(24)可重写为
定义如下的李雅普诺夫函数:
显然,V3为径向无界函数.式(34)求导并把式(33)代入得
则有µ>0.故由定理1可知,系统的原点是固定时间稳定的.然而,随着滑模函数s的减小,式(38)不再成立,此时系统的稳定性无法确定.但是若滑模函数s的值增加使得式(38)再次成立,则系统将恢复到固定时间稳定状态.综上所述,滑模函数s将随着李雅普诺夫函数V3在固定时间收敛至有界的范围内,即
值得注意的是,虽然式(39)两边均包含滑模函数s,但是由于对于任意的滑模函数s和系统状态x1,有
故由式(39)可得
此外,由Ψ2=tanh(α2s1-λ2)可知,对于任意的s≠0,可通过调整参数α2可有效减小1-的值,进而减小滑模函数s的收敛范围.同理,通过调整参数α1也可有效减小滑模函数s的收敛范围.综上所述,当η=0时,滑模函数式(17)将在固定时间收敛至包含原点的有界范围内,如式(42)所示.此外,滑模函数s的收敛范围可由参数k2,α2,λ2和α1调整.假设滑模函数s收敛至由式(42)给出的范围后的实际值为ζ,即s=ζ,则
由式(17)可知,此时系统动态可由下式给出:
定义如下李雅普诺夫函数:
显然,V4为径向无界函数.注意到式(43)(46)求导并把式(45)代入得
由式(28)可知,系统状态x2也将在固定时间内收敛至有界的范围内.由式(40)(42)可知,滑模函数的收敛范围可由参数α1和α2调整,故系统状态的实际收敛范围也可由参数α1和α2调整.
综上所述,闭环系统状态将在固定时间内收敛至包含原点的有界的范围内,且收敛范围可由参数k1,α1,λ1和k2,α2,λ2调整.证毕.
注5由式(42)可知,当参数k2选择较小值且Ψ1和Ψ2的值也较小时,如k2≤δ,Ψ1≈0,Ψ2≈0,则滑模函数的收敛范围将有可能大于δ.为了避免上述问题,可选取较大的k2取值,如k2>δ.此外值得注意的是,若选取较大的α1和α2值使得Ψ1≈1且Ψ2≈1,即使选取较小k2值也可有效避免上述问题.同样的,由式(49)可知,参数k1也应选取较大的值以获得较小的收敛范围.综上所述,当η=0时,应选取较大的k1,k2,α1,α2等参数以获得满意的控制效果.
3.3 奇异性分析
由控制律式(18)可知
由于0<λ1<1,故当x1=0且x2≠0时,式(51)存在奇异问题.为了避免奇异问题,受文献[26]启发,对式(51)作如下修改:
式中Ω>0为待设计的常数.根据系统状态x1的不同,式(52)可重写为
由式(53)可知,系统不存在奇异问题.
注6注意到当|x1|<Ω时,系统虽然不存在奇异问题,但闭环系统的固定时间稳定性被破坏.因此,应尽量选择较小的Ω值.然而,当Ω很小时,无法有效避免奇异问题.综上所述,应综合考虑奇异性和收敛性,选择合适的Ω值.
4 算例与仿真验证
为了验证算法的有效性,考虑如下的非线性系统[31]:
本文算法与文献[20]和文献[31]中算法进行了对比.文献[20]中的算法为
式中: 参数Ω的作用与本文中算法相同,均是为了避免奇异问题,Ω=0.001.文献[31]中的算法为
不同初值条件下的仿真结果分别如图1–3所示,可以看出:与文献[31]和文献[20]中的算法相比,本文所提出的算法具有较好的控制性能,并且对于不同的初始条件,系统状态均能在1.0 s内收敛至零.值得注意的是,由于切换控制项的存在,本文和文献[20]中的算法均包含高频抖振信号,而文献[31]中算法由于积分作用,不存在高频抖振信号,但是其控制效果较差.
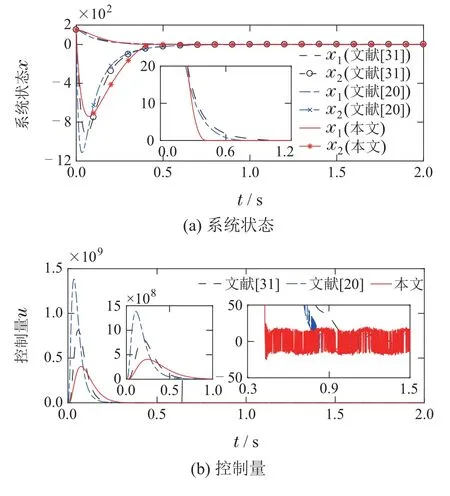

图1 初值为(150,150)时仿真结果Fig.1 Simulation results with initial conditions(150,150)

图2 初值为(100,100)时仿真结果Fig.2 Simulation results with initial conditions(100,100)
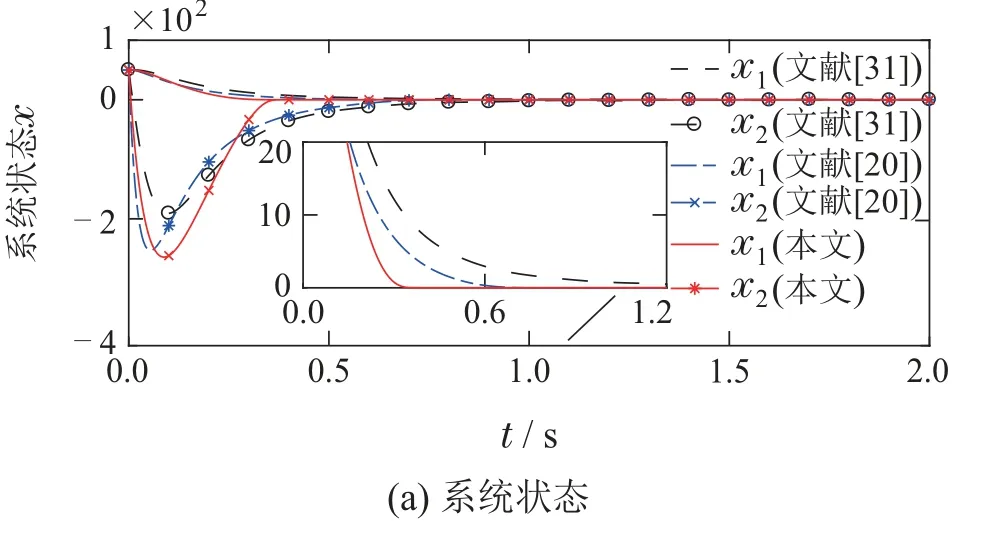
图3 初值为(50,50)时仿真结果Fig.3 Simulation results with initial conditions(50,50)
为了验证定理3,将本文所提出的控制算法切换项增益设置为η=0,其他控制器参数不变,初始条件为x1(0)=x2(0)=50,仿真结果如图4所示.由图4可知,两种情况下系统的收敛速度基本相同.与η=10相比,虽然η=0时系统的位置误差较大,但其速度波动较小,控制信号的抖振也较小.
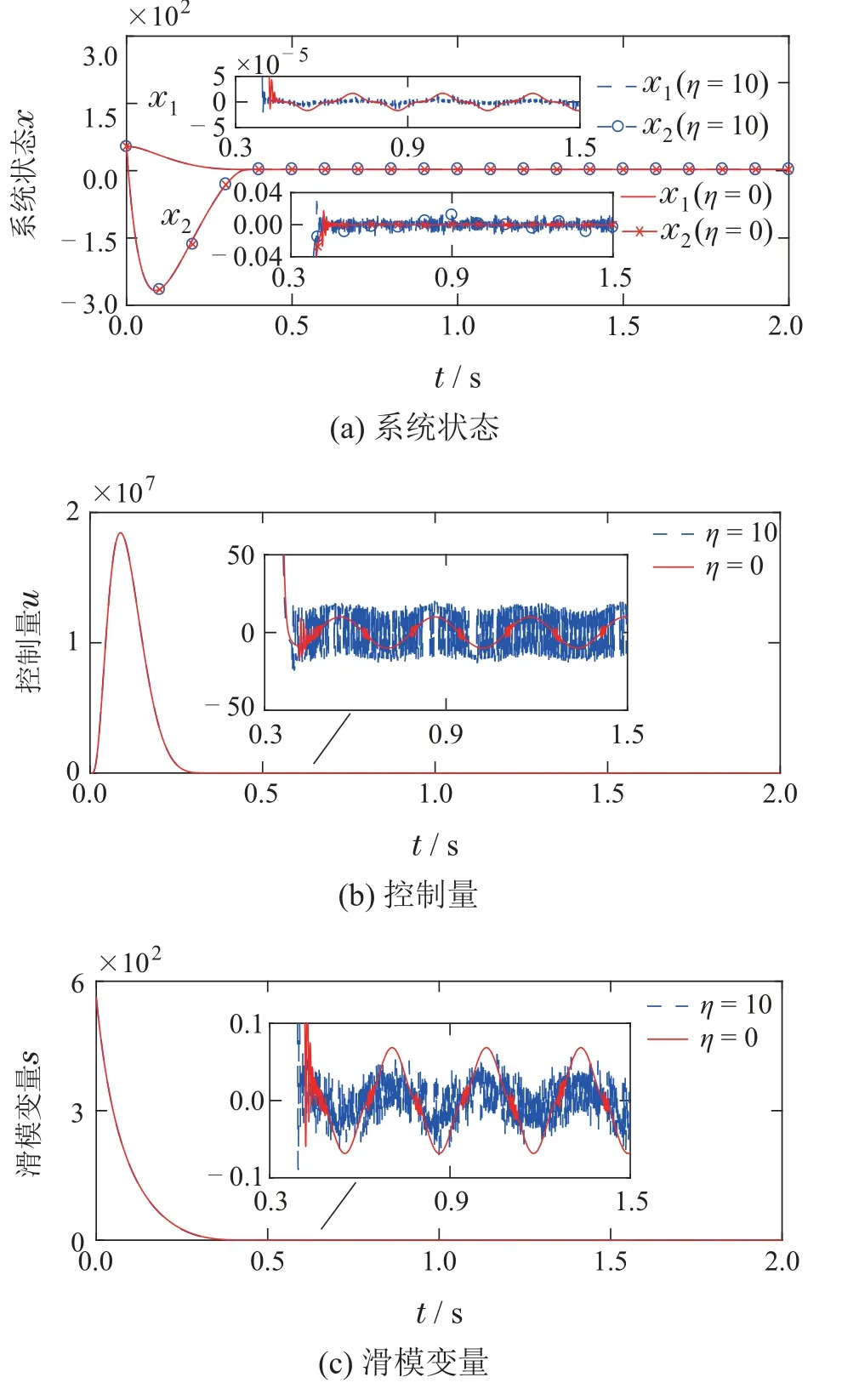
图4 不同η值的仿真结果Fig.4 Simulation results with different η
为了验证参数Ω的影响,系统的初始条件设置为x1(0)=x2(0)=50,不同Ω取值的仿真结果如图5所示.由图5可以看出,当Ω=0时,由于系统存在奇异问题,稳态时存在较大的位置和速度波动,而当Ω取值较小时(Ω=1×10-4)即可有效避免奇异问,但是随着Ω取值增大(Ω=1),系统的收敛速度变慢且存在振荡,并且振荡的幅值随着Ω增大而增大.因此,应综合考虑奇异性和收敛性,选择合适的Ω值.
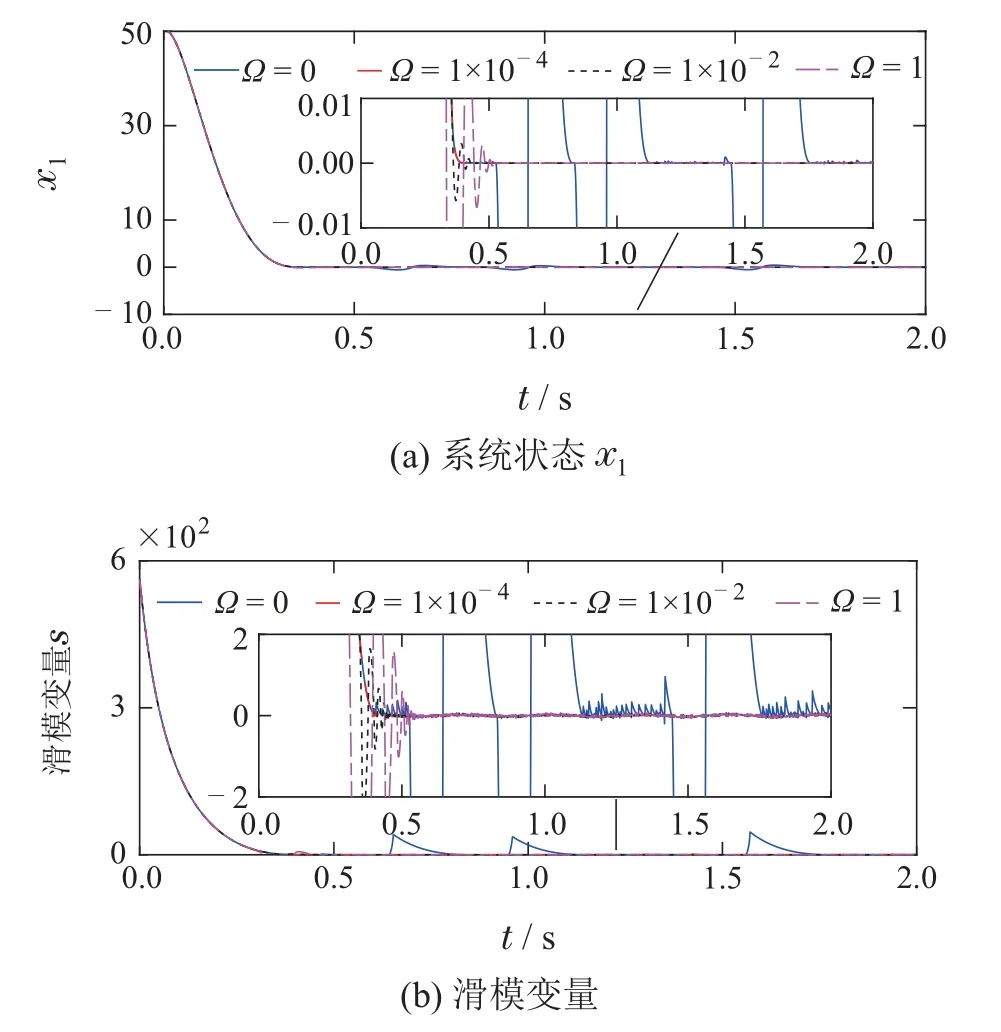
图5 不同Ω值的仿真结果Fig.5 Simulation results with different Ω
5 结论
本文研究了受未知外部扰动侵袭的一类二阶非线性系统的固定时间镇定控制问题.根据固定时间稳定性理论,本文利用双曲正切函数的限幅特性提出了一种新的固定时间稳定方法,并给出了收敛时间及其上界值的计算公式.基于所提出的固定时间稳定方法,本文设计了固定时间收敛的终端滑模面和滑模趋近律,并引入了基于系统状态的自适应切换方法避免了奇异问题,实现了系统的固定时间稳定和固定时间有界稳定.仿真结果表明,与文献[20]和文献[31]中的方法相比,本文所提出的控制方法具有较好的控制性能.
猜你喜欢
现代苏州(2019年16期)2019-09-27
语言与文化论坛(2019年3期)2019-04-13
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
湖北文理学院学报(2017年2期)2017-04-16
燕山大学学报(2015年4期)2015-12-25
筑路机械与施工机械化(2014年4期)2014-03-01
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28