
枸杞采收机振动采收机理分析
2023-12-07 07:35范开欣马晨伟
林业机械与木工设备 2023年10期
刘 英, 范开欣, 马晨伟
(1.甘肃畜牧工程职业技术学院,甘肃 武威 733006;2.甘肃农业大学机电工程学院,甘肃 兰州 730070)
枸杞,隶属于茄科枸杞属,别名又为枸杞子、甜菜子、血杞子等,是一种具有高营养价值和经济价值的多年生多棘刺灌木植物[1-3],其化学成分主要包括苯酞内酯类、有机酸类、多糖、氨基酸和核苷类等成分,具有抗氧化、延衰抗老、抗血小板聚集、抗肿瘤、保肝等多种保健功效[4-7]。
目前枸杞采摘方式仍为传统的人工采摘,不仅费时费力,且效率低下,成本高昂,这严重影响着枸杞产业的健康可持续发展[8]。因此,研发高效低损伤的枸杞采摘机械,已成为枸杞产业未来发展亟待解决的问题。顶生小林果实现全程机械化式采收较为困难,国内学者也对小林果机械化采收进行了大量研究。王克奇[9]等设计了一种击打式松果采摘机器人,通过电机驱动采摘模块并相互配合完成采摘作业,采用Matlab软件的仿真运动学模型求解出了机械臂的工作空间范围,配合Ansys Workbench软件对采摘机器人的各部件进行了优化分析,避免了松果人工采摘过程中存在的安全问题。陈燕[10]等通过对荔枝果实植株的生长特性研究,设计了一种荔枝单果采摘机,该机器的动力源采用气动的方式,将伸缩机构设计到采摘机的剪切机构和移障机构中,实现了对不同高度荔枝果实的采摘作业。王毅[11]等根据柑橘果柄的生长状态,并与蛇嘴咬合机理相结合,提出了一种具有仿生特性的果实摘取终端执行器,并对该执行器进行了模拟分析,确保了该执行器的结构合理,从而实现了户外条件下对柑橘果实精确的摘取。郭艳玲[12]等通过探索蓝莓收获的振动特性研制出了一种蓝莓收获试验台,通过分析试验台结构参数对蓝莓植株振动响应的影响,得出了蓝莓植株的振动输出响应与指排振动装置频率、振幅、采摘平台行进速率之间的关系,并通过对蓝莓的收获实验得出能够达到收获要求的最优振动频率约为2 r/s,采摘机的最优行驶速率约为1 m/s,指排振动装置的最佳拍打角约为60°。
本研究通过对枸杞在采摘过程中的受力分析,确定影响振动机构的主要因素。并对挂果枝条的模态进行仿真分析,以确定振动采摘头振动机构的最佳参数。
1 枸杞果实采摘力分析
本研究设计的振动采摘头振动方式为在竖直方向上做往复式直线振动,枸杞果实发生受迫振动的形式可以简化为定点摆动的振动形式,果实主要受力形式为抗拉力。建立枸杞果实受力模型如图1所示。以正弦规律作为挂果枝条在振动过程中产生的位移输出响应,如式(1)所示:

图1 枸杞果实受力模型
f(t)=Asin(ωt+φ)·e-ζωt
(1)
式中:A-振幅,m;ω-振动角频率,rad/s;φ-初始相位角,rad;ξ-阻尼比。
对式(1)进行二阶导数求导运算可得:
f''(t)=A[ω2-(ζω)2]sin(ωt+φ)·e-ζωt
(2)
引入牛顿第二定律可得振动过程中作用在枸杞果实上的惯性力为:
F=mf''(t)=mA[ω2-(ζω)2]sin(ωt+φ)·e-ζωt
(3)
式中:F-振动产生的枸杞果实惯性力,N;m-枸杞果实质量,kg。
分析枸杞果实受力模型可得,当受迫振动产生的惯性力和果实自身重力在果柄方向的分力大于果柄连接力时,枸杞果实脱离挂果枝条,如式(4)所示:
Fn+G1>F拉
(4)
即:
Fcosα+Gcosα>F拉
(5)
式中:F拉-果柄连接力,N;α-重力与果柄连接力的夹角,rad。
联立式(4)和(5)可得:
m{A[ω2-(ξω)2]sin(ωt+φ)·e-ζωt+g}cosα>F拉
(6)
枸杞植株在实际生长过程中,挂果枝条几乎与地面保持垂直状态,重力与果柄连接力的夹角一般都比较小,因此可将cosα的值视为1,整理化简式(6)可得:
m{A[ω2-(ξω)2]sin(ωt+φ)·e-ζωt+g}>F拉
(7)
由式(7)分析可知,影响枸杞受迫振动过程中惯性力大小的主要因素为枸杞果实质量、振幅、振动角频率、受振时间以及阻尼比。振幅和振动的频率越大,产生的惯性力也就越大,但振幅和频率过大,会对枸杞植株和枸杞果实产生损伤,同样在振幅和频率确定的情况下,受振时间越长,振动的效果也就越好,但同时也会增加采摘机的能量消耗。当F惯性力>F拉力时,枸杞果实受振动作用脱落,在实际采收过程中应保持F熟果结合力>F惯性力>F青果结合力,方能达到采摘熟果保留青果的目的,同时不对后期晚熟枸杞的采摘造成影响。
2 挂果枝条频率的确定
2.1 有限元建模
根据枸杞植株生长形态可知,枸杞果树主杆上分布有2~3个次级枝条,根据挂果程度的不同,可将枸杞树枝条分为主干、一级枝条、二级枝条、三级枝条、下垂挂果枝条,一二三级枝条延树干向上生长,挂果枝条较为柔软,受枸杞果实重力整体呈下垂状态,其结构简图如图2所示。

图2 枸杞植株结构简图1.枸杞树主干;2.一级枝条;3.二级枝条;4.三级枝条;5.下垂挂果枝条;6.地面
枸杞植株振动采摘原理图如图3所示,根据枸杞植株结构简图,在SolidWorks软件中建立挂果枝条的三维模型,将其保存为Parasolid(*.x—t)格式,并在Ansys workbench 软件中建立模态分析项,将挂果枝条导入到workbench 模态分析选项中,进行挂果枝条模型材料的添加、网格划分、添加约束并创建运算算例,完成有限元模型建立[13-14]。

图3 振动采摘原理图
2.2 求解及后处理
在模态分析过程中主要对挂果枝条前50阶模态固有频率进行有限元仿真求解,考虑到高频振动对挂果枝条和枸杞果实均会造成损伤,因此选择小于25 Hz的固有频率进行分析求解,模态位移云图如图4所示,挂果枝条的固有频率如表1所示。

表1 挂果枝条前20阶固有频率

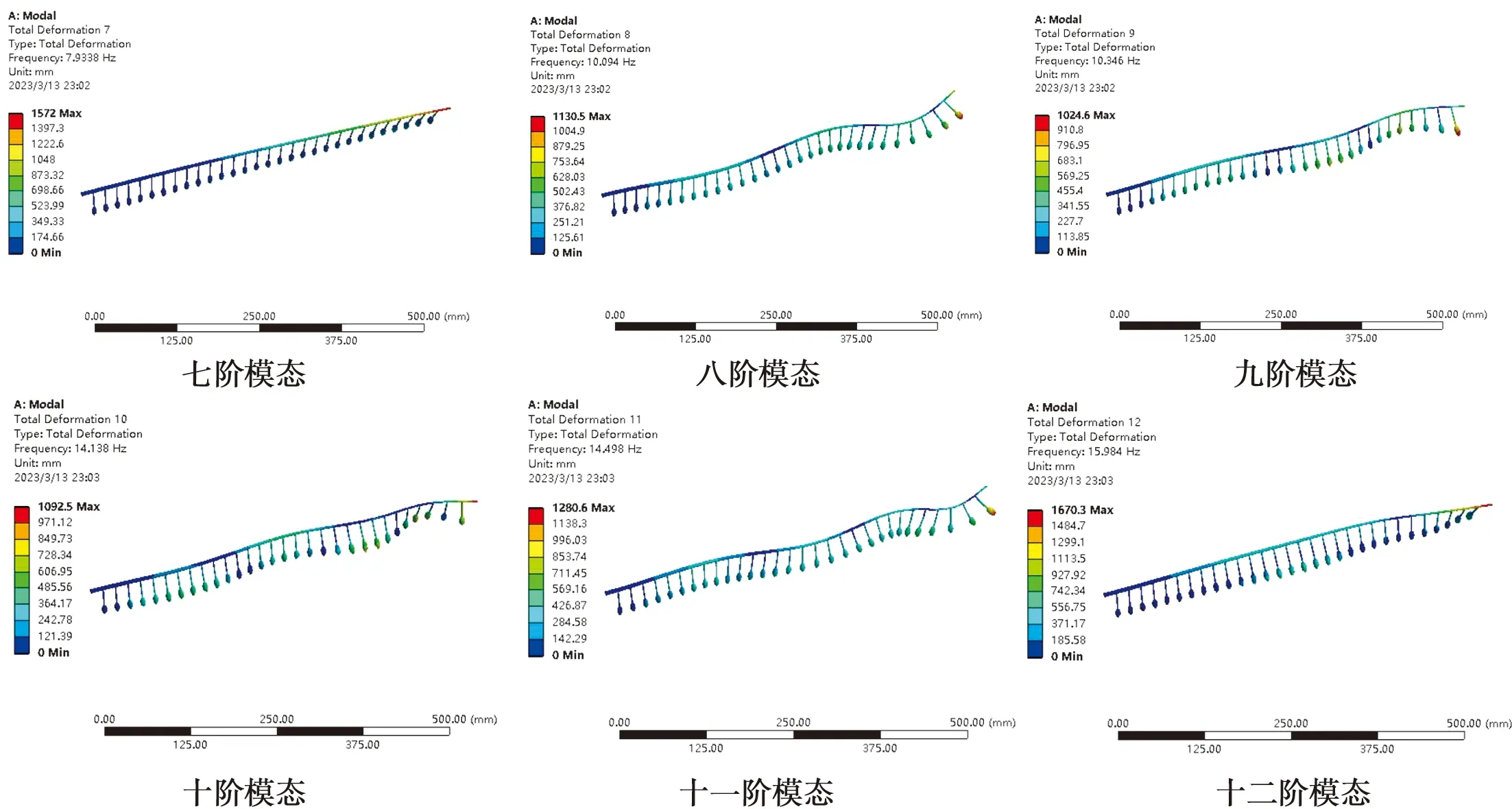

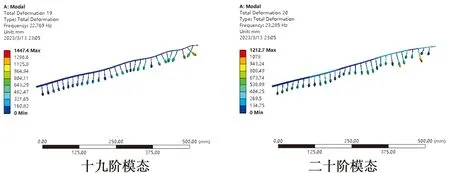
图4 挂果枝条模态云图
根据挂果枝条前20阶模态云图分析可知,在不同阶数振动频率下挂果枝条整体表现为弯曲变形,果柄和枸杞果实主要表现为扭转和摇摆晃动,枸杞果实在摇摆晃动的过程中还表现出相邻果实之间的碰撞现象。挂果枝条与果柄-果实之间在前七阶低频模态下主要表现为摆动运动状态,果柄-果实与挂果枝条之间的运动状态并不一致,且两者之间保持有较高的独立性,根据Spatz等[15]的相关研究也表明,果树分支在振动摆动过程中的运动形式与果树主干之间的运动形式并不是统一的,两者之间具有较高的独立性。在高频模态下,振动的形式主要表现为枸杞果树整体的振动,其中一二三级枝条在高频振动下产生的振型与挂果枝条在高频模态下产生的振型也各不相同,具有较大的差异性。结果表明挂果枝条固有频率在达到8阶10.094 Hz以上时,挂果枝条能产生有效振动,但当挂果枝条的固有频率超过11阶固有频率14.498 Hz时,模态振型显示挂果枝条会产生大幅度振动形式,在此频率下会对挂果枝条和枸杞果实产生振动损伤。
因此,能使挂果枝条产生有效振动的模态阶数范围为8~11阶模态,振动频率选择范围为10.094 ~14.498 Hz之间时可使振动效果达到最佳。
3 小结
(1)通过对枸杞采收机振动形式和枸杞在采摘过程中的受力进行分析,得出了影响枸杞受迫振动过程中决定惯性力大小的主要因素为枸杞果实质量、振幅、振动角频率、受振时间以及阻尼比;在实际采收过程中应保持F熟果结合力>F惯性力>F青果结合力,方能达到“采熟留青”的目的。
(2)通过对挂果枝条前二十阶模态固有频率仿真试验,得出能使挂果枝条产生有效振动的模态阶数范围为8~11阶模态,振动频率选择范围为10.094~14.498 Hz之间时可使振动效果达到最佳,且不会对枸杞果实和挂果枝条造成损伤。
猜你喜欢
新疆农业科学(2023年6期)2023-07-13
今日农业(2022年1期)2022-11-16
湖南农业科学(2022年5期)2022-06-22
锻压装备与制造技术(2021年2期)2021-07-19
农业与技术(2021年5期)2021-03-31
辽河(2020年8期)2020-09-02
中学物理·高中(2019年8期)2019-09-20
山东农业工程学院学报(2019年3期)2019-05-11
现代园艺(2018年3期)2018-02-10
浙江柑橘(2016年3期)2016-03-11
