交错轴摩擦轮传动及其应用
2023-12-05 08:10姜松姜奕奕陈琦莹陈章耀
中国食品学报 2023年10期
姜松,姜奕奕,陈琦莹,刘 维,冯 侃,陈章耀
(1 江苏大学食品与生物工程学院 江苏镇江212013 2 江苏大学土木工程与力学学院 江苏镇江 212013)
交错轴摩擦轮传动是一种未被广泛认知且被忽视的传动机构,虽以不同结构形式和不同命名在一些特殊领域中得到广泛应用,但在整体上人们还未真正认识其传动原理和其在机构分类中的归属。交错轴摩擦轮传动是摩擦轮传动中除平行轴摩擦轮传动和相交轴摩擦轮传动之外的第3 种传动方式,两摩擦轮轴线之间既不平行也不相交,是空间交错,不同的约束形式可实现输出运动为直线移动或螺旋运动[1-3]。其在物料的自动输送、工作装置的牵引、平台的精密定位、远距离输送、运动形式的转换等方面有较广泛的应用[4-12]。过去的100 多年中交错轴摩擦轮传动技术取得了较大的进步,形成了代表性的应用和定型的产品。1915年导轮和托板的引入是现代无心磨床的起点[13],无心磨床实现了被磨削工件的自动进给,导轮与被磨削工件之间的传动关系即为螺旋运动输出的交错轴摩擦轮传动;钢管斜轧穿孔机的原理也是这种运动形式[6]。20 世纪50 年代德国UHING 公司开发了主要用于电线电缆工业的收线装置和复绕设备上的光杆排线机构,其原理为内接触交错轴摩擦轮传动,将转动转化为直线移动且可实现无级变速[14-15];而日本NB 公司开发了外接触交错轴摩擦轮传动的直线位移传动装置[10];20 世纪90年代意大利DEA 公司推出的GAMA 型三坐标测量机,将交错轴摩擦轮传动直线移动输出机构应用于精密定位系统的传动[16]。
交错轴摩擦轮传动技术之所以受到人们的关注,在于其具有以下重要的传动特性[1-12]。①将回转运动转换成螺旋运动或直线移动,当交错轴之间的夹角(偏置角)变化时,可实现输出运动参数可调;②在闭环控制系统中可以实现高精度传动和定位;③可实现远距离输送和往复运动;④在一定范围内驱动能力可任意调节并具有自适应功能;⑤具有过载自保护能力;⑥传动效率高、磨损小、寿命长、成本低、结构和制造工艺简单。然而,其在各工程领域的名称各不相同,在机械类教材和设计手册及相关资料中未将其归入摩擦轮传动的分类体系,也未见文献对其进行系统阐述。目前深入研究较少,而工程应用很广泛。
本文将系统地总结和归纳交错轴摩擦轮传动的基本原理和基本传动形式,明确其归属,完善摩擦轮传动的分类体系。发掘梳理交错轴摩擦轮传动两种基本传动形式在各种工程装备上的应用和研究进展,以及典型产品(部件)和特殊的组合应用;最后提出目前存在的主要问题,并对其发展趋势进行展望。为其今后更广泛的应用提供参考和借鉴。
1 传动原理及形式
交错轴摩擦轮传动是一种结构简单的空间机构,其中一个构件(一般是从动轮)作螺旋运动,这是其核心特征。当采用不同约束关系,可实现螺旋运动或直线移动方式输出,可适用于不同的应用场景。
1.1 传动原理
1.1.1 传动关系 交错轴摩擦轮传动组成及结构关系,如图1 所示,其由主动摩擦轮和从动摩擦轮及机架等组成,主动摩擦轮和从动摩擦轮支撑轴轴线之间的夹角为φ,称之为偏置角。当主动摩擦轮1 旋转时,从动摩擦轮2 在两轮接触点摩擦力的作用下同时作旋转运动和直线运动,即作螺旋运动[1-3]。
图1a、1b 是交错轴摩擦轮传动机构的两种基本形式[1-2],图1a 为从动摩擦轮绕其支撑轴轴线转动并同时沿该轴轴线方向移动(相对于主动轮轴线方向是斜动);图1b 为从动摩擦轮及其支撑轴绕其支撑轴轴线做转动并相对机架做平动,移动方向为主动摩擦轮支撑轴轴线方向(相对于主动轮轴线方向是直动);两者的差异仅仅是从动摩擦轮移动方向不同,因而分别称为斜动式和直动式交错轴摩擦轮传动;图1b 可以视为图1a 从动摩擦轮在主动摩擦轮轴线垂直方向运动受限演化而成。图1c 是图1b 机构示意图另一种表达形式,两者是等价的。
1.1.2 运动关系 将图1a 和图1b 的主动摩擦轮表面展成平面(平板),即形成与图1a 和图1b 等效的从动摩擦轮与平板之间的传动,如图2a 和图2b 所示[2]。
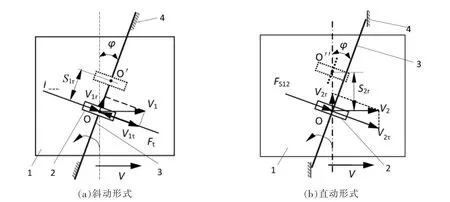
图2 交错轴摩擦轮传动机构的运动和力分析示意图Fig.2 The diagram of the motion and the force analysis of the crossed friction wheel drive
当主动摩擦轮以接触点线速度V 转动时,运用基点法,则两种运动形式的从动轮转动速度和移动速度及位移(导程)之间的关系如图2a 和图2b,其理论计算关系如表1 所示[2]。

表1 两种运动形式的从动轮转动速度和移动速度Table 1 Rotation speed and moving speed of the driven wheel for two types of motion
由表1 可知,当主动轮转速和偏置角φ 一定时,交错轴摩擦轮传动机构理论上能实现定传动比;当主动轮转速一定时,从动轮转动速度和移动速度(输出速度)随偏置角φ 的变化而变化,可用于调速;当偏置角φ 为0°时,机构转化为平行轴摩擦轮传动,可用于移动暂停变换;当偏置角φ 为90°时,斜动形式转化为摩擦轮与摩擦条传动,而直动形式此时不能成为传动机构;当偏置角反向设置即为-φ 时,从动轮移动速度方向也反向,而从动轮转动线速度不变,可用于移动方向的转换。
1.1.3 驱动能力 交错轴摩擦轮传动的驱动能力与一般摩擦轮传动一样,理论上取决于摩擦轮间的静摩擦系数和接触处压紧力形成的静摩擦力的大小。为确保可靠有效传动,实际设计时驱动力应小于滑动摩擦力。当交错轴摩擦轮有效传动时,摩擦轮接触处所产生的静摩擦力随外加载荷而变化,接触处静摩擦力与所加的外载荷能自适应平衡,静摩擦力方向与从动摩擦轮轴线之间的夹角取决于所加的载荷。当仅加与从动轮轴向一致的载荷时,静摩擦力方向基本上沿从动摩擦轮轴线方向;当仅加与从动轮周向(转矩)一致的载荷时,静摩擦力基本上垂直于从动摩擦轮轴线方向;当从动轮同时加轴向和周向(转矩)载荷时,静摩擦力与从动摩擦轮轴线夹角取决于所加的载荷比值[3]。从动摩擦轮运动参数及与主动轮之间运动关系不受外加载荷的影响[3]。
1.2 传动形式
1.2.1 按运动形式 交错轴摩擦轮传动可分为直动式和斜动式两种形式[2],斜动式交错轴摩擦轮传动输出的是螺旋运动形式(图1a),直动式交错轴摩擦轮传动输出的是直线移动形式(图1b)。直动式交错轴摩擦轮传动是斜动式的一种运动转换形式。
1.2.2 按接触形式 交错轴摩擦轮传动按主动轮与从动轮接触形式可分为外接触和内接触形式[2,10,14-15]。斜动式交错轴摩擦轮传动一般都为外接触,而直动式交错轴摩擦轮传动的外接触和内接触形式都有应用。按从动轮数量常见可分为单轮(图1b)、双轮组合和3 轮组合(图3 为外接触;图4、图5 为内接触)及4 轮组合(常见的在图4中再增加一个斜轮(环))[14-15]。

图3 光轴与斜轮外接触Fig.3 External contact between the plain shaft and the inclined wheel
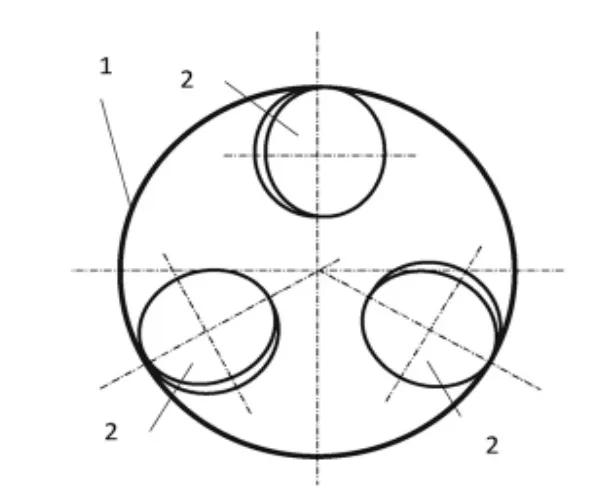
图5 管道内壁与斜轮内接触Fig.5 Internal contact between the inner wall of the pipe and the inclined wheel
1.2.3 按轮地形式 当图1 中主动摩擦轮直径趋向于无穷大,该轮转化为平面,形成移动平面与摩擦轮传动;当平面为地面时,即为轮地交错轴摩擦轮传动,此时根据相对运动原理主动(驱动)运动由从动轮中心支撑轴的支座承担。轮地交错轴摩擦轮传动也可分为斜动式和直动式两种形式[3],是交错轴摩擦轮传动的特殊形式,如图6、7 所示。

图6 斜动式轮地交错轴摩擦轮传动Fig.6 Wheel-ground crossed friction wheel drive of tilt-moving

图7 直动式轮地交错轴摩擦轮传动Fig.7 Wheel-ground crossed friction wheel drive of direct-moving
1.3 分类体系
在传统的摩擦轮传动分类体系中一般仅有平行轴和相交轴[17-18],图8 中增列了交错轴摩擦轮传动(点划线框内),首次使摩擦轮传动的分类体系得到了完善,形成了平行、相交和交错轴完整的分类体系。定传动比和变传动比交错轴摩擦轮传动的应用,如后文的德国UHING 公司和日本ASAHI产品等。
2 工程应用及研究进展
2.1 转动转换成螺旋运动的应用
转动转换成螺旋运动的斜动式交错轴摩擦轮传动广泛应用于磨削和轧制及矫直设备中,其传动的基本原理如图1a。在无心磨床贯穿法中,调节轮与被磨工件之间偏置一定角度(一般0°~8°),在旋转导轮的作用下被磨工件作螺旋运动,实现磨轮磨削和被磨工件的自动进给[7]。在钢管斜轧穿孔机中,轧辊与管坯之间偏置一定角度,管坯在旋转轧辊的作用下螺旋运动,实现轧制穿孔和管坯自动进给,钢管斜轧穿孔机有两斜辊和三斜辊形式[6];斜轧也可实现零件轧制[19]。在抛光机中,旋转导轮与被抛光件作用原理与无心磨床一样。在圆截面金属管材和棒材的斜辊矫直机中,斜辊与被矫直工件之间偏置一定角度,被矫直工件在斜辊的作用下螺旋运动,工件在多个斜辊组的作用下被矫直并作自动进给[20-21]。在圆截面钢管(棒)送料机中,有钢管感应热处理的辊式送料机,无心磨床滚轮式送料机等,实现工件螺旋输送。螺旋运动的运动参数关系为表1 中的“斜动形式”所表示的关系。
2.2 转动转换成直线运动的应用
转动转换成直线运动的直动式交错轴摩擦轮传动在直线移动送料、远距离输送和缠绕作业等工程上得到了广泛应用,而且还用于精密定位传动,其传动的基本原理如图1b,其接触形式有外接触和内接触,如图3 和图4。
某种柴油机中利用4 个滚动轴承与光轴轴线偏置内接触形成的光轴螺旋传动,驱动调速杆实现柴油机的调速功能[5]。某扩散炉上利用2 组6 个滚动轴承与光轴轴线偏置外接触形成的光轴滚动螺旋传动,实现扩散炉上送片装置地直线运动[8]。冰箱制造的发泡线上夹具输送小车的驱动部分所用的采用一组斜轮与光轴轴线偏置外接触形成的斜轮——光轴摩擦传动实现小车移动[4]。利用摩擦轮与光轴轴线偏置外接触形成的旋转光轴直线驱动装置还可实现窗帘、门、汽车玻璃窗的自动开合功能[9,22-23]。缠绕线(丝、带)机也是利用相同的原理实现缠绕功能[24-26]。此外,还可以实现远距离输送、传动比调整、显微镜微调等[27-29]。
管道机器人的驱动是利用3 个120°分布的轮子与管道轴线偏置实现其在管道内的直线移动,结构关系如图5 所示,传动原理属于轮地交错轴摩擦轮传动,如图7 所示(假设平面(地面)卷成管道)[30-34]。
2.3 应用基础研究
2.3.1 斜轧技术 斜轧是轧辊轴线与坯料轴线相交一定角度的轧制方法,斜轧又称为螺旋轧制。斜轧的轧辊互相交错成一定角度,并做同方向旋转,使坯料在轧辊间既绕自身轴线转动,又沿其轴线作前进运动,即螺旋运动。与此同时受压变形获得所需产品。1862 年英国人Dyson 发明了二辊矫直机,用于矫圆和平整及抛光圆钢棒材,这是人类首次出现的斜轧技术,是钢管工业奠基性发明之一。1883 年德国人Mannesmann(曼内斯曼兄弟)发明了一种无缝钢管斜轧穿孔工艺,是用斜轧完成金属塑性成形的第一人,是钢铁工业史上的重大发明之一,由此揭开了无缝钢管生产的新篇章[35]。20世纪70 年代起陈惠波基于共轭运动与共轭几何原理进行了管(棒)材矫正机辊形曲线理论研究和斜轧辊形设计的数学建模,构建了无缝钢管斜轧(几何)原理及非代数曲面轧辊的设计方法[36]。目前,斜轧技术的相关文献都未阐明斜轧的轧辊与坯料之间的传动机理,仅仅分析了运动的参数关系。由上述的传动关系可知,其传动原理符合图1a,属于斜动式交错轴摩擦轮传动,其特征是坯料作螺旋运动,且与轧辊轴线偏置一个既定的角度。
2.3.2 精密定位传动技术 在精密工程中,定位传动是一项关键技术。超精密机床和测量机的定位系统应该具备很高的定位分辨率以及几百毫米的行程。
20 世纪90 年代日本学者Mizumoto H(水本洋)最早提出了应用于精密定位驱动的扭轮摩擦传动(Twist-roller friction drive),并进行了运动学和动力学特性的系统研究,基于闭环控制和静压导轨系统的扭轮摩擦传动定位分辨率小于10 nm,适合于一些切削力比较小的超精密机床和精密测量平台中[37-39];秦付军等[40]将光杆螺旋传动机构应用于大量程、亚微米级微位移工作台系统,对其导程精度和影响因素进行了研究,光杆螺旋传动机构是一种新型的、适合于伺服控制的、造价低廉的高精度传动机构;罗兵、李圣怡、田军委等将扭轮摩擦驱动定位技术应用于精密和超精密机床的设计[11,15,41-44];用于精密定位传动的扭轮摩擦传动和光杆螺旋传动机构其传动原理,如图1c 所示。目前利用直动式交错轴摩擦轮传动实现精密定位驱动的技术在三坐标测量机、影像测量仪中得到了广泛应用[45-47]。
2.3.3 管道机器人驱动技术 螺旋式管道机器人的主要特征是驱动轮的轴线与管道中心轴线有一定夹角,一般螺旋驱动单元由6 个驱动轮组成,每3 个驱动轮安置在一个平面且成120°分布,每个驱动轮由1 个驱动臂与驱动单元本体连接,驱动臂通过卷簧将驱动轮按压于管道内壁形成摩擦传动。在扭矩的作用下,驱动轮绕管道轴线做旋转,与此同时带动管道机器人沿管道轴线作前进运动。由于驱动轮在管道内壁的运行轨迹是螺旋线,由此得名螺旋式管道机器人[48],如图9 所示,其传动原理如图5 所示。对螺旋式管道机器人的研究始于1994 年,Iwashina 和Iwatsuki 的团队首次展示了一种螺旋管道机器人的设计[49-51]。螺旋式驱动管道机器人研究已成为一个热点,马书根团队等开展系列螺旋管道机器人,具有轴向和周向探查功能的螺旋驱动管内机器人、一种用于穿越弯管和支管的螺旋旋入式管道机器人、螺旋驱动管道机器人自救机构[52-54]。任涛[48]开展了适用于小尺寸管道检测的螺旋管道机器人关键技术研究,构建了主动螺旋管道机器人运动学和力学模型,通过理论分析和实验研究,证明了主动螺旋管道机器人的优越性,建立了螺旋管道机器人牵引力分析模型,提出了变螺旋角过弯策略及方法。

图9 运动原理Fig.9 Running principle
2.3.4 交错轴摩擦轮传动机理 在文献[2]和[3]中,笔者首次对交错轴摩擦轮传动机理、转动转换成螺旋运动和直线运动的两种基本形式及驱动能力进行了系统研究,建立了完整的交错轴摩擦轮传动的各运动参数的计算方法,并用仿真软件进行了验证[2-3]。
2.4 标准化产品(部件)
2.4.1 光杆排线器 20 世纪50 年代,德国UHING 公司应用内接触交错轴摩擦轮传动开发了两款回转运动转换成直线运动的传动装置,分别为滚动环传动(Rolling ring drives)(又称为光轴转环直线移动式无级变速器、转环直动式无级变速器、光杆排线器、转环直动变速器,属于变传动比)和直线传动螺母(Linear drive nut)(又称为直动螺母、无牙螺母),并形成了产品标准化和系列化及应用的成套化[55]。
滚动环传动(Rolling ring drives)产品分为RG/ARG 系列各16 个产品(如图10a 所示)、RGK/ARGK 系列3 个和2 个产品、KI/AKI 系列各1 个产品,其中RG/ARG 系列中滚动环设置了3 个和4 个,其传动的接触形式如图4 所示,其传动的基本原理如图1b,其结构如图10b 所示,滚动环(即斜轮)的偏置角β 可在-15°~15°范围变化。由表1可知,调整偏置角可改变光轴每转1 周滑块(滚动环的安装座)移动的位移(类似于螺旋传动螺距),从正偏置角调整到负偏置角可实现滑块的反向移动,当偏置角0 度时滑块移动停止。因此,具有无级调整滑块移动速度(位移)、不改变光轴旋转方向时瞬时换向(往复运动)、传动结合与分离的释放装置、高速运行的特点。20 世纪70 年后期国内企业开始试制光杆排线器(装置),目前生产企业众多,主要分布上海、江苏、浙江、山西等,广泛应用于电线电缆、塑料、纺织、钢铁、有色金属等行业收线和绕线设备上[14,55-63]。
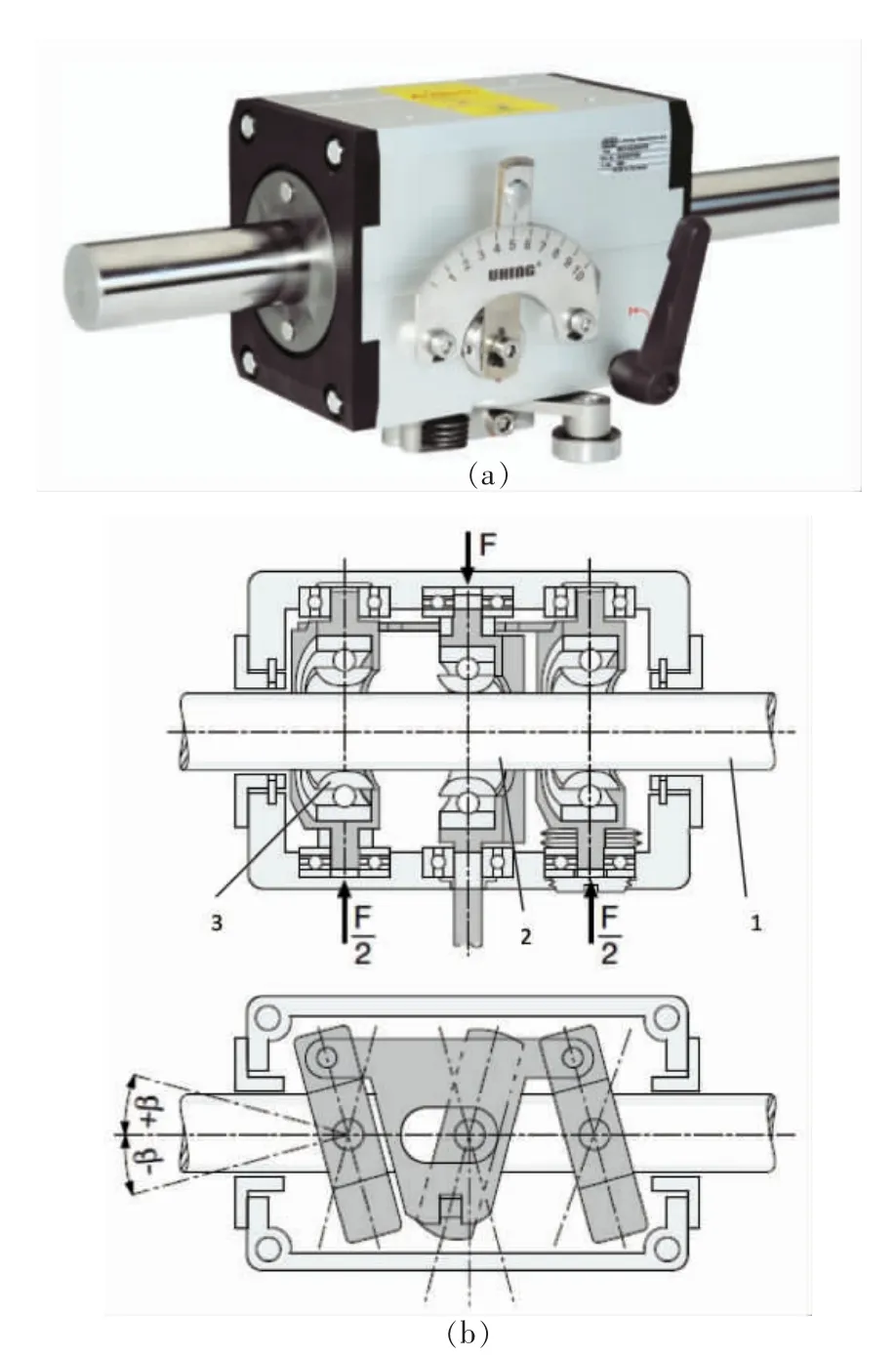
图10 滚动环传动产品外观(a)及结构示意图(b)Fig.10 Product appearance(a)and structure diagram(b)of rolling ring transmission
2.4.2 滑动螺杆 日本ベアリング(NIPPON BEARING)株式会社应用外接触交错轴摩擦轮传动开发了回转运动转换成直线运动的传动装置,称为滑动螺杆(スライドスクリュー)或滑动螺旋杆或直线驱动装置,属于定传动比。如图11 所示产品的结构形式为2 组3 个滚动轴承相对于光轴轴线120°分布,6 个滚动轴承的轴线与光轴轴线偏置一个相同的角度,并将6 个滚动轴承的外圈压紧在光轴上,其传动的基本原理如图1b,其传动的接触形式如图3 所示。公司提供的产品为SS系列,其光轴直径分为6,8,10,12,13,16,20,25,30 mm,除轴径25 mm 以外每个轴径下有2 种螺距(即有2 种偏置角),一共有17 个产品[64]。

图11 NB 滑动螺杆产品外观Fig.11 Appearance of NB sliding screw product
2.4.3 无牙螺母 日本旭精工株式会社生产的ASAHI 回転を直線へ(旋转变为直线)AR 系列产品(如图12),国内译成无螺导杆、线性回转轴承、无牙导杆、无牙螺杆、无牙螺母、直线回转轴承等,属于定传动比,其传动的基本原理如图1b,其传动的接触形式如图4 所示。系列产品内径φ 为10~25 mm 的4 种尺寸,又分左右旋向,共8 种型号(AR10R,AR10L;AR15R,AR15L;AR20R,AR20L;AR25R,AR25L),可实现多种运动需求如图13 所示。可应用于工业机器人、贴标机、自动门、包装机、测定器、高处窗的自动开关装置、印刷机等设备上[65]。

图12 ASAHI 产品外观Fig.12 ASAHI product appearance

图13 运动和组合形式Fig.13 Movement and combination forms
德国UHING 公司的直线传动螺母(Linear Drive Nut)产品为RS/ARS 系列共10 种型号,其传动原理同滚动环传动,而滚动环的偏置角固定。可应用于自动化设备、精密仪器、三坐标测量机、全自动影像仪、印刷网印机、玻璃制造装备、搬运装置、自动包装机等设备[55]。
2.5 组合和特殊应用
2.5.1 基于Mecanum 轮全方位小车 基于Mecanum 轮的全方位移动小车是一种应用非常广泛的机器人[66]。当小车的4 个轮子按一定规律组合驱动时,可实现小车左右、前后、旋转和斜向等全方位运动[67-70],如图14 所示。当Mecanum 轮上的腰鼓形辊子随其转动时,腰鼓形辊子与地面接触形成轮地交错轴摩擦轮传动,其传动的基本原理如图6。应用轮地交错轴摩擦轮传动原理理论可解析Mecanum 轮转速与小车不同方位运动时的速度之间的关系。它是交错轴摩擦轮传动的一种比较特殊的应用,利用4 个轮子上的腰鼓形辊子与地面形成的轮地交错轴摩擦轮传动的巧妙运动组合,实现整车的全方位运动,4 轮运动组合与小车运动的关系如表2 所示[3]。

表2 4 轮运动组合与平台运动的关系Table 2 Relationship between four Mecanum wheel motion combination and motion mode of platform

图14 全方位移动平台Fig.14 All-round mobile platform
2.5.2 蛙式运动车 蛙式(运动)车是一种健身小车,如图15 所示。当踏板在人两腿外推和内收驱动下作一开一合重复运动时,踏板分别带动其末端的万向轮运动,此时两万向轮与地面形成轮地交错轴摩擦轮传动关系(其传动的基本原理如图6),从而使两个万向轮的轴向运动转化为蛙式车整体的前进运动(直线移动)[2]。

图15 蛙式运动车Fig.15 Frog kick scooter
2.5.3 卵形体农产品大小头自动定向中分列运动
在卵形体农产品大小头机械式自动定向装置的分列运动中,卵形体农产品在两侧转动支撑辊子的驱动下沿支撑辊子轴线方向作螺旋运动,实现小头指向不同的卵形体农产品的分列[71-75],如图16 所示。卵形体农产品分列运动的基本原理为直动式交错轴摩擦轮传动,其传动的基本原理如图1b。在类椭球体的采后甘蓝定向过程中,甘蓝在辊轮上绕自身轴线转动的同时沿辊轮轴线方向移动,即作螺旋运动,也属于直动式交错轴摩擦轮传动[76]。与图1b 不同之处在于卵形体农产品的转动轴是非固定支撑轴。
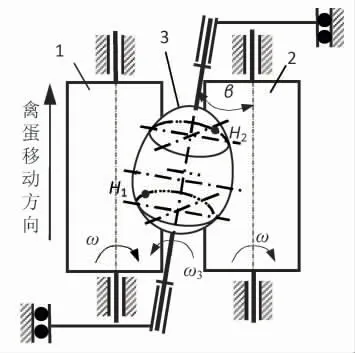
图16 卵形体农产品轴向运动传动原理示意图Fig.16 Schematic plot of transmission principle of ovoid agricultural products axial motion
2.5.4 滚轮支架的窜动 在滚轮支架支撑回转体工件中,当回转体轴线与滚轮轴线不平行时,主动滚轮驱动回转体工件会出现窜动,窜动的原因是主动驱动滚轮与回转体工件两者轴线不平行,形成了一个偏置角,构成了直动式交错轴摩擦轮传动从而产生回转工件的轴向移动[77-79],其传动的基本原理如图1b。
2.6 规范命名
从上述的工程应用及研究进展中可以看到,各领域对交错轴摩擦轮传动机构命名各不相同,甚至有些名称与已形成共识的传动机构名称混淆,对其认识大部分都局限在自身领域,工程界和学术界都未形成共识。目前仅个别教材和手册及专利中,提出这种机构时仅归属于摩擦轮传动的一种运动形式,也未给出机构统一规范的名称[80-95]。可参照齿轮机构按支撑轴的关系分类方法,统一规范为交错轴摩擦轮传动(机构),使目前在不同领域各不相同的名称“光轴斜轮传动、扭轮摩擦传动、滚动环传动、光轴传动、螺旋轮传动、斜轮-光轴摩擦传动、光轴螺旋传动、光轴滚动螺旋传动、旋转光轴直线驱动、滑动螺旋杆传动、内斜轮机构、光杠排线机构、光杆螺旋传动机构、光杆-滚珠轴承传动、无牙螺母、无螺导杆、无牙导杆、无牙螺杆、滑动螺杆、管道机器人的螺旋运动式驱动机构、缆索缠包机驱动机构、钢管螺旋运动式输送辊道的传动”等有统一的归属。归一化规范命名,易于识别,也将有利于其特色鲜明的传动特点能得到更广泛的应用。
3 研究展望
100 多年来交错轴摩擦轮传动在一般传动和精密传动领域得到了广泛应用,可以预期交错轴摩擦轮传动作为一种具有多种独特特点的传动机构,将具有更广阔的应用前景。为了使其得到更广泛应用和提升传动质量,以及使技术人员形成共识,未来的工作主要在以下几个方面:
1)交错轴摩擦轮传动起动和停止及运行过程的动力学特性研究:由于起动和停止时运动过程存在加速度,以及运行过程中接触摩擦力不稳定引起的速度波动,因而需要探讨其运动全过程的动力学特性[2-3,37-44]。
2)传动构件(摩擦轮)接触处的动力学特性研究:接触处应力、驱动能力、可调速装置接触表面形状设计、构件表面滑动与磨损等研究[96-100]。
3)在综合应用中的动力学特性研究:开展基于Mecanum 轮全方位小车和蛙式运动车等综合案例中的交错轴摩擦轮传动运动学和动力学特性的研究[66-70]。
4)工程上应用情况的归类和总结:目前交错轴摩擦轮传动在工程上应用非常广泛,然而由于命名的不一致,很难相互借鉴,需要梳理和总结归纳形成案例集,便于该传动机构的发展和推广。
5)编写和纳入相关的教材和手册:在总结和系统研究的基础上,完善相关教材和手册中摩擦轮传动的基本知识,为该传动机构的研究和发展及应用提供有效的借鉴资料。
4 结语
本文系统地归纳总结了交错轴摩擦轮传动基本原理和两种基本运动形式,以及4 种基本结构形式;构建了完整的摩擦轮传动分类体系(归入了交错轴摩擦轮传动),完善了仅有平行轴、相交轴的传统分类体系;运用交错轴摩擦轮传动的基本原理,阐明了所列举的工程装备上应用的一种两传动构件轴线在空间上交错一定角度的摩擦轮机构的传动关系。
随着装备的自动化、精密化和智能化程度不断提升,交错轴摩擦轮传动的动力学特性研究的不断深入,以及其传动特点在技术界共识的形成,交错轴摩擦轮传动技术必将得到更广泛的应用。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
中国交通信息化(2022年12期)2022-02-11
装备制造技术(2020年11期)2021-01-26
摄影之友(2020年12期)2020-12-23
水利科技与经济(2017年10期)2017-04-25
北京航空航天大学学报(2016年6期)2016-11-16
少儿美术·书法版(2016年12期)2016-02-06
应用光学(2014年3期)2014-06-01
应用光学(2014年6期)2014-03-27