
基于组合定位技术的多波束海洋地形测量分析
2023-12-05 09:07陈敏兰
黑龙江科学 2023年22期
陈敏兰
(广州惠民信息科技有限公司,广州 511400)
海洋资源的开发正处于高速发展阶段,而海洋地形测绘工作尤为关键,精准的测绘结果可为后续开发提供安全保障。多波束测深技术是一种先进的测绘技术,在海洋地形勘测中具有重要的作用。其可对海底表层进行全方位、无死角的测量,测绘所得数据量极大,可进一步完成数据处理,消除波浪起伏及其他不确定的海况问题,搭配数据预处理技术,为多波束测绘技术形成补充效果,保证测得数据的准确性。
1 多波束测深系统
多波束测深系统包含多个不同的子系统,是一种应用于海洋基础测绘任务的新型组合测绘设备。
目前市面上的多波束设备型号多样,在系统组成方面具有较高的相似性,包括数据采集与数据处理系统、声学系统、外围传感器及成果输出系统,详见图1。
数据采集与处理系统(MCS),核心工作任务是发出声波信号、接收返回的声波信号,与系统数字信号进行相互转换,准确记录声波发出之后的旅行时长,以此为基础计算声波的实际传播距离。其主要包括波束控制单元、数据处理计算存储设备、实时声呐影像显示单元及导航控制单元等。
声学系统(MBES)核心组成为声呐换能器,该设备可发出并接收波束信号。现有换能器大多为铁电陶瓷型,为保证发射出的波束信号可按照既定方向进行指向性传播,换能器的基阵部分会设计成多个不同的组成基元,并将这些基元安装在对应的导流罩内,通过这种方式对各种外界噪声因素进行有效规避,消除不良影响,保证信号传递质量。
其他外围设备主要起到辅助作用,可为多波束系统传感器的参数测量提供保障。其包括导航定位设备、声速剖面仪设备等。其中,定位设备为船体测深作业提供实时导航信息,现有定位设备一般是由GPS系统提供导航辅助作用;姿态仪设备的主要作用是收集船体发生的纵摇参数、横摇参数及涌浪参数,对船体出现的实时运动状态进行准确记录,对后续测得的水深参数值进行合理修正;声剖仪设备可准确测量投放点区域的声速剖面,能够拟合测量水域周边的声速空间信息;电罗经可完成数据处理,为数据处理系统提供必要的测量船实时信息,保证航向信号的反馈准确性、及时性。

图1 多波束测深系统的基本组成结构Fig.1 Basic structure of multi-beam sounding system
成果输出系统对测量资料加以处理,显示准确的图像信息,在使用不同类型的海道测量技术时,可配合相关软件对关键数据执行后处理操作,针对不同坐标系信息参数进行相互转化,保证声呐图像所有细节处理准确,成功输出精准的二维或三维可视化图像。
2 多波束测深系统的基本工作原理
使用多波束测深系统可在一个扇面区域内发射出大量波束,利用这些波束记录多个测点的不同水深值,精确展现出海底地形特征,并对海底的起伏变化进行标识。现有的多波束测深系统在使用方面具有突出优势,与单波束测深仪进行对比,设备测量效率与测量精度均有大幅度提高,可将多波束侧身技术视为海底测深技术领域的开拓性变革[1]。单波束测深仪的工作原理为:针对海底某一点进行测量,垂直发射单独的一个脉冲声波,借助声波接收返回信号记录,明确所测区域的水深值,相应计算公式如下:
(1)
式中,c表示声波在海水介质中的平均传递速度;t表示声波的实际运动时间。单波束测深仪设备会保持垂直向正下方进行波束发射,故其间折射现象造成的影响微乎其微,可忽略不计,但其局限性在于这种声波发射方式仅能得到换能器正下方区域的水深值和地形特征信息,如果想要实现对海堤某一区域的全覆盖式测量,需要进行大量的声波发射作业,此时的航迹布线会变得过度密集,导致水深测量作业量骤升,海底测绘成本大幅度增加。
为解决上述问题,使用多波束测深系统完成测绘任务,能够有效克服单波束测绘存在的不足。多波束测深系统工作原理如图2所示。
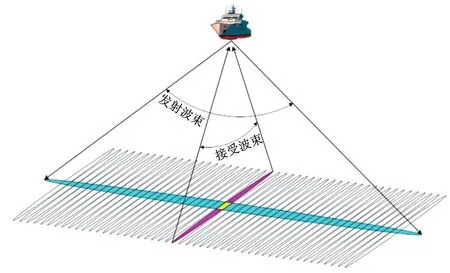
图2 多波束测深系统工作原理Fig.2 Working principle of multi-beam sounding system
如图2所示,多波束系统中存在两个正交功能的换能器设备,可分别实现声呐波束发出功能和声呐波束接收声功能。以多波束的形式向海底进行定向波束发射及接收的过程中存在一定程度的扇形角度窄波束,这些波束可将地形合理划分为多个不同的投影区,通过换能器接收发出的声呐波束在投影区内的反射波角度及实际传播时间,并记录在系统中。在波束的初始产生时间点配合接收机理分析,可保证系统在每一次测量任务中对所在航行方向正下方区域的海底地形产生一个详细的记录,并生成条带式形状的测深剖面图。在对各项参数改正值进行充分考量后,即可计算出各测深点对应的水深值参数,计算公式如下:
(2)
式中,θ代表入射角;ΔDd代表吃水改正参数;ΔDi代表潮位改正参数值。
随着硬件设备的不断发展,信号接收技术与信号处理技术水平也在不断提升,部分多波束测深系统能够同时发出120个以上的窄波束,对应的扇区开角也发展到150°以上。通过足够的密布测线布设测深方案,可确保边缘条带的最终重合度达标,完成对目标海区的测量任务,保证全覆盖水深检测数据的准确性。得到的测深数据在经过系统的辅助参数改正以后,可对水深数据再次进行专业的数字化处理,建立起相应的高程模型,通过这种方式达成海底场景虚拟仿真的三维可视化效果,为海底探测任务及海底资源开发等方面的应用奠定基础。
3 多波束测深系统工作特性
对于传统类型的单波束测深设备而言,在完成一次测量任务的过程中仅需发出一个单独的脉冲波,此时的换能器需要在特定波束角θ内对发出的波束进行严格控制,记录仪设备需要准确记录最先到测深目标地域后返回的波束运动时间,通过式(1)对水深值进行准确计算,这种测深方式受到测深机制的影响,会对最终测深结果形成干扰,主要弊端如图3所示。
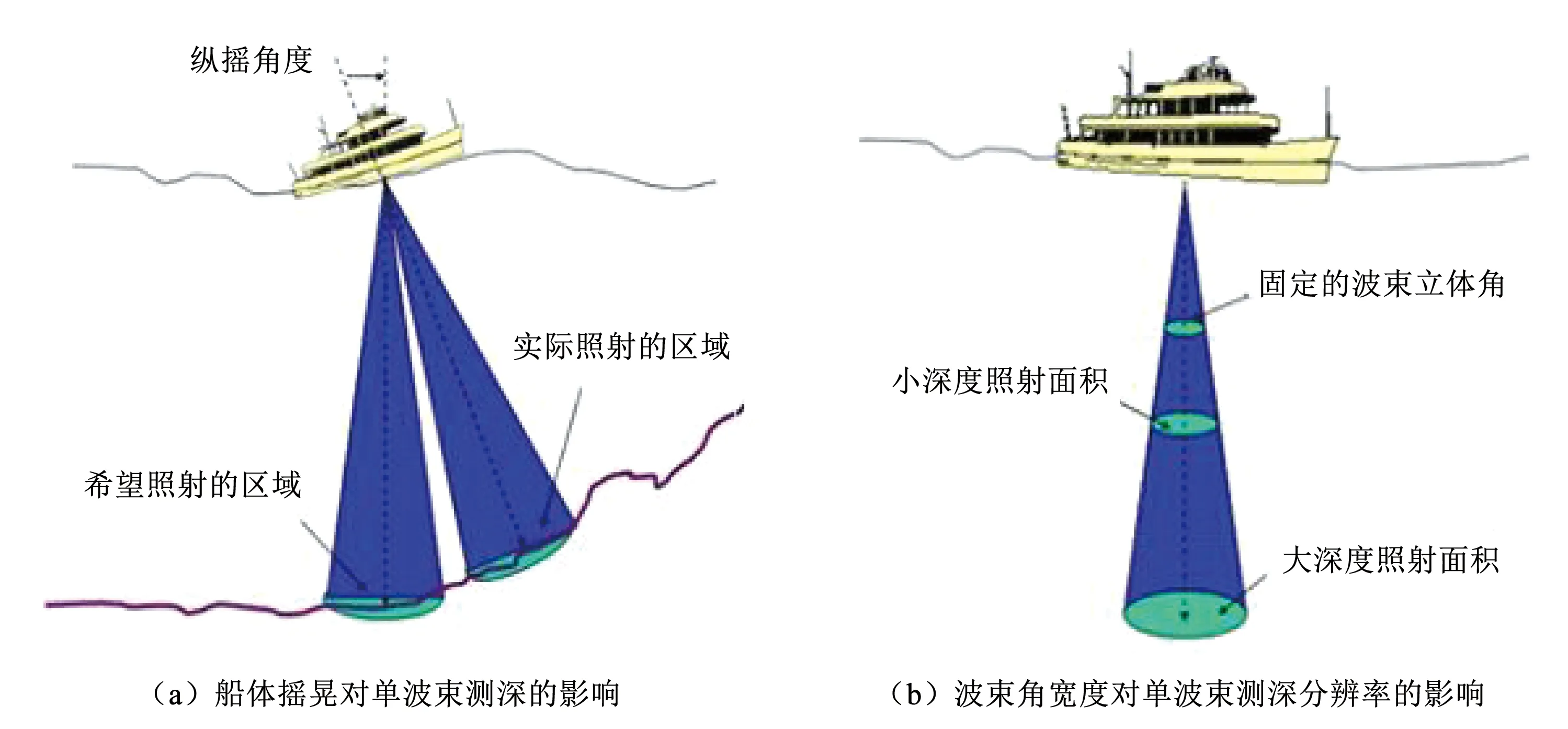
图3 单波束测深仪设备的不足Fig.3 Insufficiency of single beam sounder equipment
如图3所示,单波束测深仪发出的声波仅能测量出仪器正下方垂直方向的底点深度参数,无法对其他点的海底水深进行测量。单波束测深仪设备向海底发射的波束相对较宽,一般在8°~30°,这种测深手段的分辨率水平相对较低,最终测量结果存在较大误差,无法保证测深结果的准确性。
使用多波束系统能够在垂直方向与航行方向上同时发射多个波束,在海底形成一种条带式的系统测深剖面,针对待测量海区进行全覆盖测量。借助运动传感器还能够精确感知测量船发生的实时运动变化,通过束控技术减低波束角度,大幅度提高海底测深作业分辨率[2]。此外,各种高精度导航设备及电罗经具备良好的定位功能,多波束系统可获得每个波束的实际坐标信息,建立更加全面的动态测量三维框架,对海底地形进行模拟仿真建模。
多波束测深系统的主要作业特性如下:发射窄波束完成测量指令,提升测深分辨率。对旁瓣波束形成抑制效果,规避假回波问题。运动传感器可为船姿提供补偿作用,并对波束形成良好的控制效果,大幅度提升测深数据质量。借助配套的高精度参数差,可在GPS定位设备及电罗经的配合下准确得到每个波束脚印对应的大地坐标参数值,并保证数值的准确性。对目标海底区域使用条、带、面的测量方式,大幅提高测深作业效率,保证目标海区范围内覆盖式测量结果的有效性及准确性。
4 多波束辅助测量数据的预处理
4.1 潮汐调和参数的分析及改正分析
一般情况下,空间与时间在变迁过程中会对海洋潮汐造成一定程度的微小变化,随着测量区域面积的不断扩大,此类变化会对测深精度结果造成较大影响。因为潮位会对理论深度测量参数造成影响,故基准面信息的测量结果同样会受到影响,对观测资料进行数据对比分析可知,我国大部分海岸线周边的海域潮位差数据能够达到数米以上,故潮汐改正尤为重要,需要保证合理性,避免对成图精度造成不良影响。大量多波束测深数据结果处理实例表明,参数不合理的部分潮汐改正,会对条带重合区域的测深结果造成影响,等高线系统性也会变得扭曲。保证潮汐改正参数合理,还能保证拟合的海底地形更加精准、平滑。潮汐参数改正主要包括以下几种方式:
1)最小二乘潮位拟合法。此法默认潮位处于一定范围内会发生线性变化,借助各验潮站给出的数值关系,可求出不同验潮站对应的基准面偏差参数及相关参数,以此为基础通过参数比较计算出待求点位的水位参数改正值结果。
2)基于潮汐动力模型的水位改正方法。借助固有潮汐模型成功推算出已有验潮站给出的模拟水位值参数值,将此参数与实测水位值参数进行对比计算,即可计算出比例系数。将此系数借助距离加权法成功附加至待求点位的改正点,再将各站点对应的潮位残差值参数归算至待求改正点参数,即可计算出待求改正点参数的最终模拟水位值,且该数值具备实时性特征。
常规情况下,运用潮波运动方程配合边界条件即可形成新的固定潮汐模型,比较常见的推算方法包括有限差分法、控制体积法、有限单元法等。借助固定模型即可计算出调和常数,并准确预报天文潮位信息,此时的数值参数与实测潮位参数之间的数值关系如下所示:
TR(t)=αTF(t+β)+γ
(3)
式中,α表示不同验潮站之间存在的潮差比例系数;β表示不同时间序列对应的潮位差参数;TR(t)表示在t时刻潮位的参数;TF(t)代表预报天文潮汐数据参数。
设定初始值α0=1、β0=0、γ0=0,对上述关系式进行线性化处理,可得到下述方程:
V=AX-l
(4)
式中,V表示闭合差向量;X=[Δα,Δβ,Δγ]r表示未知参数向量;A表示设计矩阵,对应的行元素如下所示:
(5)
式中,l表示常数向量,与其相对应的行元素如下:
[-α0TF(t+β0)-γ0+TR(t)]
按照最小二乘法准确,得出如下公式:
X=(ArA)-1Arl
(6)
在正式计算过程中使用迭代法,当[Δα,Δβ,Δγ]的值小于限差时,可以成功跳出迭代计算过程并准确输出计算参数。借助上述公式可计算出A、B、C三个站点对应的潮汐比较桉树,将上述参数使用反距离加权算法赋予到对应的P点,准确计算出α、β、γ的参数值,站点P对应的最终潮位改正值h(t)如下:
h(t)=αC(t+β)+γ
(7)
式中,C(t)表示站点P最终预报的天文潮位参数。
联立计算各站点对应的预测潮位改正值,经计算,实测潮位参数与模型潮位之间存在的差值水平如下所示:
∂1(t)=TR1(t)-α1TF1(t+β1)-γ1
(8)
各站点凭借反距离加权差值算法可降低空间关联性,并将各站对应的残差值赋予至P站点,即可得到P站点对应的水位序列:
TP(t)=h(t)+δP(t)
(9)
3)GPS无验潮改正模式。GPS无验潮模式测深技术应用频率较高,作为一种新兴测深方法受到高度关注,水深成果数据能够经过GPS给出的大地高参数与平面垂直参数进行基准转换得到最终测深值,目标水域内不再需要专门布设临时验潮站即可完成测深任务,可凭借实时处理方式(GPSRTK)和后处理方式(GPSPPK)两种手段完成测深任务。其中,GPSRTK模式主要是对载波相位参数进行及时差分处理,完成后续实时动态定位任务,参数会得到OTF技术的有效支持,在技术水平得到进一步提升后,测深精度也可得到精确保障,甚至达到厘米级水平。但在测深作业期间会受到来自数据传输距离产生的限制作用,设定的基准站及流动站不可距离过长,避免对最终测深结果造成干扰。此测深方式适用于部分小区域范围内的水深测量。GPSPPK技术的本质是数据处理期间的解算相位整周模糊度,能够突破无线传输距离形成的约束作用,在80 km以上的海区范围内有效完成水深测量任务。与其相应的GPS无验潮改正模式可妥善处理潮位参数与波浪参数之间的分离问题,这种测深模式下的多波束作业不再需要进行专门的验潮作业和吃水改正作业,发展潜力巨大,可在海洋测绘工作中大量应用。
4.2 声速剖面参数误差及改正
采用多波束技术,其波束本身无法与海水面保持垂直发射状态,海水中的声速会随着环境温度、盐度变化及压力不规则变化而发生变化,故波束在海水中的传播轨迹大多呈连续的曲线。如果直接在数据处理环节使用波束平均声速参数与旅行时间参数计算海底地形点对应的水深值,会导致测量成果存在较大误差[3-7]。要想保证水深测量数据的准确性,需明确波束在海水运动中的声速变化特征。声速剖面可通过直接法或间接法来确定,其中,直接法及其相关仪器设备可直接准确测量声速剖面信息,但因为部分仪器的市场价格较高,站点布设密度较大,无法有效覆盖整体海域,故需配合间接法共同使用,通过对声速经验模型的模拟明确声速剖面参数信息。
4.3 定位数据优化技术
导航定位技术是使用船载多波束完成测深任务的基础,而定位数据的精准度是保证系统测量水深数据准确性的先决条件。卫星信号传递过程中面临着失锁问题、电离层问题及对流层误差问题,航向航速的变化会对GPS数据传输造成一定程度的影响,故测量结果误差较大,误差还会随着天气的变化及海况发生变化,测深参数与实际深度参数之间的差异会不断加大,导致测量作业难度加大。为妥善处理上述问题,保证测深成果的可靠性,需对定位数据技术进行实时优化,对相关数据参数进行有效处理,在GPS参数误差相对较大时使用分离拟合内插法进行优化处理,如果GPS给出的定位数据精度较高,则可使用直接图示编辑法进行参数优化。
分离拟和内插方法。对高频粗差参数进行集中处理,对部分受到测量船船速影响或航向突变影响而出现跳点的参数进行删除处理,使用三次样条拟合法对这些处于空白状态的站点数据进行计算,整理出变化均匀的航迹线信息。消除粗差影响后,测深参数中还会存在部分因为风浪影响或电离层交替变化影响造成的系统中频随机误差参数,可使用最小二乘法对参数信号进行平滑处理,打开原始多波束中的GPS导航文件,用拟合点参数的相关辅助信息取代初始参数值即可。
直接图示编辑方法。针对定位数据发生参数错误率较低的情况,使用图示编辑法进行集中处理,此方法需要建立相应的数据坐标、航向坐标及航速图示变化曲线,通过人工交互作业形式对存在错误的站点参数进行标识及改正处理。
导航技术、定位基础、检测技术、声呐技术等新兴技术手段层出不穷,在实际应用中具有独特的价值,可保证测深作业质量,对测绘结果进行合理优化及修正,保证测绘数据的准确。
5 结束语
现代海洋地形测绘技术已经成功将导航定位技术、多波束水深测量技术及潮位观测等融合到一起,形成了更加系统的测深技术体系,具有多技术、多系统特征,集成化应用效果明显,这些技术方法的配合使用可取得更为理想的效果,促进海洋测绘行业的发展,为海洋资源开发奠定基础。
猜你喜欢
河北水利(2022年10期)2022-12-29
海洋通报(2022年4期)2022-10-10
武汉理工大学学报(交通科学与工程版)(2022年4期)2022-09-07
河北地质(2021年1期)2021-07-21
通信技术(2019年3期)2019-05-31
水利水电快报(2019年2期)2019-03-08
电子测试(2018年6期)2018-05-09
水利规划与设计(2017年6期)2017-07-18
声学与电子工程(2017年1期)2017-06-22
浙江国土资源(2015年4期)2015-05-09
