基于DOBC的多智能体系统一致性协议设计与分析
2023-12-13 08:04:54于淑莉沈庆成
扬州大学学报(自然科学版) 2023年5期
于淑莉, 王 芹*, 裔 扬, 沈庆成
(1. 扬州大学信息工程学院, 江苏 扬州 225127; 2. 江苏庆亚电子科技有限公司, 江苏 徐州 221000)
多智能体系统是由多个智能体通过网络互联构成的群体系统, 其目标是让多个智能体通过相互协作完成单个智能体无法完成的大量且复杂的工作[1-2].近年来, 多智能体系统已被广泛用于无人机编队、交通控制、工业自动化和社交网络等领域[3-6].作为多智能体协同的重要问题之一, 多智能体一致性问题受到极大的关注.Xie等[7]探讨了在执行器饱和情况下高阶多智能体的全局最优一致性控制; Li等[8]利用事件触发实现了多智能体的一致性控制; Deng等[9]提出采用分布式动态输出反馈协议处理干扰所致不一致性问题; Wang等[10]研究了固定和切换拓扑下具有干扰和模型不确定性的多智能体一致性问题.在多智能体系统工作过程中,其控制通道面临的扰动和故障等会影响系统达到一致性.基于干扰观测器的控制(disturbance observer based control, DOBC)算法[11-12]主要由反馈控制器和前馈补偿控制器组成, 相较于被动抗干扰控制(passive anti-disturbance control, PADC), DOBC可以有效消除干扰对系统性能的影响, 且无须牺牲系统的标称性能.本文拟利用DOBC处理多智能体系统中的干扰以保证各子系统的动态性能, 并设计基于DOBC的一致性协议, 以期在各子系统扰动补偿的基础上满足多智能体系统的一致性要求.
1 预备知识
假设n个节点的权重连接图以G=(V,E)表示, 其中节点的集合V={v1,v2,…,vn}, 边的集合E={(vi,vj)∈V×V|vj∈Ni},Ni={vj∈V|(vi,vj)∈E}为节点vi的邻居集合,i,j=1,2,…,n.当vj∈Ni时, 节点vi与节点vj的连接权重aij>0, 否则aij=0.若aij=aji, 则图G为无向拓扑图.

2 问题描述
考虑含n个智能体的多智能体系统, 每个智能体的控制输入端均带有未知输入扰动, 其状态空间描述如下:
(1)
其中xi(t)∈Rs,ui(t)∈Rp,yi(t)∈Rq分别为第i个智能体的状态变量、输入变量和输出变量;di(t)∈Rp为第i个智能体输入端受到的未知扰动;A∈Rn×s,B∈Rn×p,C∈Rq×n均为常数矩阵.
定义1(一致性问题) 对于多智能体系统(1), 设计分布式控制律使得系统保持稳定且n个智能体的状态在时间趋于无穷时达到一致, 即
limt→∞‖xi(t)-xj(t)‖=0,∀i=1,2,…,n,j∈Ni.
(2)
定义边向量
xij=xi-xj,
(3)
由于本文使用的是无向拓扑图, 所以有xij=-xji.
本文考虑具有未知输入扰动的多智能体系统一致性问题, 故待解决的控制问题是: 在输入具有未知扰动的情况下, 构建一个分布式控制律ui(t)∈Rp, 使得从任意初始位置ri(0)∈Rp出发的智能体都能趋于一致.
3 一致性协议设计
假设干扰是由线性外部干扰系统
(4)
产生的, 其中wi(t)为外部干扰系统的状态,W,V为设计的系统矩阵.
为了解决由外界环境产生的干扰, 在所有智能体状态可知的前提下, 为i个智能体设计如下干扰观测器:
(5)

令估计误差
(6)
由式(1)(4)(5)可知
(7)
令
(8)
则
(9)
其中In为n×n的单位矩阵.
假设所有系统变量都是可测的, 基于扰动观测器设计如下控制器:
(10)
式中ki为控制器增益.
4 稳定性分析

(11)

证明 根据式(1)(5)(10)可推导出系统状态方程
(12)
将式(12)写为紧凑格式:
(13)
引入一致性误差[13]
η(t)=x(t)-((1rT)⊗In)x(t),
(14)

当状态一致性误差趋于0时, 称多智能体系统已达到一致性, 则可推导出状态一致性误差系统
(15)
选取Lyapunov函数
(16)
根据式(9)(15),可求得
(17)
(18)
5 数值仿真
考虑一个由4个智能体组成的多智能体系统, 其网络通信拓扑结构如图1所示.由图1可见, 网络通信拓扑图是连通的.
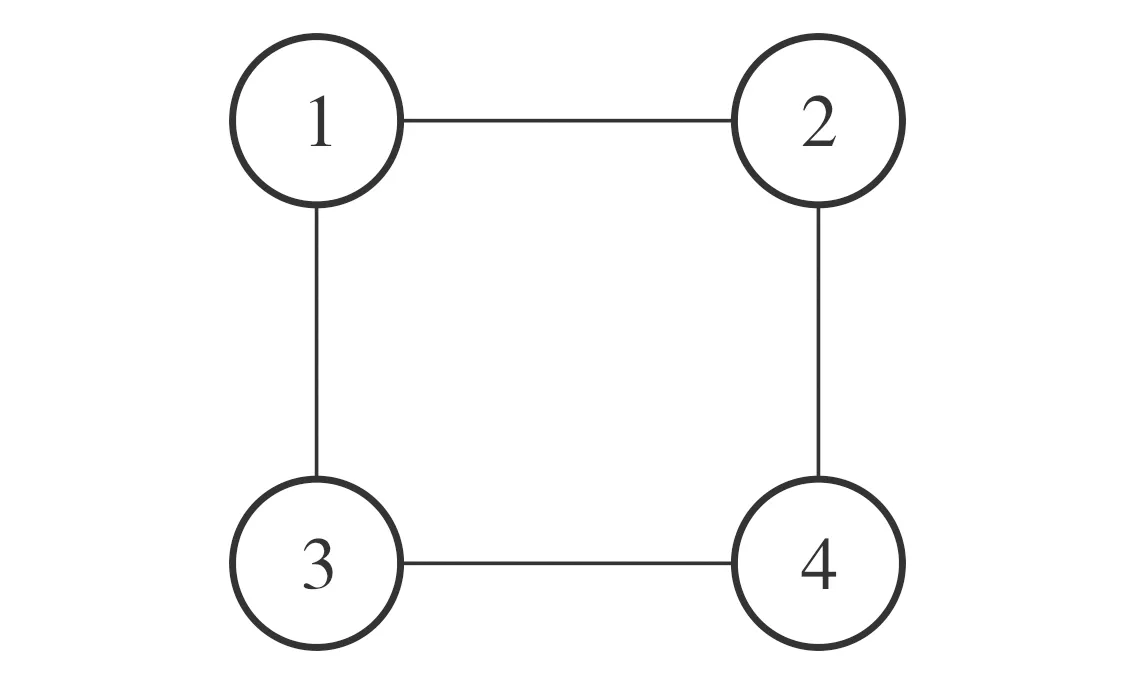
图1 通信拓扑图
(19)
设置干扰系统的参数
(20)


图2 扰动估计误差
4个智能体的状态轨迹如图3所示.由图3可知,在控制律(11)作用下, 系统(1)中各智能体的状态最终可达一致.

图3 状态轨迹图
综上, 本文设计的基于扰动观测器的分布式一致性控制算法可使多智能体系统(1)稳定且达到一致性的目标.
6 结语
本文针对具有未知输入扰动的多智能体系统设计了一种基于扰动观测器的一致性协议.基于干扰前馈补偿设计了分布式复合控制律, 并利用线性矩阵不等式理论和代数图论得到多智能体一致性问题的充分条件.数值仿真结果验证了所提控制算法的有效性.
猜你喜欢
电子设计工程(2023年2期)2023-01-24 12:52:12
数学物理学报(2022年4期)2022-08-22 04:06:36
数学年刊A辑(中文版)(2022年1期)2022-08-20 08:50:22
华东师范大学学报(自然科学版)(2020年1期)2020-03-16 03:14:55
数学物理学报(2019年4期)2019-10-10 02:38:56
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电源技术(2015年11期)2015-08-22 08:50:38
电测与仪表(2015年19期)2015-04-09 11:32:56