
爬壁机器人吸附方法研究综述
2023-12-04 05:32杨慧轩刘荣何建东安海明白伟伟
机床与液压 2023年21期
杨慧轩,刘荣,何建东,安海明,白伟伟
(1.内蒙古工业大学航空学院,内蒙古呼和浩特 010051;2.北京航空航天大学机械工程及自动化学院,北京 100191)
0 前言
随着社会经济及科技的飞速发展,人们对美好生活品质的追求也相应逐步提升,用机器人代替人类完成危险或极限环境下工作的愿望也越来也强烈。现实生活中,许多重复性高、危害性大、人工成本高的工作目前主要还是依靠人力完成,此类工作包含但不限于钻孔、铆接、喷涂、清洁、故障检测与修理等[1-2]。爬壁机器人的出现为上述工作提供了机器人角度的解决方案。
受自然界生物攀爬方式的启发,对爬壁机器人相关研究工作早在20世纪60年代就开始了,经过60多年的发展,针对不同使用场景的特定用途的爬壁机器人被设计开发,从而完成喷涂、监测、故障检测、维修、清洁等工作。爬壁机器人在实际生产生活中具体应用案例包括造船厂自主焊接工作[3]、船体检测[4]、钢质桥梁检测[5-6]、壁面清洁[7-8]、城市侦察任务[9]等。
由于爬壁机器人广泛的应用需求牵引,学者们致力于研究其关键技术,在保证可靠吸附、稳定运动的前提下,根据具体应用场景设计机器人执行器,同时增强爬壁机器人自动化水平。在爬壁机器人的各项技术中,吸附与运动是机器人可靠完成工作的前提,而吸附对于运动本身意义深远,可靠吸附是爬壁机器人正常工作的重中之重。鉴于此,本文作者对爬壁机器人吸附方法进行梳理,分析研究现状及未来发展趋势,对爬壁机器人的设计与研发提供一定参考。
1 爬壁机器人吸附方法
基于爬壁机器人研究与应用的广泛前景及吸附方法在爬壁机器人研究中的重要地位,下面围绕爬壁机器人吸附方法展开讨论。爬壁机器人吸附方法主要包括负压吸附、磁吸附、仿生吸附、静电吸附、热熔吸附、振动吸附等,需要说明的是不同机器人在应用过程中可能结合了不止一种吸附方法,本文作者在分类时按照机器人主要采用的吸附方式进行讨论。
1.1 负压吸附
负压吸附即爬壁机器人与壁面形成特定区域,在该区域内形成低于大气压的负压,在相对高压的大气压的作用下将爬壁机器人压向壁面[10-11],从而使得机器人吸附于壁面。负压吸附原理示意如图1所示。
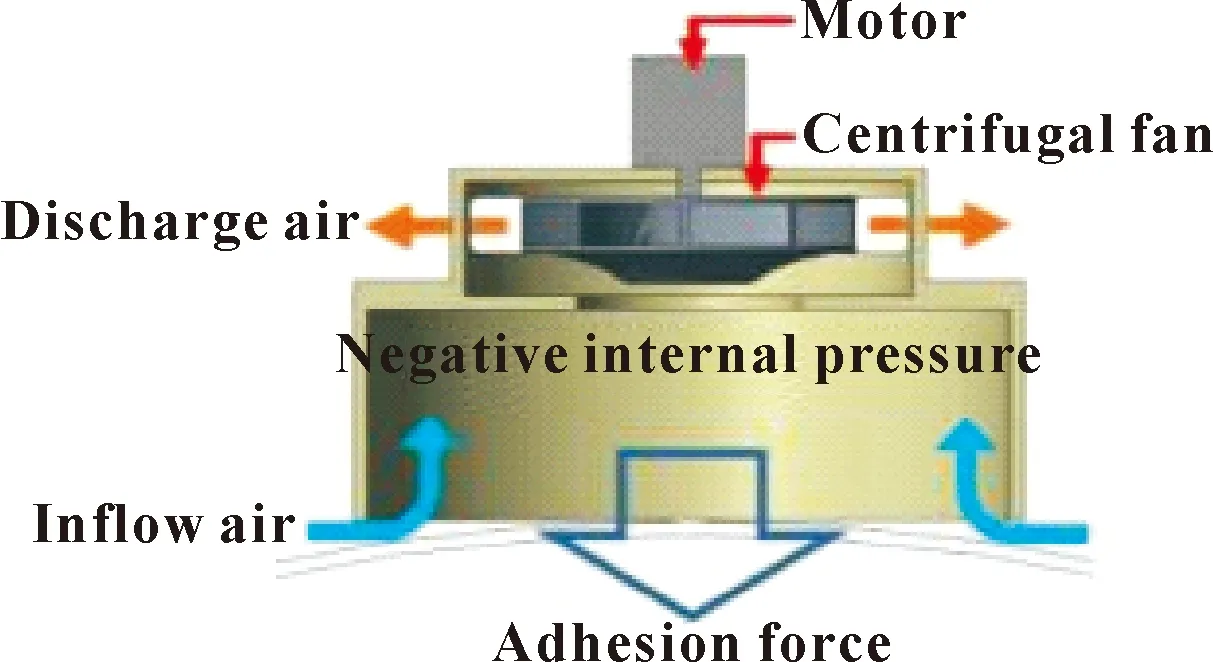
图1 负压吸附原理示意Fig.1 Principle of negative pressure adsorption
从吸附的原理可以把吸盘吸附的方式也归类于负压吸附。文献[12]提出一种爬壁机器人吸附方法,通过电机与导轨联合控制吸盘的伸缩量,从而实现吸盘吸附方式的周期性切换,实现了爬壁机器人吸附。吸附结构导轨工作原理如图2所示。
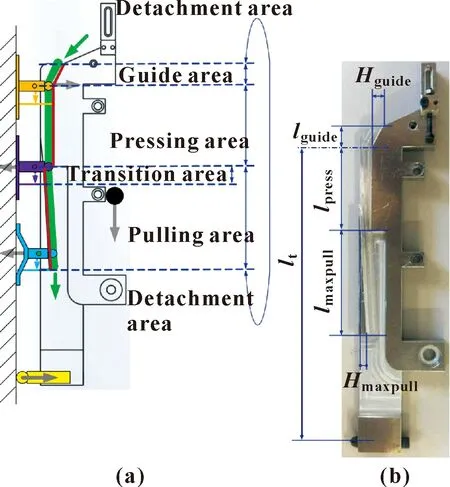
图2 吸附结构导轨工作机制(a)及实物(b)Fig.2 Working mechanism of adsorption structure guide rails(a)and prototype(b)
文献[13]设计了一款负压式全方位移动爬壁机器人,其吸附方式采用涵道电机抽气与双层橡胶密封的形式,如图3所示。全向轮与非接触式吸附方式的结合保证了机器人在吸附壁面优异的运动能力。机器人三维结构示意见图4。
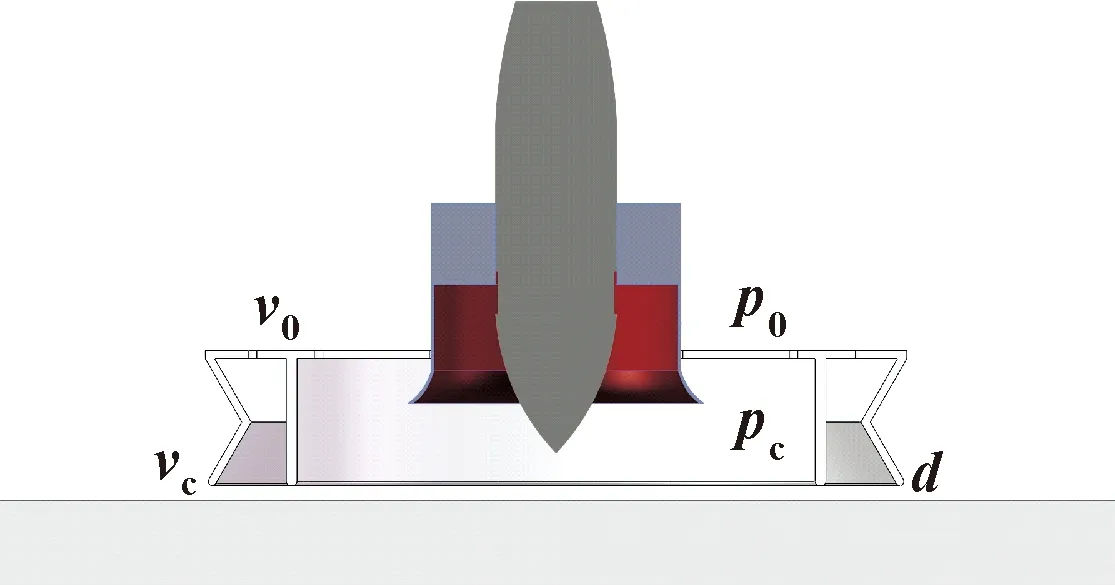
图3 爬壁机器人吸附方式Fig.3 Negative pressure adhesion of the robot
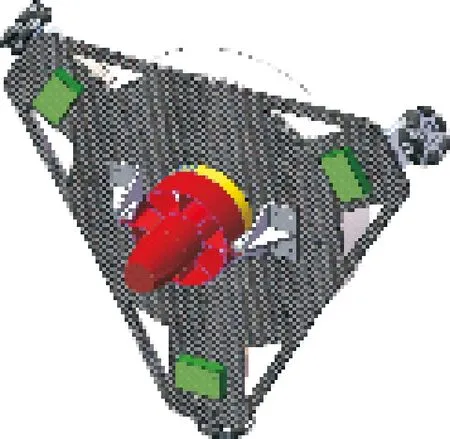
图4 爬壁机器人三维结构Fig.4 3D structure of the robot
针对传统真空吸盘无法攀爬粗糙墙面且吸盘易磨损、越障能力差的问题,文献[14]提出一种用于爬壁机器人的负压机构。通过离心风机高速旋转抽离气流提升机器人吸附能力,设计了软裙结构[15],增加密封性能从而提升了越障能力,实验结果验证了爬壁机器人在粗糙墙面的运动及越障能力。机器人攀爬粗糙建筑墙壁工作图如图5所示。
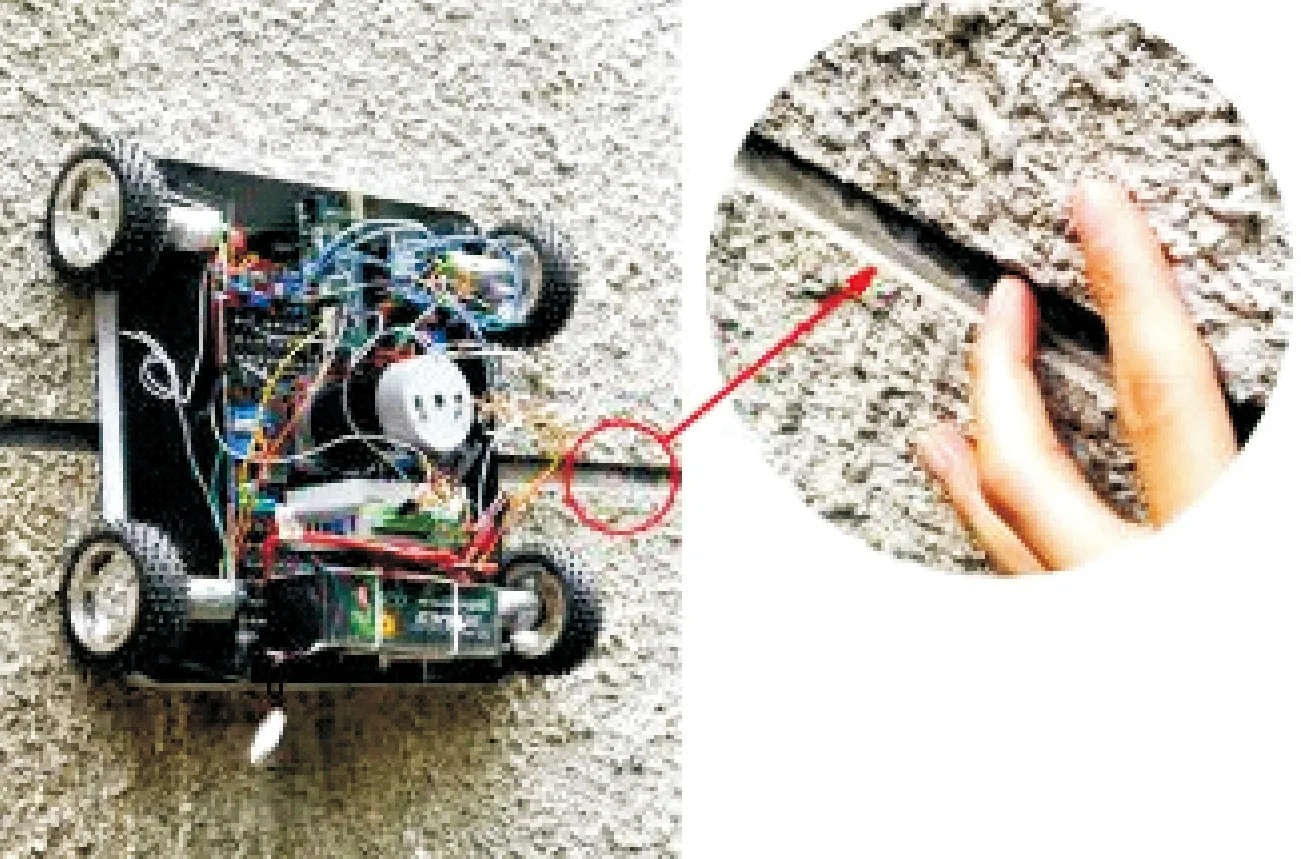
图5 爬壁机器人攀爬粗糙建筑墙壁Fig.5 Wall-climbing robot climbs rough building walls
文献[8]设计了一款垂直玻璃幕墙清洗机器人GFCR。机器人采用安装在行走机构及转向机构上的真空吸盘实现在玻璃壁面上的吸附,转向机构如图6所示。行走机构的导轨使得吸盘在靠近壁面一侧保持工作状态而远离壁面一侧保持关闭状态,进一步实现行走时吸附与分离的切换,具体结构如图7所示。改进后的粒子群算法使得机器人更加节能,在清洁高层玻璃幕墙及光伏太阳能电池板方面应用前景广泛。
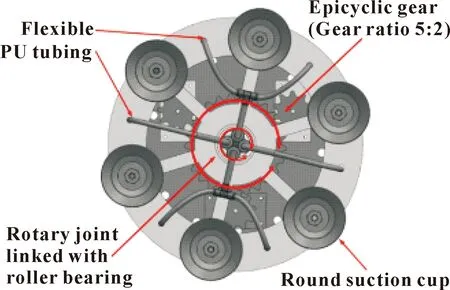
图6 带吸盘的转向机构Fig.6 Steering mechanism with suction cup
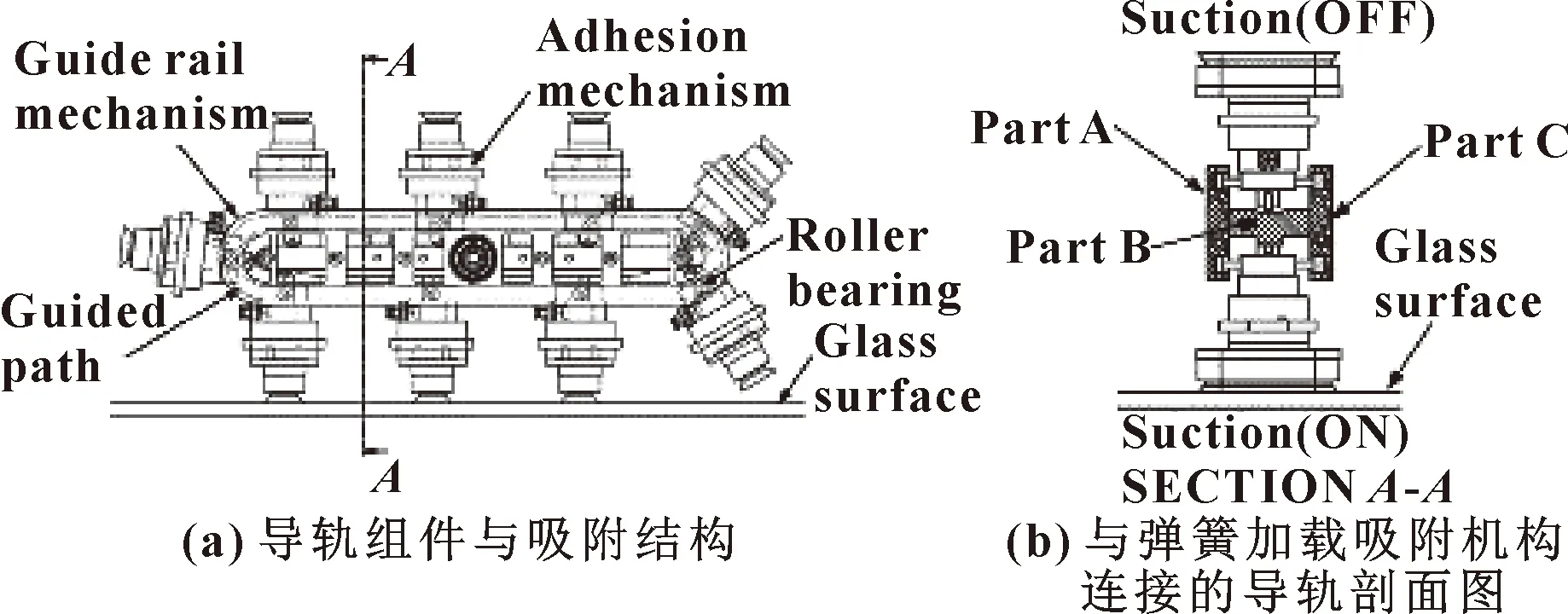
图7 导轨机构Fig.7 Guide rail mechanism:(a)guide rail assembly with the adhesion mechanisms;(b)section view of the guide rail connected with spring-loaded adhesion mechanisms
面对负压吸附空气泄漏导致吸附失效的问题,文献[16]基于独特密封机制设计一种零压差(Zero Pressure Difference,ZPD)吸附方法,基于ZPD方法设计并制造了真空吸附模块。ZPD真空吸附模块在真空区外围形成旋转水层,通过水封的方式使模块内外形成更大压力差,模块内保持高真空,模块外为大气压。实验结果证明:ZPD真空吸附模块能够在更低功率消耗下提供更大吸附力。ZPD吸附模块三维结构及实物图片如图8所示。
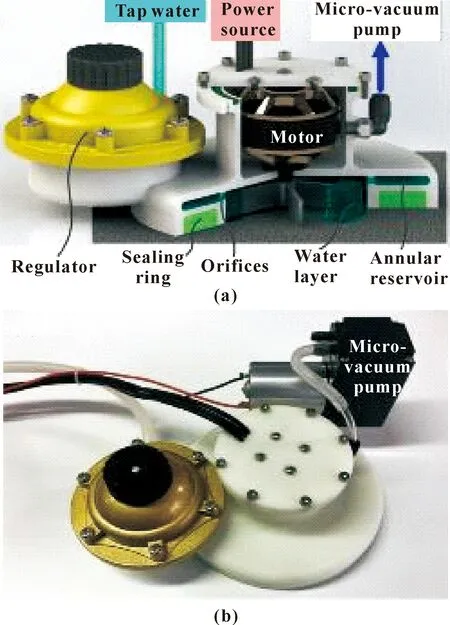
图8 ZPD吸附模块渲染图(a)和实物(b)Fig.8 Rendering photograph(a)and entity(b)of the ZPD suction unit
文献[10]设计一款用于飞机机身检测的爬壁机器人,由于飞机表面曲面多且不适宜采用磁吸附的方式,机器人采用负压吸附与胶皮软裙密封的原理实现在飞机表面的吸附与运动。实验结果验证了爬壁机器人的吸附及运动性能。爬壁机器人吸附单元及工作图如图9、10所示。
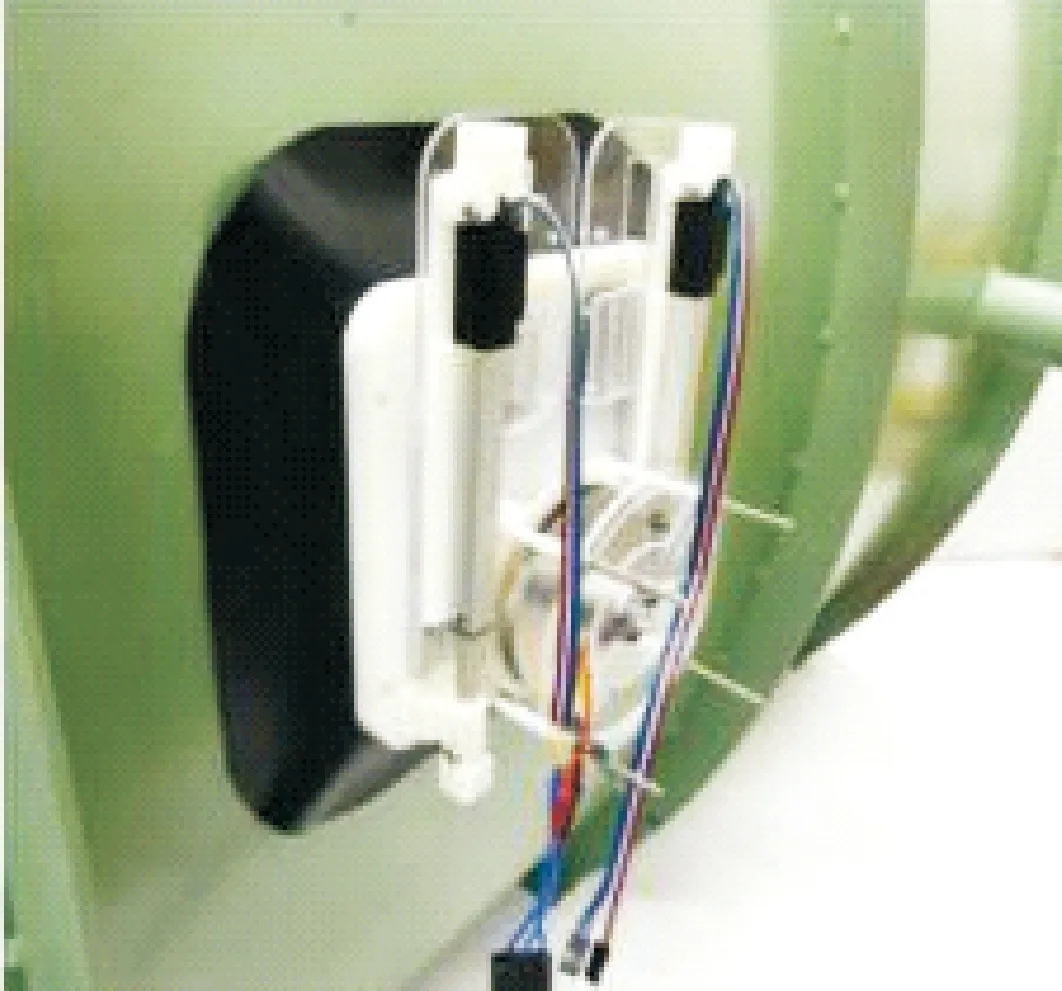
图10 爬壁机器人吸附单元吸附于曲面Fig.10 The adsorption unit of the wall-climbing robot is adsorbed on the curved surface
爬壁机器人完成水下船体攀爬及清理工作仍是一个巨大挑战。文献[17]基于伯努利原理设计了一款负压吸附式水下船体爬壁机器人,用滑动网格进行计算流体动力学建模探索最佳的吸附性能,同时研究了反转螺旋桨(Counter Rotating Propellers,CRPs)速度、机器人底板与吸附物间隙等影响吸附力因素。机器人样机实验结果验证了仿真。爬壁机器人结构三维模型俯视图及爬壁机器人样机实验测试过程分别如图11、12所示。
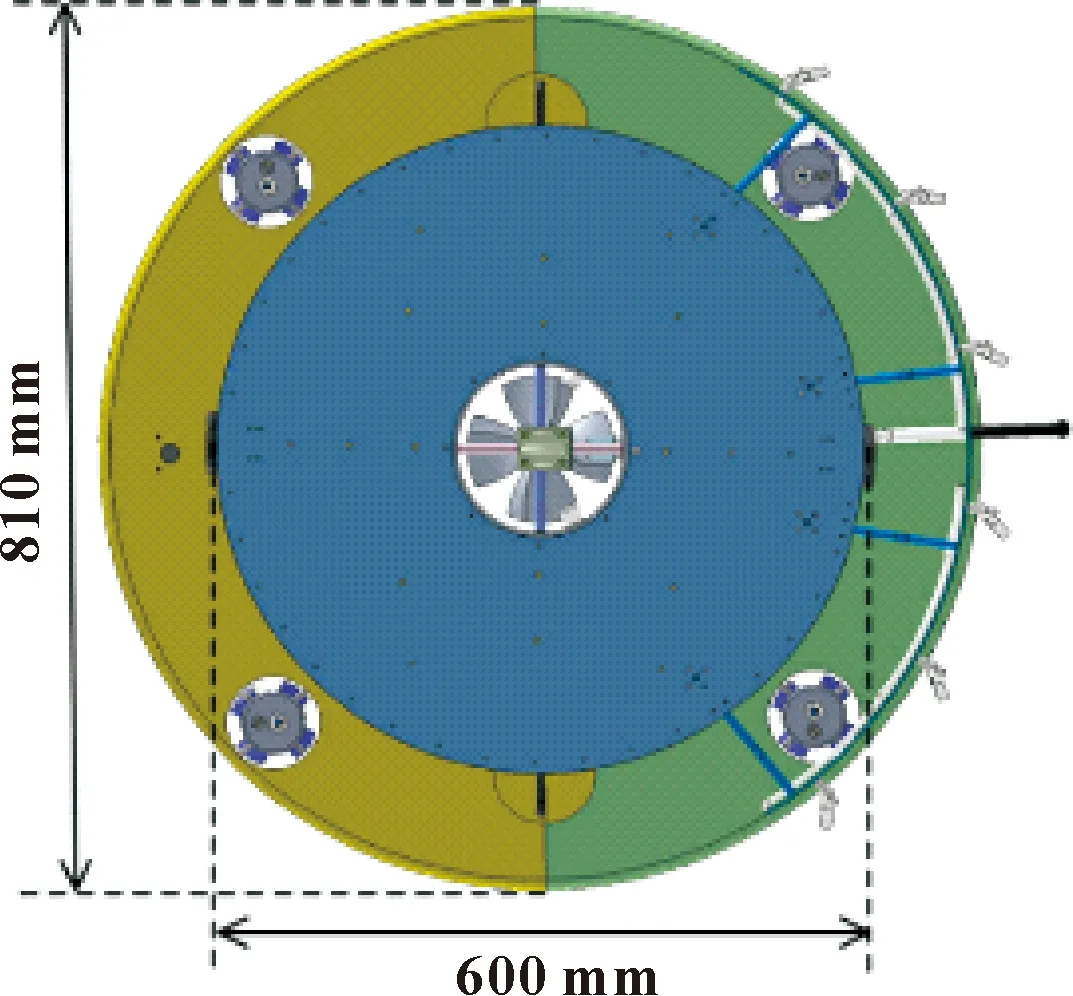
图11 爬壁机器人结构三维模型俯视图Fig.11 Top view of mechanical structure of the robot
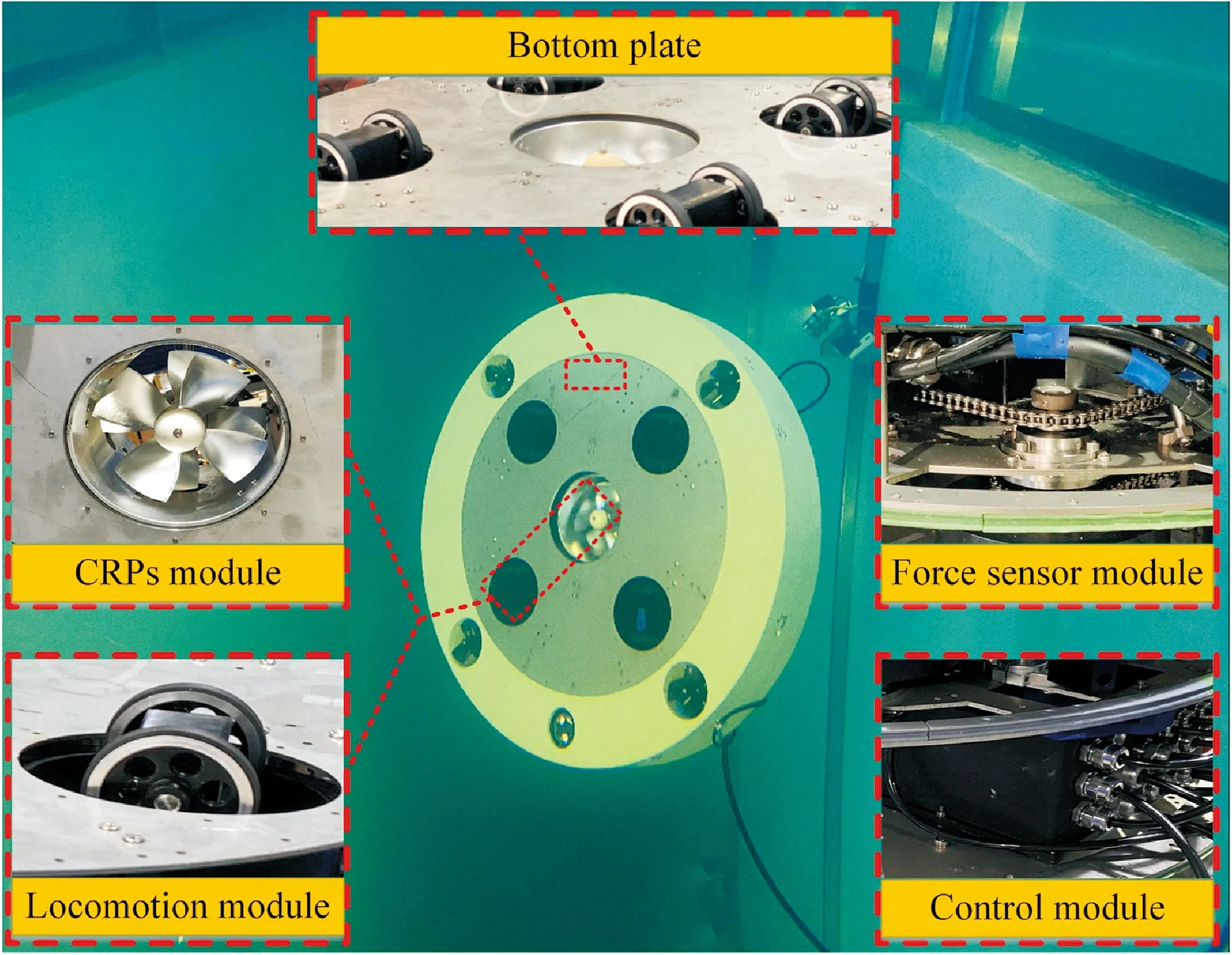
图12 爬壁机器人样机实验测试过程Fig.12 Experimental test of the developed robot
负压吸附方法不受限于吸附壁面的材料,有着广泛的应用;但离心风机噪声大,能耗高,标准化的零部件如电机等限制了爬壁机器人的小型化与轻量化,如果采用真空吸盘则需要连接真空压缩机,同时对于密封要求高,适用于平整壁面。
1.2 磁吸附
爬壁机器人磁吸附通常利用机载磁体对铁钴镍等一类物质壁面的吸引力作为吸附力,将机器人压在吸附面[18]。根据工程惯例,通常采用永磁体或电磁铁与钢质平面实现接触式或非接触式吸附。
文献[3]设计一款在钢制船体上作业的爬壁机器人,主要用于焊接,安装的2D激光扫描仪能够提供船体表面的信息并用于其他任务。与爬壁机器人之前相关工作相比,该机器人可实现长距离自主焊接。同时设计了基于激光反馈的控制律,使得机器人能够自主焊接多道焊缝。机器人系统结构、最终焊缝视觉效果分别如图13、14所示。
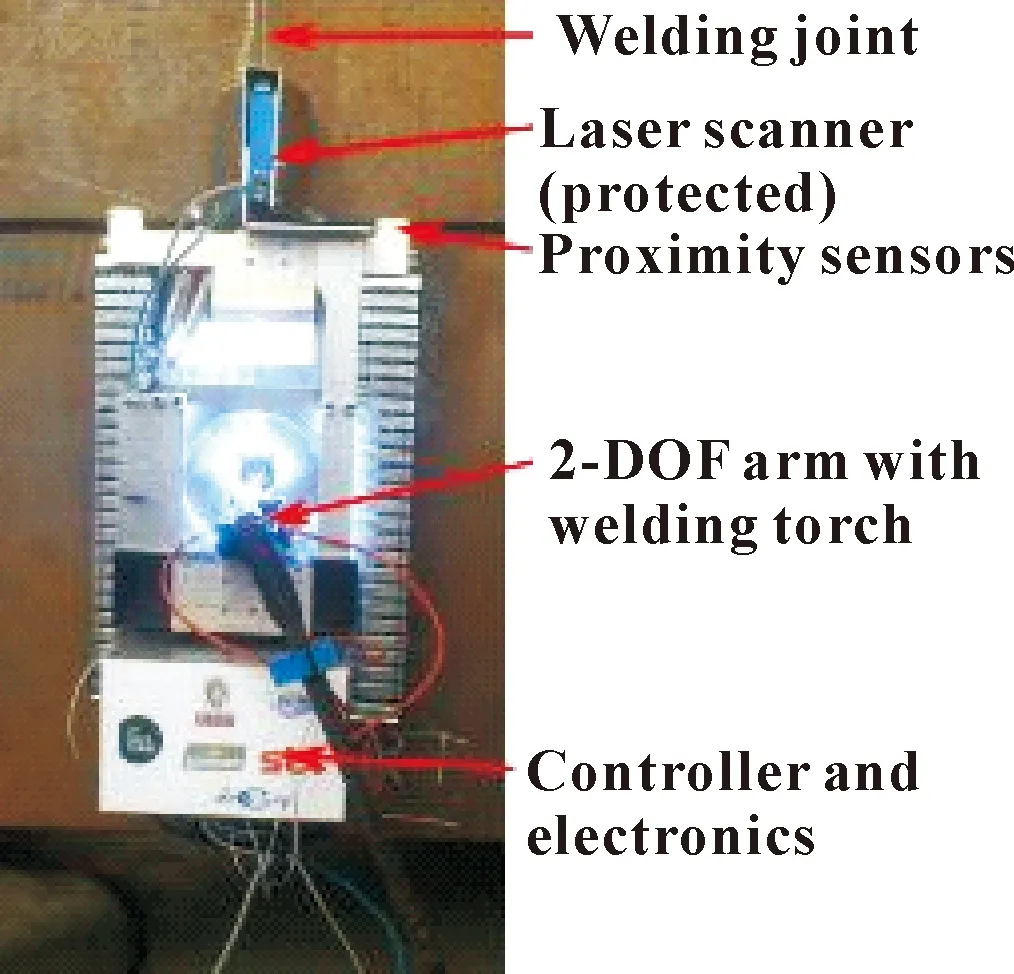
图13 吸附于钢质表面的爬壁机器人系统结构Fig.13 The structure of the wall-climbing robot system adsorbed on the steel surface
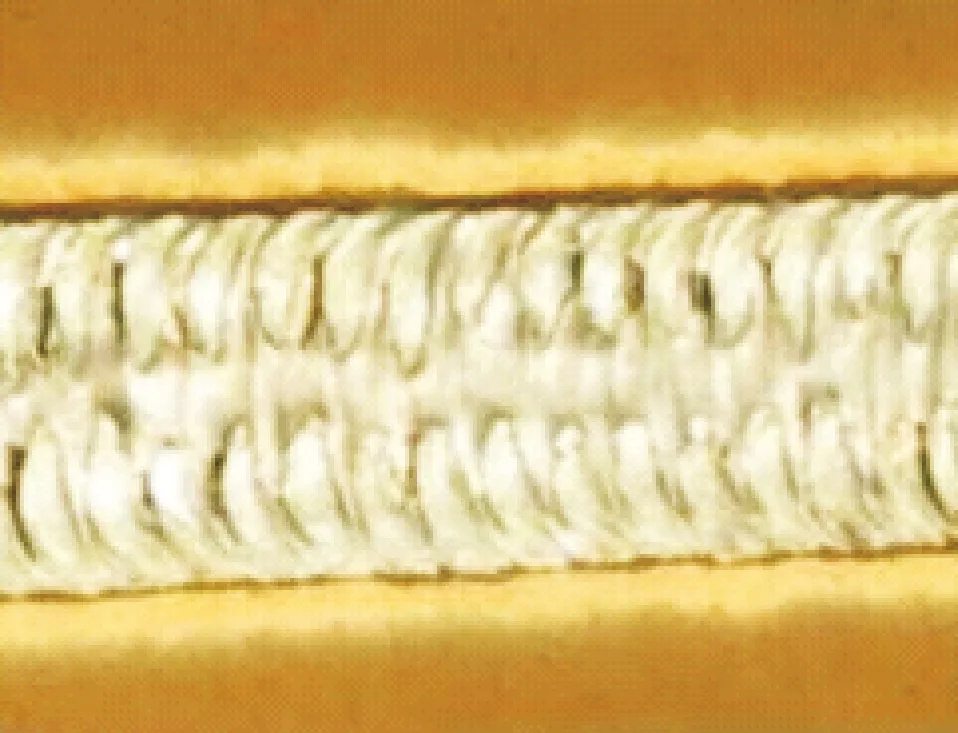
图14 最终焊缝视觉效果Fig.14 Visual result of the final weld
美国内华达大学ARA实验室在钢铁结构检测领域机器人的启发下提出并设计了能够跨越复杂表面结构的爬壁机器人[5],同时仍然保留爬壁机器人高效的行走能力。该爬壁机器人系统结构及在不同几何外形的钢质结构工作场景分别如图15、16所示。

图16 爬壁机器人在不同几何外形的钢质结构工作场景Fig.16 Wall-climbing robot working on steel structures with different geometric shapes
文献[19]设计一款用于钢筋混凝土建筑结构检测的爬壁机器人(见图17),它利用永磁体产生吸附力附着到壁面上,通过仿真及实验确定了最佳磁通量及磁体配置。机器人携带的探地雷达(Ground Penetrating Radar,GPR)传感器能检测钢筋腐蚀、混凝土保护层退化、混凝土分层。爬壁机器人结合定位系统和GPR实现轨迹规划,避开钢筋密度不足的区域从而保证吸附可靠性。机器人在水平及竖直壁面吸附工作场景分别如图18、19所示。

图17 爬壁机器人实体图片Fig.17 Climbing robot prototype

图18 爬壁机器人水平壁面吸附Fig.18 Horizontal wall adsorption of wall-climbing robot

图19 爬壁机器人竖直壁面吸附Fig.19 Vertical wall adsorption of wall-climbing robot
文献[20]设计并开发了一种轮式永磁吸附系统,通过对永磁体不同几何形状的建模及仿真确定了满足吸附力要求的设计方案并进行了实验(如图20所示)。该轮式永磁吸附系统与自主攀爬机器人结合实现垂直塔架的无损检测,如图21所示。

图20 吸附系统实验Fig.20 Adsorption system experiment:(a)testing with no air gap;(b)testing with a 0.7 mm air gap
传统船体检测机器人体积质量大,运动不便。为解决该问题,文献[4]设计一款轻量化船体检测爬壁机器人MIRA来提供船体在线视觉检测数据。为满足轻量化需求,设计新型聚氨酯柔性磁性车轮带,同时可以吸收冲击,保证运动平稳性,车轮带及机器人三维模型如图22所示。车轮带上的磁铁排列方式及数量可以调整以适应不同载荷。
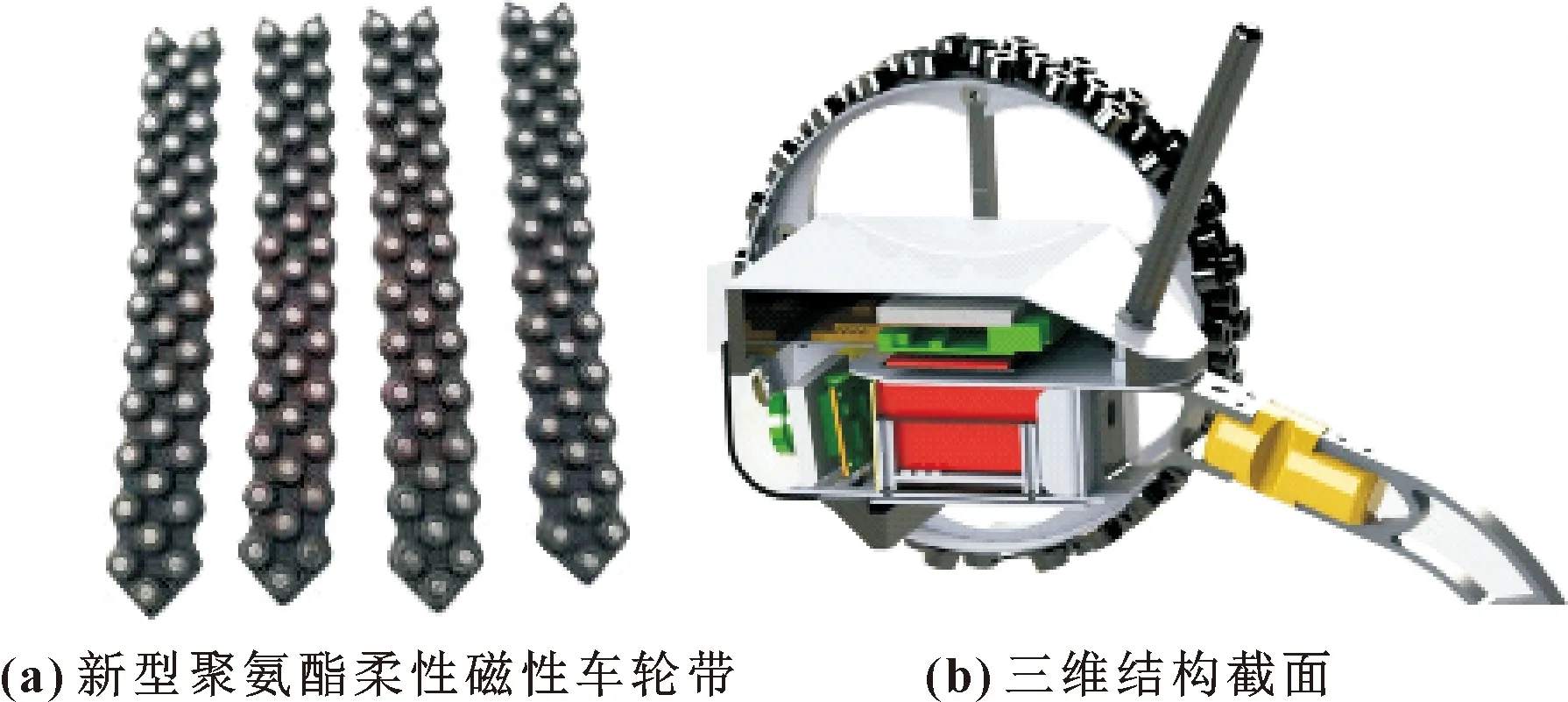
图22 爬壁机器人MIRAFig.22 Wall-climbing robot MIRA:(a)new-type polyurethane flexible magnetic wheel belt;(b)sectional view
磁吸附方法能够提供足够大的吸附力,同时对于吸附壁面适应性好;其缺点是只能用于铁钴镍等吸附壁面。
1.3 仿生吸附
随着爬壁机器人的发展,能效及应用场景的需求推动了新的吸附方式的应用。结合生物仿生学的发展,昆虫与爬行类动物的攀爬吸附方式受到学者的关注[21]。按照吸附环境,可以将仿生吸附分为干吸附和湿吸附。如图23所示,体重较大的通常有更大的足部毛发密度。
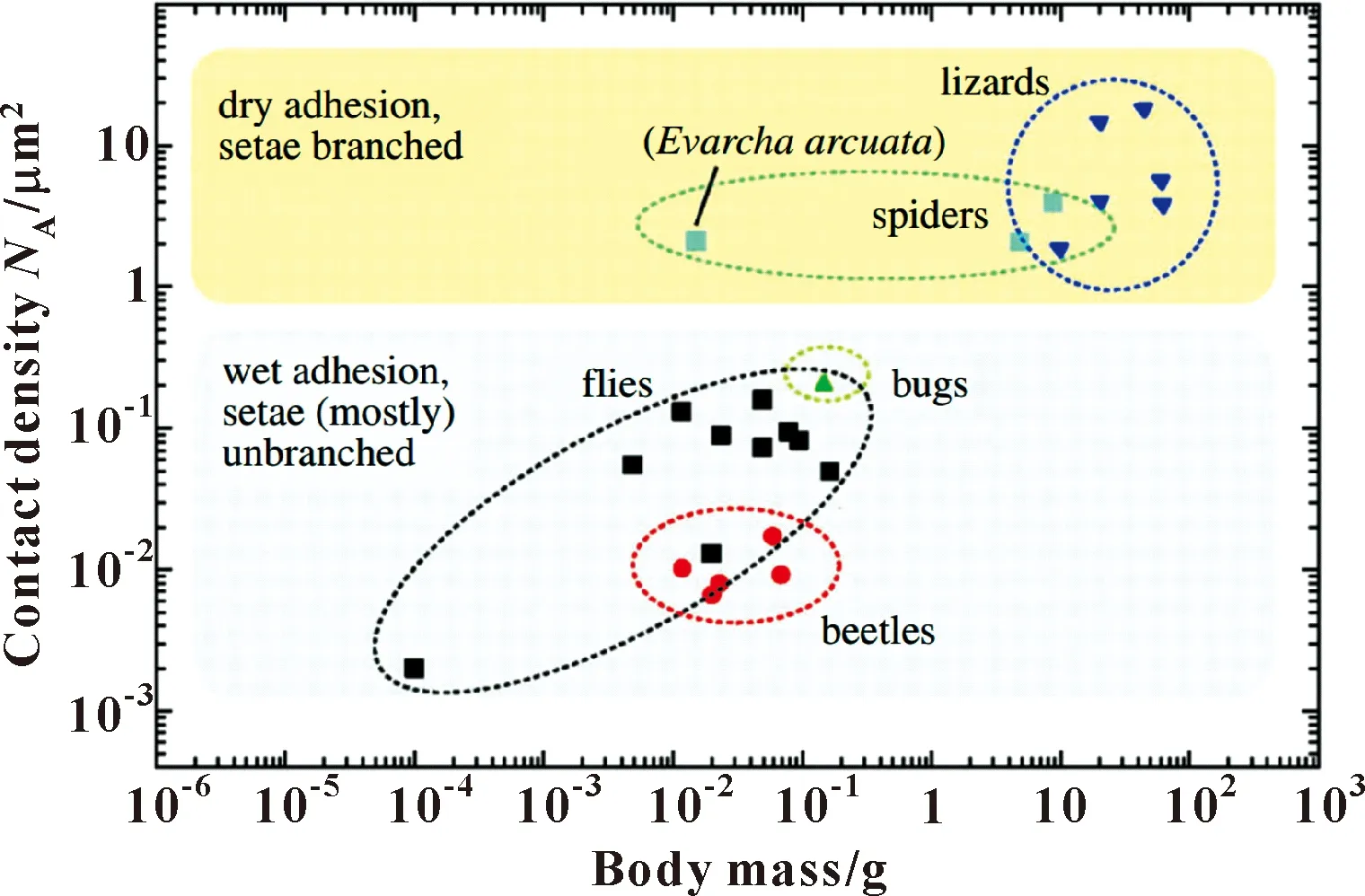
图23 昆虫和爬行类动物足部毛发密度与体重函数关系Fig.23 The relationship between density of contact points (NA)and animal body mass
1.3.1 干吸附
壁虎依靠足部的微/纳米纤维提供黏附力完成吸附及行走,这些微/纳米纤维依靠范德华力黏附到物体表面上[22-23]。壁虎黏附结构层次见图24。文献[24]介绍了Stickbot,一款受壁虎启发的爬壁机器人,如图25所示。该机器人通过柔顺结构、定向黏附及切向力控制实现黏附。在平衡足之间采用了与柔顺结构及定向黏附结合的力控制策略,从而促进足的平滑附着及分离。
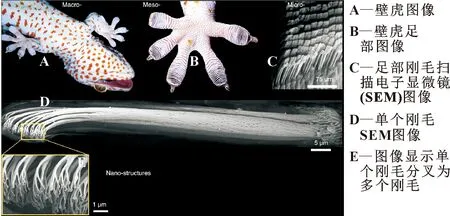
图24 壁虎黏附结构层次[25]Fig.24 Structural hierarchy of the gecko adhesive system[25]

图25 Stickbot:一款受生物启发的爬壁机器人Fig.25 Stickbot:a bio-inspired wall-climbing robot
文献[26]介绍一种基于干吸附原理的新型连杆爬壁机器人。基于连杆机构,机器人可以实现单个致动器驱动下的越障功能。机器人足部的黏性脚垫实现了机器人与壁面之间的粘合,脚垫制备过程如图26所示,实验前通过酒精清洗脚垫可以增加附着力。通过运动学和静力学分析确定了设计参数并完成了实验验证,在竖直行走过程中机器人最大越障高度为15 mm。
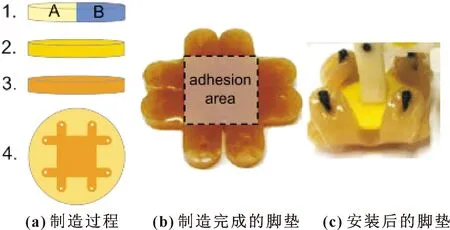
图26 机器人脚垫Fig.26 VytaFlex-10 elastomer and its fabrication methods: (a)fabrication process;(b)manufactured V-10 footpad;(c)assembled WCR footpad
文献[27]提出了两款小型爬壁机器人Geckobot和Waalbot,能够借助吸附材料在竖直光滑壁面实现附着及运动。它们都包含机载电源可以实现计算、无线通信及半自主操作。原型机如图27、28所示。Geckobot和Waalbot原型机可以分别攀爬85°和90°壁面,主要用于城市侦察任务。
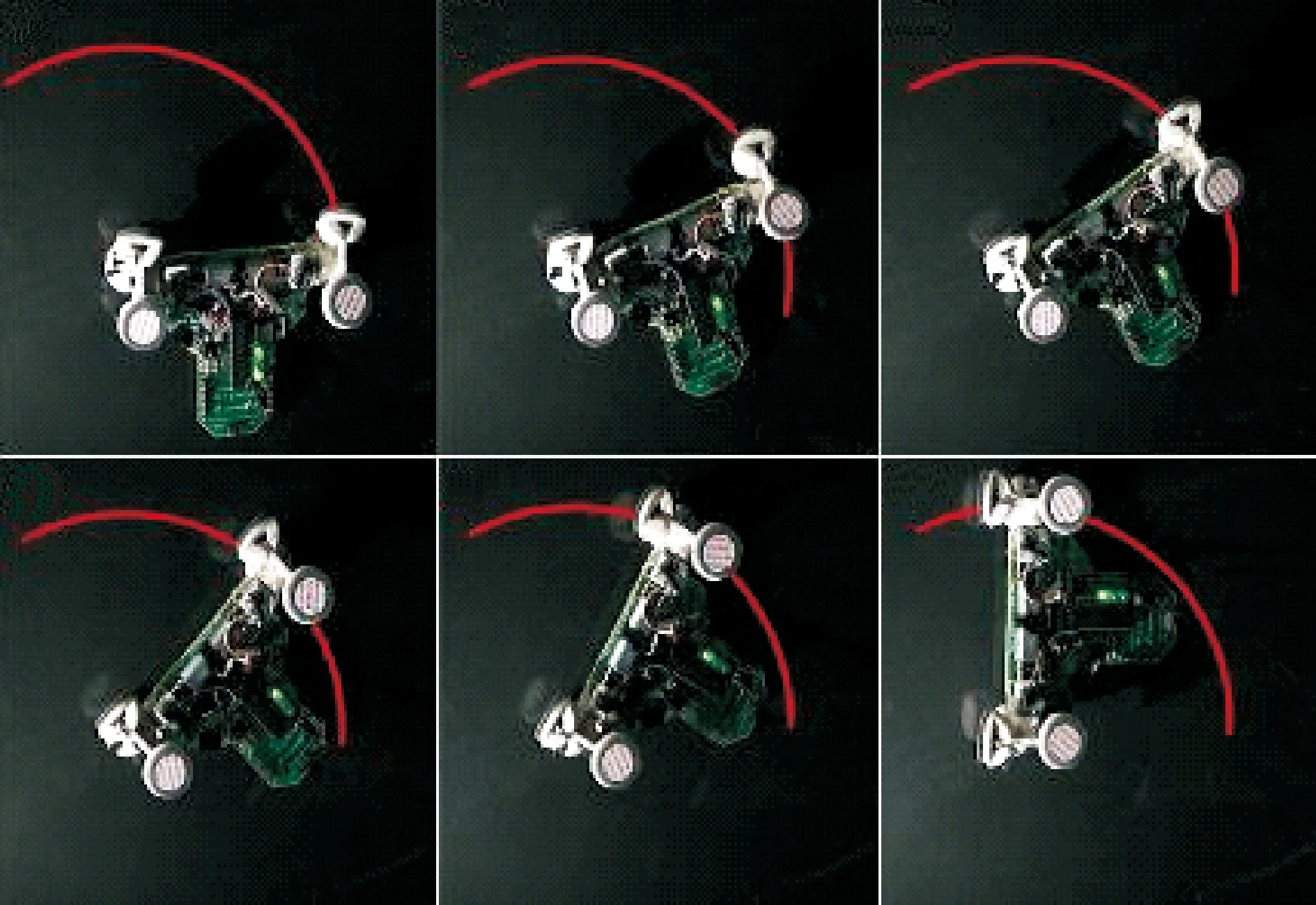
图28 Waalbot在垂直壁面转弯Fig.28 The prototype turns 90° (line overlayed)in six steps
文献[28]提出并设计一款爬壁机器人,Waalbot II。它能够在竖直墙面吸附并攀爬,负载达到自身重力的1.17倍。与Waalbot相比,Waalbot II攀爬能力进一步提高,能适应光滑与粗糙表面。机器人尺寸优化提升了有效载荷运载能力,自主吸附恢复提升了运动鲁棒性,并通过实验验证了Waalbot II的攀爬鲁棒性及负载能力。WaalbotII总装及在光滑垂直表面负载爬升场景如图29所示。
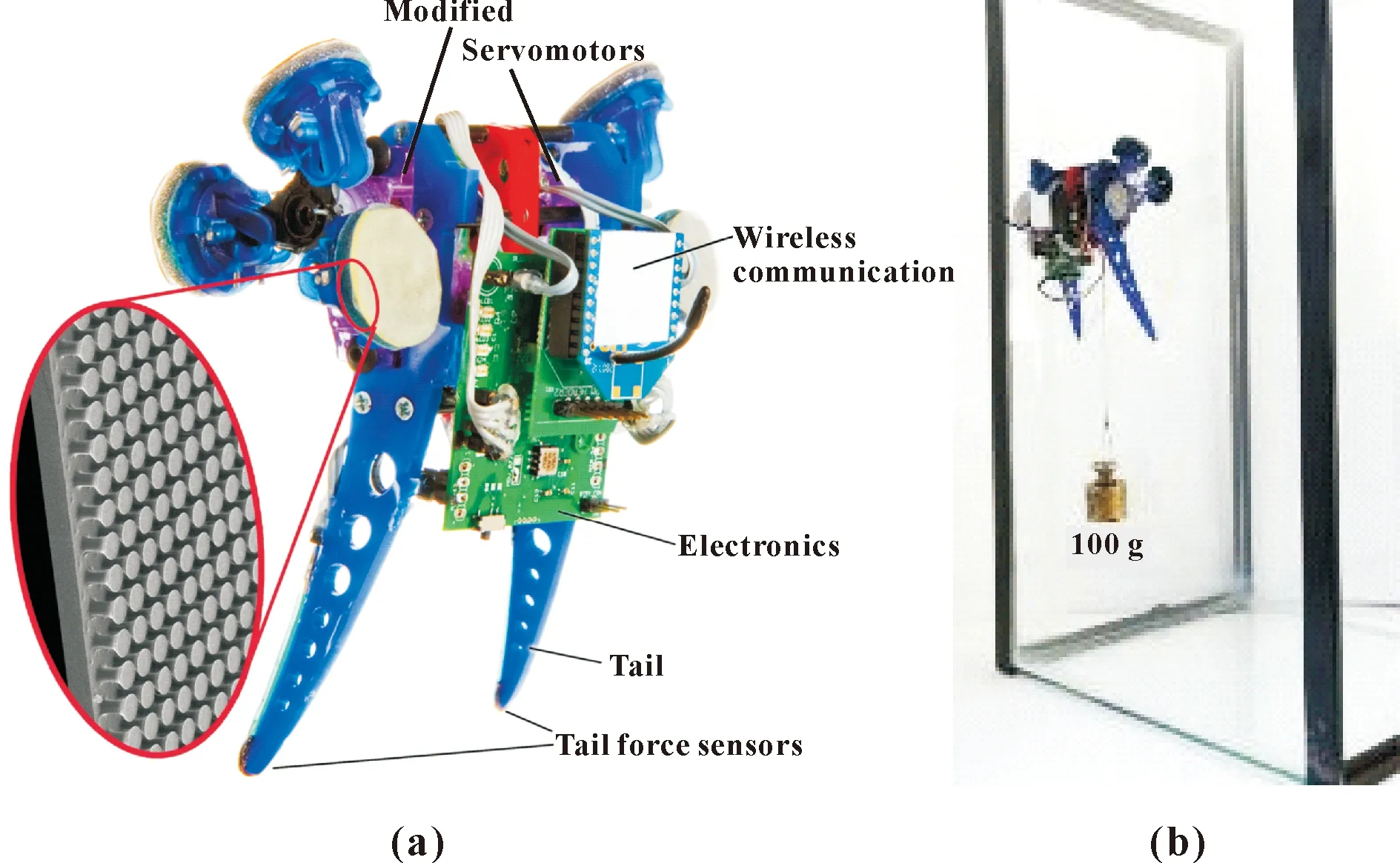
图29 WaalbotII总装(a)及光滑垂直壁面负载爬升场景(b)Fig.29 WaalbotII final assembly(a)and smooth vertical wall load climbing scene (b)
1.3.2 湿吸附
文献[29]介绍了一种四足机器人,可以在天花板和墙壁行走,同时由于机器人表面纳米材料出色的防水性能,使得机器人可以在下雨或潮湿环境中大范围移动。该机器人是使用快速、便捷且环保的3D打印技术制造的;采用了Hoekens连杆作为移动机构,蘑菇形微柱黏附足模块作为机器人的高效吸附机构,实验证明了机器人在垂直墙壁和天花板稳定行走及攀爬的可靠性。机器人俯视图、仰视图、足部结构侧视图、足部蘑菇形微柱电镜图如图30所示。
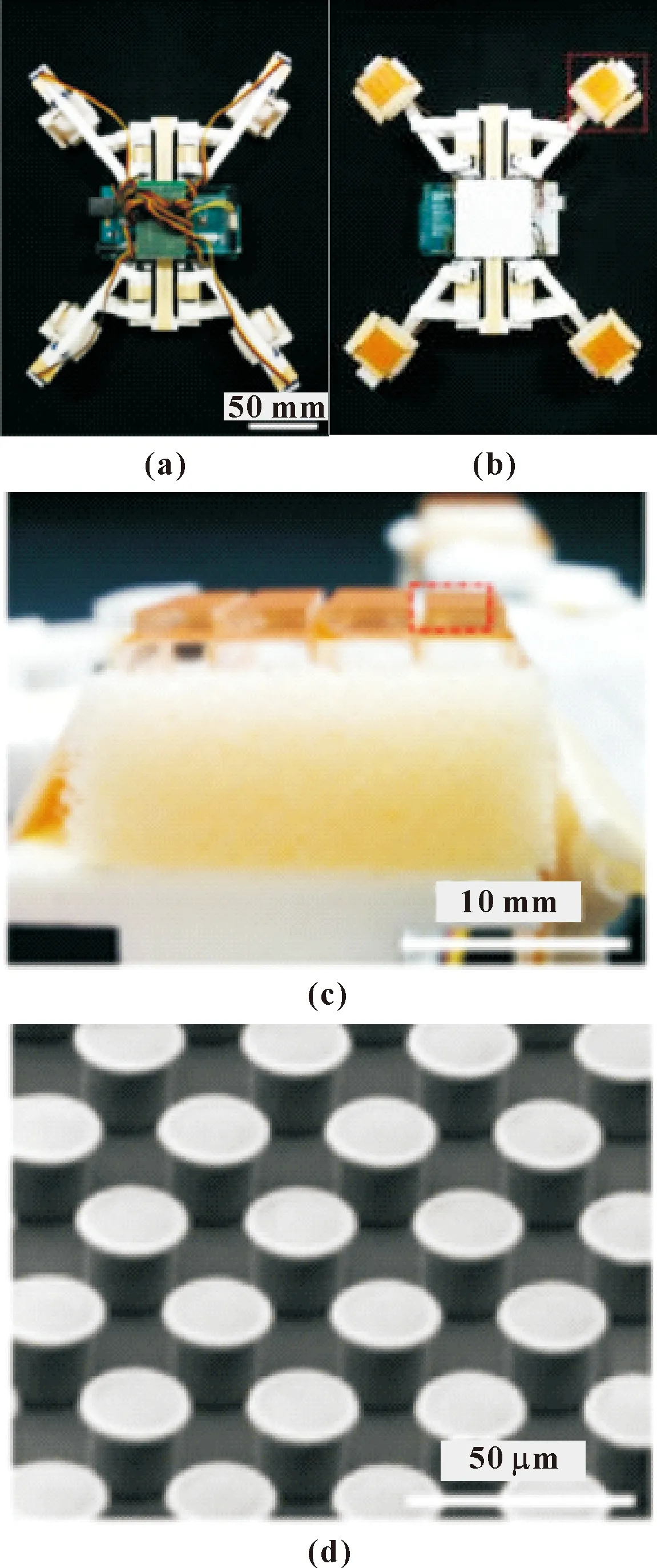
图30 机器人俯视图(a),仰视图(b),足部结构侧视 图(c)及足部蘑菇形微柱电镜图(d)Fig.30 Robot top view(a),bottom view(b),side view of the multilayered foot structure(c)and an SEM image of the adhesive foot pad with mushroom- shaped micropillars(d)
受海胆管足启发,文献[30]提出一种水下爬行机器人的吸附机制,通过软吸盘和化学吸附材料结合实现。此吸附机构能适应粗糙表面且稳定性高。此外吸盘结构简单、易于制造同时满足微型机器人的轻量化要求。受生物启发的软吸盘结构如图31所示,吸盘工作示意如图32所示。
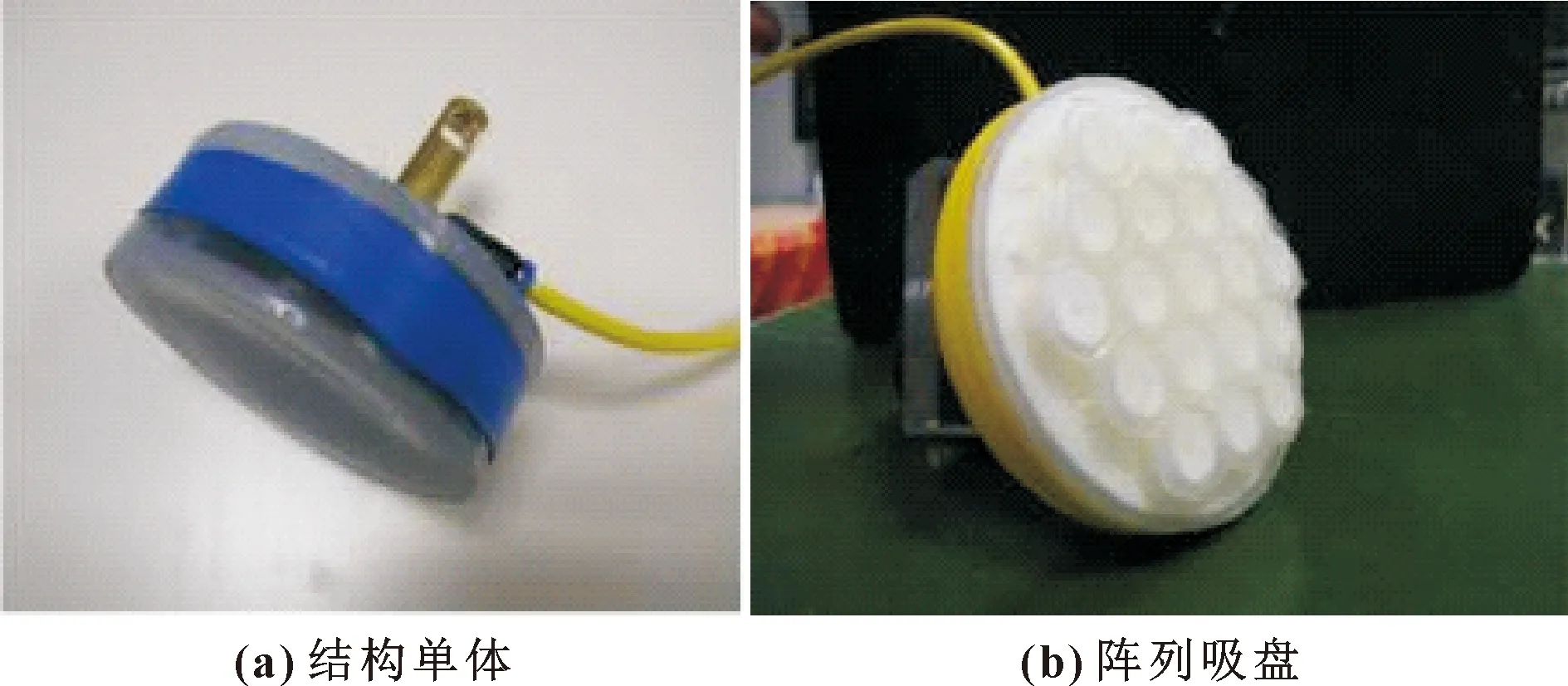
图31 受生物启发的软吸盘Fig.31 Bio-inspired soft sucker prototypes:(a)single sucker;(b)arrayed sucker
文献[31]提出了一种可以在水下工作的气驱动仿生软吸附驱动器,它由双层软质结构组成,空腔顶层的嵌入式螺旋气道充入气体后变形为稳定的3D圆顶形状,从而在空腔中实现负压,如图33所示。所提出的软吸附驱动器可在多种类型的光滑和半光滑表面上完成快速稳定且可逆吸附。在软吸附驱动器基础上设计并制作了一种新型负重两栖爬行柔性机器人(ACSR)。
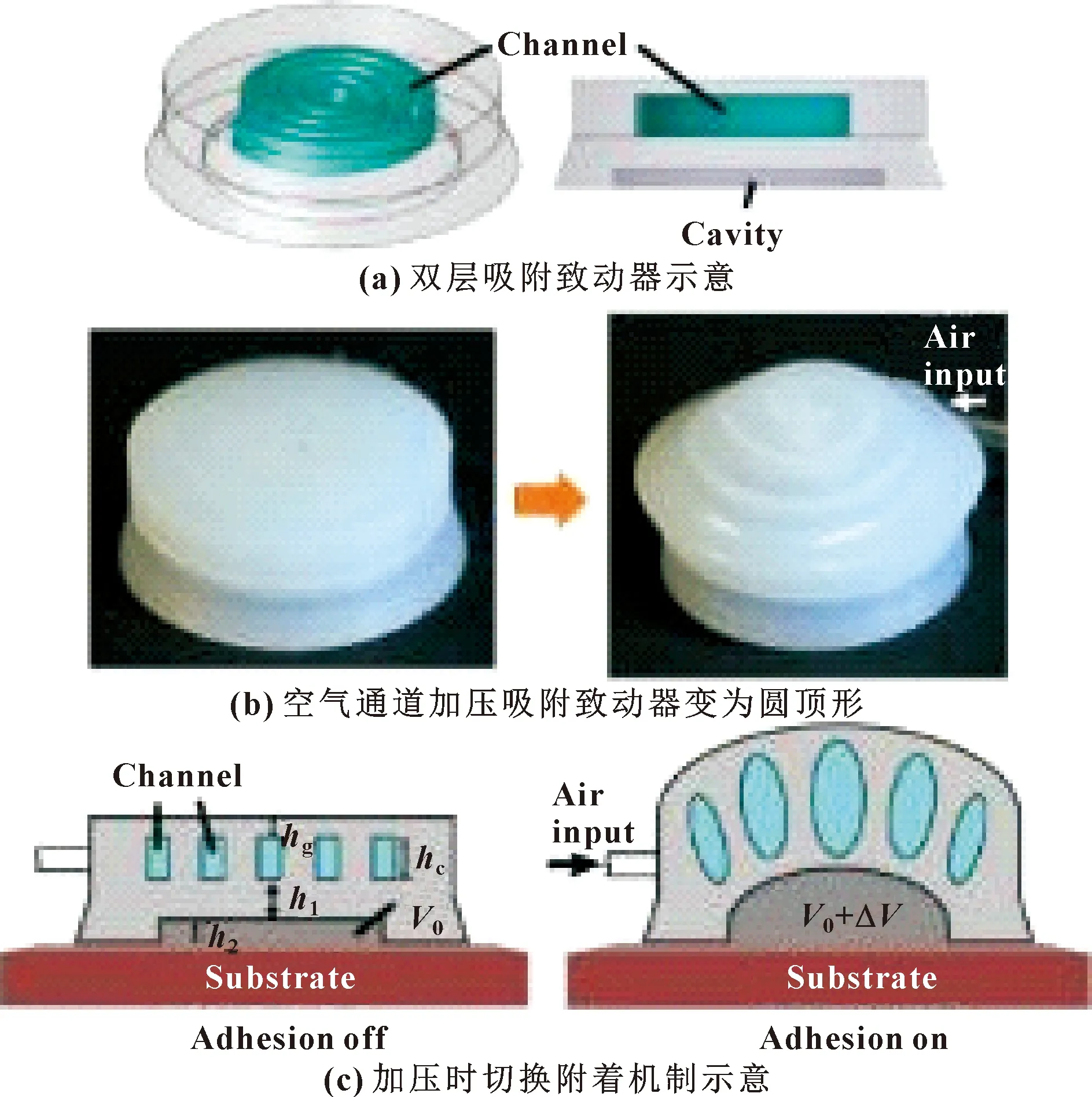
图33 仿生软吸附驱动器Fig.33 Bionic soft adsorption actuator:(a)double-layer adsorption actuator;(b)the adsorption actuator becomes dome-shaped when the air channel is pressurized;(c)switching attachment mechanism when pressurized
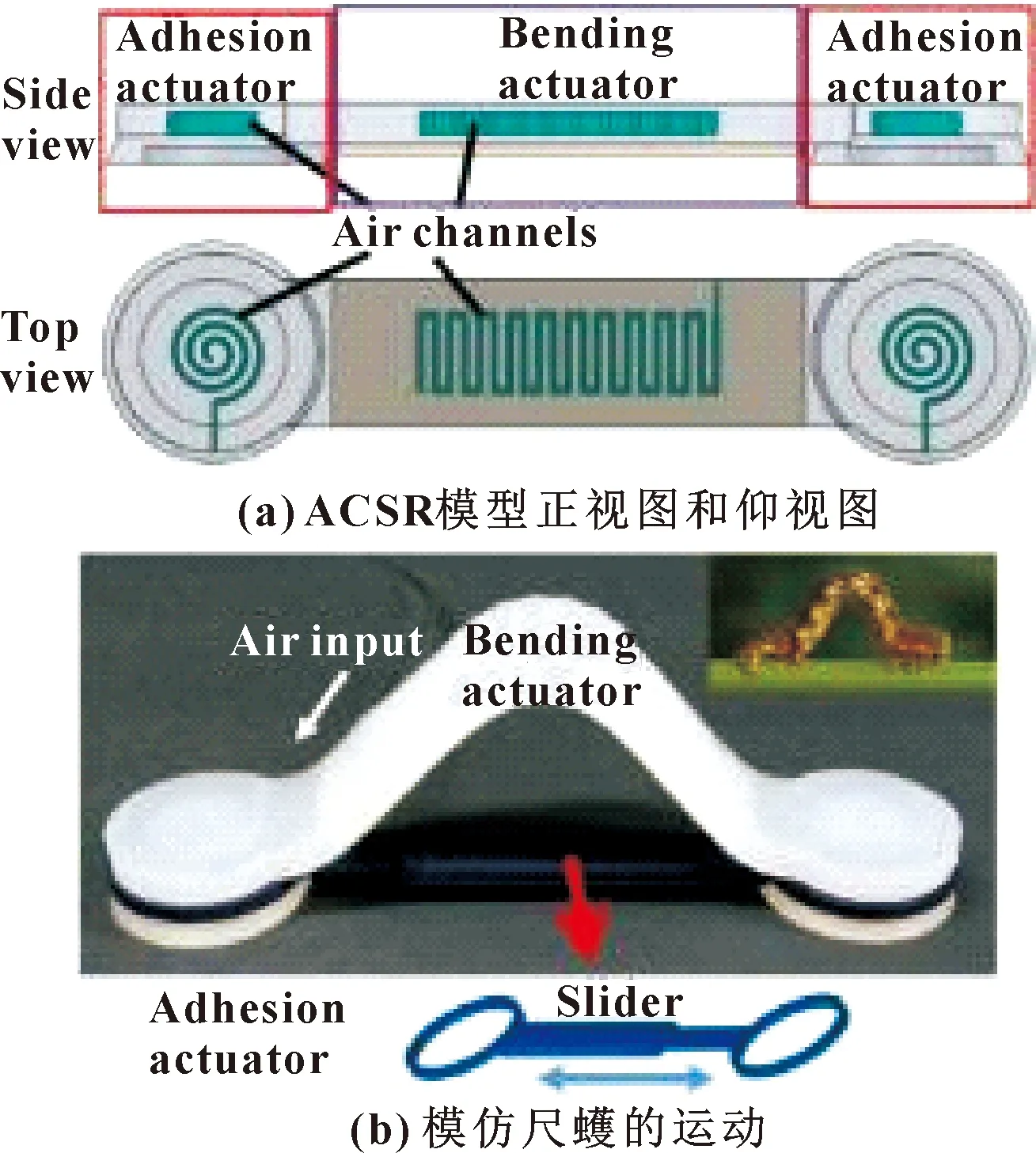
图34 ACSR结构Fig.34 Design of ACSR:(a)side view and top view;(b) mimic the locomotion of an inchworm
仿生吸附对于不同壁面有很强的适应性,能耗低且易于实现机器人小型化及轻量化;其缺点是仿生吸附结构设计及制备工艺复杂且成本高,机器人绝对负载能力小,同时需要定期保养维护。
1.4 静电吸附
静电吸附是由于电荷不平衡分布导致不同物体正负电荷之间的吸引而产生的吸附作用,最常见的如平行极板电容,电源引起正负电极板正负电荷分布不均衡而产生吸附力,如图35所示。
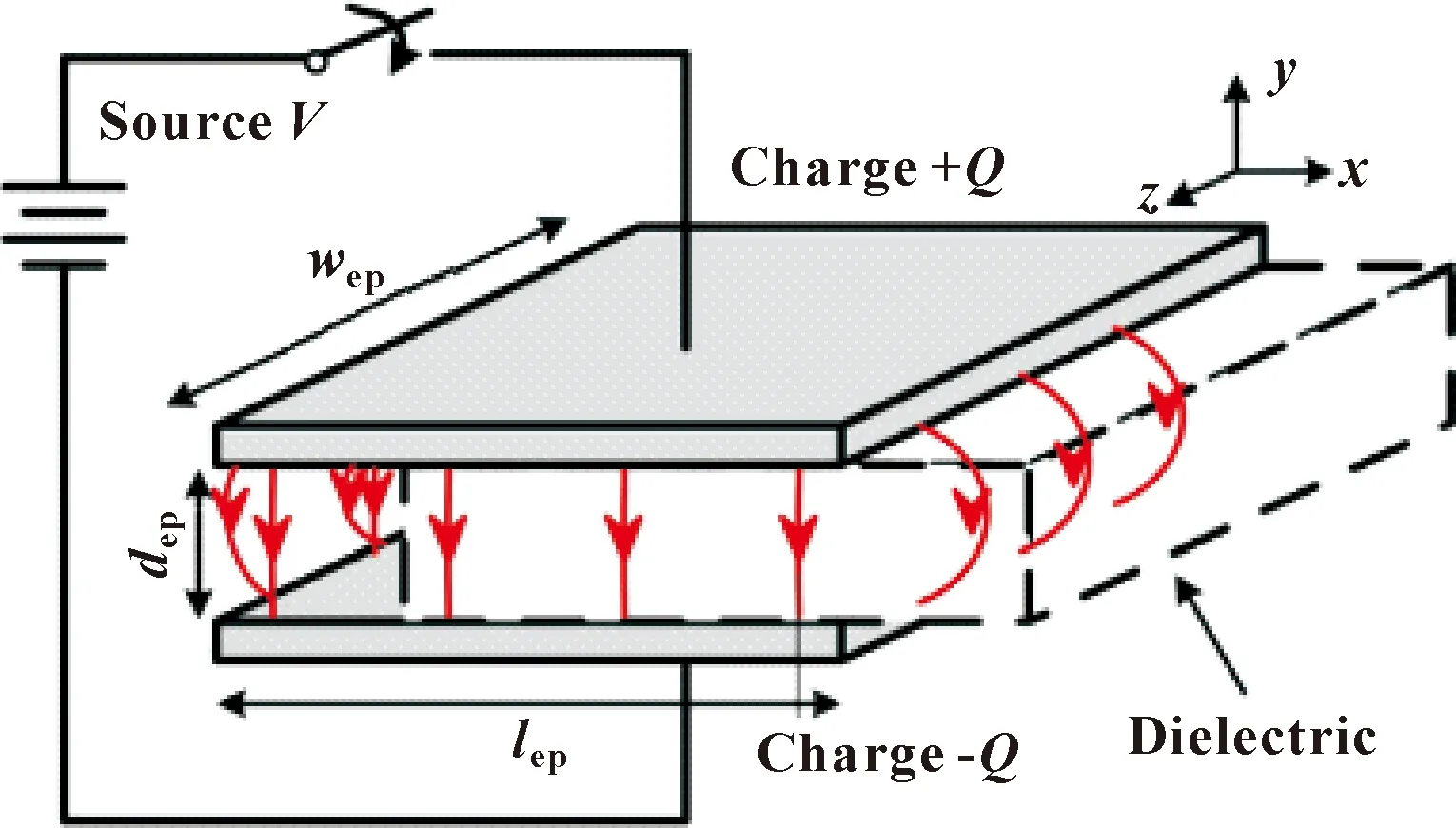
图35 平行极板电容Fig.35 Parallel plate capacitor
由于静电吸附性能上的优势,文献[32]选择静电吸附方式设计爬壁机器人,对平行面及边缘电场模型进行讨论,分析了介电脚垫电压参数、几何外形、材料特性、吸附壁面柔顺性等对吸附力影响。
文献[33]提出并设计一种在无特征表面攀爬的爬壁机器人(ELAD),由于静电吸附可以通过软质弹性材料作为电介质实现对剥离力的抵抗,因此提出一种使用刀片涂层技术的层状混杂胶黏剂多阶段制备新工艺,制造了表面柔顺、电激励且几何可控的履带结构。当受到高电压激励时,履带成为有源致动器。受壁虎爬行策略启发,设计了结合静电吸附履带与扭簧尾部结构的爬壁机器人。实验结果证明:爬壁机器人能够在粗糙度300 nm以上平面工作超过2 h。爬壁机器人履带、三维模型及工作场景见图36。
文献[34]提出一种新型可控吸附机制,结合了静电吸附和仿生干吸附的优点。仿生干吸附使得静电吸附胶黏剂更贴近壁面从而增加胶黏剂吸附效果,同时静电吸附有助于更多的仿生干吸附结构作用于吸附表面,对于粗糙表面效果更为明显。混合静电仿生干吸附胶黏剂结构示意如图37所示。文献[34]介绍了新型混合胶黏剂的制备工艺并在不同粗糙度瓷砖上进行了实验来量化对吸附力的影响。实验表明混合胶黏剂能比仅使用静电吸附或仿生干吸附提供更大的吸附力。

图37 混合静电仿生干吸附胶黏剂结构示意Fig.37 Structure of hybrid electrostatic bionic dry adsorption adhesive
静电吸附应用广泛,结构简单、轻量化,易于实现机器人小型化,能耗低且不受限于吸附壁面材料;其缺点在于绝对负载能力小,运动能力欠佳。
1.5 热熔吸附
爬壁机器人在非结构环境中以大吸附力实现强爬升是一个难点问题。大吸附力的控制与爬壁机器人运动性能息息相关。文献[35]提出一种利用热熔吸附(Hot Melt Adhesive,HMA)实现机器人自主攀爬的新方法。HMA通过控制材料温度改变黏附力大小,被认为是一种经济的解决方案。结合竖直壁面的运动场景及HMA材料基本特性,文献[35]提出了一种利用HMA材料实现爬壁机器人(见图38)与壁面吸附及分离控制方法,伺服电机及热控制模块可以主动改变HMA材料温度。爬壁机器人三维空间攀爬运动策略如图39所示。实验结果验证了热熔吸附的有效性及爬壁机器人的整体性能。
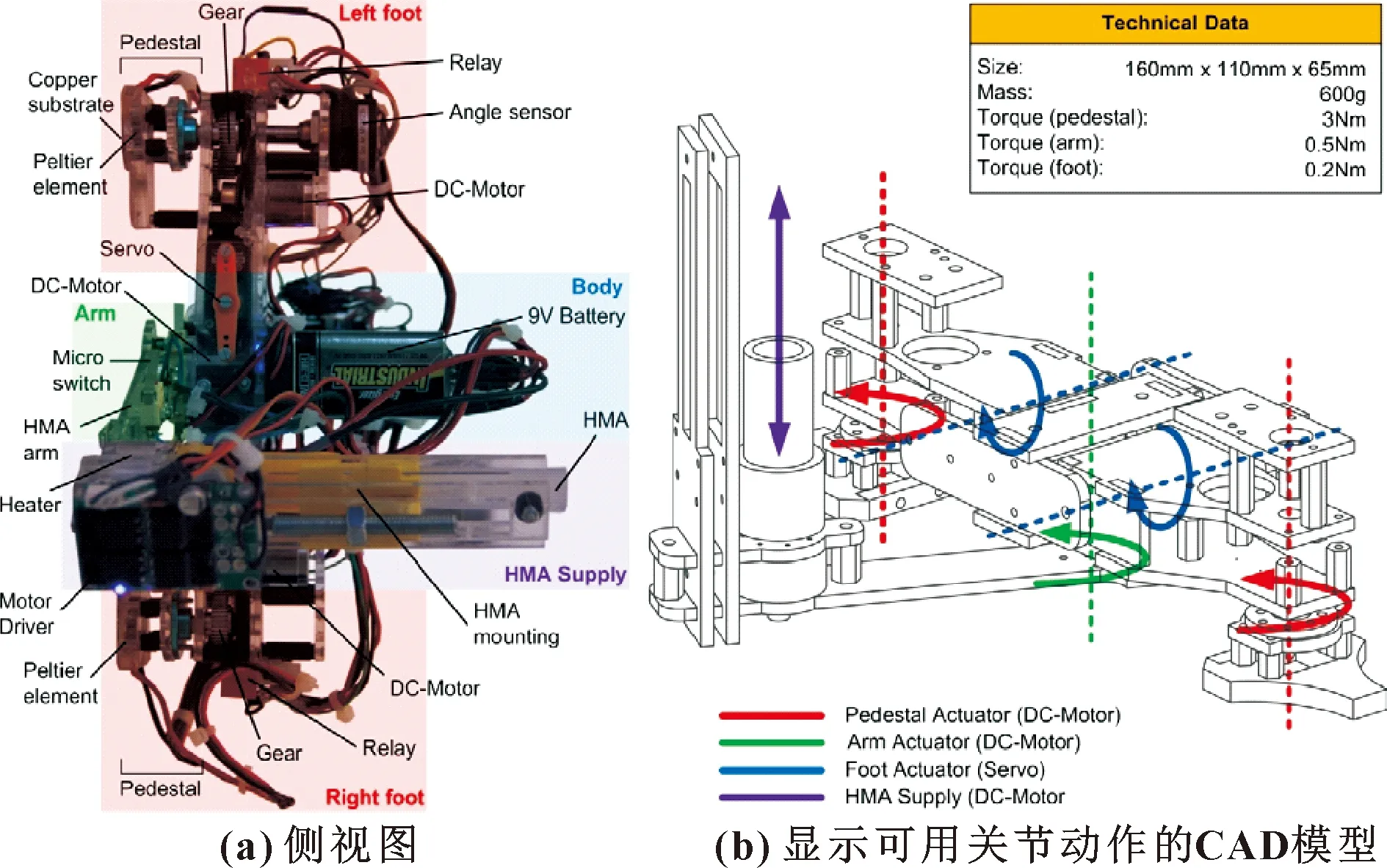
图38 HMA机器人Fig.38 HMA robot:(a)side view;(b)CAD model showing available joint actions
热熔吸附对于不同结构的吸附壁面有着良好的适应性,且成本低;其缺点是对于温度的依赖导致其吸附及分离耗时长、能耗高,且在吸附表面会有热熔材料残留,不适用对机器人运动性能要求高的场景。
1.6 振动吸附
振动吸附方式由北京航空航天大学机器人研究所受吸盘启发而提出[36]。吸盘在吸附过程中外界空气进入后会逐渐导致吸附失效,将其取下重新按压则会再次附着。当振动机构连接吸盘周期性拉起、放下吸盘时,则能够保证吸盘长时间稳定吸附于壁面。
文献[37]提出基于振动吸附机制的仿壁虎爬壁机器人。依据振动吸附理论,振动吸附模块被设计为仿壁虎爬壁机器人的足(如图40所示)。通过同时结合振动吸附方式的优势及壁虎爬行步态,爬壁机器人实现了稳定的运动、负载及抗倾覆能力。实验结果证明了机器人的吸附及攀爬能力,该爬壁机器人可以用于维修、清洁等场景。
振动吸附效果较好,运动性能及对吸附壁面的适应性好;其缺点包括能耗效率低,吸附结构的偏置容易引起非运动方向的偏移,同时标准化的零部件会限制机器人结构的小型化、轻量化。
2 机器人吸附方式关键技术分析
作为爬壁机器人核心功能模块,吸附方式影响着机器人的吸附、运动、载荷、工作、鲁棒性等诸多方面。提升爬壁机器人吸附性能对于机器人性能提升具有重大意义。下面围绕吸附方式的关键技术进行分析。
2.1 吸附方式与运动方式的权衡
爬壁机器人的运动性能是实现其功能的基础,吸附方式对于运动性能影响不容忽视。按照吸附功能模块与运动功能模块的关系可以将爬壁机器人分为两类:一类是运动功能模块与吸附功能模块存在结构耦合,吸附及运动功能实现依赖同一结构,例如爬行类仿生机器人蜥蜴、壁虎等;另外一类是运动功能模块与吸附功能模块不存在结构耦合,分别由独立的模块实现吸附与运动,例如负压轮式爬壁机器人。
对于运动功能模块与吸附功能模块存在结构耦合的机器人而言,运动过程会引起吸附状态的变化,因此需要考虑运动状态下吸附稳定性;而吸附状态切换是否迅速则影响运动性能。两功能模块的耦合有利于机器人结构的小型化与轻量化,但是也引入了结构设计、运动控制的复杂性。因此在设计机器人时往往需要针对应用场景对机器人吸附方式与运动方式综合考虑、权衡。
2.2 关键零部件定制化设计
目前,监控侦察、特殊地形应用场合对爬壁机器人小型化、轻量化设计提出了新的要求。但在机器人的设计过程中,轻量化、小型化设计目标的实现往往受到标准关键零部件的制约。例如常用到的离心风机、电机、传动部件、控制电路、摄像头等往往难以满足机器人的设计要求,此时可以借助关键零部件定制化设计来解决,但这也带来设计成本的增加。
2.3 理论分析及仿真分析支撑下的优化设计
爬壁机器人设计、加工、装配、调试、交付使用周期长,其中某环节出现异常会对后续环节造成不可逆的影响,面对高昂的成本,设计环节的仿真至关重要。现实中由于对理论模型建模的偏差或使用场景的了解不足常常导致仿真结果与实验结果存在较大偏差。针对这个问题,应提升理论模型建模准确性并进一步明确使用工况,使得仿真有效指导设计环节并持续优化。
2.4 新材料的研发与制备工艺流程简化
新材料的研发为爬壁机器人注入了新的设计灵感与思路,借助新材料可以更好地实现仿生爬壁机器人小型化、轻量化设计。但由于新材料成本高昂及繁杂的制备工艺流程,它在爬壁机器人吸附模块设计中应用受限。因此简化新材料制备工艺流程,降低成本,进一步推广新材料在爬壁机器人吸附技术领域的应用是新材料助力爬壁机器人技术发展的重要一环。
3 结语
随着科技的不断进步,爬壁机器人吸附方法总体上向着使爬壁机器人小型化、轻量化、大载荷的方向发展。基于爬壁机器人的不同应用场景,结合不同的吸附方式特定优缺点做出适当的选择,同时加强理论分析建模、仿真分析对于设计环节的支撑,通过关键零部件的定制化设计、结合新材料等对爬壁机器人设计进行优化,最终达到稳定吸附、敏捷运动、轻量化、大载荷的设计效果。
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
力学学报(2022年6期)2022-07-10
精密成形工程(2022年2期)2022-02-22
中国特种设备安全(2021年12期)2021-04-26
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
浙江大学学报(工学版)(2016年11期)2016-06-05
广东石油化工学院学报(2016年6期)2016-05-17
专用汽车(2016年1期)2016-03-01
专用汽车(2015年4期)2015-03-01
