
改进非局部均值滤波在图像降噪处理中的应用
2023-12-02 02:09贾超贤
太原学院学报(自然科学版) 2023年4期
戚 伟,贾超贤,李 洁
(1.淮南职业技术学院 智能与电气工程学院,安徽 淮南 232001;2.中国矿业大学 计算机科学与技术学院,江苏 徐州 221116;3.安徽理工大学 计算机科学与工程学院,安徽 淮南 232001)
图像降噪是图像处理领域的关键问题,只有将含噪图像中的噪声有效滤除,才能够提升图像的视觉效果,同时为后续图像分割、定位等提供保障[1]。常用的降噪方法有均值滤波法、中值滤波法、非局部均值滤波法,其中非局部均值滤波法在保留图像细节、提高降噪图像清晰度方面具有更大的优势,引起了学术界的广泛关注。龙超等[2]结合相似框架矩阵最大特征值和像素间欧式距离的自相似性提出了特征融合的非局部均值降噪法,并将其应用于CT图像降噪中,峰值信噪比平均提高了4 dB。为保留图像细节,於平[3]将非局部均值滤波法和模糊边缘补足图像修正算法相结合,并将其应用于花朵图像降噪中,取得了较为理想的降噪效果。张劲松等[4]指出传统非局部均值滤波法未考虑噪声的差异性和特殊性,提出了适用于去除椒盐噪声的自适应非局部均值滤波法,该方法采用无噪声区域的局部均值来查找和提取噪声点,从而实现对噪声点的精准重构。前人的研究主要是将其它算法和非局部均值滤波进行联合降噪,而缺少对算法本身的改进。本文在前人的基础上,对非局部均值滤波法进行改进,并应用于Lena图像和合成孔径雷达图像中,通过和其它算法的对比来验证算法的有效性。
1 非局部均值滤波算法及改进
1.1 非局部均值滤波
根据目标像素和周围像素、整幅图像像素之间存在的相关性,BUADES et al提出了非局部均值滤波法,该方法能够确保图像细节不丢失,同时降噪后图像也具有比较高的清晰度,在实际中具有广泛的应用[5]。不妨设I={I(x,y)|x,y∈S}为含噪图像,通过对I中其它像素的加权平均得到降噪后图像O(i,j),即
(1)
式中:ω(x,y)为相似权重系数;i、j、x、y为像素索引值。
非局部均值滤波要在图像中科学设置搜索框和相似框,然后在搜索框范围内滑动相似框,计算邻域的相似性。根据相似性来确定像素在搜索框的权值,具体如图1所示。

图1 非局部均值算法示意
非局部均值算法的核心是计算相似权重系数ω(x,y),采用欧氏距离来量化图像块之间的相似程度。搜索框像素点y和中心像素点x的欧氏距离d(x,y)为[6]
(2)
式中:V(x)、V(y)分别为搜索框内以x、y为中心像素点的相似图像块灰度值;W为相似框的边长。
由像素点的欧式距离可以得到相似权重系数ω(x,y),即
(3)
式中:h为滤波系数;M(x)为归一化系数,其数学表达式为
(4)
式中,L为搜索框边长。
采用非局部均值滤波进行图像降噪的流程如图2所示[7]。

图2 非局部均值滤波图像降噪流程
1.2 非局部均值滤波改进
通过对非局部均值滤波算法的分析可知,其每次运算均要对整个相似域遍历一次,这使得算法的运行时间比较长,图像降噪效率低。基于积分图像对传统非局部均值滤波算法进行改进,提升算法运行的效率[8]。一次性计算含噪图像中所有点偏离坐标点方向的权重,采用积分图获得计算的结果,避免了重复性计算,减少存储的时间。积分图原理如图3所示。

图3 积分图原理
由于图像是由一系列的离散像素点所组成,对图像积分就是像素点灰度值求和,即图像中任意一点积分值为灰度图左上角和当前点所围成矩形区域内像素点灰度值和。对图3(a),其ii(a,b)为
(5)
式中,i(x,y)为阴影矩形区域内像素点灰度值。
对于任意大小矩形区域,其积分值ii为
(6)
由此可见,通过4次计算获得积分值,大大减少了计算的工作量,使得图像降噪的效率大大提升。
另外,非局部均值滤波进行像素相似加权时没有考虑非相似像素加权对降噪效果所产生的影响。为了提高图像降噪的质量,在高斯加权之前采用相似因子X(x,y)对相似框中心像素点的相似性进行判断。相似因子X(x,y)计算公式为
X(x,y)=sgn(r(x,y)+1)
(7)
当V(x)≠V(y)时,
(8)
当V(x)=V(y)时,
r(x,y)=0
(9)
式中:sgn(·)为符号函数;η为像素相似性判断阈值。
人眼在不同灰度级数下的正确分辨率不同,选择η=64,计算得到相似因子X(x,y)为
(10)
当X(x,y)=1时,像素点相似;当X(x,y)=0时,像素点不相似。
对像素点进行相似矩阵判断之后,将相似像素点高斯加权。图像在数字化后是一个矩阵,其矩阵最大特征值反映了图像最大特征的重要度,因此考虑将欧式距离特征和相似框架最大特征进行融合,得到新的 相似权重系数。为了区分,将像素点欧式距离得到的相似权重系数记为ωs(x,y),即
(11)
相似框架最大特征高斯加权系数记为ωe(x,y),其数学表达式为
(12)
式中:Me(x)为最大特征值相似性归一化系数;eig(x,y)为最大特征值的相似性,其数学表达式为
eig(x,y)=‖λmax(X(x)W)|-λmax(Y(y)W)‖-1
(13)
式中:λmax为像素矩阵最大特征值;X(x)W、Y(y)W分别为以像素点x、y为中心,大小为W×W的像素矩阵。
由此可见,X(x)W与Y(y)W最大特征值差值绝对值越大,相似框包含图像的特征越不相似;X(x)W与Y(y)W最大特征值差值绝对值越小,相似框包含图像的特征越相似。将像素点欧式距离得到的相似权重系数ωs(x,y)和相似框架最大特征高斯加权系数ωe(x,y)融合,得到相似权重系数ω(x,y),即
(14)
2 实例分析
2.1 图像降噪评价指标
图像降噪评价常用峰值信噪比(peak signal to noise ratio,PSNR)、等效视数(equivalent numbers of looks,ENL)、边缘保持指数(edge keep index,EKI)来评价[9]。峰值信噪比计算公式为
(15)
式中:Oi为降噪后图像;Ui为无噪声图像;L为像素点总数。
峰值信噪比从整体上反映了图像的降噪效果,Rpsn值越大,图像降噪效果越理想;Rpsn值越小,图像降噪效果越差。
等效视数的计算公式为
(16)
式中:μ为像素均值;σ为像素标准差。
等效视数反映的是图像降噪后在图像平坦区域噪声平滑的程度,Len值越大,噪声平滑越彻底,图像降噪效果越佳;Len值越小,噪声平滑不彻底,图像降噪效果越差。
边缘保持指数的计算公式为
(17)
式中:G(wi)、G′(wi)分别为有边缘存在的同一窗口降噪前后图像灰度值梯度最大值;N为样本窗口个数。
边缘保持指数反映的是图像降噪前后图像边缘的恢复程度,其值越接近1,算法对图像边缘保持的性能越佳。
2.2 图像降噪结果分析
2.2.1Lena图像
选择Lena图像作为案例[10],加入标准差为10的噪声,分别采用非局部均值滤波、参考文献[4]提出的方法、改进非局部均值滤波法进行降噪处理,降噪结果如图4所示。

图4 Lena图像降噪结果对比
由图4可知,改进非局部均值滤波对图像的降噪效果更为理想。为了从客观上对比非局部均值滤波改进前后以及参考文献[4]对图像降噪的性能,对峰值信噪比、等效视数、边缘保持指数、运行时间进行对比,结果如表1所示。

表1 不同算法性能对比(Lena图像)
由表1可知,改进非局部均值滤波相对于非局部均值滤波、参考文献[4]提出的方法,其图像降噪性能有了很大的改进,通过积分图像的改进大大提升了算法的运行效率,同时相似权重系数融合了像素点欧式距离得到的相似权重系数和相似框架最大特征高斯加权系数,这使得降噪图像的峰值信噪比、等效视数、边缘保持指数均增加。
2.2.2合成孔径雷达图像
合成孔径雷达具有全时段、全气候条件下对地球表面成像观察的能力,但是受到多种因素的影响,合成孔径雷达图像经常会斑点状的噪声污染,这使得图像的分割、识别难度比较大[11]。采用改进前后的非局部均值滤波法、参考文献[4]提出的方法对合成孔径雷达图像进行降噪处理,降噪结果如图5所示。
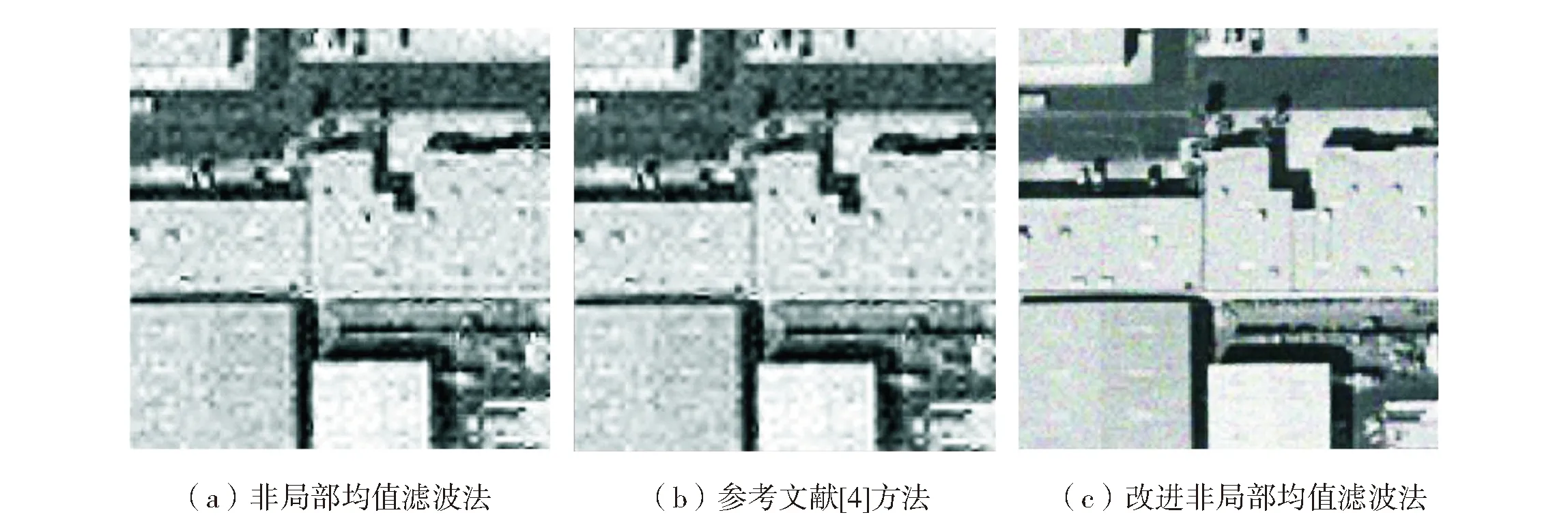
图5 合成孔径雷达图像降噪结果对比
由图5可知,改进非局部均值滤波对合成孔径雷达图像的降噪效果明显优于非局部均值滤波和参考文献[4]提出的方法。为了从客观上对比非局部均值滤波改进前后以及参考文献[4]对合成孔径雷达图像降噪的性能,对峰值信噪比、等效视数、边缘保持指数、运行时间进行对比,结果如表2所示。

表2 不同算法性能对比(合成孔径雷达图像)
由表2可知,改进后的非局部均值滤波对图像降噪的性能得到了很大提升,明显优于参考文献[4]提出的算法和改进前的非局部均值滤波算法。从整体上来讲,图像的降噪效果也更为理想,噪声平滑相对也比较彻底,能够更好地恢复图像的边缘。
3 结论
针对传统非局部均值滤波存在的算法效率低、降噪效果不理想的问题,采用积分图像避免了大量的重复性计算,提升了算法的效率。在此基础上,相似权重系数融合了像素点欧式距离得到的相似权重系数和相似框架最大特征高斯加权系数。将改进前后的非局部均值滤波和参考文献[4]方法分别应用于加入标准差为10噪声的Lena图像和合成孔径雷达图像,结果表明,改进非局部均值滤波对图像降噪的效果更佳,噪声平滑比较彻底,能够有效恢复图像边缘,这对提升图像降噪质量具有一定的参考价值。
猜你喜欢
国际比较文学(中英文)(2019年1期)2019-11-12
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年11期)2017-04-04
东方教育(2016年4期)2016-12-14
高中生学习·高三版(2016年1期)2016-05-30
中学生数理化(高中版.高二数学)(2016年4期)2016-03-01
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
中国校外教育(下旬)(2014年10期)2014-11-20
数学年刊A辑(中文版)(2014年4期)2014-10-30
