基于机器视觉的光伏电站绝缘子机械故障检测研究
2023-12-18 07:36张一新
测控技术 2023年11期
朱 进, 张一新
(申能新能源(青海)有限公司,青海 西宁 810099)
光伏电站的绝缘子是传输系统中的关键部件,在自然环境下受到风暴、地震和大雨等因素的影响会导致光伏电站出现故障,因此对绝缘子机械故障进行检测对于推进智能电力巡检有很大帮助。
近年来很多国内外学者对绝缘子的机械故障检测进行了大量的研究,Yu等[1]为解决绝缘子样本较少的问题,提出了使用纹理特征增强结合SINet网络对绝缘子机械故障进行识别,准确度达到了99.82%。吴涛等[2]提出了使用K-means算法结合YOLO(You Only Look Once)检测框架对绝缘子机械故障进行识别。王孝余等[3]为解决绝缘子裂缝故障的问题,提出了使用YOLO结合注意力机制对绝缘子机械故障进行检测。Wei[4]提出使用霍夫椭圆检测结合Canny边缘检测对复合绝缘子的机械故障进行识别。谢黎等[5]为了解决传统元器件缺陷检测效率低的问题,提出使用改进的YOLOv4目标检测网络进行训练,使用多尺度融合结合K-means算法进行缺陷检测。高小伟等[6]为提高多尺度目标的检测精度,提出了使用无锚框输电线的检测网络,精度可达78.31%。卢锦玲等[7]为了提高绝缘子机械故障检测的实时性和准确率,提出使用可分离卷积的轻量级神经网络对绝缘子机械故障进行检测,在故障检测的速度和精度方面有大幅度提高。刘东东[8]为了提高人工巡检的效率和安全性,提出使用卷积神经网络对绝缘子故障进行检测。顾桂梅等[9]提出了使用遗传算法结合BP神经网络算法对绝缘子机械故障进行识别,与传统的算法相比,改进后的算法准确率达到了85.5%。陈潇等[10]为了解决绝缘子机械故障准确率和效率低的问题,提出了使用改进的U-Net卷积网络,增加空洞卷积和全尺度跳跃的信息,实验表明算法的准确率和精度都有所提高。姜浩然等[11]提出了一种航拍图像的绝缘体故障诊断方法,首先使用大津法对绝缘子图像进行分割,然后利用Hough变换进行椭圆检测,根据绝缘体的位置信息检测是否掉串。针对自然环境下绝缘子光照不均的情况,黄新波等[12]提出了一种基于改进的色差法图像分割方法,首先进行亮暗区域的划分并进行光照补偿,采用自适应阈值分割算法结合几何形状分析法进行分割。为提高绝缘子的识别准确率,翟永杰等[13]提出了使用形态学算法、连通域标记和大津法进行图像分割,提取绝缘体骨架,最后应用Ada Boost算法进行粗定位区域遍历识别。针对人工巡检绝缘体效率差、安全性低等特点,王淼等[14]率先使用图像预处理技术进行连通域标记和形状特征提取,从多个角度对绝缘子机械故障进行检测,识别效果较好。严凯等[15]提出了不同背景下绝缘子图像分割方法。为了提高玻璃绝缘体的诊断效率,林聚财等[16]使用颜色统计识别结合边缘连码的特性,能够在不同的光照变化条件下根据滑动窗口直方图识别绝缘子机械故障区域。马帅营[17]对绝缘子的分割进行研究,根据倾斜校正结合投影的方法,缩小包含绝缘子的分割区域,然后利用HSI(Hue,Saturation,Intensity)颜色空间和最大方差法进行分割。Reddy等[18]提出了离散正交变换和智能分类算法判断视频中监控的绝缘子状态。廖圣龙[19]为解决人工巡检效率和准确率较低的问题,提出了一种各类检测方法结合故障诊断的集成算法对关键部件进行缺陷检测。针对绝缘子机械故障检测问题,韩正新等[20]使用最大熵值分割法结合绝缘子轮廓进行检测工作,然后再采用基于空间序列关系建立的特征检测算法,从而对图像中不重叠绝缘子的机械故障进行检测和识别工作。Wu等[21]设计了新的轮廓模型,根据轮廓内外局部纹理分布的差异性将纹理不均的绝缘子进行分割,提高了故障诊断的效率。王子昊[22]为解决传统巡检绝缘子的效率低、安全性差的问题,提出了采用深度学习技术对绝缘子和销钉故障进行检测的方法,绝缘子故障检测准确率达到了91.25%。陈景文等[23]针对无人机在复杂背景下拍摄分辨率低的绝缘子图像,人工特征提取易丢失细节等信息问题,提出了使用U-Net分割网络对绝缘子进行分割,通过将低维特征与高维特征融合,提高了绝缘子的定位精度,准确率达到88.9%。陈庆等[24]提出了利用改进的卷积神经网络进行绝缘子机械故障检测,根据提取的特征使用自组织特征映射网络进行检测,最后使用超分辨分割结合区域检测对绝缘子进行机械故障的检测。
综上所述,现有的绝缘子机械故障检测算法主要采用图像处理技术,虽然取得了一些研究成果,但至今仍未能有效识别绝缘子的机械故障,使用深度学习模型检测准确率较高,但存在训练数据集样本较少、模型泛化性较差等问题。传统图像处理算法存在稳定性差、易受到光照不均影响的问题,对此,本文提出了一种改进的绝缘子机械故障检测算法,首先对绝缘子图像进行亮度修正,能够将不同光照下的亮度进行均匀化,适应不同光照下的绝缘子检测,从而提高模型训练的泛化性,然后使用改进的FCN(Full Convolutional Network,全卷积网络)进行绝缘子分割、连通域标记和质心坐标的计算,最后建立绝缘子机械故障定位模型,根据等距质心定位绝缘子机械故障位置。
1 材料与方法
1.1 光伏电站绝缘子图像采集
本研究以无人机采集的光伏电站绝缘子图像作为试验对象,由于光伏电站绝缘子是在自然环境下进行工作,因此无人机采集的图像是在白天进行的,将绝缘子图像的分辨率调整为700像素×900像素。根据光伏电站绝缘子工作环境多变的情况,在多雾和受光不一致的环境中分别抓拍了光伏电站绝缘子200幅图像作为试验对象。
1.2 光伏电站绝缘子机械故障检测总体实现方案
光伏电站绝缘子机械故障检测实现方案如图1所示,主要分为4部分:① 对绝缘子图像进行滤波和U分量的提取(在1.3节做了详细介绍);② 使用改进的FCN网络对绝缘子进行分割,并进行连通域标记;③ 对连通域标记后的图像进行颜色阈值和K-means聚类计算质心坐标(在1.4节和1.5节做了详细介绍);④ 建立绝缘子机械故障检测模型,使用等距质心定位绝缘子机械故障位置(在1.6节做了详细介绍)。
1.3 图像预处理
1.3.1U分量提取
光伏电站绝缘子图像是由无人机在自然环境下进行采集所得,因此需要对图像的噪声进行高斯滤波,然后对采集的图像进行U(亮度)分量的提取,如式(1)所示。
(1)
由式(1)可知,RGB颜色空间转换到YUV颜色空间能够保持原有色彩结构不变,呈线性关系,不影响原有图像色彩的对应关系。Y(亮度)、U(色度)和V(饱和度)能够组成各不相同的颜色,UV表示色差,能够对图像的色彩以及饱和度进行描述。YUV颜色空间的Y分量具有光照适应性强的特点,需要对Y分量进行亮暗区域(0~255灰度值)的划分。
1.3.2 图像增强
光伏电站绝缘子的工作条件多为自然环境,图像采集过程中会受到来自不同角度光照的影响,因此需要对图像不同区域的光照强度进行均衡化。
传统的图像亮度均衡化方法采用线性变换的方式,会导致图像的部分区域出现过亮或过暗的情况,因此使用了非线性变换的图像增强方式,将提取出的U分量的像素灰度值通过非线性运算转换为与原像素相对应的灰度值,如式(2)所示。
(2)
式中:O为图像亮度均衡化后的像素值;I为图像亮度均衡化之前的像素值;γ为图像亮度的修正系数。当γ<1时,图像部分区域的亮度会增加;当γ<1时,图像部分区域的亮度会降低。
γ=0.6时的亮度均匀化前后的效果如图2 所示,能够看出地面的物体和输电设施的亮度得到了均匀化。
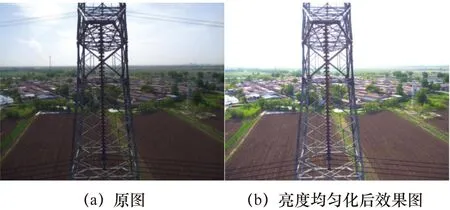
图2 γ=0.6时的亮度均匀化前后效果图
1.4 改进的FCN网络绝缘子目标分割
光伏电站绝缘子轮廓的精确分割会影响绝缘子机械故障检测的准确率,同时由于光伏电站的绝缘子干扰信息比较多,比如电线、空中的丢弃物和鸟粪等干扰物,在感受野较小的情况下容易降低绝缘子机械故障检测的准确性,故不仅需要对浅层网络进行几何信息的提取,还需要感受野较大的全局信息,使用跳跃结构进行多尺度特征融合解决该问题。
本研究在Shelhamer等[25]提出的传统FCN全卷积网络的基础上进行了改进,如图3所示。本文所使用的绝缘子分割模型通过增加卷积运算进行了改进,首先对传统的FCN网络的第2个池化层和第4个池化层增加卷积运算,提高网络对绝缘子边缘的分割精度,然后将网络输出的特征图进行2倍上采样,并与第4个池化层增加卷积运算后的特征图进行融合,从而得到特征图-16。最后将特征图进行2倍上采样得到特征图-8,然后将pool2进行卷积运算后的特征图进行融合得到特征图-8,并进行上采样得到绝缘子分割图。
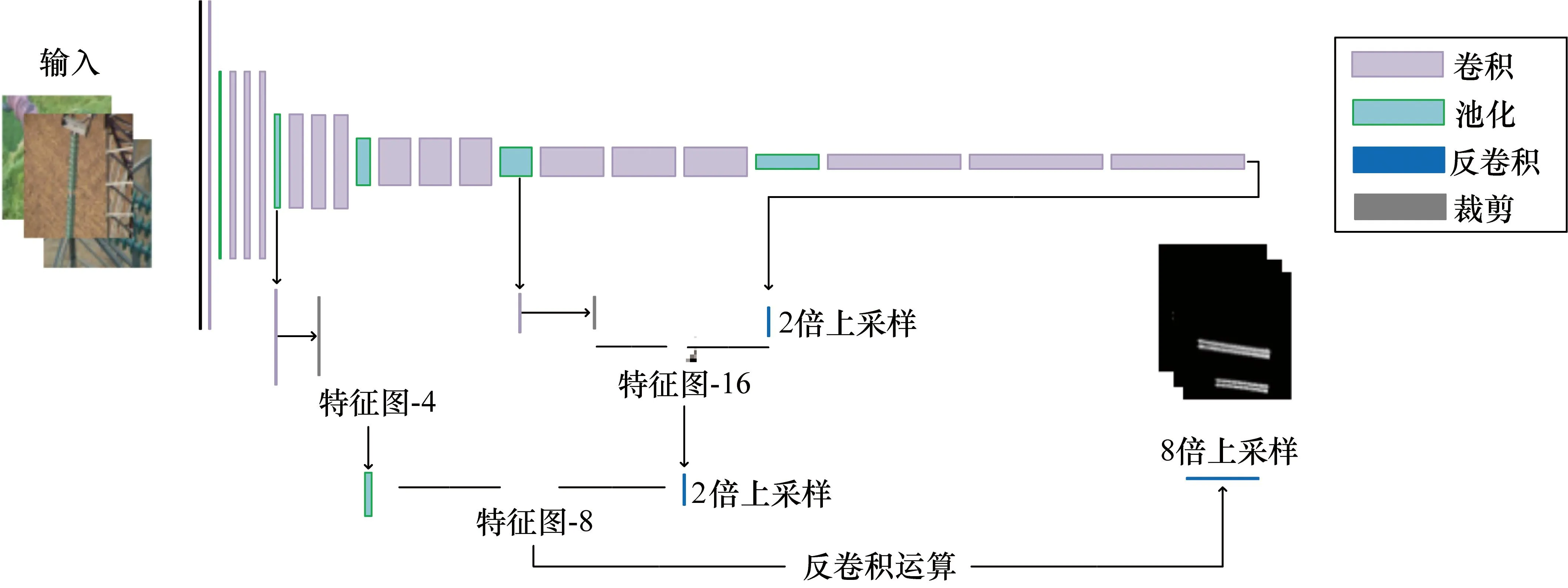
图3 改进的FCN网络运算示意图
1.5 单个绝缘子质心位置求解
连通域标记能够将每个绝缘子单独作为一个对象进行标记,然后对标记后的单个绝缘子进行颜色阈值分割,如图4(a)所示。颜色阈值是对图像的3个通道分别设定上限阈值和下限阈值进行分割,然后再对分割后的单个绝缘子进行尺度不变特征变换(Scale-Invariant Feature Transform,SIFT)角点检测。SIFT角点检测主要是对图像的局部明显特征进行描述,具有尺度不变的特征,该算法的特点主要有以下4个方面:① 具有较强的稳定性和适应性,角点检测的效果不受图像大小、亮度和视角的变化;② 具有区分性强的特点,能够在大量数据特征点匹配到区分性强的特定数据;③ 具有匹配速度快的特点;④ 扩展性强,能够结合其他特征向量。本研究中选择单个绝缘子检测的特征点数量为20,在进行SIFT角点检测后,对单个绝缘子图像使用K-means聚类算法求解质心坐标。K-means聚类的原理是:给定一系列数据样本X={X1,X2,…,Xn},样本每个元素具有N个维度的特征,其核心是将N个元素根据元素间的相似度归类到某个质心。具体步骤为:先对聚类簇心进行初始化C={C1,C2,…,Ck},1≤k≤n;然后通过欧氏距离计算每个元素到每个质心的距离,如式(3)所示。K-means聚类算法处理后的效果如图4(b)所示。
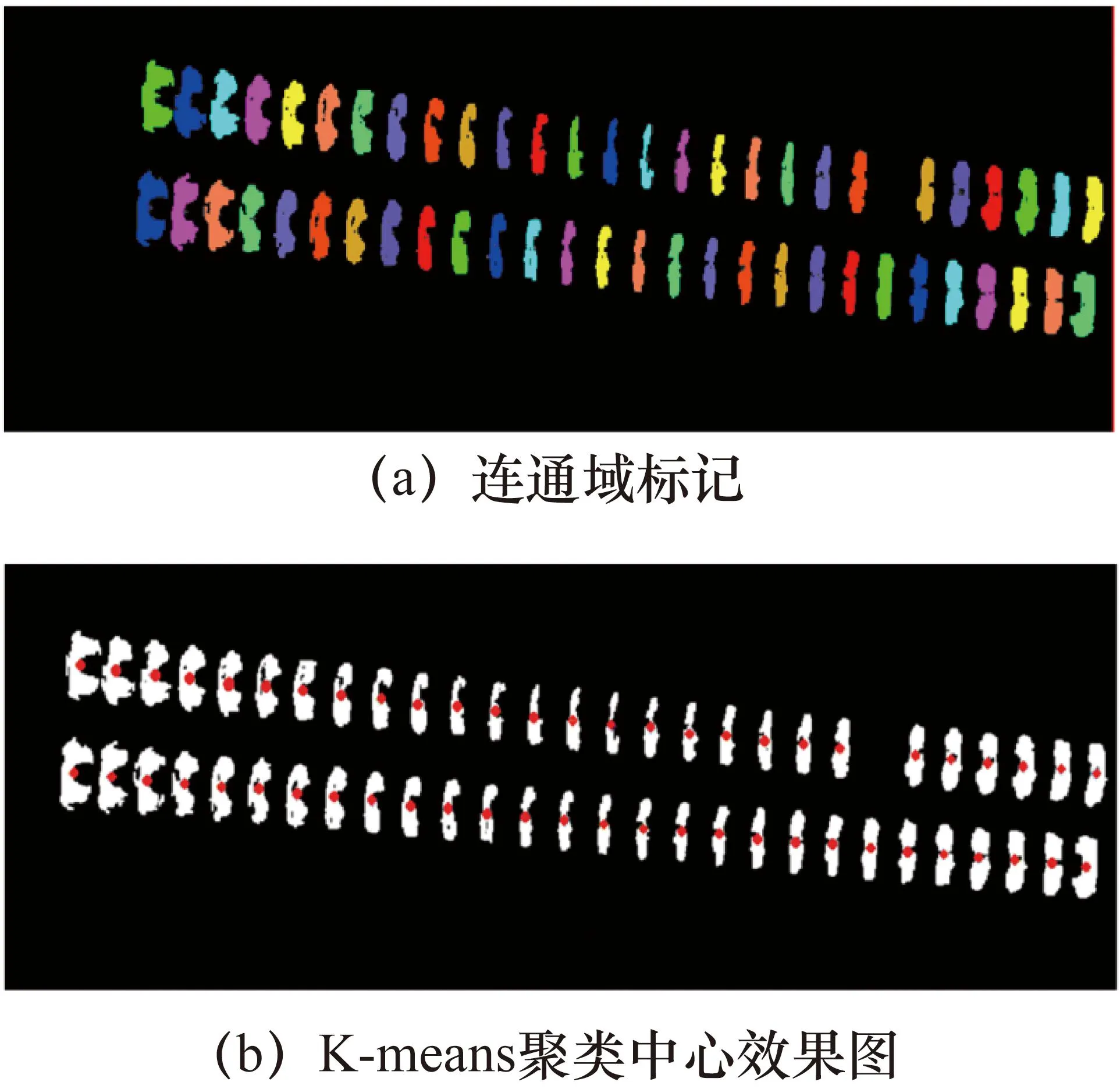
图4 绝缘子质心求解效果图
(3)
式中:Xi为第i个元素,1≤i≤n;Cj为第j个质心,1≤j≤k;Xit为第i个元素的第t个属性,1≤t≤m;Cjt为第j个质心的第t个属性。接下来对比每一个元素与簇心的距离,从而得到K个质心{S1,S2,…,Sk}。K-means质心表示簇心内的元素在某个维度的均值,计算公式如下:
(4)
1.6 绝缘子机械故障定位模型建立
为了对光伏电站绝缘子机械故障位置进行定位,根据光伏电站绝缘子的轮廓特征建立绝缘子机械故障定位模型,如图5 所示。首先使用改进的全卷积网络对绝缘子目标进行识别,并进行连通域标记,再进行颜色阈值分割和SIFT角点检测,最后将SIFT角点检测后的数据进行K-means聚类得到簇心位置坐标,设第1排第1个绝缘子的质心坐标为(X1,Y1),因此第1排第3个绝缘子的质心为[X1+2×D,W(X1+2×D)+b],其中D为相邻绝缘子的间距,最后根据等距质心定位绝缘子机械故障位置。

图5 绝缘子几何故障定位模型
2 结果与分析
2.1 模型训练结果与分析
2.1.1 实验环境与数据集
改进的FCN网络模型在操作系统Linux下搭建的PyTorch1.7环境下运行,硬件环境为AMD Athlon(tm) X2 Dual Core Processor LS-5810,GPU内存为24 GB。将采集的400幅光伏电站绝缘子图像按照1∶4的比例进行验证集和训练集的划分,320幅作为训练集,80幅作为验证集。本文的实验图像受到来自不同的光照角度的影响,为了提高改进的FCN网络对光伏电站绝缘子图像细节特征分割的准确性,在模型训练前对光伏电站绝缘子图像的干扰颗粒噪声进行处理,然后采用非线性运算对图像的亮度进行均匀化。
2.1.2 参数设置和评价标准
本研究采用均匀分布方式对权重系数进行初始化,权重参数的优化方式采用随机梯度下降法。学习率值为2×10-3,指数衰减的速度为0.94。网络模型每次迭代的样本数batch_size为24,训练epoch取值100。
光伏电站绝缘子分割模型的训练效果使用精确率、召回率和F1 Score值进行描述,如式(5)所示。
(5)
式中:TP为模型预测正类的正样本;FP为模型预测正类的负样本;P为精确率;R为召回率;F1为综合评价指标。
F1 Score区间为[0,1],用来评估光伏电站绝缘子模型的综合性能,F1 Score越大,分割效果越精确。光伏电站绝缘子分割的准确率越低,绝缘子像素分割的效果越差,如果召回率越小,表示光伏电站绝缘子部分像素区域未被正确分割,绝缘子分割模型训练过程的损失率和准确率如图6所示。

图6 损失率和准确率曲线
2.1.3 实验对比
为了对本研究中改进后的FCN模型的分割性能进行有效性验证,与传统FCN网络进行实验对比,部分实验效果如图7所示。从图7中能够看出光伏电站绝缘子分割存在误分割现象,绝缘子分割的轮廓边界效果较差。改进后FCN网络对光伏电站绝缘子分割的效果良好,分割后的绝缘子轮廓较光滑。改进前后的分割模型指标对比如表1所示,能够看出在精确率、召回率和F1 Score模型指标方面,改进后的FCN网络均优于传统FCN网络。

表1 改进前后的分割模型指标对比
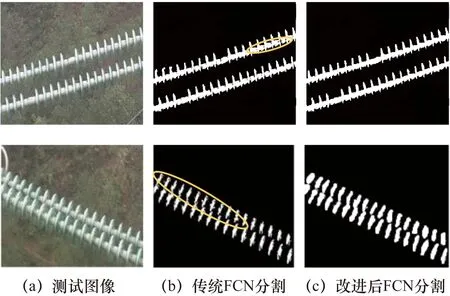
图7 传统FCN与改进后FCN分割效果对比图
2.2 绝缘子机械故障定位结果与分析
为了对本研究的机械故障定位算法进行有效性验证,通过人工测量的方式对无人机抓拍的光伏电站绝缘子图像进行缺陷机械故障定位坐标的获取,在本次实验中,分别对大雾天气和光照不均的条件下采集的绝缘子图像进行故障定位,并对绝缘子图像进行亮度的修正,以适应不同的光照图像,提高模型训练的泛化性,然后将绝缘子图像压缩成700像素×900像素,经人工计算采集的每幅图像中绝缘子像素范围为2 500~3 500,然后计算每幅图像中绝缘子聚类的簇心坐标,并计算出相邻绝缘子簇心的距离,最后将相邻的绝缘子簇心距离相加并去掉计算得到的最短距离和最长距离,如式(6)所示。根据相邻绝缘子簇心的平均距离计算出绝缘子故障位置,在1.6节中进行了详细介绍。
(6)
式中:A为绝缘子簇心间的平均距离;xi,yi为绝缘子聚类中心坐标;n为连通域标记的绝缘子个数;maxd和mind分别为相邻绝缘子簇心的最长和最短距离。
部分测试图像结果数据如图8所示,能够得出在大雾天气条件下人工测得的实际机械故障位置与算法检测到的故障位置距离范围为14像素~27像素。在光照不均的条件下测得的实际故障位置与算法检测到的故障位置距离范围为12像素~22像素。经过分析,光照不均条件下故障位置定位效果最佳,机械故障位置定位成功。
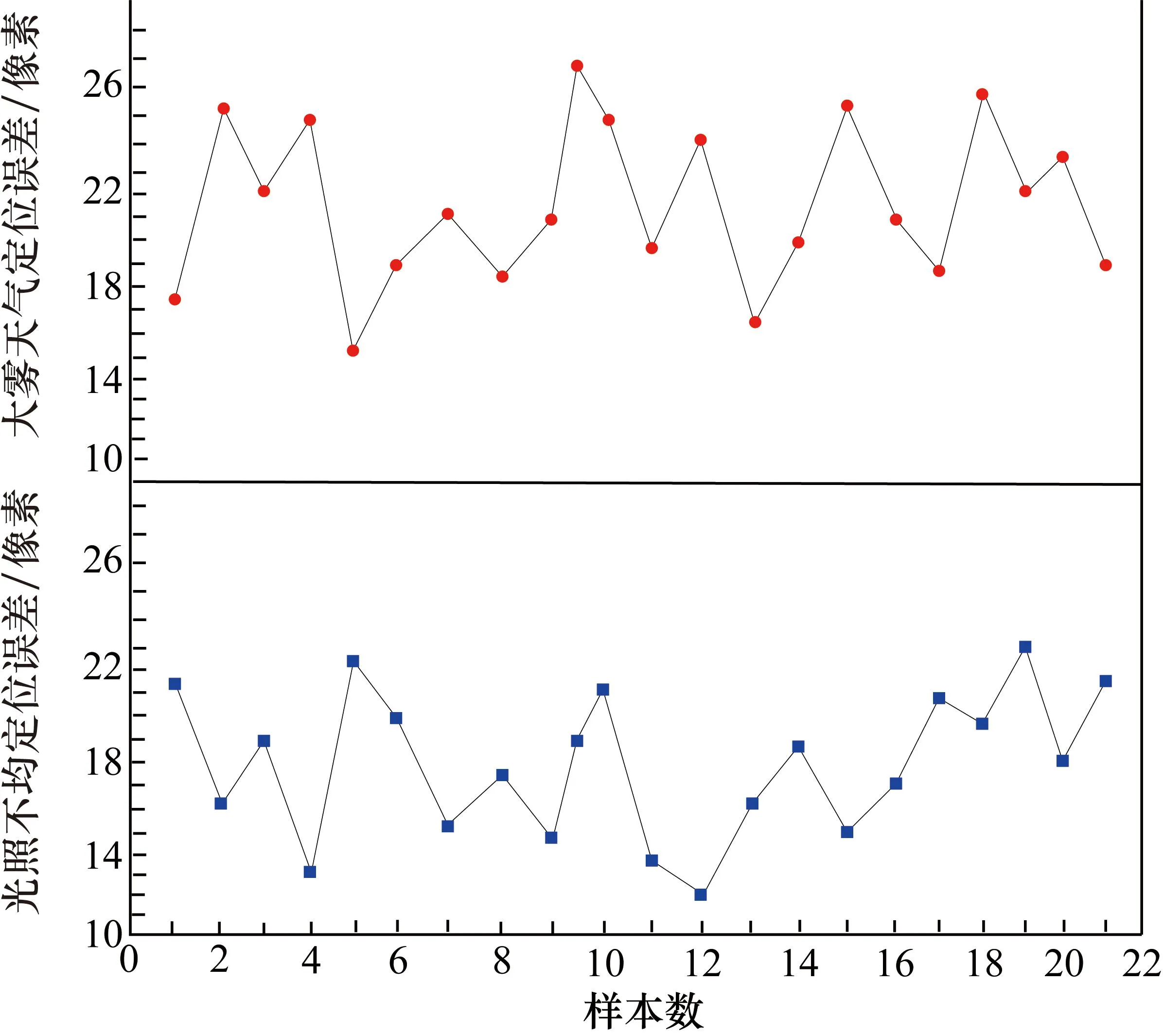
图8 分割算法的有效性分析
将绝缘子做最小外接椭圆,算法定位机械故障位置与人工定位的故障位置X坐标相差不超过椭圆的短轴像素距离、Y坐标相差不超过椭圆的长轴像素距离定义为定位成功,反之定义为定位失败,测试图像如图9所示。对大雾天气和光照不均的条件下采集的共400幅图像进行了时间复杂度分析,平均定位时间为0.071 s,具体情况如表2所示。定位失败的原因主要是由于绝缘子轮廓受到复杂背景的遮挡,比如线缆和电塔钢架等,聚类的簇心位置偏移造成了相邻绝缘子平均距离存在误差,如图10所示。

表2 不同采集条件下机械故障定位情况
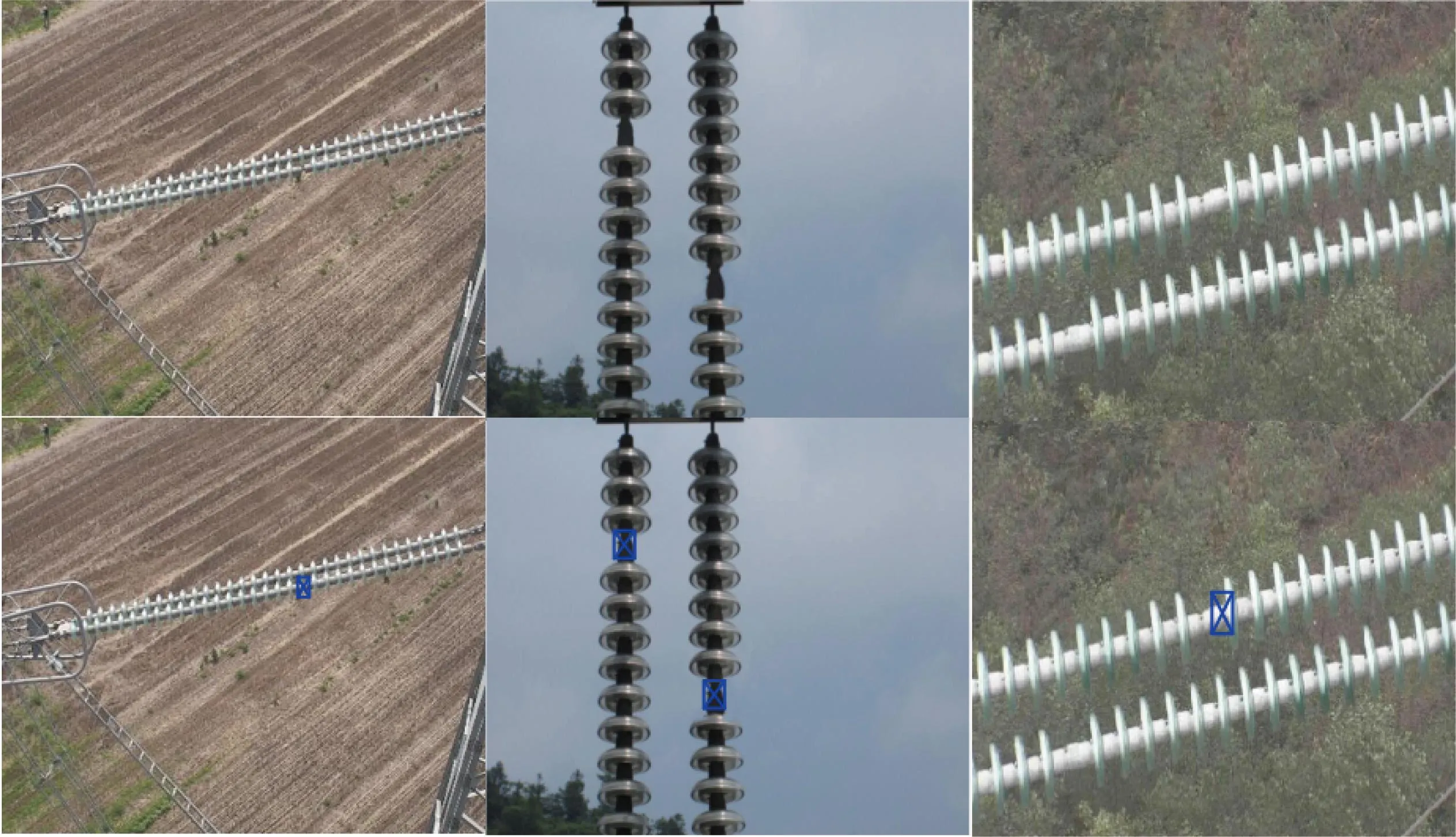
图9 背景单一的绝缘子测试图像

图10 背景复杂的绝缘子测试图像
3 结束语
本文提出了基于机器视觉的光伏电站绝缘子机械故障检测方法,实现了绝缘子机械故障检测的准确定位。试验数据表明:
① 基于改进的FCN网络对绝缘子图像进行分割,与传统FCN网络进行对比研究,可知改进FCN网络对绝缘子图像分割效果最佳,F1 Score值为96.86%,算法消耗时间为0.056 s。
② 本文提出了基于机器视觉的光伏电站绝缘子机械故障检测的方法,然后对400幅测试图像进行验证,平均定位误差为18像素,大雾天气和光照不均情况下检测成功率分别为82.5%、96%,算法运行时间为0.066~0.076 s,可以满足光伏电站绝缘子机械故障定位的准确性和实时性要求。
在光伏电站绝缘子机械故障定位的研究过程中,存在大雾天气条件下部分绝缘子轮廓被遮挡的情况,在今后的绝缘子机械故障定位研究中,将对以上情况进行深入研究。
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
山东工业技术(2016年15期)2016-12-01
工业设计(2016年12期)2016-04-16
电力建设(2015年2期)2015-07-12
电测与仪表(2014年6期)2014-04-04
电气传动自动化(2014年6期)2014-03-20
航天器工程(2014年5期)2014-03-11
振动工程学报(2014年2期)2014-03-01