
水空两用推进器齿式超越离合器接合特性研究
2023-11-28 11:47:58徐龙胡志强杨翊王超
中国机械工程 2023年9期
徐龙 胡志强 杨翊 王超
摘要:从水空两用推进器对离合器的应用需求出发,设计了一种齿式超越离合器。通过仿真对离合器在不同结构参数下的接合特性进行优化分析,讨论了轮齿端面倒角和变位系数对接合过程、脱开速度和接触冲击力的影响规律。仿真结果表明,增大端面倒角度数和变位系数,可加快接合、脱开速度,减小接触冲击力;当倒角度数和变位系数分别为44°和0.84时,接合特性最优。继续增大倒角度数和变位系数,则接合、脱开速度变慢,接触冲击力变大。最后得到了接合特性指标最优的轮齿结构参数,并通过实验验证了仿真分析结果的正确性和有效性,仿真与实验的接合特性指标相对误差小于10%,证明了优化设计过程的有效性,设计结果满足推进器使用要求。
关键词:水空两用推进器;超越离合器;接合特性;接触冲击力
中图分类号:TH132.41
DOI:10.3969/j.issn.1004-132X.2023.09.014
Study on Engagement Characteristics of Gear Overrunning Clutch of Aquatic-aerial Amphibious Propellers
XU Long1,2,3 HU Zhiqiang2,3 YANG Yi2,3 WANG Chao2,3
Abstract: Based on the application requirements of aquatic-aerial amphibious propellers for the clutch, a gear overrunning clutch was designed. The engagement characteristics of clutch under different structure parameters were optimized for analysis through simulation. The effects of end face chamfer and displacement coefficient of gear tooth on engagement processes, disengagement speed and contact impact force were discussed. The simulation results show that increase of the angle of end face chamfer and displacement coefficient may accelerate engagement and disengagement speed and reduce contact impact force. When the number of chamfers and the coefficient of displacement are as 44° and 0.84 respectively, the engagement characteristics are optimal. If they continue to increase, the engagement and disengagement speed becomes slower and the contact impact force becomes larger. Finally, the gear tooth structure parameters with the optimal engagement characteristic index are obtained, and the correctness and validity of the simulation analysis results were verified by experiments. And the relative errors of the engagement characteristic index of simulation and experiments are less than 10%. The effectiveness of the optimized design process is proven, and the design results meet the requirements for the use of the propellers.
Key words: aquatic-aerial amphibious propeller; overrunning clutch; engagement characteristics; contact impact force
0 引言
水空跨域海洋機器人又称跨介质飞行器[1],是一种可水空两栖巡航并能自由穿越水气界面的新概念海洋机器人[2]。为保证机器人的跨域航行性能,推进器需满足空中高速、小转矩和水下低速、大转矩两种工况,推进器的水空切换性能是其中的重难点[3-5]。基于涵道螺旋桨的水空两用推进器采用双电机、单螺旋桨的一体化设计方案实现空中和水下推进功能:在空中推进工况下,采用高速电机驱动螺旋桨转动;在水下推进工况下,采用低速电机驱动螺旋桨转动。为了实现水空两种工况的推进切换,需要设计一种结构紧凑、轻巧的超越离合器。
超越离合器是一种用于主从动件之间动力传递与分离的装置,国内外学者针对离合器接合特性开展了研究。CHESNEY等 [6]对离合器操作理论进行了总结,发现楔块质心位置的变化会影响离合器的接合特性。ROACH 等[7]通过理论分析对楔块式、滚柱式及棘轮式等离合器进行评估,并对接合特性进行了研究。NAGLER等[8]提出了一种改进接合触点的超越离合器,发现使用改进的设计标准可提高接合能力。卿茂辉[9]设计了一款楔块式超越离合器,研究了楔角变化对接合特性的影响规律。严宏志等[10]采用分解法和坐标变换建立了楔块重心位置模型,用ADAMS软件建立了斜撑离合器动力学模型,研究了不同重心位置的楔块对接触力及离合器接合、脱开性能的影响规律。
综上,针对离合器的优化设计研究多采用数值模型和仿真的方法,会忽略一些实际应用时工况的影响。本文根据水空两用推进器新需求,具体分析齿式超越离合器的结构参数对接合特性的影响,得到端面倒角和变位系数的最优设计参数,以优化离合器的接合特性。
1 齿式超越离合器设计与建模
水空两用推进器离合器的设计目的是使低速电机在水下与螺旋桨接合运转,在空气中与螺旋桨脱开。本文以离合器的啮合过程为切入点对其进行结构设计和动力学建模,得到满足实际工况的离合器虚拟样机模型。
1.1 齿式超越离合器结构设计
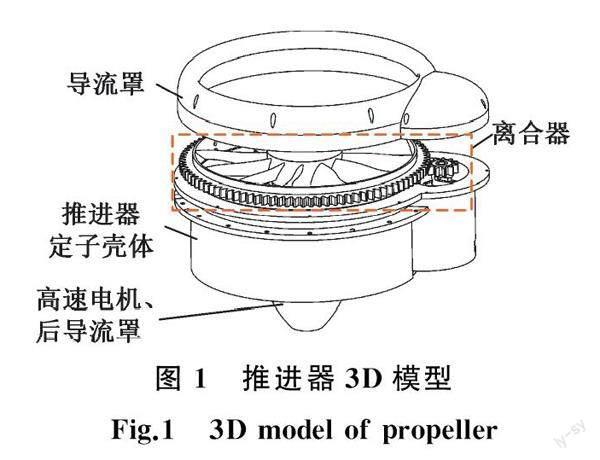
水空两用推进器采用双电机结构。考虑到结构的紧凑性等因素,两台电机采用轴向平行布局,也就是将用于水下推进的低速电机与空气中推进的高速电机平行布置。水空两用推进器采用基于齿轮组的超越离合器。离合器由从动部件(螺旋桨)、主动齿轮、电机轴、连接销轴四部分组成。推进器结构如图1所示,齿轮组离合器结构如图2所示。
水空两用推进器在水下运转时的转速范围为300~3000 r/min。在此工况下,仅低速电机工作,驱动电机轴旋转,带动穿过电机轴内部的销轴沿主动齿轮壳体上的螺旋滑槽移动[11]。销轴在速度差下通过离心力和惯性力使主动齿轮上移,使得主动齿轮与从动部件啮合。推进器停止运转时,低速电机反转,销轴在速度差下通过惯性力和电机驱动力使主动齿轮脱开啮合。低速电机传动的齿轮组均采用直齿圆柱齿轮[12]。在推进器水下运转过程中,高速电机不上电,但在螺旋桨的带动下低速旋转。
水空两用推进器在空气中运转时的转速范围为6000~20 000 r/min。在此工况下,高速电机工作,驱动螺旋桨运转,主动齿轮处于分离状态。为了提高主动齿轮的分离自锁稳定性,低速电机可反向运转。
1.2 设计参数
本文主要针对螺旋桨轮齿的端面倒角和主动齿轮的变位系数X开展齿轮结构参数的优化设计。对于端面倒角,主要优化倒角度数θ;针对深度的取值,对齿轮组进行强度理论计算和仿真校核,得知在齿厚为3 mm的情况下最大深度可取1 mm,倒角度数最大可取60°。故对倒角度数和变位系数的约束条件为
(1)
式中,Zmin为标准齿轮不根切最小齿数,取17;Z为变位齿轮齿数,取11;故计算出系数X的下限值为0.35。
将倒角度数θ和变位系数X作为仿真试验因子,以同步稳定运转、脱开到独立旋转的三个阶段下的接合、脱开时间和接触冲击力为仿真试验响應。在设计空间(约束范围)内,采用拉丁超立方抽样法[13]选取81组均匀样本点,得到81组不同倒角度数和变位系数的组合。
1.3 齿式超越离合器动力学建模
利用ADAMS动力学软件建立动力学模型。离合器的零部件均为刚体,并对模型添加自由度约束。主从动件依次设置接触力,采用接触冲击函数来模拟三维接触并求解接触力,接触冲击函数表达式为
(2)
式中,IMPACT()函数为接触冲击函数,是一种基于Hertz理论的函数,其含义为:用只抗压缩的非线性的弹簧阻尼方法近似计算出单边碰撞力;STEP()为阶跃函数,是一种特殊的连续时间函数,即从0跳变到1的过程,属于奇异函数;x为两物体的距离,x-为相对速度;x1为x的自由距离;k为接触表面的刚度系数;e为碰撞力指数;cmax为最大阻尼系数;d为接触表面的临界相互渗透量。
离合器工作时,螺旋桨需要克服流体阻力矩运转。螺旋桨在流体中旋转,螺旋桨所需的转矩T为
T=Kρω2D5(3)
式中,K为转矩系数(流体仿真得到);ρ为流体密度;ω为螺旋桨转速;D为螺旋桨直径。
将转矩T添加到螺旋桨的阻尼作用力上,设置主从动件采用的材料为锡青铜和硬质氧化铝合金,可得到式(2)、式(3)中的参数设置,具体见表1。
动力学分析时,忽略离合器在制造和安装过程中产生的误差。根据实际工况,施加约束条件如下:①主从动件的运动副均为旋转运动;②对主动齿轮与销轴、螺旋桨施加接触约束;③对主动齿轮与电机轴施加圆柱副,对电机轴施加旋转运动。
2 仿真与分析
2.1 离合器接合特性分析
离合器接合特性体现在接合、脱开时间和接触冲击力大小。对传动比i为8.6的齿轮组离合器进行动力学仿真,得到转速随时间变化如图3所示,接触力如图4所示。图3中,B、D点为完成接合与脱开时间点;AB段对应时长代表接合时间,CD段对应时长代表脱开时间。
由结果可知,螺旋桨在接合后出现了剧烈的转速波动和较大的接触冲击力。分析其原因如下。
(1)未经过优化的齿轮组接合时会出现多次轴向碰撞后仍无法成功接合的现象,会增加离合器接合、脱开所需的时间。且轴向碰撞次数越多,接合过程越不稳定,产生的接触冲击力会越大。为改善齿轮组的接合特性,对轮齿端部进行倒角修形,将螺旋桨轮齿下端切削成三角形,切削度数不同则接合特性不同。
(2)由于主动齿轮的齿数小于17,会产生根切,进而减弱轮齿接触强度和抗弯强度,导致轮齿损伤和发生变形;反映到离合器的接合特性上会减慢接合、脱开速度,降低接合过程的稳定性,使接触冲击力变大。为改善齿轮组的接合特性,对主动齿轮采用正变位,即变位系数X大于0;正变位后既避免了根切,又提高了轮齿的强度,进而提高了接合过程的稳定性。
综上,本文着重研究轮齿结构参数对接合特性的影响,将基于轮齿端面倒角度数θ和变位系数X开展离合器的优化设计。
2.2 仿真结果分析
结构参数的其他数值不变,将81组样本参数组合代入结构模型中仿真计算接合、脱开时间和接触冲击力。将结果数据整理得到结构参数对接合、脱开时长和接触冲击力的影响,如图5、图6所示。可得:θ约44°、X约0.84时,接合、脱开速度最快,接触冲击力最小。
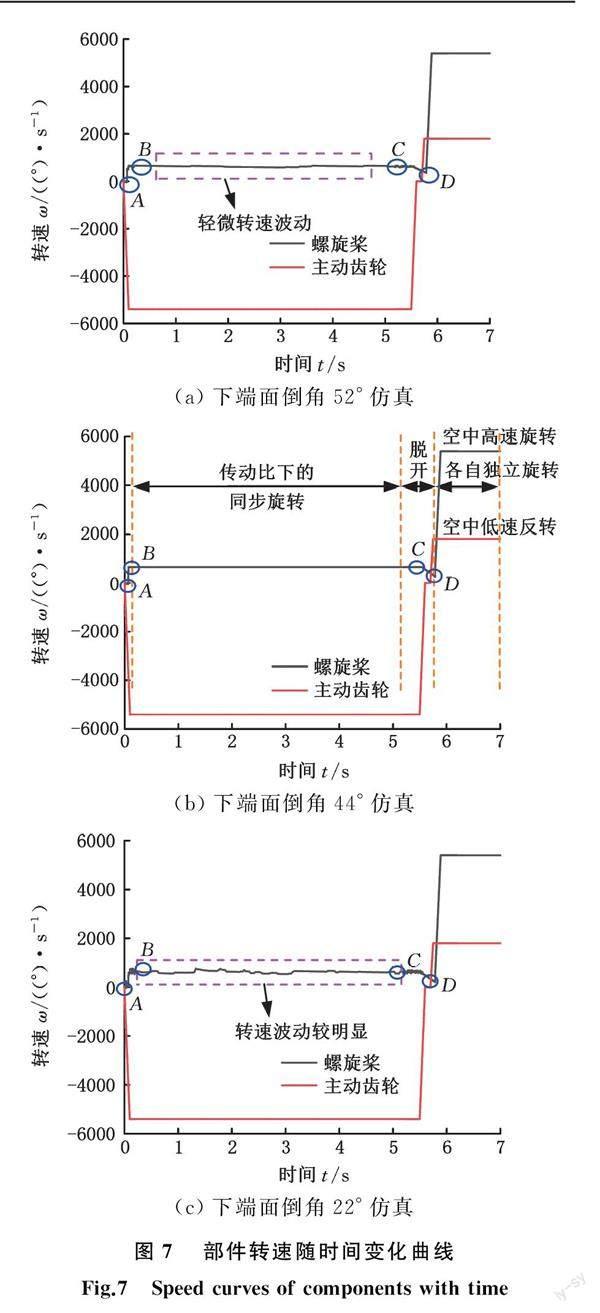
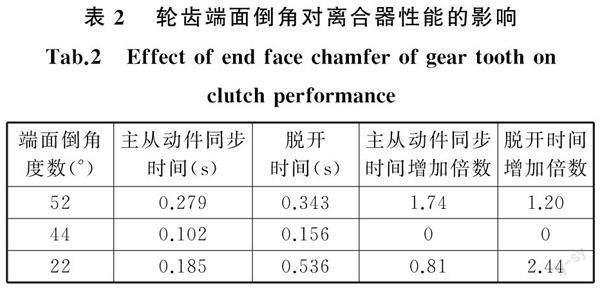
通过控制变量法对两设计变量深入分析。首先分析变位系数X不变、改变倒角度数θ对接合特性的影响,选取三组仿真结果如图7所示。第一组为采用接合特性最优的变位系数0.84时,倒角度数为44°的主从动件转速随时间变化曲线。其余两组倒角度数取值采用二分法的思想,取0°~44°和44°~60°的中值22°和52°进行分析,其接合特性指标见表2。
由表2可得:当θ为22°时,转速波动现象明显。θ增大至44°时,转速波动消失,且接合与脱开速度变快。再微增θ,转速波动现象出现,故可得出:θ约44°时,接合后转速平稳,离合器接合特性指标最好。
图8所示为接触力仿真结果,0.6 s后的接触力为恒定值1.86 N。可得:θ为44°时,接触冲击力最小,继续增大θ则接触冲击力变大,说明倒角度数对接合特性的影响较大。
对变位系数进行接合特性分析。分析倒角度数θ不变、改变变位系数X对接合特性的影响,选取三组仿真结果如图9所示。第一组为采用接合特性最优的倒角度数44°时,变位系数为0.84的主从动件转速随时间变化曲线。其余两组变位系数取值采用二分法的思想,取0.35~0.84和0.84~1的中值0.595和0.92进行分析,其接合特性指标见表3。可得: X为0.595时,接合过程出现了明显的转速波动现象;X增至0.84后,转速波动现象消失,接合、脱开过程平稳。当X增至0.92时,又出现了转速波动现象,稳定性下降。
图10所示为接触力仿真结果,0.6 s后的接触力为恒定值1.86 N。
由以上数据可得:X为0.84时,接触冲击力最小,继续增大X则接触冲击力变大;接合特性指标受端面倒角度数θ和变位系数X的影响较大。由仿真结果得出:θ为44°、X为0.84时的离合器接合特性为最优。
3 实验验证与分析
3.1 离合器样机研制与实验
根据上文分析结果试制的水空两用推进器和离合器样机实物如图11所示。
为检验仿真分析结果的准确性,研制了不同设计参数下的离合器样机,进一步研究离合器的接合特性。具体方案如下: 主动齿轮端和螺旋桨通过低速电机和高速电机控制器来调节转速。接触冲击力通过安装在测试壳体上的ATI六维力传感器来采集。
对于螺旋桨和主动齿轮端的转速数据,采用组合有电压、电流及转速传感器的数据采集板卡采集。离合器和推进器性能实验原理如图12所示。离合器和推进器样机实验照片见图13。
3.2 结果与分析
针对端面倒角度数θ对接合特性影响的实验结果如图14所示。实验的参数组合与2.2节相同,不同参数下主动齿轮的驱动转速相同,如图14b所示。图中a、b和c点代表完成接合时间点,a1、b1和c1代表结束脱开时间点。图14c所示为接触力实验结果。
由实验结果可知,当倒角度数为22°、44°和52°时,离合器的接合时间分别约为0.21 s、0.093 s和0.31 s,脱开时间分别为0.6 s、0.142 s和0.38 s,接触冲击力分别为-3.91 N、0.265 N和-0.28 N,呈现明显的先减小后增大趋势。44°时接合、脱开速度最快,冲击力最小。这与2.2节的影响规律一致。
针对变位系数X对接合特性影响的实验结果如图15所示。实验的参数组合与2.2节对应,不同参数下主动齿轮的驱动转速相同,如图15b所示。图15c所示为接触力实验结果。
由实验结果可知,当变位系数为0.595、0.84和0.92时,离合器的接合时间分别约为0.49 s、0.093 s和0.3 s,脱开时间分别为0.76 s、0.142 s和0.61 s,接触冲击力分别为-14.01 N、0.265 N和-5.34 N,呈现明显的先减小后增大趋势。变位系数为0.84时接合、脱开速度最快,冲击力最小。这与2.2节的影响规律一致。
根据仿真与实验的分析结果,得到接合特性最优时端面倒角度数和变位系数分别为44°和0.84。其仿真与实验的接合特性对比见表4。可以看出,仿真与实验的相对误差小于10%。且在仿真与实验的分析过程中,倒角度数和变位系数对离合器接合特性的影响规律较吻合。这表明仿真结果对实际设计具有很高的参考价值。
4 结论
本文设计了一种齿式超越离合器,基于动力学理论建立了离合器的结构模型,应用动力学仿真软件对离合器的结构和各工况下的动力学特性进行了仿真分析,得到了轮齿的结构参数对接合特性的影响规律。最后通过样机实验验证了仿真设计结果的正确性,证明了通过优化轮齿端面结构和变位系数可以改善齿式超越离合器的接合特性。具体结论如下:
(1)当端面倒角度数和變位系数分别为44°和0.84时,齿式超越离合器的接合特性最优。
(2) 实验结果验证了仿真分析结果的正确性和有效性,仿真与实验的相对误差小于10%,证明了优化设计过程的有效性。
参考文献:
[1]MAIA M M, SONI P, DIEZ F J. Demonstration of an Aerial and Submersible Vehicle Capable of Flight and Underwater Navigation with Seamless Air-water Transition[J]. ArXiv, 2015, 15(7):19-32.
[2]鲍杨春. 跨介质航行器流体动力外形组合仿生设计与气动特性分析[D].长春:吉林大学, 2019.
BAO Yangchun. Combinatorial Biomimetic Design of Fluid Dynamic Shape and Analysis of Aerodynamic Characteristics for Cross-media UAV[D]. Changchun:Jilin University, 2019.
[3]朱莎. 水空两用无人机动力系统设计与研究[D]. 南昌:南昌航空大学, 2012.
ZHU Sha. The Design and Research of Power System in Water-air UAV[D]. Nanchang:Nanchang Hangkong University, 2012.
[4]王同苏. 深海无人潜器高效推进器的设计研究[D]. 哈尔滨:哈尔滨工程大学, 2012.
WANG Tongsu. Research on Efficient Thruster of Deep Sea Unmanned Submersible[D]. Harbin:Harbin Engineering University, 2012.
[5]郜天柱,胡志強,杨翊,等. 水空两栖涵道风扇推进器推力理论分析及实验验证[J]. 机器人, 2019, 41(2):222-231.
GAO Tianzhu, HU Zhiqiang, YANG Yi, et al. Theoretical Analysis and Experimental Verification on Thrust of Aquatic-aerial Amphibious Ducted Fan Propeller[J]. Robot, 2019, 41(2):222-231.
[6]CHESNEY D R, KREMER J M. Generalized Equations for Sprag One-way Clutch Analysis and Design[J]. SAE Transactions, 1998, 107(6):1582-92.
[7]ROACH G M, HOWELL L L. Evaluation and Comparison of Alternative Compliant Overrunning Clutch Designs[J]. Journal of Mechanical Design, 2002, 124(3):485-491.
[8]NAGLER N, LOHRENGEL A. Improved Design Criterion for Frictionally Engaged Contacts in Overrunning Clutches[J]. Forschung im Ingenieurwesen—Engineering Research, 2021, 85(4):1053-1063.
[9]卿茂辉. 对数型面楔块斜撑离合器接合特性及磨损寿命分析[D].长沙:中南大学, 2014.
QING Maohui. Analysis on Engagement Characteristics and Wear Life of Sprag Clutch of the Logarithmic Surfaces Wedge[D]. Changsha:Central South University,2014.
[10]严宏志,王志标,朱楚,等.楔块重心位置对斜撑离合器性能的影响[J].中国机械工程,2021,32(3):253-260.
YAN Hongzhi, WANG Zhibiao, ZHU Chu, et al. Effects of Gravity Center Position of Sprags on Sprag Clutch Performance[J]. China Mechanical Engineering,2021,32(3):253-260.
[11]孔繁征. 一种涡喷发动机启动离合器:CN211116279U[P].2020-07-28.
KONG Fanzheng. A Turbojet Engine Starting Clutch:CN211116279U[P].2020-07-28.
[12]李树军,刘杰,王丹,等.机械原理[M].北京:科学出版社,2009:134-153.
LI Shujun, LIU Jie, WANG Dan, et al. Mechanical Principle[M]. Beijing:Science Press, 2009:134-153.
[13]张琳, 魏超, 胡纪滨.高速多片湿式离合器低带排转矩参数优化设计[J]. 汽车工程, 2020, 42(8):1074-1081.
ZHANG Lin, WEI Chao, HU Jibin. Optimization Design of Low Drag Torque Parameters of High-speed Multi-plate Wet Clutch[J]. Automotive Engineering, 2020, 42(8):1074-1081.
(编辑 陈 勇)
作者简介:
徐 龙,男,1995年生,硕士研究生。研究方向为跨域海洋机器人推进器设计与优化、超越离合器设计、优化及性能。发表论文1篇。
胡志强(通信作者),男,1980年生,研究员、博士研究生导师。研究方向为海洋机器人总体设计等。获中国科学院杰出科技成就奖(集体)1项,发表论文70余篇。E-mail:hzq@sia.cn。
收稿日期:2022-07-13
