
木建筑承重构件检测机器人夹持机构设计与分析
2023-12-07 07:35陈玉泽赵学林刘晓彤周玉成
林业机械与木工设备 2023年10期
刘 学, 陈玉泽, 赵学林, 刘晓彤, 周玉成
(山东建筑大学信息与电气工程学院,山东 济南 250101)
传统的高空作业方式存在效率低和高危险等问题,人们迫切希望能用机器代替工人完成高空作业[1-2]。机器人技术的快速发展使得攀爬机器人在建筑表面清洗[3]、路灯养护[4]、高压输电铁塔检修[5-6]和管道作业[7-8]等领域被广泛应用。攀爬机器人已成为热点研究领域之一[9]。
国内外学者针对攀爬机器人进行了研究。Lam等[10]研制了一种攀爬树木的机器人Treebot,如图1(a)所示。该机器人能够在不规则的树木上进行攀爬,全方位夹持器使其附着于不同直径的树木。鲍秀兰等[11]提出一种灯杆攀爬机器人,如图1(b)所示。夹持机构主要包括弹性卡爪和连接弹簧,弹性卡爪由机械手和机械手固定装置组成。上部和下部弹性卡爪分别固定于主、从动轮的两侧,利用主动轮和从动轮外缘尺寸的变化控制弹性卡爪交替夹紧,该机器人可以适应不同杆径。Gui等[12]设计了一种修剪树枝的攀爬机器人,如图1(c)所示。夹持机构主要由螺杆和车轮组成,通过电机驱动螺杆调节机器人车轮对树干的压力,该机器人适应不同直径的树木,但无法躲避障碍。李红双等[13]设计一种躲避障碍的攀爬机器人,主要由夹持机构、伸缩机构和避障机构等组成,如图1(d)所示。夹持机构包括舵机、机械爪、弧形手臂和同步带,通过舵机驱动同步带实现两个机械爪同时夹持。避障机构中的同步轮带动弧形手臂使其围绕被攀爬杆体运动,从而使机器人避开障碍物。Megalingam等[14]提出一种收割椰子的攀爬机器人Amaran,如图1(e)所示。Amaran夹持机构主要包括弹簧机构和麦克纳姆轮,利用弹簧的弹力实现对树木的夹持,机器人通过控制麦克纳姆轮的方向在椰树上攀爬和旋转。Liu等[15]提出一种爬杆和地面爬行机器人,如图1(f)所示。该机器人采用电机驱动方式实现多指持握和轮式运动,通过欠驱动保持机构和自适应控制器实现保持夹持自适应和攀爬稳定性。但上述攀爬机器人无法携带检测设备进行攀爬。

图1 攀爬机器人
本文提出一种能够搭载扫描设备对木建筑承重构件内部进行检测的攀爬机器人,通过夹持机构将机器人固定在木建筑承重构件上并支撑其上下运动。在攀爬和扫描过程中,夹持机构的稳定性保障攀爬机器人的工作性能。因此,根据攀爬机器人的工作要求对夹持机构进行设计并阐述工作原理,通过力学模拟研究夹持机构,然后对夹持机构进行有限元分析,最后实验验证夹持性能。
1 攀爬机器人及夹持机构设计
机器人在攀爬时所夹持木建筑承重构件的直径多变,传统夹持机构无法适应不同尺寸物体,需要一种适应性较强的夹持机械结构。
1.1 攀爬机器人总体结构
攀爬机器人由下体、连接体、上体和旋转扫描设备组成,如图2所示。为对木建筑承重构件进行360°扫描,需将其置于攀爬机器人的中轴线上,因此机器人的底座是一个圆形环绕结构,一端通过销轴连接,另一端可开合。底座下方安装万向轮,使机器人可以上下移动。上方的上体、下体和旋转体可拆分为2个半圆,上体和下体各有两对夹持机构。上体和下体之间的连接部分由三个间隔120°的垂直关节组成,在攀爬过程中起到提升作用,每个垂直关节安装位移传感器用于实时监测机器人上下体间距。为实现旋转体围绕被测物体360°旋转,由电机驱动旋转齿轮带动滑块沿着滑道运动。在旋转体上安装角位移传感器用于实时检测旋转角度,旋转体上方平板承载扫描设备。扫描设备位于旋转体上方,主要包括X射线发射器和X射线接收器,用于对被测物体进行扫描。机器人在攀爬过程中通过上体和下体交替夹持,夹持机构保障攀爬机器人的稳定性。

图2 攀爬机器人总体结构
1.2 夹持机构
木建筑承重构件所能承受的压力有限,为保护其内部结构,同时支撑旋转体360°旋转,本文采用两对相互垂直的夹持机构同时夹持,每对夹持机构有两个能够伸缩的水平关节,夹持机构如图3所示。每个夹持机构主要由蜗轮蜗杆、夹板、压力传感器和支撑杆组成。涡轮蜗杆传动具有结构紧凑、传动比大和自锁的特点。在夹紧过程中,若偶发断电意外,蜗杆不会因木建筑承重构件的反作用力而回退。为实时采集夹持力数据,在蜗杆的末端安装压力传感器。夹板通过螺栓与蜗杆连接,由于木建筑承重构件外表一般为圆柱形,将夹板设计成弧形以便能够紧密贴合。为防止夹板损伤木建筑承重构件表面和增大摩擦系数,在弧形夹板的接触面包裹一层硫化橡胶垫。支撑杆位于蜗杆的下方,一端连接弧形夹板的下方,另一端通过螺栓连接蜗杆的末端,支撑杆、蜗杆和弧形夹板构成三角形,提高夹持机构的稳定性。
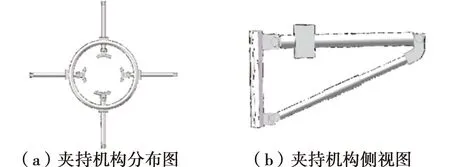
图3 夹持机构
夹持机构夹紧过程分两个阶段。在准备阶段,电机驱动蜗轮蜗杆向机器人中轴线方向运动。在运动过程中,根据蜗杆的进给距离微调电机速度,所有弧形夹板均与木建筑承重构件表面接触后,确保木建筑承重构件在机器人的中轴线上。在夹紧阶段,蜗杆继续带动弧形夹板以缓慢的速度向机器人中轴线方向运动。压力传感器实时检测夹持机构的夹持力,达到设定值后,电机停止运行。两对夹持机构的压力均达到设定值后,夹紧过程完成。
当夹持机构开始松开时,电机驱动蜗轮蜗杆向机器人中轴线反方向运动,位于环形空心钢架上的限位开关检测到弧形夹板,电机停止,两对夹持机构均回退到限定位置,放松过程完成。
2 夹持机构受力分析
为保证有效夹持木建筑承重构件,使攀爬机器人正常运行,本文对夹持机构进行静态力学分析。机器人夹持机构在攀爬过程中受到的作用力随着运动状态不断变化,本文以下体为例进行静力学分析,攀爬机器人下体有两对相互垂直的夹持机构。通过对机器人攀爬过程分析可知,当夹持机构抱紧木建筑承重构件时,各部件的受力达到最大,故对此进行受力分析。夹持机构的简化受力分析如图4所示(其中两个力未在图中表示)。

图4 夹持机构受力分析
根据力平衡条件和图4(a)可得:
(1)
式中,F1N、F2N、F3N、F4N为木建筑承重构件对机器人夹持机构的四个压力,f1、f2、f3和f4为夹持机构所受到的摩擦力,G为攀爬机器人受到重力,G0是G的四分之一。θ为木建筑承重构件与地面的夹角。
假设夹持机构与木建筑承重构件的摩擦系数为μ,为保证机器人在攀爬过程中不会下滑,根据摩擦定理,夹持机构摩擦力的取值范围为:
(2)
攀爬机器人的总体质量为150 kg,查得木材与橡胶的摩擦系数为μ=0.8[16],根据计算公式(3)可得机器人受到的重力为:
G=mg=150×9.8=1 470 N
(3)
夹持机构受到的摩擦力为:
f1=G0sinθ
(4)
当θ=90°时,攀爬机器人夹持机构受力分析如图4(b)。将θ带入公式(1)可得:
(5)
在理想条件下,f1、f2、f3和f4相等,摩擦力为367.5 N,为保证攀爬机器人对木建筑承重构件的稳定夹持,单夹持机构的夹持力应当大于或等于459.4 N。夹持机构选用的电机为无刷直流电机,额定功率为400 W,工作电压为220 V,额定转矩为2.6 N·m,最大转矩为5.2 N·m。该电机能够驱动夹持机构实现对木建筑承重构件的稳定夹持。
3 夹持机构有限元分析
为进一步验证夹持机构的性能,保证机器人在攀爬过程中安全可靠地工作,本文利用有限元分析软件对攀爬机器人夹持机构进行仿真分析。在SolidWorks软件中建立攀爬机器人夹持机构的三维模型,并将其导入ANSYS Workbench软件,定义模型的材料属性,设置机械接触关系并划分网格,然后对模型施加约束条件和受力情况,最后求解分析结果。攀爬机器人有支撑杆夹持机构的等效应力如图5所示。

图5 有支撑杆夹持机构等效应力分布
图5表明,在重力和夹持力的双重作用下,夹持机构受到的最大应力为13.188 MPa,位置位于支撑杆与蜗杆连接处,与实际情况相符。由于夹持机构对木建筑承重构件的压力来源于蜗轮蜗杆,夹持的过程中会受到来自木建筑承重构件的反作用力,其中一部分反作用力经过支撑杆作用于蜗杆末端,所以蜗杆末端的应力最大。夹持机构采用钢材料,最大应力远小于所用材料的许用应力,故本文所选取的材料和结构满足攀爬机器人设计的安全性能要求。为探究支撑杆对攀爬机器人夹持性能的影响,夹持机构在无支撑杆的情况下等效应力如图6所示。

图6 无支撑杆的夹持机构等效应力分布
图6表明,无支撑杆的夹持机构在重力和夹持力作用下,最大应力为15.826 MPa,与有支撑杆的夹持机构相比,该机构最大应力增加了2.638 MPa。最大应力位置在夹板与蜗杆的连接处,木建筑承重构件对于夹持机构的反作用力经过夹板传递到蜗杆的连接处,故该位置的应力最大。因此,夹持机构中的支撑杆能够有效地减小其最大应力,提高夹持机构的工作性能,保证机器人能够实现稳定攀爬和旋转扫描。夹持机构静力学仿真数据如表1所示。

表1 夹持机构静力学仿真数据
如表1所示,夹持力变化时,夹持机构所受的最大应力和最小应力也随之变化。夹持力达到最大值时,有支撑杆的夹持机构最小应力为1.056×10-3MPa,最大应力为13.188 MPa;无支撑杆的夹持机构最小应力为2.594×10-8MPa,最大应力为15.826 MPa。
如图7所示,随着夹持力不断增大,有支撑杆的夹持机构的最小应力始终大于无支撑杆的夹持机构的最小应力,但有支撑杆的夹持机构的最大应力始终小于无支撑杆的夹持机构的最大应力。经过上述分析计算,有支撑杆的夹持机构同无支撑杆夹持机构相比,机械结构更优。
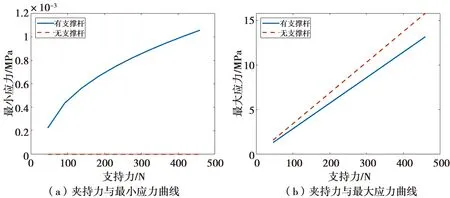
图7 夹持机构夹持力与应力曲线
4 实验与分析
根据前文分析并结合木建筑承重构件的特点,研制出攀爬机器人,总体质量为150 kg。攀爬的木构件直径为200 mm,高2 700 mm。夹持机构弧形表面的橡胶在保护木构件的同时增大摩擦力。图8是机器人在实验室环境中夹持和攀爬木构件的实验。

图8 样机攀爬实验
本文通过相关实验验证攀爬机器人夹持机构的机械结构和电机驱动能力。实验中,上体夹持机构夹紧木建筑承重构件时,下体夹持机构松开,连接体将下体稳定提升至指定高度。当下体夹持机构夹紧木建筑承重构件时,上体夹持机构松开,连接体将上体顶升至指定高度,实验结果满足攀爬机器人夹持性能要求。如图8所示,夹持机构的夹持力足够支撑机器人运动。此外,夹持机构可以控制水平关节的伸出距离适应直径在200~300 mm的木建筑承重构件。
5 结论
本文针对检测攀爬机器人设计一种夹持机构。对夹持机构进行受力分析和静力学仿真,从理论上证明了采用该夹持机构进行攀爬的可行性。最后在实验室环境下进行夹持实验,验证了有支撑杆的夹持机构性能更优。结果表明,该夹持机构具有良好的夹持能力和稳定性,能够适应不同直径的木建筑承重构件,满足机器人的攀爬要求。
猜你喜欢
橡塑技术与装备(2021年23期)2021-12-13
科学大众(2021年8期)2021-07-20
陕西理工大学学报(自然科学版)(2020年6期)2021-01-15
设备管理与维修(2020年20期)2020-11-17
好孩子画报(2020年10期)2020-11-02
装备机械(2019年4期)2019-12-26
经济技术协作信息(2018年20期)2019-01-19
中国新闻周刊(2017年23期)2017-07-12
科技创新导报(2016年3期)2016-05-30
河北遥感(2015年2期)2015-07-18
