基于TOA算法的UWB室内定位的定标方法
2023-12-18 07:36:50彭甫镕
测控技术 2023年11期
董 宇, 逯 暄, 彭甫镕, 张 婷
(1.山西大学 物理电子工程学院,山西 太原 030006; 2.山西大学 大数据科学与产业研究院,山西 太原 030006)
高速发展的物联网可以为人们的生产生活提供先进便利的智能服务[1],而人员、设备、物品的位置信息是智能服务的重要前提。GPS、北斗等全球导航卫星系统在室外可以提供可靠的实时位置信息[2],但在室内、隧道、矿井等环境由于卫星信号衰弱,导航系统无法有效使用[3],室内精准定位成为上述应用中亟待解决的关键技术。
超宽带(Ultra Wide Band,UWB)是目前室内定位领域的研究热点之一[4],其兼容IEEE 802.15.4标准,直接调制具有陡峭上升沿和下降沿的时间脉冲,使信号具有GHz数量级的带宽和厘米级的定位精度。与其他定位技术相比,UWB具有安全性高、穿透力强、时间分辨率高、硬件结构简单、抗多径能力强等优点[5-6],因而被广泛应用于各种室内活动场景,如地下矿工定位、智能博物馆指南[7]、大型地下车库车辆反向追踪等。
UWB信号的时间分辨率高,基于时间的定位方法定位精度要高于信号接收强度(Received Signal Strength Indication,RSSI)与到达角(Angle of Arrival,AOA)的定位精度[8]。到达时间(Time of Arrival,TOA)定位是根据定位信号到达时间进行定位,要求基站和标签之间严格时钟同步,否则将导致巨大的计算误差,1 μs的微小时钟偏差也会产生近30 cm的定位偏差[9]。
实际工程应用中,基站和标签间保持高度时钟同步很难实现。因此双向飞行测距[10-11](Two-Way Ranging,TWR)被提出,但是TWR通信过程复杂,通信双方之间需要至少通信2次,不仅造成通信带宽的浪费,增加了通信网络负担[8],而且容易造成信号的碰撞与丢失。因此基于差分GPS技术[12-13],本文提出了一种应用于UWB-TOA室内定位系统的时钟定标方法,通过引入定标标签对时钟误差进行补偿,校正由时钟不同步引起的定位误差,提高定位精度的同时节约了通信带宽资源。
1 TOA室内定位与Chan算法
TOA定位方法的原理是在空间中布置一定数量的基站接收标签发射的信号,通过测量信号从标签到各基站的传播时间(距离),再利用圆周定位法[14]解算标签所在的位置。例如在一个平面上,3个基站可以确定标签的位置,如图1所示。假设3个基站A、B、C的位置已知,坐标分别为(XA,YA)、(XB,YB)、(XC,YC),待定位标签的坐标为(x,y);标签在t=0时刻发射定位信号,与此同时A、B、C这3个基站开始接收,并分别于tA、tB、tC时刻接收到定位信号,那么标签到3个基站的距离RA、RB、RC如式(1)所示:
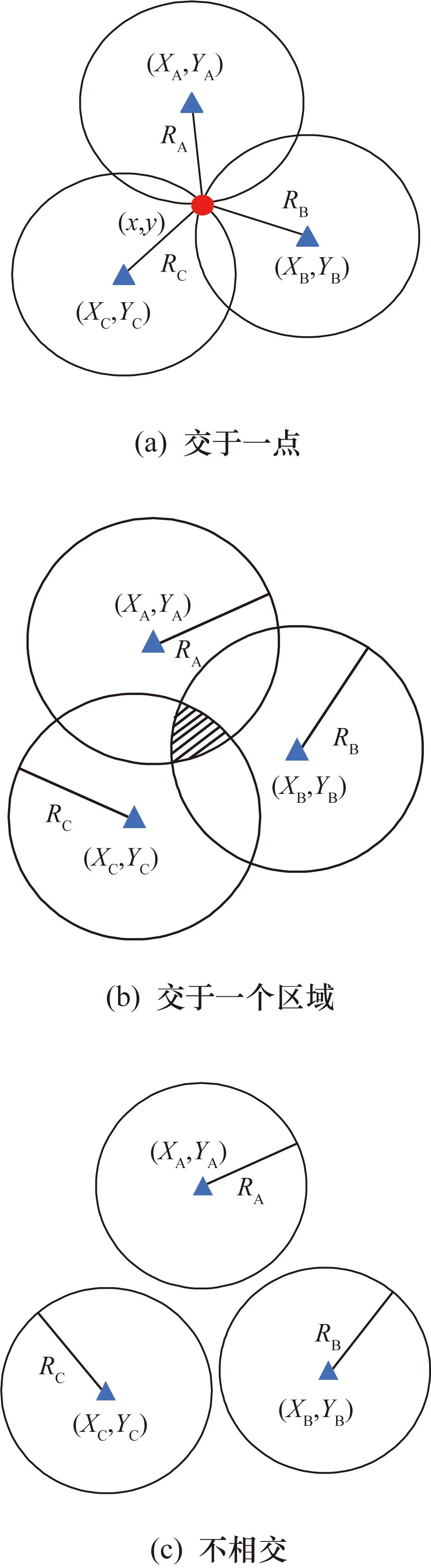
图1 TOA定位
(1)
式中:c为光速。分别以A、B、C这3个基站的坐标为圆心,以RA、RB、RC为半径画圆,3个圆的交点就是标签的位置,如图1(a)所示,即标签的坐标(x,y)为式(1)的解[15-16]。
然而,由于基站和标签时钟不同步,计算得到的RA、RB、RC存在误差,图1(a)中的3个圆会出现没有交点的情况,如图1(b)和图1(c)所示,导致式(1)无解,因此补偿由时钟不同步引起的定位误差是必要的。
Chan算法是一种非递归双曲线方程组解法,采用两步最小二乘估计[17],当环境噪声服从高斯分布时,定位精度高且计算量小,并且可以通过增加基站数量来提高定位精度[18],因此本文采用Chan算法求解式(1)。
2 基站与标签的时钟定标
当基站与标签时钟同步时,Chan算法能够进行精确定位,但在实际应用中,基站与标签的时钟很难保持高度同步。假设3个基站与标签的时钟差为Δti(i=A,B,C),标签仍在t=0时刻发射定位信号,3个基站分别在ti时刻接收到信号,那么如图2所示,标签与各基站之间的测量距离为Ri=c·ti,但实际距离为R′i,计算公式如下:
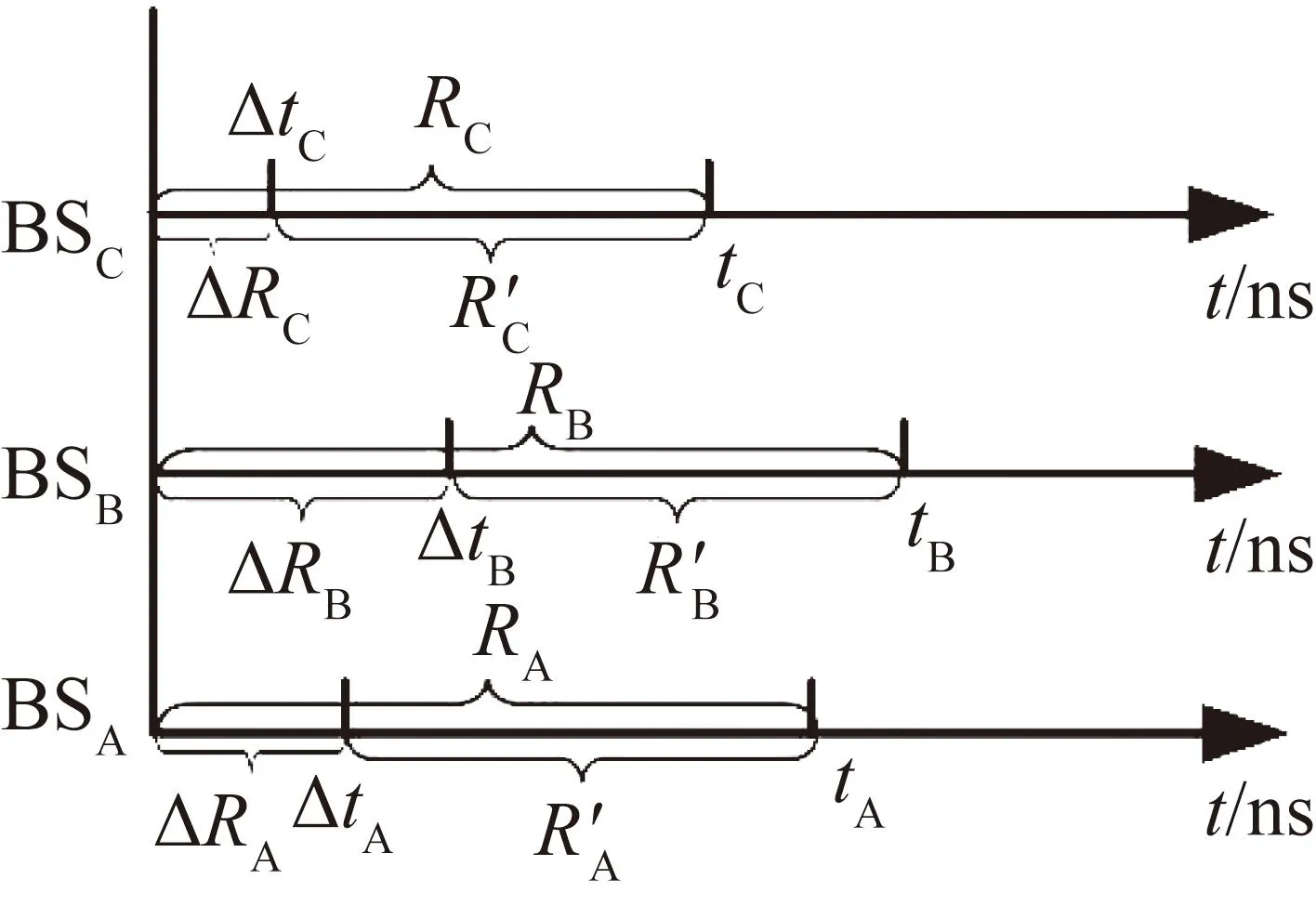
图2 时钟不同步引起定位误差原理图
(2)
与测量距离相差了c·Δti。若不考虑该误差,将Ri直接带入式(1),求解得出的标签位置(x,y)将有较大的偏差。如果能测得Δti并将Δti·c补偿到测量距离中,即可实现精确定位。
因此,本文在TOA定位系统的基础上,增加一个位置已知、精度高、稳定性强并与待定位标签时钟差为未知定值ΔT的定标标签(x1,y1)发送定标信号,各基站除了接收待定位标签的定位信号外,还接收定标标签的定标信号;待定位标签也接收定标信号。在定位测量前,先进行一次定标测试:将待定位标签置于某已知位置(x0,y0),定标标签在t=ΔT时刻发送定标信号后,待定位标签与各基站分别于t10+ΔT、t1i+ΔT时刻接收到该信号,那么待定位标签、各基站与定标标签之间的测量距离为R10、R1A、R1B、R1C,计算公式如下:
(3)
(4)
且为已知,将式(3)带入式(4)可以依次求得ΔT和Δti,计算公式如下:
(5)

3 仿真实验
3.1 仿真场景建立
在MATLAB中对TOA室内定位和本文提出的定标方法进行仿真实验。假设室内空间为12 m×9 m的矩形,采用4个基站提高Chan算法的定位精度。4个基站A、B、C、D分别布置于矩形的4个顶点,坐标分别为(0,0)、(12,0)、(12,9)、(0,9),定标标签置于(6,4.5)。对待定位标签的两种运动轨迹进行仿真实验。
轨迹1:由a点(2,1)出发,经b点(10,1)、c点(10,8)、d点(2,8)回到a点,做轨迹为矩形的运动,运动速度v=0.5 m/s,采样间隔为1 s,共采样65点。
轨迹2:由a点(2,8)出发,经b点(10,8)、c点(2,1)、d点(10,1)回到a点,做轨迹为叉形的运动,运动速度v=0.5 m/s,采样间隔为1 s,共采样65点。
轨迹3:由a点(11,4.5)出发经b点(6,8.5)、c点(1,4.5)、d点(6,0.5)回到a点,做轨迹为椭圆的运动,角速度ω=π/45 rad/s,共采样91点。
仿真时加入均值为0、方差为0.1的高斯白噪声。定标标签与待定位标签的固定时钟差ΔT、各基站与待定位标签之间的时钟差Δti各不相同,分为以下4种情况:
① 均为固定时钟差。
② 均为线性时钟差,Δti=Kit,其中Ki为各基站时钟误差随时间变化的斜率。
③ 均为正弦非线性时钟差,Δti=Ai·sin(ωit+φi),其中Ai为各基站时钟差函数的幅度,ωi为时钟差函数的频率,φi为时钟差函数的相位。
④ 线性时钟差与正弦非线性时钟差组合。

图3分别比较了上述4种时钟差时,定标补偿前后待定位标签矩形和椭圆运动轨迹。其中,固定时钟差的参数与定标测试相同;线性时钟差的Ki分别取0.1、0.2、0.06、0.16;正弦时钟差计算公式如下:
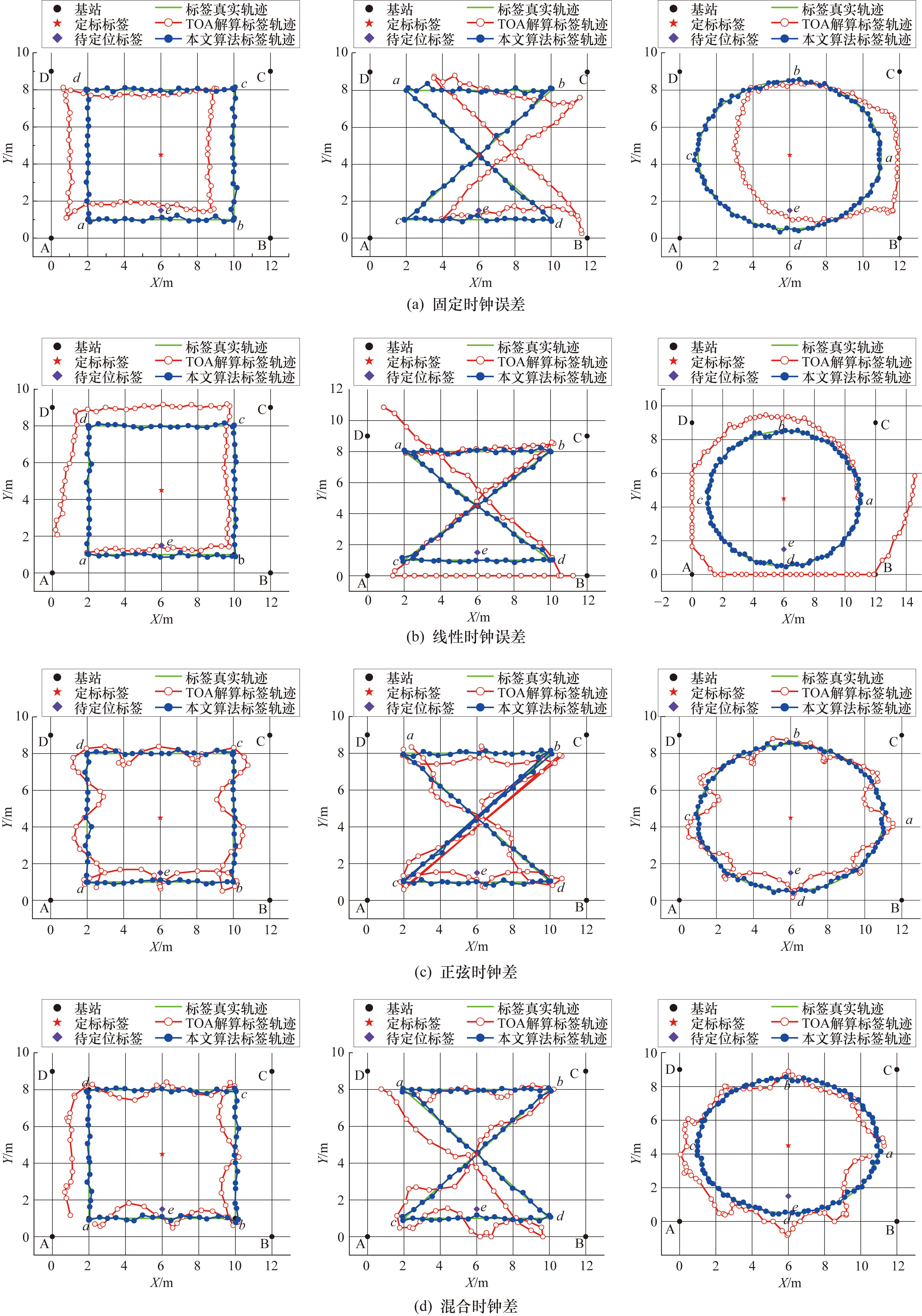
图3 定标前(TOA)、后标签运动轨迹图
(6)
组合时钟差计算公式如下:
(7)
单位为ns。
3.2 实验结果分析
3.2.1 标签轨迹变化趋势
图3为定标前(TOA)、后标签运动轨迹图。由图3可以看出,定标后标签的运动轨迹更接近于真实的运动轨迹。定标前(TOA)解算出的标签轨迹与时钟差变化趋势相同。
① 图3(a)中由于时钟差是固定不变的,因此定标前(TOA)解算出的轨迹是一个整体偏离真实值的轨迹。
② 图3(b)中由于时钟差随时间逐渐线性增加,因此待定位标签从a点出发以后,定标前(TOA)解算出的运动轨迹与真实轨迹之间的偏差也逐渐增大。
③ 图3(c)中当时钟差正弦变化时,定标前(TOA)解算出的标签轨迹也同样呈正弦变化,并且周期与时钟差的变化相符。
④ 图3(d)中混合时钟差时,标签的运动轨迹同时体现了线性变化与正弦变化的特点。
3.2.2 时钟定标前/后RMSE分析
表1为定标前(TOA)、后定位性能对比,列出了解算标签运动轨迹与真实运动轨迹的均方根误差(Root Mean Square Error,RMSE),RMSE计算公式如下:
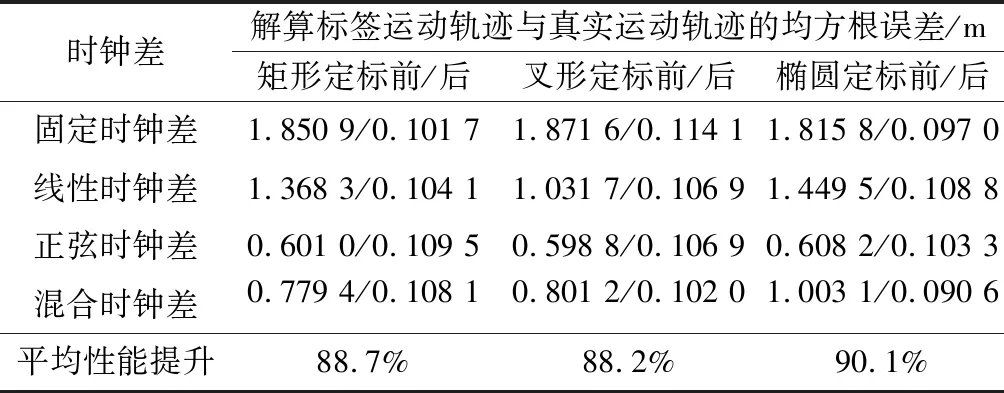
表1 时钟定标前(TOA)、后定位性能对比
(8)
定标后的均方根误差相较于定标前(TOA)的均方根误差明显减小。
① 矩形轨迹4种时钟差情况下,均方根误差分别减小了1.749 2 m、1.264 2 m、0.491 5 m、0.671 3 m。定位精度提升了94.5%、92.4%、81.8%、86.1%。
② 叉形轨迹4种时钟差情况下,均方根误差分别减小了1.757 5 m、0.924 8 m、0.491 9 m、0.699 2 m。定位精度提升了93.9%、89.6%、82.1%、87.3%。
③ 椭圆轨迹4种时钟差情况下,均方根误差分别减小了1.718 8 m、1.340 7 m、0.5049 m、0.904 5 m。定位精度提升了94.7%、92.5%、83%、90.2%。
3.2.3 通信性能分析
与TWR方法相比,本文提出的时钟定标方法充分利用了通信系统容量,节省了带宽资源。
表2中给出了完成一次定位时不同方法的通信性能对比,其中M为基站数量,取M≥4。随着基站数量的增加,TWR方法完成一次定位所需传输的数据包数量随之增加,而时钟定标方法所需传输的数据包数量不变。
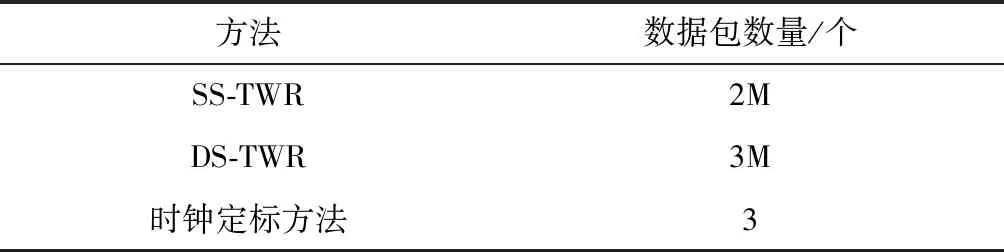
表2 完成一次定位时不同方法通信性能对比
综上所述,本文提出的定标方法能够补偿由于时钟不同步引起的定位误差,可以在保持高定位精度的同时节省通信带宽资源。
4 结束语
本文针对TOA算法中与待定位标签时钟不同步导致定位精度低的问题,提出了一种用于UWB-TOA室内定位系统的时钟定标方法。通过增加定标标签与定标测试,求解基站与待定位标签的时钟差,并将其补偿到测距与定位中,在提高TOA定位精度的同时节省了通信带宽资源。在MATLAB中对基站与待定位标签的4种时钟差进行了定标,结果表明定标后的运动轨迹更接近于真实轨迹,定位精度提升了85%以上,验证了该方法的正确性与有效性。本文的方法适用于定标标签与待定位标签为定值、基站与待定位标签的时钟差为定值或时变的场合。
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
今日农业(2021年19期)2022-01-12 06:17:00
数学小灵通·3-4年级(2021年9期)2021-10-12 05:47:46
空间科学学报(2020年1期)2021-01-14 00:53:20
小学生学习指导(低年级)(2020年10期)2020-11-09 09:21:58
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
成都信息工程大学学报(2017年6期)2017-03-16 03:04:30
数学大王·中高年级(2017年2期)2017-02-08 15:52:55
学苑创造·A版(2016年4期)2016-04-16 17:57:51