
仿生机械鱼结构设计与仿真分析
2023-12-09 02:45:40吴晓艳马雪婷顾志鹏黄菲郑宇
机械工程师 2023年11期
吴晓艳,马雪婷,顾志鹏,黄菲,郑宇
(宿迁学院 机电工程学院,江苏 宿迁 223800)
0 引言
仿生学指的是通过研究自然界生物的特征,结合实践中亟待解决的问题,构建数字、科学模型的行为。从功能上看,其将机器与生物进行了有机联合,并且使各项系统实现了沟通。仿生学有着鲜明的跨学科特点,如生命科学、机械工程等诸多技术领域,其对不同原理技术的糅合运用给水下航行装置的优化设计和发展带来了很大帮助,而机器人学也在其帮助下飞速发展[1-2]。
由于其特殊的身体构造,鱼类能够在深海中自由的遨游,不仅消耗能量低,而且基本上不会发出任何噪声,十分契合人们对水下作业机器人的要求[3-4]。仿生机械鱼作为一种新型水下机器人, 具有能源利用率高、速度快、机动性强、噪声低、对环境扰动小等优势,可以适应复杂环境和高效作业等要求所带来的挑战, 因而得到了广泛的研究与开发[5-7]。
由于鲹科鱼具有高度的机动性和稳定性,本文对其开展仿生研究,在了解其游动原理的基础上,设计相关实验装置,然后进行适当优化,实现仿生运动。
1 仿生机械鱼推进模式设计
仿生机械鱼的游动速度与推动方法一般分为喷射型推动、躯体和尾鳍摆动、中央鳍/对鳍摆动和身体波动等4种形式[1]。鲹科鱼类运动方式为躯体和尾鳍摆动(Body and/or caudal fin propulsion,BCF) 模式,这种运动方式具有高速、高效和高机动性等优势。因此,本文选择BCF模式为仿生机械鱼的推进模型。
2 机械鱼机械结构模型设计
2.1 仿生机械鱼整体结构设计
本文的仿生机械鱼以模仿自然界鲹科鱼类的外形为基础,鲹科鱼整体呈纺锤形,具有显著的流线型特征。由于仿生机械鱼内部需要预留一定的舵机和电路空间,鱼身宽度比真鱼有所增加。为使仿生机械鱼外形更加流畅,本文将仿生机械鱼结构划分成3个部位分别进行设计,并确定各截面尺寸,如图1所示。仿生机械鱼由鱼头、鱼身和鱼尾3部分组成,整体长度约为570 mm,宽度约为120 mm。对于本文设计的仿生机械鱼结构,如果长度过短(小于400 mm),则无法容纳驱动机构和电路,后续也缺少扩展功能的空间;如果长度过长(大于800 mm),则需要强力的驱动机构及充足的电池容量,体积和质量巨大,可用的扩展空间过大而冗余,仅适合大型科研机构的需求;所以,鱼体长度在500~600 mm之间较为合理。

图1 鲹科鱼形貌与仿生机械鱼整体结构
2.2 仿生机械鱼头部模型设计
仿生机械鱼头外形设计为导弹状头形(如图2),该外形设计能够减小仿生机械鱼游动时的阻力。仿生机械鱼头结构可拆卸更换,鱼头内部空间可用于扩展功能,如根据不同工程作业需要,安装水下摄像头、探照灯、夹钳、避
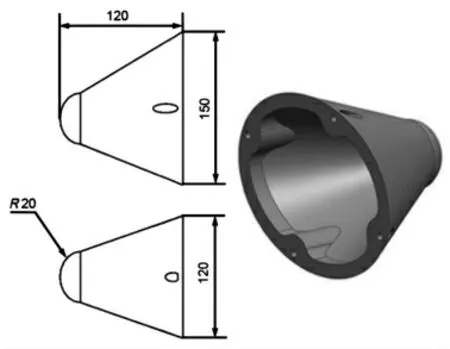
图2 仿生机械鱼鱼头结构
障传感器、水质传感器等装置,切去鱼嘴部分可以安装运动相机。鱼头和鱼身用4颗5 mm黄铜螺钉连接,加O形环密封防水。
2.3 仿生机械鱼鱼身及内部模型设计
仿生机械鱼鱼身整体为空心椭圆筒型(如图3)。后端盖凹陷处安装第一尾鳍舵机A,端盖用螺钉和密封圈安装在鱼体后端。仿生机械鱼内部动力部分由3个双轴舵机ABC串联组成(如图4),A负责转向,B、C负责摆动前进,每个舵机最小偏转单位为5°,通常为15°,最大为30°,三轴总角度15°~90°,同时具备直线运动、左转弯、右转弯和急停等运动状态。

图3 仿生机械鱼鱼身结构

图4 仿生机械鱼内部结构
仿生机械鱼鱼身下部为开放空间,前端左右两侧各设置一个胸鳍L和R,舵机和胸鳍设置在鱼身外部(如图4)。鱼腹底部外加整形罩(如图5),可遮蔽胸鳍舵机和配重块,并修饰鱼体形状恢复至流线型,进而减少乱流和游动阻力。鱼头和鱼身占仿生机械鱼长度的一半左右,既保证足够的预留空间,又保证整体的刚度,即摆动前进时头部不容易左右晃动,类似背鳍和腹鳍的稳定作用。

图5 整形罩结构图
2.4 仿生机械鱼尾部模型设计
尾鳍是仿生机械鱼结构的动力部件,该尾鳍结构整体呈波浪及交叉形状,上下方向的开叉有助于引导水流,减小游动阻力,后部的凹陷有助于卡门涡街的形成,具有较好的流体动力学性能。仿生机械鱼鱼尾长度为270 mm,截面为190 mm×120 mm的椭圆结构(如图6)。尾鳍与鱼身的连接方式为无螺钉柔性连接。

图6 仿生机械鱼尾部结构图
3 仿生机械鱼运动学分析
3.1 运动学分析
卡门涡街是流线动力学基础中至关重要的问题,当某种情况下的特定常来流绕过特定障碍物后,障碍物两侧会周期性地剥离出转动方位相反、排列规律一致的双列线涡。而鲹科鱼在游动过程中也会在身后发生尾部漩涡,但由于其方位和卡门涡街方位相反,被称之为反卡门涡街。鱼类利用这些涡流前进,尾鳍力量越大,涡流的强度越高。其大小可由特劳哈尔数表示:
式中:f为尾鳍摆动频率,ATmax为尾流宽度,U为鱼体的平均游速。
反卡门涡街大小与鱼体尾部摆动频率及尾流宽度成正比,与游动速度成反比。
3.2 鱼体波方程
鱼物质波是指一种由鱼体头部传播至尾鳍处的行波,传播过程中其波幅逐渐增大。该曲线方程可描述为
式中:ybody为鱼体横向位移(波幅);x为其轴向位移;k为鱼体波的波长倍数,k=2π/T;c1、c2分别为波幅包络线的线性项、二次项系数;ω为鱼体波频率。
通过对仿生机械鱼的波动方程进行Matlab仿真,得到的波动曲线如图7所示。左胸鳍和右胸鳍保持水平状态,尾鳍左右摆动,仿生机械鱼即可保持常速直线游动状态(如图8)。此外,左胸鳍右胸鳍同幅度上下摆动,可以对鱼体进行加速。由于该尾鳍形状展弦比较大,因此其产生的推动力也比其他尾鳍更大,效率更高。

图7 Matlab离散化后的鱼体波图形

图8 不同转向的鱼体波图形
4 仿真分析
本文通过ANSYS 软件对仿生机械鱼的游动性能进行模拟分析,首先将仿生机械鱼导入到ANSYS软件中,设置流体的进口、出口和四壁,并进行网格划分。本文对游动过程中鱼鳍能达到的最大摆动幅度角30°以及急停时的摆幅角90°两种极限条件进行模拟分析,分析结果如图9所示。

图9 不同角度下的流域场分析
由分析结果可以得知,鱼鳍前端受水流冲击力最大,往后逐渐递减,但由于前端受力面积较小,所以其产生的阻力也较小,因而在游动时更加高效。此外,尾鳍的面积和仿生机械鱼游动阻力成正比,本文参照实际鱼类尾鳍设计了仿生机械鱼的尾鳍结构,展弦比为11.08,可以实现较好的推进效果。
5 结论
本文主要阐述了这种全新的以BCF 模式为驱动力的三节式仿生机械鱼,并通过Matlab软件和ANSYS软件对该仿生结构进行仿真模拟分析,确定了该结构的稳定性和高效性。得出如下结论:
1)以鲹科鱼类外形为仿生模板,设计出仿生机械鱼结构模型并对其开展仿真分析,结构表明,该仿生机械鱼具有良好的游速和机动性。
2)通过两个舵机分别控制仿生机械鱼的左右胸鳍,使用3个舵机控制其尾鳍摆动角度。该装置具备直线运动、左转弯、右转弯和急停等运动状态。
3)仿生机械鱼鱼体为仿生流线型,游动阻力较小。相比于常用的复杂轴密封结构,该装置具有架构简单、拆装方便、伸缩自如及检修便利等优点。仿生机械鱼鱼体内部预留空间,可对其内置设施进行拓展,增强其使用价值。
4)通过仿真分析进一步研究了仿生机械鱼在特定条件下受到水流冲击力时的作用反馈,验证该结构的高效率和高推动力。
猜你喜欢
水下无人系统学报(2024年1期)2024-03-14 03:42:28
苏州科技大学学报(工程技术版)(2023年3期)2023-11-02 08:27:58
包装工程(2023年18期)2023-09-27 09:18:38
散文诗世界(2022年3期)2022-03-21 13:37:36
南方农业学报(2020年7期)2020-11-09 03:09:31
养生保健指南(2017年8期)2017-12-09 18:45:31
船舶力学(2017年5期)2017-06-05 14:14:11
科学Fans(2017年3期)2017-04-13 07:32:13
微特电机(2016年8期)2016-11-26 08:16:49
特别健康·上半月(2016年6期)2016-10-21 19:13:58
