
新型漂浮式风力机Spar平台动态响应及系泊研究
2023-12-01 10:13于静梅刘耀鸿吴世朝戴文智杨新乐
振动与冲击 2023年22期
于静梅, 刘耀鸿, 吴世朝, 戴文智, 杨新乐
(辽宁工程技术大学 机械工程学院, 辽宁 阜新 123000)
近年来,海上风力发电技术发展迅速[1],逐渐向深海开发建设风电场。相比于固定式海上风力机,漂浮式风力机没有大型固定结构,适用于深海风力发电工程,但由于服役环境相对恶劣,漂浮式平台会受到更加复杂的环境载荷,其运动响应也表现出强烈的非线性特征,因此准确预测平台运动特性可大大提高漂浮式风力机运行方案的可行性。
现阶段,漂浮式平台可分为四大类,分别为可深吃水的单柱式平台(Spar)、抗倾覆能力强的驳船式平台(Barge)、有小水线面的半潜式平台(semi-submerisible)、以张力腱为主要回复力的张力腿式平台(tension leg platform,TLP)[2]。漂浮式平台主要由系泊系统及压载系统[3]提供的恢复力使其在海洋环境中保持稳定。其中,Spar平台具有重心低、水线面小以及适用水深范围广等优点,但该平台因波浪激励的作用,在垂荡方向产生大幅运动[4],并且由于垂荡运动与纵摇运动存在耦合效应使其在纵摇方向稳定性随之下降。此外,Spar平台主体为圆柱,漂浮在海流中会产生涡街,使平台受到涡激载荷,增大平台运动响应。因此,国内外学者针对提高Spar平台稳定性展开大量研究,研究表明在实际工程中采用螺旋侧板可以提高漂浮式平台稳定性[5]。叶舟等[6]通过对螺旋侧板的数值研究,发现附加螺旋侧板后能够产生较大的结构阻尼,有助于抑制平台的运动响应。周国龙等[7]对螺旋侧板的螺距进行研究,发现附加螺旋侧板后Spar平台力运动响应得到一定改善,但螺距对平台运动响应的影响不大。Korkischko等[8]探究不同几何参数螺旋侧板对涡激振动的影响,研究表明在稳定流环境中,附加螺旋侧板能够明显抑制涡激振动(vortex induced vibration,VIV)效果。张楠等[9]通过改变螺旋侧板截面形状发现三角形截面螺旋侧板对尾流影响较大,抑涡效果最佳。Aggarwal等[10]通过FAST软件计算漂浮式风力机所受风载荷后作为定常力导入AQWA中对Spar平台进行敏感性分析。
研究[11]表明,螺旋布置扰流片对于浮式立柱的涡激振动有一定的抑制作用,但目前大部分研究中通过改变平台结构抑制其涡激运动,却没考虑改变结构后对平台的运动学与动力学性能的影响。因此,根据传统海工平台研究经验,提出将螺旋布置的扰流片附加于Spar平台漂浮式风力机底部。相比于螺旋侧板,该结构在抑制涡激振动的同时,具有便于安装、维修等优点,有助于解决目前漂浮式风力机如何进行重大部件维修更换的潜在风险和难题。通过对附加螺旋扰流片的漂浮式风力机进行水动力分析,为漂浮式风力机的发展提供理论参考。
1 研究对象
本文研究对象为NREL 5 MW风力机[12],其参数如表1所示。风力机承载平台为OC3-Hywind Spar[13],其参数如表2所示。通过建模软件建立漂浮式风力机(原平台)模型,如图1所示。由于螺旋扰流片的结构对称性,使其作用条件不受海流方向影响,适用范围广泛。提出附加螺旋扰流片的新型Spar平台,即在Spar平台底部安装若干螺旋分布的矩形扰流片。

图1 Spar漂浮式风力机模型Fig.1 Spar platform floating wind turbine

表1 NREL 5 MW 风力机参数Tab.1 Parameters of NREL 5 MW wind turbine

表2 OC3-Hywind Spar平台参数Tab.2 Parameters of OC3-Hywind Spar platform
由于Spar平台附加螺旋扰流片相关研究较少,扰流片尺寸则参考海洋石油平台立柱设计,通常将扰流片高度设为0.1D(其中D为Spar平台外径)。本文主要研究螺旋扰流片对Spar平台漂浮式风力机动态响应的影响以及绕流片纵向螺旋布置高度(以下称布置高度)对平台动态响应的影响,其中,扰流片为纵向螺旋布置,起始于Spar平台底部,螺距为0.85D,平台底部首个扰流片与平台上部最后一个扰流片之间横向投影距离定义为布置高度。根据Bianchi等[14]的试验研究,本文将扰流片长、宽、高分别设为0.1D,0.02D,0.05D,并选取9.3D(平台一)、8.5D(平台二)、7.7D(平台三)、6.8D(平台四)四种布置高度等距布置200个扰流片作为本文的对比研究对象。图2为平台二的扰流片布置示意图。
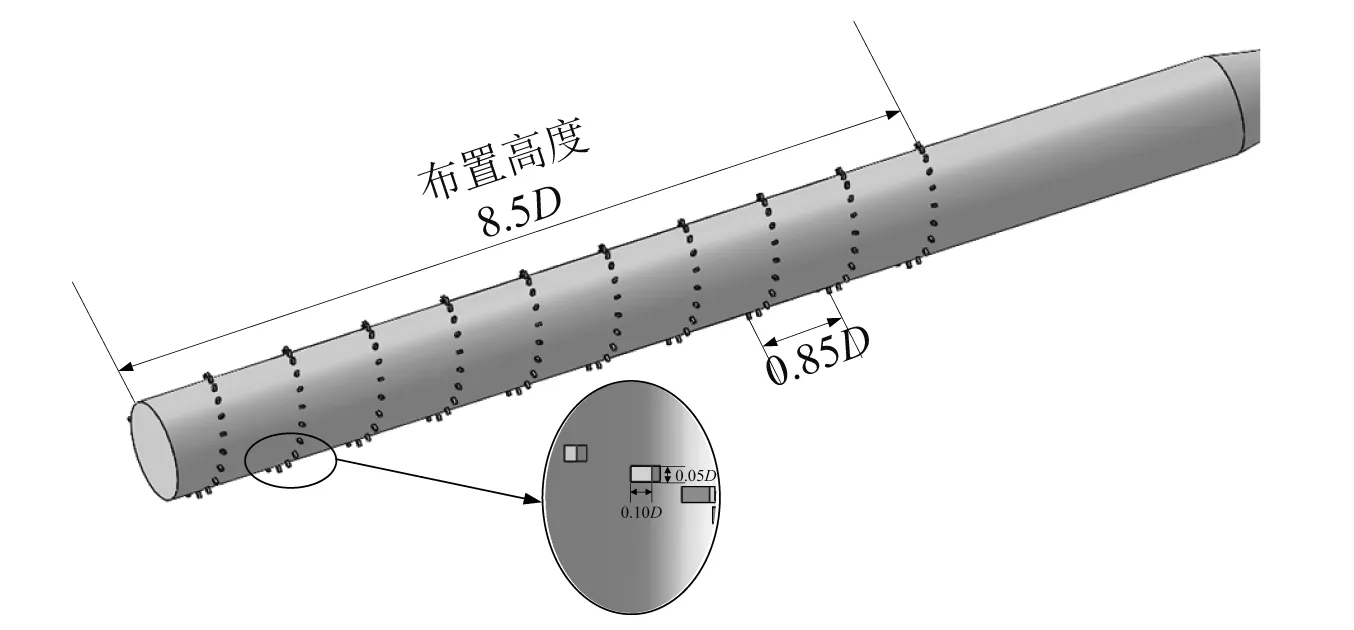
图2 扰流片布置示意图Fig.2 Schematic diagram of spoilers
2 研究方法
目前,基于WAMIT、Hydrostar及AQWA等海洋工程水动力软件的数值仿真广受国内外学者关注。较之于水池试验[15]方法,以上软件的数值仿真方法对水动力求解较为精确。此外,如HAWC2、FAST等专业的风力机仿真软件,虽然可以求解较准确的气动载荷,但对于漂浮式风力机而言,底部平台的运动将会诱发上部机舱及风轮的俯仰运动,从而使相对风速发生改变,如果忽略风波载荷的耦合问题,得出的计算结果是不准确的。因此,本文基于叶素动量理论并结合辐射绕射理论,通过动态链接库外接风载荷求解器FAST,将与AQWA计算时间步同频的风载荷考虑到耦合模型中,具体实现方式为先通过FAST计算塔基载荷,基于欧拉角的刚体运动变换通过动态链接库将塔基载荷作用于平台重心,在AQWA中计算平台的运动响应。此后,通过逆变换将平台运动响应传至FAST计算下一时间步的气动载荷后获得塔基载荷,如此反复实现对风波载荷的求解,研究风波载荷作用下Spar平台的动态响应。
2.1 风载荷
由于叶素动量理论的计算速度快、修正方法丰富,大量学者将其作为风力机气动载荷主要的计算方法。因此本文采用叶素动量理论对风力机气动载荷进行求解。
湍流风可表示为[16]
(1)
风轮所受推力
(2)
塔架所受推力为
(3)

2.2 波浪载荷
由于Spar平台尺寸较大,因此基于辐射/绕射理论求解波浪载荷,假设①海流为理想流体;②流域由海底表面、浮体湿表面和自由表面构成无限大空间。定义流场中速度势函数φ
(4)
(5)

(6)
(7)

(8)
式中:φincident为入射势;φdiffraction为绕射势;φradiation为辐射势;g为重力加速度;n为浮体表面法向量。
波浪激励载荷F
(9)
式中:ζa为入射波幅值;Bii为第i个模态下阻尼系数。
当前在社区糖尿病患者管理中,仍面临巨大的挑战,比如糖尿病患者多年来形成的就医习惯,基本药物制度药品目录限制,医保的差异化报销比例,分级诊疗政策的宣传,基层医疗机构服务能力,上转容易下转难等造成了糖尿病患者随意就诊、重复检查等问题,导致优质医疗资源的紧张和浪费。
2.3 平台运动自由度
浮体分别有关于x轴、y轴、z轴的平动和转动,称为浮体的6自由度运动,如图3所示。
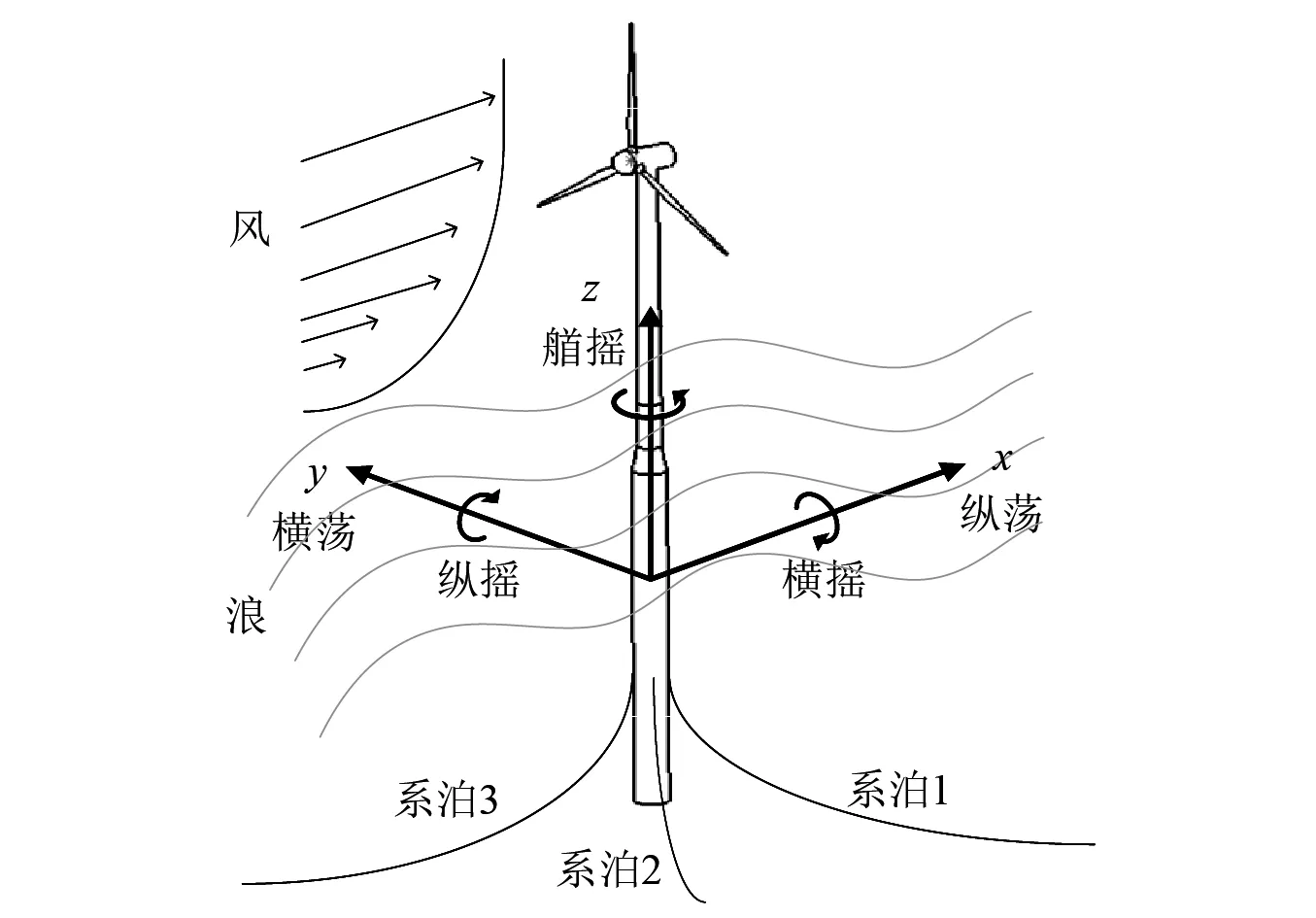
图3 平台6自由度运动Fig.3 Platform motions in six degrees of freedom
风波载荷作用下建立漂浮式风力机运动方程
(M+A)a(t)+Bv(t)+Kx(t)+

(10)
式中:M为平台质量;A为附加质量系数;a为t时刻平台加速度;B为阻尼系数;v为t时刻平台速度;K为静水恢复力;x为t时刻平台位移;Q为迟滞函数;FA为平台所受合力。
3 计算结果可靠性验证
为验证计算的准确性,首先验证网格划分能否达到计算精度的要求。在AQWA中进行网格划分时必须保证一个波浪周期中最多包含7个网格单元并且网格总数需少于40 000,网格尺寸越小,可计算波浪频率越大,在同时考虑计算精度以及计算耗时情况下设定最大网格为1.3 m[17],网格划分结果如图4所示。对比近场法与远场法模拟结果,在AQWA中为验证网格精度的主要方式,使用该方法对Spar平台纵荡二阶平均漂移力进行计算,由图5可知,两者趋势一致且吻合度极高,因此可知网格精度达到要求。

图4 网格划分Fig.4 Mesh distribution
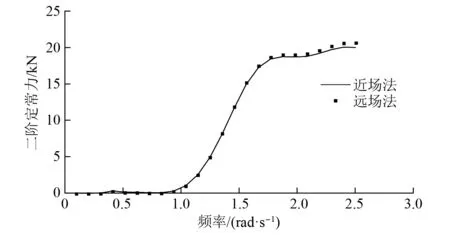
图5 纵荡二阶漂移力Fig.5 Surge second order drift force
将模拟结果与水池试验获得的试验值[18]进行对比。原始平台垂荡RAO(response amplitude operator)特性曲线与试验值的对比,如图6所示。由图6可知,模拟值与试验值差别不大,且均存在明显峰值,说明漂浮式平台在该频率附近运动响应较大,考虑到试验误差等因素,可认为模拟结果较为准确,并进一步证明本文网格划分的可靠性。

图6 原平台频域RAO与试验值对比Fig.6 Comparison of RAO in frequency domain
4 结果与分析
4.1 频域分析
本文考虑风波以-180°入射[19],由于纵摇与垂荡方向的运动存在耦合效应,因此主要分析纵荡、垂荡和纵摇方向的动态响应并对比研究螺旋扰流片布置高度对其的影响。辐射阻尼是影响Spar平台所受合力的重要因素,图7为Spar平台辐射阻尼特性曲线。由图7可知,附加扰流片后,均在不同程度上增加了平台辐射阻尼。改变扰流片布置高度后,对平台垂荡、纵摇方向辐射阻尼的影响较为明显,但对于平台纵荡辐射阻尼而言,布置高度对其影响较小。其中,当频率低频段时,不同扰流片平台与原平台之间纵荡、垂荡与纵摇辐射阻尼差别较小,均低于4%。当频率在0.4~1.0 rad/s,不同平台垂荡辐射阻尼变化较为明显,其中平台二辐射阻尼较原平台差别最大,平均提高约17.6%;平台二纵荡辐射阻尼较原平台提升最大,平均提升约9.2%;纵摇辐射阻尼在该频段变化较小,相比于原平台,提升率均低于5%。当波浪频率高于1.0 rad/s时,平台三纵荡辐射阻尼较大,相比原平台平均提升约5.2%;平台四垂荡方向辐射阻尼提升较大,平均提升约16.9%;平台二纵摇辐射阻尼相比于其他扰流片平台提升较为明显,相比原平台平均提升约7.1%。辐射阻尼发生变化的原因是:由于辐射阻尼主要来源于兴波,与频率关系较大。原平台本身主要为圆形剖面,如果力与力矩的矢量方向与主体轴重合,则会产生抵消效应,因此平台辐射阻尼较小。附加绕流片后,由于存在矩形剖面,抵消效应减弱增大阻尼。

图7 Spar平台辐射阻尼Fig.7 Radiation damping of platforms
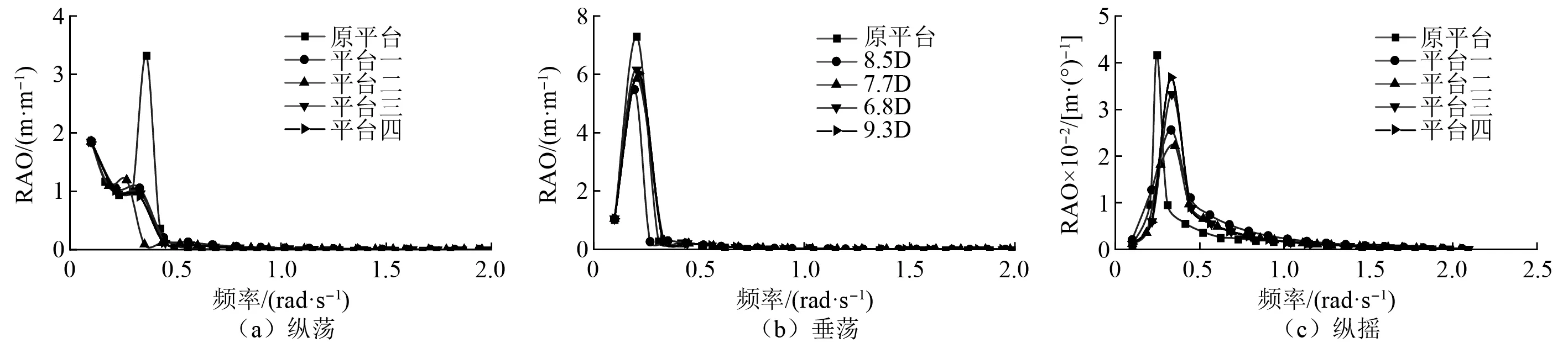
图8 Spar平台频域RAOFig.8 RAO in frequency domain
4.2 时域分析
本文风谱由Kaimal湍流模型生成,平均风速为11.4 m/s,波浪由P-M谱生成,有义波高为3.2 m,跨零周期为7 s。由于Spar平台附加扰流片后,平台二在以上四种平台中稳定性改善情况最佳,因此,主要对原平台与平台二进行时域对比分析。
由图9可知,平台二在纵荡、垂荡和纵摇方向位移相比于原平台均有所降低,其中纵荡响应幅值标准差约为原平台的40.1%。风载荷对浮式风力机纵荡响应影响较大,因此扰流片对于平台稳定的促进作用也越发明显。而在垂荡与纵摇方向,平台二的响应幅值标准差分别约是原平台的5.3%、0.5%,对平台运动响应有一定的抑制作用。

图9 平台时域运动响应Fig.9 Platform response in time domain
由图10可知,在额定工况下,平台二的转子推力相比于原平台更加稳定,响应方差约是原平台的79.7%,这将直接影响风力机的发电功率以及稳定性,降低叶片根部疲劳损伤风险,通过分析,平台二的发电功率较原平台提升约4.8%,说明在额定工况下,绕流片平台漂浮式风力机的性能比较优秀。
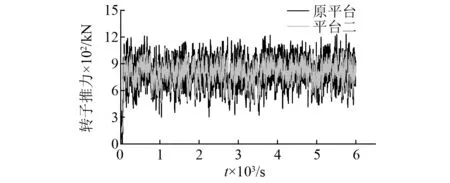
图10 转子推力Fig.10 Rotor thrust
相对于风波载荷作用方向,1号系泊缆处于松弛状态,2号、3号系泊缆由于对称布置,因此主要对3号系泊缆进行分析。图11为3号系泊张力时历曲线。由图10可知,在风波载荷作用下,由于平台运动响应降低导致3号系泊卧地锚链部分有所减少,较之于风波载荷下原平台系泊张力响应方差增加约2.6%。因此,扰流片平台展现出的较好的稳定性与系泊所提供恢复力有关,但这也增加了系泊系统的负荷,容易造成系泊疲劳损伤。

图11 系泊张力Fig.11 Cable force of the platform
4.3 系泊安装配重对漂浮式风力机的影响
由于扰流片平台系泊系统受力有所增加,在复杂的海洋环境下,为防止Spar平台浮式风力机系泊系统由于频繁张紧与松弛造成的疲劳损伤导致单根系泊失效进而引起系泊系统整体失效[20]的严重问题,本文提出将配重浮筒连接在系泊缆上,从而达到为系泊提供回复力,降低系泊疲劳张紧目的,浮筒安装方式如图12所示,浮筒[21]参数如表3所示。其中L为系泊长度,安装距离为浮筒距导缆孔的距离。
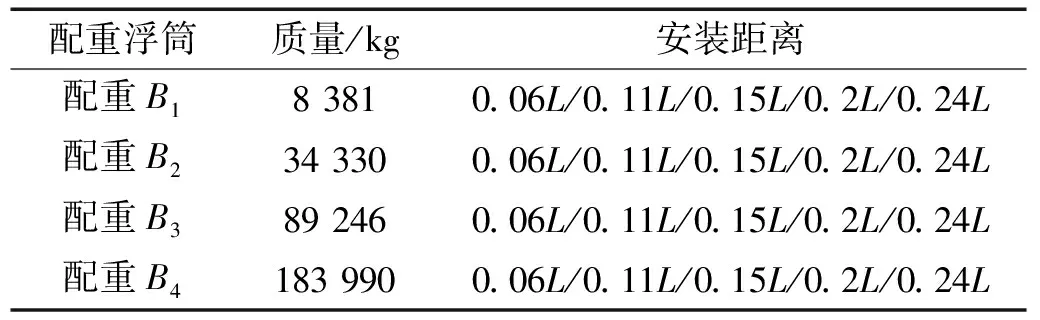
表3 配重浮筒参数Tab.3 Counterweight buoy parameters
图13为额定工况下平台二的不同系泊-配重结构的系泊张力统计图,其中P0代表无配重时系泊张力统计量。由图可知,系泊安装配重后系泊张力各项统计量均显著下降,说明配重对系泊系统提供的回复力有一定作用,其中配重4在位置五处系泊张力波动幅值标准差最小,较无配重情况下一号系泊响应降低约约47.4%。三号系泊降低约29.6%。
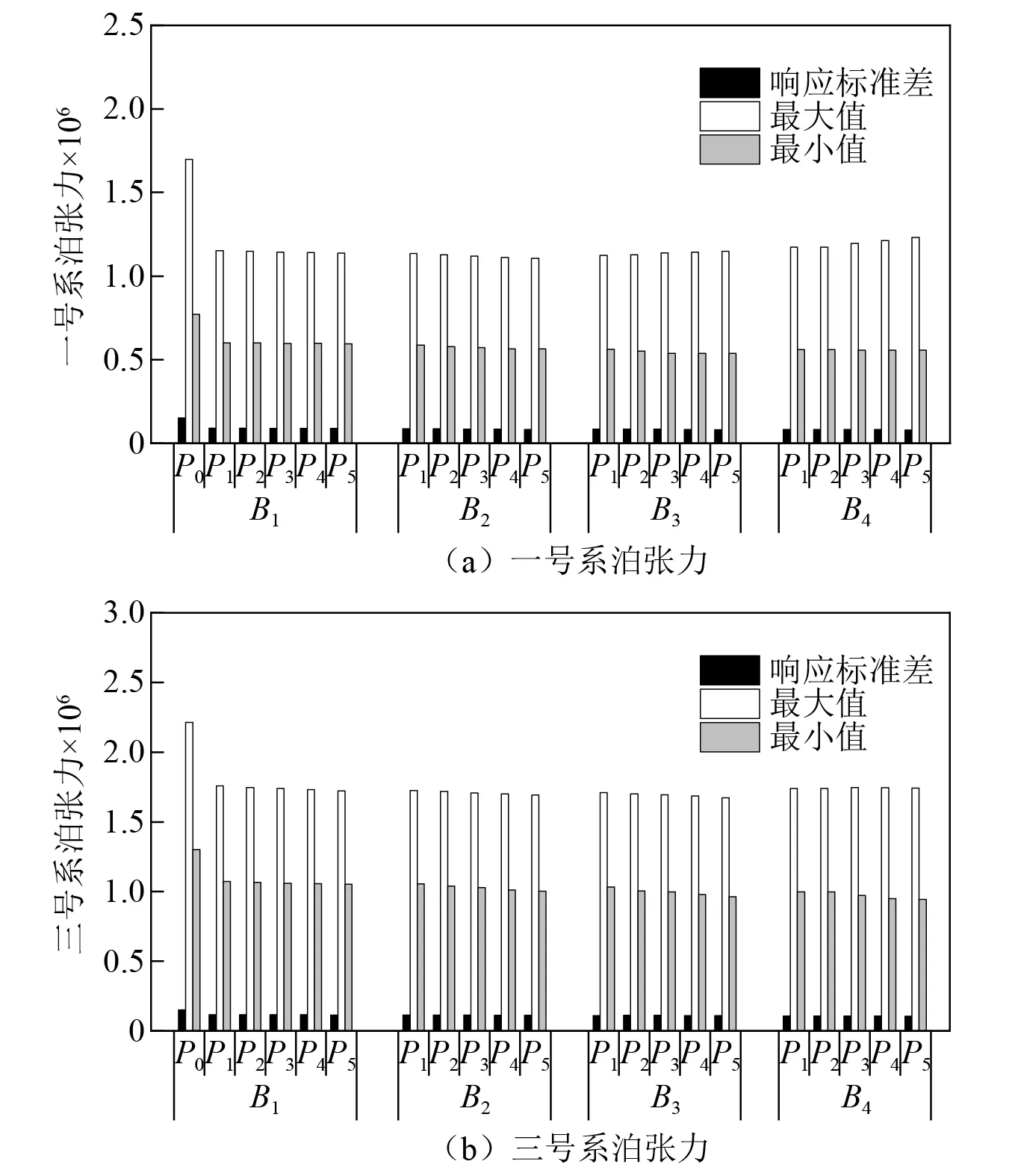
图13 系泊张力统计量Fig.13 Mooring tension statistics
图14为安装配重后平台二时域响应时历曲线。由图可知,安装系泊配重后平台纵荡、垂荡和纵摇三方向的动态响应均有所降低,其中垂荡运动抑制效果最为明显,相比于无系泊配重降低约57.1%;纵荡方向虽在运动初期响应幅值较大,但整体运动过程中波动较小,响应幅值标准差较无配重情况下降低约15.3%;而纵摇方向在系泊安装配重前后,平台响应变化较小,较无配重时约减小3.6%,说明系泊配重对提升平台纵摇方向稳定性的贡献较少。

图14 系泊配重后平台时域响应时历曲线Fig.14 Movements of Spar after Mooring counterweight in time domain
为深入探究安装系泊配重前后平台二的动态响应,对平台运动时域曲线进行快速傅里叶变换得到谱密度曲线,谱密度曲线不仅可以直观反映能量集中程度还能通过谱距得出平台运动的度量参数,如图15所示。由图15可知,纵荡方向以低频响应为主,系泊配重的扰流片平台纵荡谱密度曲线峰值降低约10.3%,且远离波浪谱峰周期,可避免共振发生;垂荡方向中,系泊安装配重后,频率0.2 rad/s附近的响应明显降低,而对垂荡方向的低频响应影响较小,此时平台垂荡响应以低频响应为主,谱峰显著降低的同时远离波浪频率,有效提高平台的垂荡响应;在系泊系统安装配重浮筒前后,纵摇响应谱密度曲线峰值变化较小,曲线特性也无明显差异,说明安装系泊配重对扰流片平台的纵摇响应不大。

图15 平台时域运动谱密度曲线Fig.15 Energy density of Spar platform response
图16为二号系泊断裂后平台二安装系泊配重浮筒的时历曲线。由图16可知,二号系泊失效后平台纵荡响应幅值在1 000 s附近有所增加,在3 000 s附近明显降低,整体响应幅值降低约9.7%;平台垂荡响应幅值在系泊失效时波动较小,平台垂荡运动趋于稳定后,响应幅值较无配重时也有所改善,说明系泊安装浮筒能够明显提升额定工况及事故工况时浮式风力机垂荡方向的稳定性,相比于无配重情况下,垂荡响应幅值标准差降低约29.2%;而二号系泊失效后,对纵摇运动的影响较小,安装浮筒前后纵摇响应幅值标准差变化约0.5%。因此,对系泊系统安装配重浮筒既能提高额定工况下浮式风力机纵荡、垂荡以及纵摇方向的稳定性,还能降低系泊缆因频繁张紧引发疲劳损伤的问题进而导致系泊系统失效的严重后果。此外,二号系泊失效后,安装配重浮筒的浮式风力机,在垂荡运动方面展现出更好的稳定性,在纵荡、纵摇方向的稳定性也有一定提升,可在事故工况发生时,有效提高浮式风力机安全运行的可靠性。

图16 系泊断裂后平台时域响应时历曲线Fig.16 Movements of Spar after mooring line cracks in time domain
5 结 论
本文提出一种新型扰流片结构漂浮式风力机Spar平台,通过对AQWA的二次开发,探究扰流片布置高度、系泊安装配重以及单根系泊失效情况时对漂浮式风力机Spar平台运动特性的影响,结论如下:
(1)频域分析中,附加绕流片能够一定程度上增加平台辐射阻尼与垂荡、纵摇方向的附加质量。随扰流片布置高度提升,辐射阻尼增加,附加质量变化较小。平台垂荡、纵摇幅值响应算子曲线峰值相比于原平台趋势大致相同,幅值均有所降低,其中平台二的曲线幅值最小。
(2)时域分析中,相比于原平台,平台二展现出更优秀的稳定性,其纵荡响应较原平台降低约40.1%,在垂荡和纵摇方向分别降低约5.3%,0.5%。
(3)在风波载荷作用下,平台二的转子推力相比于原平台波动更小,约是原平台的79.1%,这将降低叶根疲劳损伤风险、有助于提高风力机发电功率,研究表明,平台二风力机的发电功率较原平台提升约4.8%。
(4)由于绕流片平台的系泊张力较原平台上升2.6%,将配重浮筒安装在系泊系统中时,在降低系泊张力的同时有效抑制平台纵荡、垂荡、纵摇运动,较无配重时,分别降低约57.1%,15.3%,3.6%。
(5)当单根系泊失效后,安装系泊配重的扰流片平台垂荡响应明显下降约是无配重时的29.2%,纵荡响应降低约9.7%,对纵摇响应影响较小,有助于提高事故工况发生时浮式风力机安全运行的可靠性。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
中国海洋平台(2022年5期)2022-11-01
山东冶金(2022年2期)2022-08-08
房地产导刊(2022年4期)2022-04-19
数字海洋与水下攻防(2021年4期)2021-09-08
固体火箭技术(2021年3期)2021-07-15
船舶力学(2019年7期)2019-07-30
空气动力学学报(2019年2期)2019-05-08
中国航海(2018年1期)2018-05-07
世界海运(2017年10期)2017-10-19
