
轻小型全铝高分相机
2023-12-01 05:50:08孙景旭谢虹波李淑贤谢新旺
中国光学 2023年6期
孙景旭 ,谢虹波,李淑贤,谢新旺,王 硕,周 峰
(1.季华实验室 光电科学与技术研究部,广东 佛山 528200;2.中国人民解放军96035 部队,吉林 吉林,132101)
1 引言
对于日益精细化的行业应用,精准高效且快速的航天探测能力显得愈发重要。大口径长焦距空间光学遥感器[1]具有高分辨率与大视场成像能力。然而,因为其体积重量大,加工制造难度高,开发周期长且成本高,无法短期发射部署形成覆盖全球的图像信息天网。近几年出现的小型空间光学成像系统则体积小、重量轻,制造简单,研制周期与成本成几倍量级下降。虽然其分辨率偏低,但也可以满足详查的需求。机动灵活的快速组网可提供快速高效的遥感数据产品,与大口径长焦距大体量空间光学遥感器进行有机组合可以取长补短,形成我国完善的航天图像信息网[2]。
轻小型空间光学相机[3]为实现体积和重量的轻量化,光学系统选型及光机结构的优化设计是关键。反射镜超轻量化需综合考虑反射镜材料、轻量化形式以及支撑结构,此外,还需考虑镜面面形精度和外部载荷及环境因素的综合影响[4]。主支撑结构需要保证主次镜间的位置精度,确保环试后依然具有良好的成像质量。
孔德成设计的轻小型离轴三反空间相机,采用离轴三反光学结构和5.5 μm 像元探测器,相机口径为120 mm,焦距为600 mm,在528 km 轨道高度上实现了4.84 m 的地面像元分辨率,幅宽为58 km,相机重量为24.8 kg。该相机主三反射镜材料选用微晶玻璃,次镜材料选用熔石英玻璃,主三镜支撑和主支撑框架材料选用高体份铝基SiC/Al[5]。谢永军、毛祥龙介绍了一种全铝光机自由曲面成像望远镜,F#3.7,传感器像元尺寸为6.4 μm×6.4 μm,其采用空间验证的Al6061 T651表面镀磷化镍层(NiP)[6]。王上介绍了一种空间相机全铝合金光机结构,主反射镜有效口径为118 mm,F#6.5,焦距为770 mm,传感器像元尺寸为7 μm,光机结构整体质量为1.52 kg,包络尺寸在250 mm×170 mm×170 mm 以内[7]。
Risse S 介绍了JSS-56 有效载荷,采用6061铝合金表面镀磷化镍层(NiP)。主镜尺寸为210 mm×190 mm,F#4.3,焦距为633 mm,包络尺寸为 641 mm×385 mm×865 mm[8]。美国行星实验室发射升空的鸽子卫星(DOVE),根据官方网站资料显示,目前有200 多颗卫星在轨,分布在国际空间站轨道(ISS)和太阳同步轨道(SSO)上。鸽子卫星光学载荷采用马克苏托夫-卡塞格林式光学系统,1 100 万像素CCD 可实现3~5 m 地面分辨率,幅宽为24.6 km×16.4 km,卫星平台重量仅为5 kg,体积为100 mm×100 mm×300 mm[9-11]。
随着空间光学遥感成像技术的蓬勃发展,对快速响应及大量部署的应用需求越发紧迫,因此,研究轻小型高分辨率创新型相机具有重要的应用价值和工程挑战。
2 相机成像技术体制
2.1 光学系统形式选择
设计轻小型高分相机,在500 km 轨道上实现3.48 m 分辨率高性能成像(幅宽为15 km×15 km),即要以1.43"的像元角分辨率实现Φ2.5°的视场。可以实现此指标的光学系统型式有同轴与离轴两大类,每一类都有二反、三反甚至四反多种型式[12]。其中,实现轻小结构的有RC+补偿组、同轴三反与离轴Rug-TMA 系统,各自的结构特点对比见表1。

表1 典型轻小结构光学系统型式特点对比Tab.1 Comparison of types and characteristics for common optical systems
从表1 定性分析比较可以看出,在3 种可选光学系统型式中,离轴三反Rug-TMA 系统结构较大,RC+补偿组与同轴三反TMC 可实现Φ2.5°左右的视场,且光学长度较短,约为焦距的1/5~2/5。对于同轴三反TMC 与同轴RC+补偿组两种光学系统,同轴三反TMC 在主镜后有偏置的三镜及很长的后光路需要折叠,可通过采用多次光路转折来减小后光路尺寸,但需要高次非球面组合实现。虽然其结构尺寸小,但给光学加工和光学装调引入较多工艺和工程复杂难度。同轴RC+补偿组不需更多折叠,且为局部突起,而且补偿组中非球面数量少,系统具有中间像面,加工制作和光学装调工艺成熟,工程实现性好。
轻小型高分相机要尽可能地减小结构体积,故选择同轴RC+补偿组的光学系统。其在保持优良成像能力的前提下,相机结构简单、紧凑、畸变小、装调工艺性和环境适用性最好。同时RC 光学系统通过配合补偿组可以很好地校正光学畸变,在轨对地物目标成像时能够高精度确定其成像位置,有利于实现较高的定位精度要求。
2.2 成像体制确定
目前主流航天光学遥感器主要采用大F数+大像元的技术体制,大F 数势必带来长焦距,相机体积和重量无法优化至轻小型量级[13]。
小F 数+小像元成像优势明显。道理很简单,小像元必有短焦距、短筒长的技术体制。其没有得到主流应用主要是因为有阻碍其应用的技术瓶颈。比如应用小像元成像,感光面减小可能会带来传递函数和信噪比同时下降或一方面下降,这对光电成像的空间相机而言是难以接受的。再比如采用小F 数RC 系统,加上进一步要求光学长度尽可能缩短,则尺寸最大的主镜F 数也相应减小,也就意味着在同样光学口径下,主镜半径减小,主镜的高次非球面更加内凹,其结果是高次非球面的陡度增加很多,即使用最好的加工手段也不容易达到要求的面形精度,或不能收敛。再加上超轻量化设计的超薄镜壁主镜会引发粗加工易破裂且易变形的风险,导致超薄超陡高次非球面镜加工制作的工艺难度大。
采用小F 数+小像元技术体制,虽然承受巨大风险压力,但若能及时突破多个关键技术瓶颈,也非常有应用前景。此技术体制应用主要优点是:
(1)采用小F 数,可在高奈频条件下获取不低于大F 数低奈频的光学传递函数,具有良好的成像质量,可确保高分辨成像的传递函数要求,同时能够保障信噪比;
(2)具有更轻小的体积与重量,相机体积可减小3~5 倍,相机重量降低5~8 倍;
(3)更轻小的空间相机可更好地适配不同构型的卫星平台,满足不同构型卫星平台上大量布置的需要。
3 轻小型空间相机设计
3.1 总体设计
轻小型空间相机采用F5.6 的RC+补偿组的光学结构,选用3.2 μm 像元面阵CMOS,像元规模为9 344 pixel×7 000 pixel。500 km 轨道高度上可实现3.48 m 地面像元分辨率,幅宽为 15 km×15 km 的成像需求。光学系统和光机结构采用全铝材料一体化设计,可提高相机热稳定性,减小热控压力。其中,光学反射镜材料采用荷兰RSA-6061 微晶铝合金,光机结构材料采用硬铝合金。这样可以在保证光学结构刚度的前提下实现超轻量化设计。相机主要包括主、次反射镜组件、补偿组件、成像电子学及外罩组件。优化设计后相机整机重量为2 kg,体积为100 mm×110 mm×200 mm。相机结构如图1 所示。
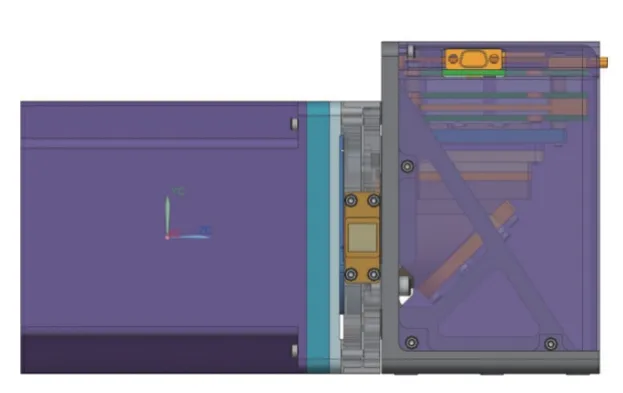
图1 相机整机结构Fig.1 Overall structure of the camera
3.2 光学设计
光学系统设计思想是在RC 系统基本对称的基础上,采用非球面复杂化的结构形式来提升成像质量,尽量控制畸变。考虑到成像质量和分辨率的要求,结合CMOS 感光面的尺寸,设计时要适当提高光学系统焦距,提高成像分辨率。
采用同轴RC+补偿组校正像差,配合3.2 μm小像元CMOS 得到全视场内的完善像。通过优化设计匹配后,光学系统设计结果如表2 和图2 所示,光学系统稳定性公差如表3 所示。从设计结果可以看出,奈奎斯特频率处的平均光学传递函数为0.32@156 lp/mm 图形,平均点列直径为1.4 μm,80%能量集中在直径为2.1 μm 区域,全视场最大畸变优于1%。设计焦距为460 mm,视场角为Φ2.5°。
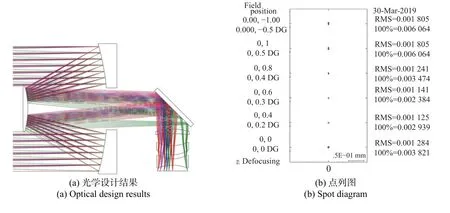
图2 相机光学设计结果Fig.2 Optical design results of the camera

表2 轻小型全铝高分相机光学设计结果Tab.2 Optical design results of all-aluminum high resolution camera with lightweight and compact size
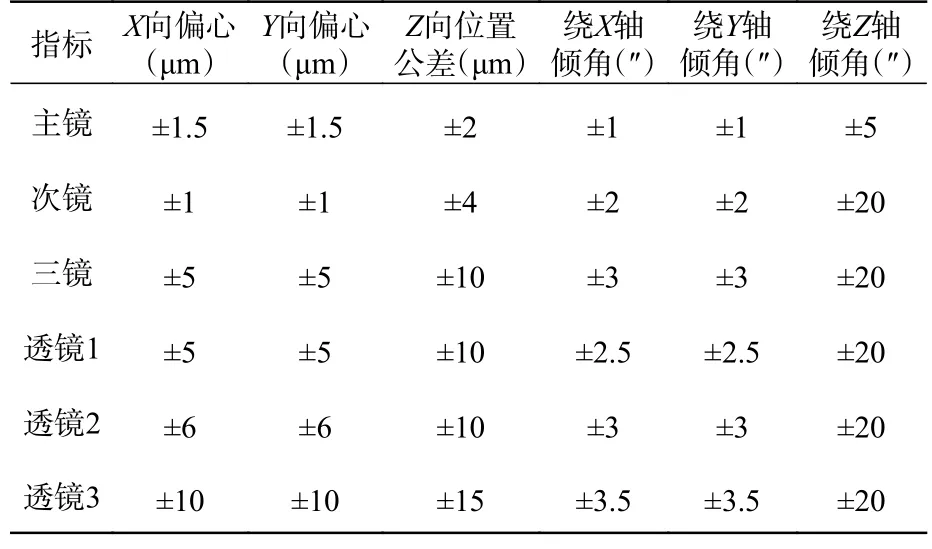
表3 光学系统稳定性公差Tab.3 Stability tolerances of the optical system
3.3 光机结构
相机采用RC+补偿组的结构形式,其主要由主镜、次镜、三镜和补偿组组成。设计高刚度及稳定性的光机结构,以保证各反射镜及补偿组的光学稳定性满足光学公差要求,实现近衍射极限高质量光学成像要求。相机主次镜的有效通光口径均较小。使用硬铝合金以保证本体结构刚度和热稳定性能。主、次反射镜均采用高稳定性微晶铝合金,轻量化率可达到85%。
主镜和次镜均为圆形反射镜,采用背部三点柔性支撑方式、采用外廓轻量化的结构形式及高等刚度结构设计优化铝镜背面外廓形状,以提高其力学性能,使其满足近衍射成像的面形精度。主镜口径为Φ90 mm,其与柔性为一体结构,可减小镜体加工轻量化残余应力对面形精度的影响。主镜背板为主支撑结构,高刚度超轻量化设计使其具有较高的动态刚度,避免或减小自激振动和强迫振动。主镜采用三点与背板固联,主镜和背板分别如图3(a)和3(b)所示。次镜口径为Φ32.5 mm,同样为柔性一体结构,如图3(c)所示。三镜尺寸较小,采用周圈支撑方式。补偿组主要包括3 个透镜,口径均为22 mm。折射元件采用石英材料。每个透镜压圈与内壁套筒均设计有柔性结构,硬铝合金采用柔性支撑,以补偿温度变化带来的影响[14]。采用定心设计与定心装配,将同轴装配精度控制在15 μm 以内,偏心精度小于10″,如图3(d)所示。
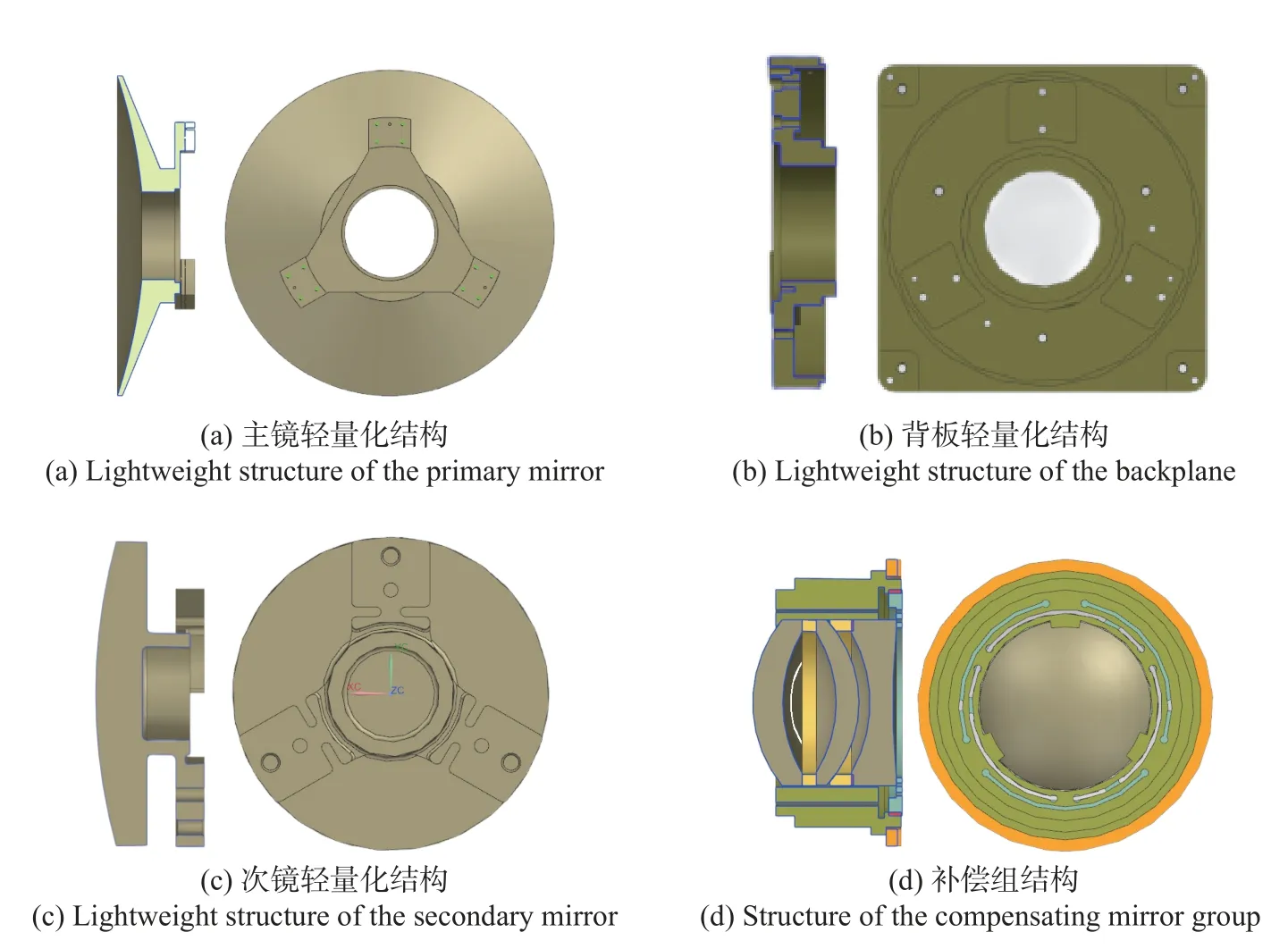
图3 各光学组件结构Fig.3 Structure of each optical component
仅采用经验设计难以保证相机在空间环境下正常工作,且要确保在运载发射过程中不被破坏、不产生残余变形,必须先对相机进行整机工程分析,通过分析相机可能经受的力学环境以及载荷,全面分析相机的静态刚度、动态刚度、结构强度和热弹性。其中,静态刚度主要分析各反射镜组件级、整机重力及±4 °C 温度漂移的面形是否满足表3 中的光学公差要求。动态刚度和结构强度分析主要用于保证整机基频高于100 Hz,避免发射过程中与卫星平台发生共振,导致相机结构发生破坏或引起颤动,进而影响成像质量。热弹性分析主要分析在20 °C±4 °C 的均匀温升下,相机反射镜精度是否仍满足表3 中的光学公差要求。在设计时,主要从以下几个方面来考虑:(1)等刚度轮廓超轻量化设计;(2)反射镜镜体局部适量采用柔性结构,组件保持高比刚度和高比强度;(3)反射镜及光机结构材料一体,线膨胀系数相匹配,确保热稳定性;(4)足够的动静态刚度。
考虑到相机的工作模式与工作环境,静力学和动力学分析结果如图4~图5(彩图见期刊电子版)所示。从表4 分析结果可得出:相机重力和温升对成像质量的影响满足光学设计公差要求。一阶模态为302.92 Hz,动态刚度也足够,满足运载发射的力学环境。
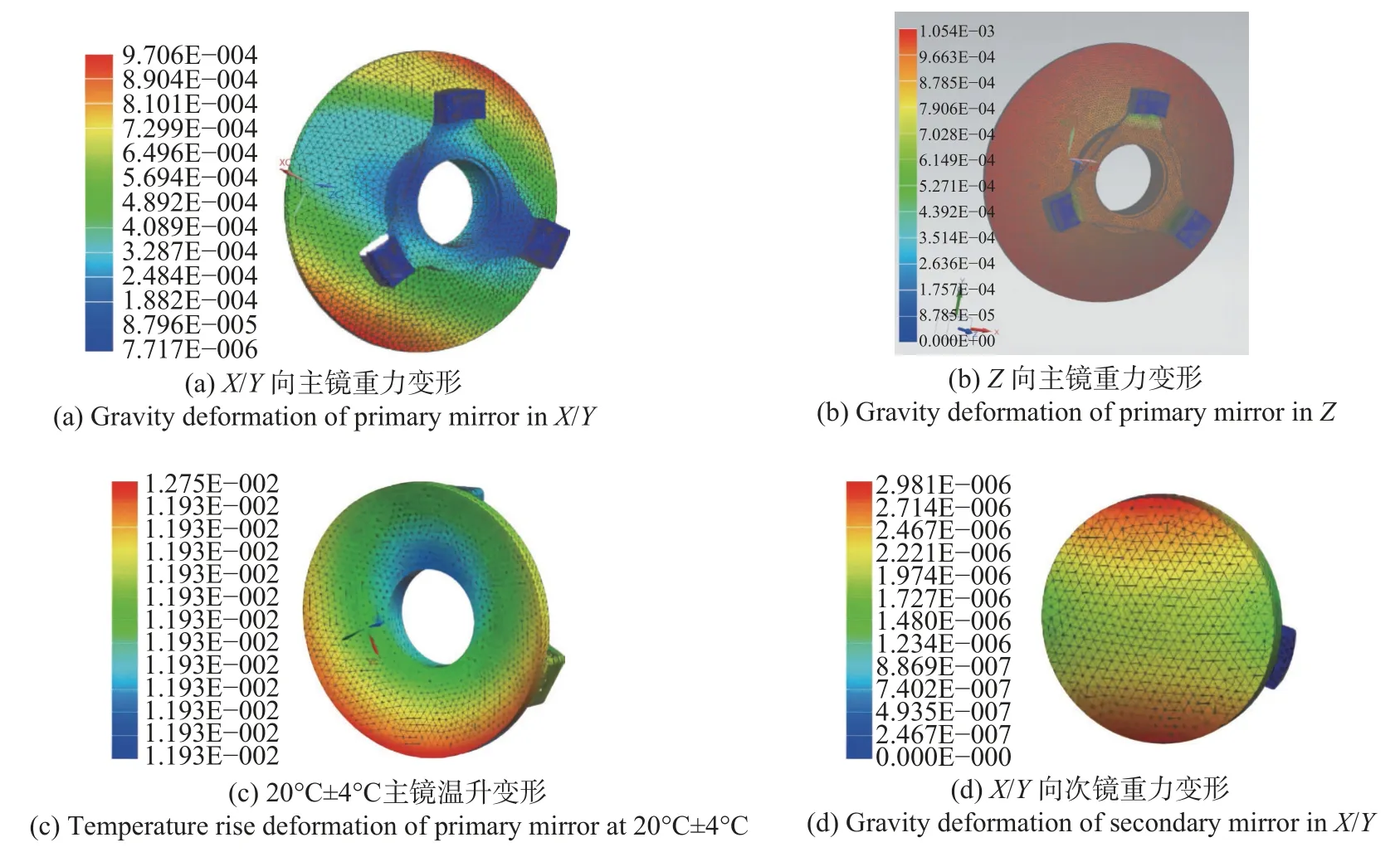
图4 相机静力学分析结果Fig.4 Static analysis results of the camera
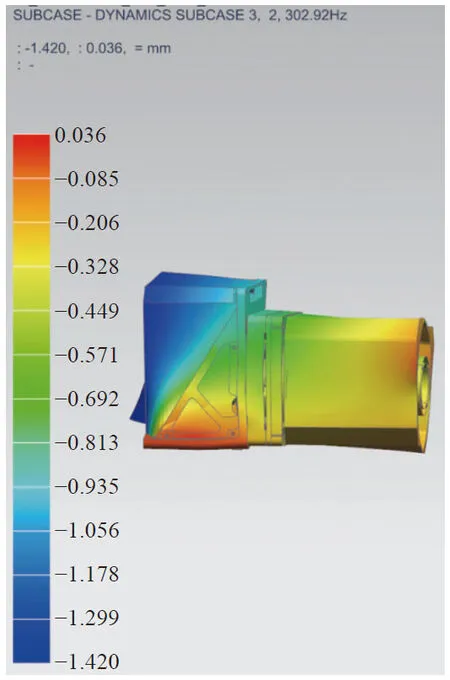
图5 相机一阶振型Fig.5 First-order vibration mode of the camera
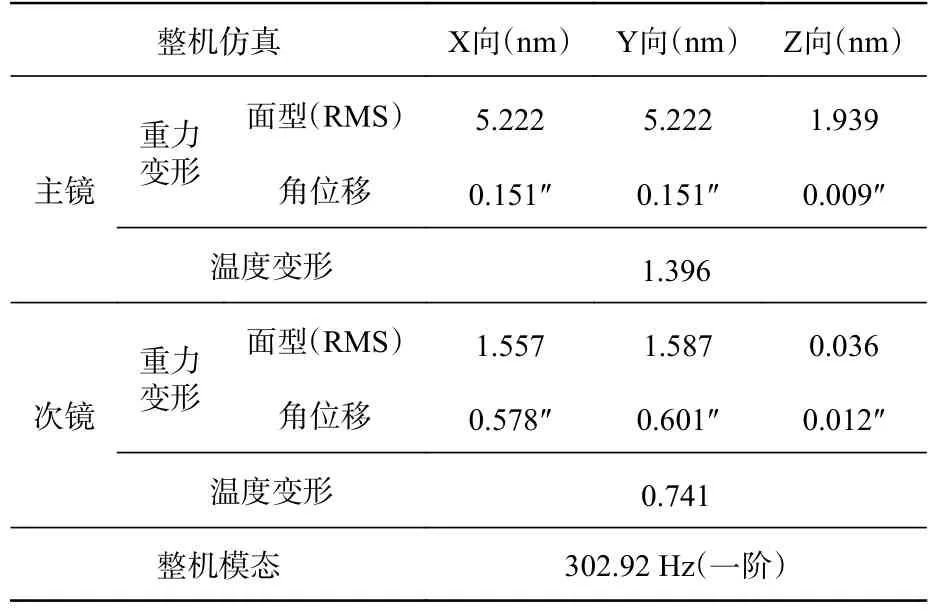
表4 相机静力学和动力学分析结果Tab.4 Static and dynamic analysis results of the camera
通过有限元仿真分析软件详细分析得知星载联接面处在力学输入10 g 正弦载荷时,相机最大应力及最小安装系数的部位出现在主镜背板与后框架的连接面。在100 Hz 下这个单元的应力响应值是24.53 MPa,如图6 所示,而后框架材料铝合金的屈服强度为400 MPa,由此可知其具有足够的安全系数。
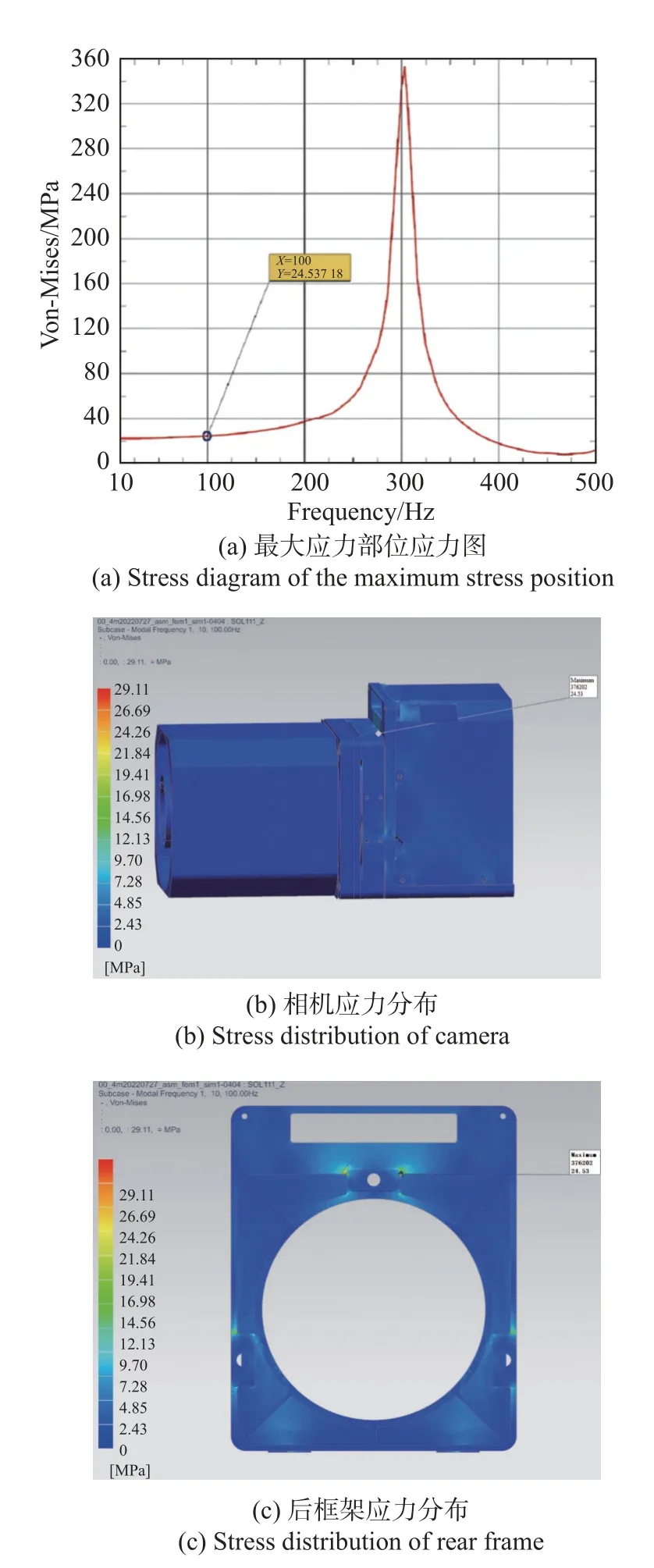
图6 正弦载荷10 g 输入时的相机应力及分布图Fig.6 Stress and its distribution of the camera under 10 g sinusoidal input
3.4 调焦机构
空间相机处于复杂的太空环境时,会产生离焦现象,从而使成像质量变差。针对上述问题,需要利用调焦机构补偿实现离焦量的校正,以获取最佳的成像位置。光学成像系统具有一定的允许离焦量。如果焦平面的偏移量在这个范围内则成像质量不会下降。其允许的最大离焦量即为光学系统的半倍焦深,
式中:Δ 为半倍焦深,F 数为5.6,λ为光学系统的工作波长,取值632.8 nm。计算得出最大允许的离焦量为39.7 μm。综合考虑相机复杂工作环境和各种误差因素,调焦机构的定位精度要小于±10 μm,调焦分辨率为1 μm,调焦量为±0.5 mm。
采用轻小型高精度凸轮调焦机构,采用步进电机驱动齿轮凸轮组件旋转,凸轮驱动焦面组件沿轴向导向组件往复运动。
3.5 成像电子学
相机结构尺寸很小,相机电子学可与卫星采用一体化设计。在平台上对相机实施控制,相机自身仅有成像电子学系统。为了降低成像电路的噪声,选用3.2 μm 大面阵(9 k×7 k)CMOS 探测器实现片上模数转换及放大功能,对外交互采用数字量输出。在电路设计方面,关键模拟电源采用低噪声线性稳压器,可提供优质的供电电源[15]。探测器驱动采用FPGA 作为主控芯片,可实现对探测器电源管理、工作参数配置、数据稳定采集、辐射校正及预处理等。整个机芯三层板可压缩整体尺寸,实现高度集成小型化。整体尺寸为65 mm×79 mm×25 mm,如图7 所示。

图7 相机成像电子学系统实物图Fig.7 Physical photograph of camera imaging electronics system
3.6 热控设计
相机采用全铝材料一体化设计,反射镜和光机结构材料均使用铝合金,补偿镜采用硬铝合金的柔性补偿结构安装固定,确保光学镜片和光机结构温度水平为20 °C±4 °C,相机电子学工作温度控制在0 °C~40 °C 范围内。
相机热控由卫星平台保证,不需要单独对主次镜组件和补偿镜组件做热控处理,主被动热控措施在放置相机的平台舱内实施。相机放置于筒式结构平台舱内,筒式结构外表面放置加热片,相机上设置温度传感器,加热片加热筒结构,加热后的筒式结构用于相机热控,保证相机处于20 °C±4 °C 的稳定环境中。通过热真空试验验证相机成像效果。
对于500 km 太阳同步轨道,轨道倾角为97.4°,降交点地方时为10:30 am。相机与平台通过10 mm的聚酰亚胺垫进行隔热安装。相机放置于平台舱内通过筒式结构辐射传热。经分析知相机内部热源为成像电子学。考虑对日定向的低温工况,建立热仿真模型,并加载边界条件进行分析计算,利用斯特藩-玻尔兹曼定律计算入光口的散热量,采用PWM 60%的占空比进行精细热控控制。考虑到换热系数的影响,该工况下共需10 W 的加热功率,相机各组件温度如表5 所示。稳态分析的仿真结果如图8 所示。从表5 和图8 可以看出,相机各组件均满足20 °C±4 °C 的温度要求。
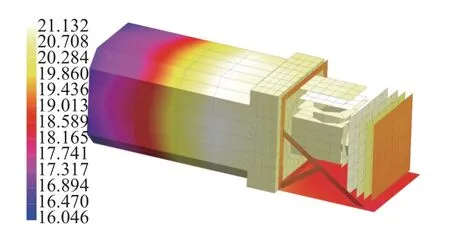
图8 对日定向低温工况稳态分析Fig.8 Steady-state analysis under low temperature on the behavior of sun-tracking
表5 对日定向低温工况各组件温度Tab.5 Each component's temperature under low temperature on the behavior of sun-tracking
4 集成测试
4.1 环境试验
为使相机经受发射过程中的力学环境,确保入轨后获得高质量图像,在发射前需对相机进行充分的环境试验验证,主要进行力学和热真空[16]两个试验,其余环境试验与整星一起进行。这样安排试验的好处在于简化试验过程但不省略关重试验,在确保相机关键性能的同时大大缩短相机研制周期。
力学性能测试主要是通过正弦和随机振动试验检验相机本体及成像电子学系统是否适应发射过程中的振动环境。根据实际运载及卫星平台联接方式,确定正弦和随机振动试验条件,如表6 所示。确认正弦振动加速度试验量级为1.05 g。通过输入单位载荷,获取加速度响应,相机安装在星箭分离面比较近的位置,相机与卫星平台采用筒式结构以提高卫星结构的系统刚度。卫星平台力学特性好,可确保星箭分离处的力学输入通过高刚度平台后在星载联接面处无明显放大。在振动试验前、后加入特征级检查试验,确认同一测点在前、后两次特征级试验中的频响一致,做为检验组件通过试验的标准之一。测点位置分别为主镜背板、外遮光罩末端和后遮光罩末端。图9 为振动试验现场照片。

图9 相机力学试验现场Fig.9 Mechanical test site of the camera
图10 和图11 分别为三方向正弦和随机振动的结果曲线。从试验结果可以看出,整机一阶模态为295 Hz,与仿真结果的偏差为2.61%。考虑到存在测量误差,可认为试验结果与仿真分析数据基本一致,三方向正弦振动最大处放大1.17倍,表明整机结构刚度足够大,相机具有非常好的力学稳定性。
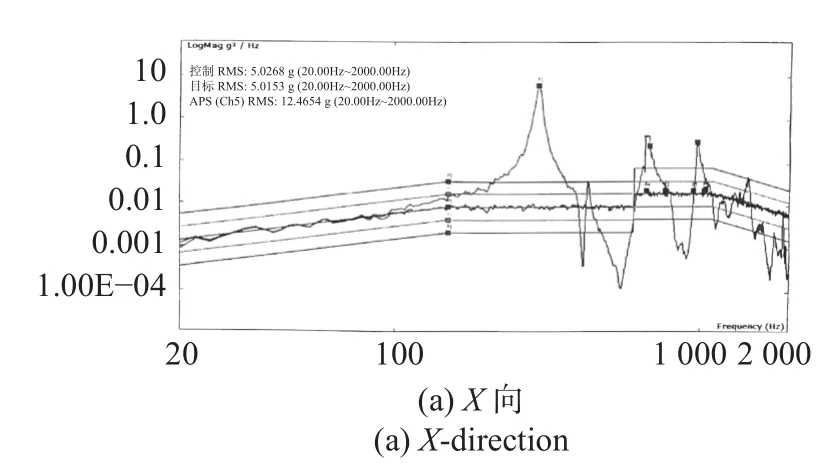

图11 三方向随机振动结果Fig.11 Random vibration results in three directions
热真空试验主要验证在真空和20 °C±4 °C温度环境下相机的成像保持性能,利用焦距为2 m 的平行光管通过真空罐光学窗口照明相机,采集真空舱内不同环境温度下的相机图像,通过图像分辨效果确认20 °C±4 °C 相机真空环境下的成像性能。图12(a)为热真空试验现场,1×10-4Pa 下测试了3 种温度下(16 °C、20 °C、24 °C)的相机成像效果,如图12(b)~12(d)所示。经计算成像光路奈奎斯特频率分辨率对应国标3 号分辨率板第19 组,均可清晰分辨。
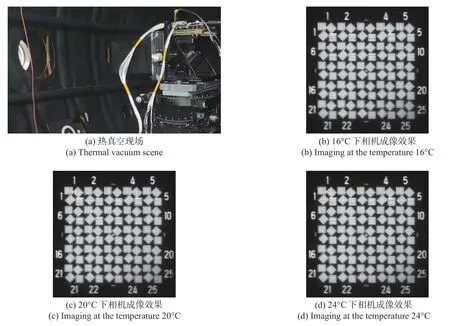
图12 热真空试验现场和成像效果Fig.12 Thermal vacuum test site and imaging effect
4.2 面形与传递函数测试
相机系统的面形质量和光学传递函数[17]直接决定了成像质量,使用ZYGO 干涉仪测试相机光学装调后中心视场和边缘视场的波像差,涵盖的光学元件包括主镜、次镜、三镜和补偿组。从测试结果可以看出,相机中心视场波像差RMS 为λ/15.6,5 个视场系统波像差均优于λ/12.3,可以确保相机近衍射极限高质量成像。5个视场的相机波像差(RMS)测试结果如表7 所示,干涉检测结果如图13(彩图见期刊电子版)所示。
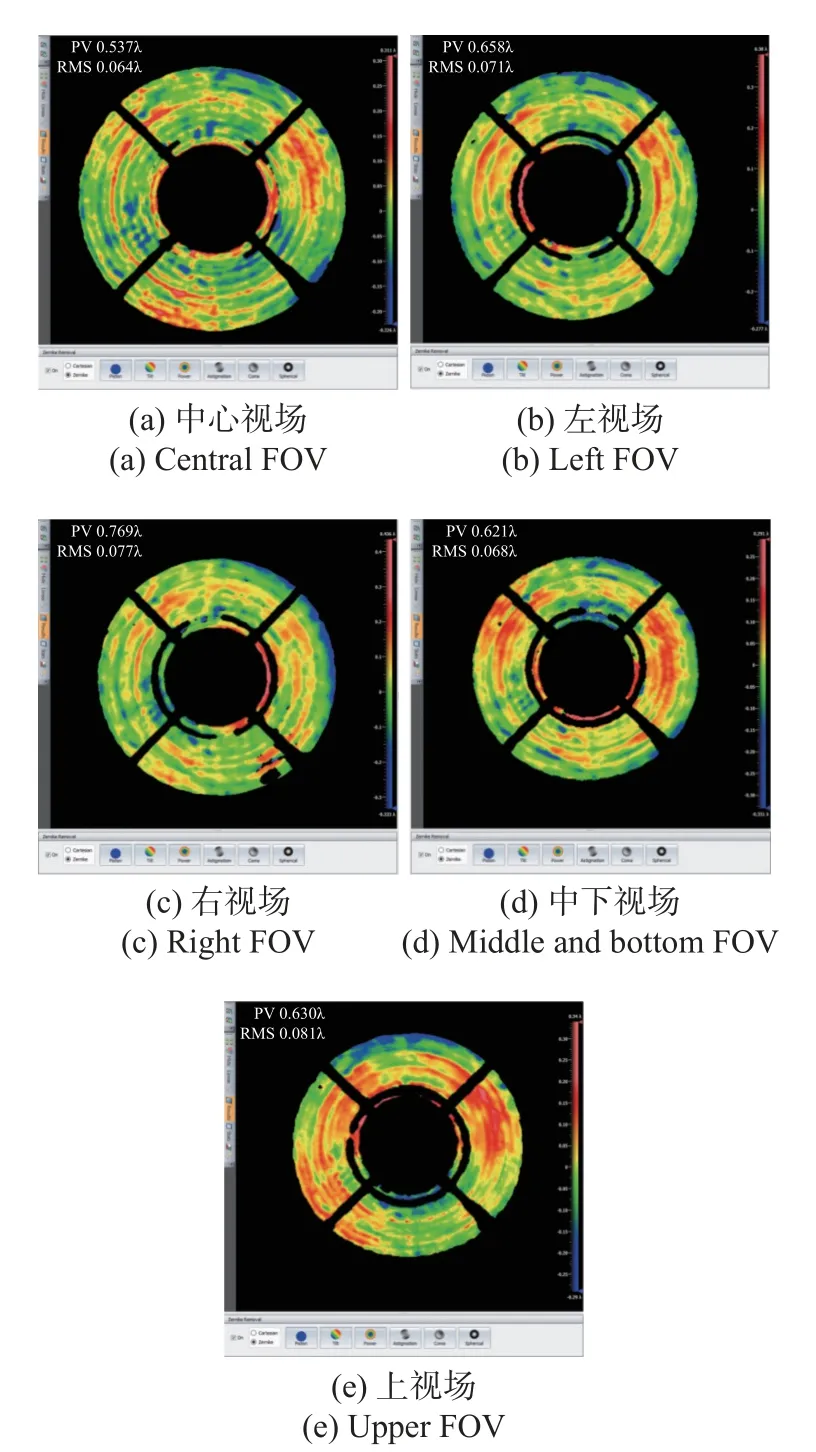
图13 相机5 个视场干涉检测结果Fig.13 Interference detection results of five FOVs
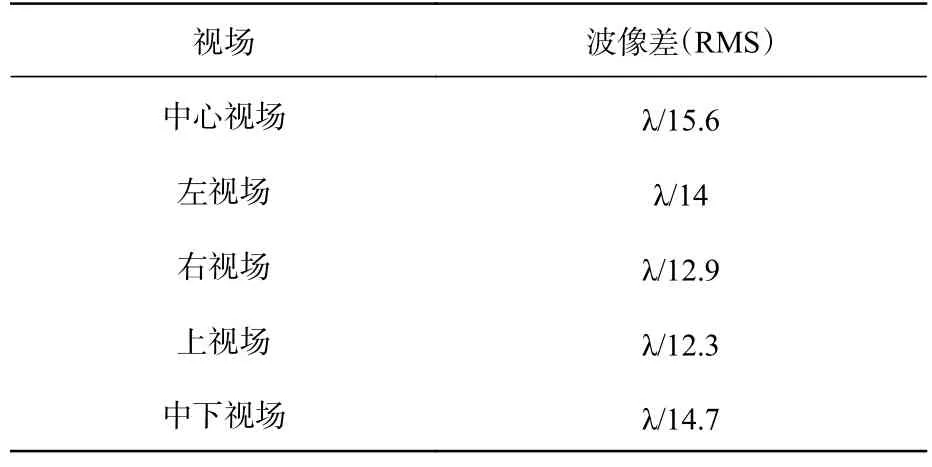
表7 相机波像差测试结果Tab.7 Wavefront aberration results of the camera
光学镜头与像面集成主要采用6 m 焦距平行光管将分辨率靶标成像到相机像面上,使用软件计算奈奎斯特频率处的分辨率靶标图像。通过精细调整光学镜头与成像电子学之间的位置,计算得到目标对比度最大处即为最佳焦面位置,将该位置通过修研垫片固化。
根据相机实测焦距和平行光管实测焦距,计算得该成像光路奈奎斯特频率对应国标4 号分辨率板第12 组,光学传递函数测试现场图如图14所示,相应的放大显示图像如图15 所示。根据光学传递函数计算公式可得光电系统的传递函数为0.217。
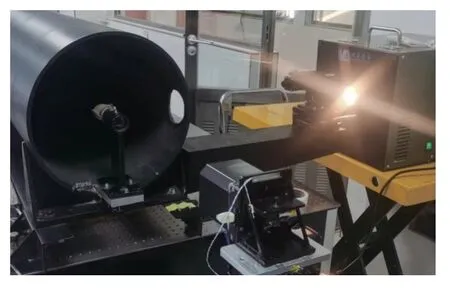
图14 光学传递函数测试现场Fig.14 Optical transfer function test site
4.3 外场成像
相机对2 km 处目标成像效果如图16 所示。从图16 可以看出,相机成像效果良好,图像清晰且灰度层次分明,阴影边界处锐利。
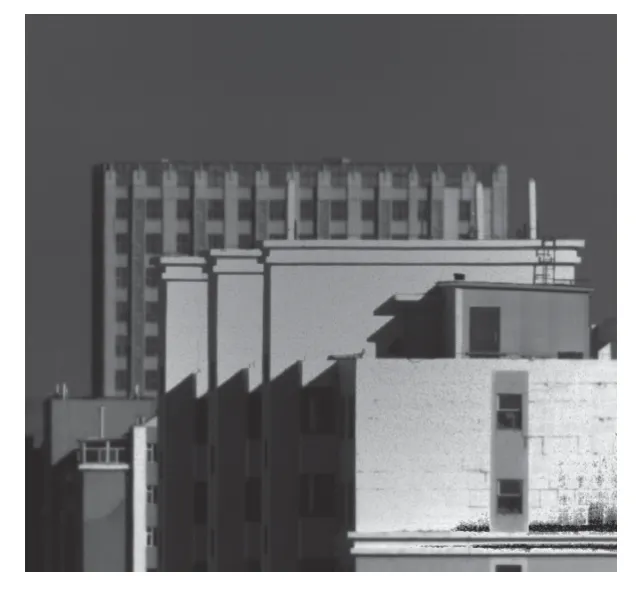
图16 2 km 目标外场成像图Fig.16 Imaging of 2 km target outfield
5 结论
针对未来航天图像信息网大量发射部署光学载荷的需求,提出了轻小型高分相机采用小F 数+微小像元的总体技术体制和RC+补偿组的光学系统形式。详细设计了全铝一体化结构的3.48 m 高分相机,并介绍了总体、光学、光机结构、成像电子学和热控的详细设计方案。最后,对轻小型全铝高分相机进行了详细的集成测试,主要包括环境试验、面形与传递函数测试和外场成像。试验和测试结果表明:整机重量为2 kg,一阶模态为295 Hz,整机结构刚度足够大,满足相机发射等场景需要;相机中心视场波像差RMS为λ/15.6,5 个视场波像差RMS 均优于λ/12.3,可 以确保近衍射极限高质量成像;相机实测光学传 递函数为0.217;对2 km 处目标成像效果良好,图 像清晰且灰度层次分明。可以为轻小型甚高分辨 率空间相机设计提供理论指导和工程借鉴。
猜你喜欢
应用光学(2023年3期)2023-06-05 09:21:56
新能源科技(2022年9期)2022-11-20 19:28:56
中国光学(2021年6期)2021-11-25 07:48:32
环境技术(2020年1期)2020-03-06 11:41:02
中国医疗设备(2019年1期)2019-01-15 12:10:54
光学精密工程(2016年11期)2016-12-19 02:30:19
光学精密工程(2016年6期)2016-11-07 09:07:15
光学精密工程(2016年1期)2016-11-07 09:01:50
激光与红外(2015年10期)2015-03-23 06:07:18
激光与红外(2014年8期)2014-03-20 08:50:22

- 中国光学的其它文章
- 惯性传感器地面弱力测量系统热设计
- InGaAs/AlGaAs quantum well intermixing induced by Si impurities under multi-variable conditions
- Orbital-angular-momentum spectra in coherent optical vortex beam arrays with hybrid states of polarization
- The influence of the number of coupling regions on the output of the ding-shaped microring resonator
- A sliding-mode control of a Dual-PMSMs synchronization driving method
- Polarization-multiplexing of a laser based on a bulk Yb:CALGO crystal