
融合稳定性的分布式驱动电动汽车路径跟踪控制策略研究
2023-11-28 10:46王姝张海川赵轩宋函锟
中国机械工程 2023年9期
关键词:汽车工程
王姝 张海川 赵轩 宋函锟

摘要:提出了一種融合车辆稳定性的路径跟踪控制策略,以提高分布式驱动电动汽车在高速、低附着等危险行驶工况下的路径跟踪精度和车辆稳定性,该控制策略包括路径跟踪控制层、稳定性控制器决策层、驱动轮转矩分配层。针对LQR路径跟踪控制器在高速大曲率工况下跟踪精度不足的问题,采用闭环PID矫正驾驶员模型补偿车辆前轮转角,并设计稳定性控制器用以跟踪车辆理想参考模型,基于模型预测控制算法决策出附加横摆力矩,同时以轮胎负荷率最小为目标优化车轮驱动转矩分配。利用自主开发的分布式驱动电动试验车分别在高速高附着和高速低附着双移线工况进行试验。结果表明:相对于只运用闭环PID矫正的LQR路径跟踪控制器进行路径跟踪,车辆在干燥的混凝土路面以90 km/h速度行驶时,融合车辆稳定性的路径跟踪精度的横向均方根误差降低了29.7%;车辆在潮湿沥青路面以70 km/h速度行驶时,均方根误差降低了10.3%。所提控制策略能够提高车辆的路径跟踪精度,满足车辆在危险行驶工况下的横摆稳定性。
关键词:汽车工程;分布式驱动电动汽车;路径跟踪;稳定性控制
中图分类号:U461
DOI:10.3969/j.issn.1004-132X.2023.09.003
Research on Path Tracking Control Method of Distributed Drive ElectricVehicles with Integrated Stability
WANG Shu ZHANG Haichuan ZHAO Xuan SONG Hankun
Abstract: A path tracking control strategy with integrated vehicle stability was proposed to improve the path tracking precision and vehicle stability of distributed drive electric vehicles under dangerous driving conditions such as high speed and low adhesion conditions. The hierarchical structure path tracking control strategy with vehicle stability, including the path tracking control layer, the stability controller decision layer and the drive wheel torque distribution layer. To solve the problem of the lower accuracy of LQR path tracking controller under high-speed and large curvature conditions, a closed loop PID correction driver model was used to compensate the front wheel angle of the vehicles. In addition, the stability controller was designed to track the ideal reference model of the vehicles. The controller developed the model predictive control algorithm to generate additional yaw moment. Meanwhile, the controller realized the optimal distribution of the wheel drive torques with the objective of minimizing tire load rate. Based on the independently designed distributed drive electric test vehicle, the double lane change tests were carried out on high-speed high adhesion road surfaces and high-speed low adhesion road surfaces respectively. The results show that, when driving on dry concrete pavement at 90 km/h speed, the lateral root mean square errors of the path tracking precision with integrated dynamics stability reduce by 29.7%, compared to the LQR path tracking controller using only closed-loop PID correction for path tracking. When driving on wet asphalt pavement at 70 km/h speed, the lateral root mean square errors reduce by 10.3%. Therefore, the proposed path tracking control strategy with integrated vehicle stability of distributed drive electric vehicles may improve path tracking accuracy, ensuring yaw stability under extreme conditions effectively.
Key words: automotive engineering; distributed drive electric vehicle; path tracking; stability control
0 引言
路徑跟踪控制是实现汽车智能化的关键技术,它通过车辆状态信息和预先规划好的期望路径,实时控制前轮转角大小,确保车辆按照预期路径行驶[1]。但汽车在高速、大曲率行驶时,轮胎容易达到饱和状态,路径跟踪控制器决策出的前轮转角很难满足控制需求。同时,在高速低附着路面下,汽车过弯时容易发生侧滑、甩尾等危险工况,导致车辆的路径跟踪精度进一步降低。分布式驱动电动汽车的4个车轮驱动/制动力矩独立可控,为直接横摆力矩控制提高车辆安全性提供平台[2],因此,分布式驱动电动汽车在进行路径跟踪控制时,可以综合考虑车辆稳定性及道路条件。
LEMAN等[3]基于三自由度非线性车辆动力学模型设计了模型预测路径跟踪控制器,但没有考虑车辆高速行驶稳定性问题。张雷等[4]利用轨迹跟踪与直接横摆力矩协调控制设计了上层控制器以生成前轮转角和目标横摆力矩,下层控制器分配4个车轮驱动转矩,提高了车辆在高速、低附着路面的路径跟踪精度和稳定性。刘凯等[5]基于包络线的轮胎滑移率约束条件设计了模型预测轨迹跟踪控制器,满足高速车辆在各种路面的行驶能力。GUO等[6]针对分布式驱动自动驾驶车辆,设计了一种协调路径跟踪和直接横摆力矩控制的分层控制系统,上层利用模型预测算法计算前轮转角和横摆力矩,下层利用伪逆算法分配车轮驱动力矩。李军等[7]通过融合车辆稳定性来设计路径跟踪控制器,利用质心侧偏角相平面图判断稳定性控制器的工作区域,从而将稳定性约束条件从路径跟踪控制器中独立出来,简化了路径跟踪控制器的复杂度,提高了系统的工作计算效率和可靠性。
以上路径跟踪控制器的设计多是利用模型预测控制算法,能解决带约束控制问题,但存在预测时域较大、耗时较长的缺点[8]。工业领域多采用LQR控制算法来跟踪预期路径。XU等[9]利用LQR控制算法设计了多点预瞄控制的车辆路径跟踪控制器,提高了路径跟踪精度,但没有考虑车辆高速、大曲率转弯时车辆行驶工况。陈亮等[10]通过LQR控制器计算车轮期望侧偏力,利用刷子轮胎模型将其转化为侧偏角,保持了车辆与轮胎模型的非线性特性。此外,针对车辆的非线性动力学特性,管欣等[11]设计了BP神经网络PID控制器复合校正模型,克服了轮胎滑移区跟踪精度不足的缺点。LI等[12]利用LQR控制算法计算减小航向角偏差所得到的车轮转角,与位置偏差得到的前轮转角通过一定权重组合在一起,使车辆适应高速、大曲率工况。
上述对LQR算法的修正并不能克服车辆在高速、低附着路面的侧滑、甩尾等危险行驶工况,故有必要引入稳定性控制策略。HSU等[13]通过最优分配车轮驱动/制动扭矩,提高车辆路径跟踪性能。WANG等[14-15]针对双电机后轮驱动电动汽车,提出了基于模型预测控制算法的稳定性控制策略,试验表明车辆稳定性得到提高。但上述方法都只针对车辆稳定性控制,未考虑前轮转角。
针对上述问题,本文针对分布式驱动电动汽车设计了融合车辆稳定性的路径跟踪模型。基于LQR算法设计具有预瞄特性的路径跟踪控制器,同时采用PID矫正环节补偿车辆高速大曲率工况下轮胎滑移区的位置跟踪偏差;通过设计直接横摆力矩控制器,以整车质心侧偏角、横摆角速度跟踪理想二自由度参考模型为目标计算附加横摆力矩,并利用优化算法分配车轮驱动力矩来提高车辆在高速低附着路面上的横摆稳定性。
1 融合车辆稳定性的路径跟踪控制策略
1.1 七自由度车辆动力学模型
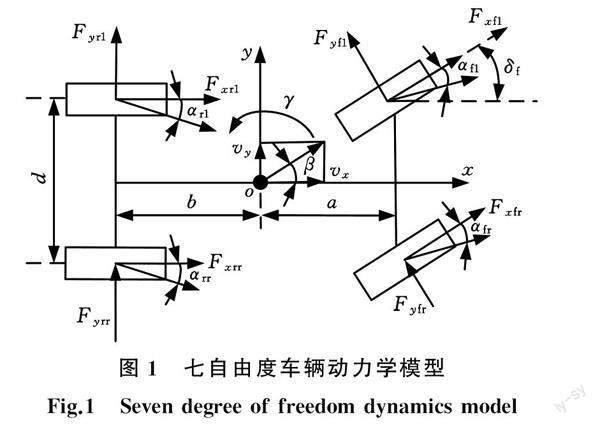
高速低附着路面上行驶,相对于整车侧翻,更容易发生侧滑、甩尾等危险行驶工况,因为地面附着条件的限制,侧滑的临界条件相对于侧翻更先达到,所以主要考虑纵向、横向、横摆3个自由度,同时考虑到分布式驱动电动汽车4个驱动电机独立可控,本文构建七自由度车辆动力学模型,如图1所示。
式中,m为车辆质量;vx、vy分别为车辆质心的纵向、横向速度;ωr为绕z轴的横摆角速度;Iz为车辆绕z轴的转动惯量;a、b分别为车辆质心到前后轴的距离;d为整车轮距;δf为汽车前轮转角;Fxij、Fyij分别为4个车轮的纵向力、侧偏力,ij=fl,fr,rl,rr分别表示左前轮、右前轮、左后轮、右后轮;Jw为车轮转动惯量;ωij为4个车轮的旋转角速度;Tdij为4个轮胎的驱动力矩;rr为车轮滚动半径。
5 试验验证分析
本文基于分布式驱动电动试验车,利用A&D5435半实物仿真系统及MATLAB/Simulink的代码自动生成技术搭建了分布式驱动电动汽车试验平台,对构建的基于直接横摆力矩控制的双电机驱动电动汽车稳定性控制系统进行试验验证。A&D5435虚拟控制器替代车辆的整车控制器,控制器输入信号包括转向盘转角、转向盘角速度、转向盘扭矩、油门踏板开度、制动踏板开度、车速、轮速、电机扭矩、电机功率等,输出信号包括电机驱动扭矩、电机制动扭矩、液压制动系统制动扭矩。上述输入信号可以通过以下传感器获得:使用安装在转向柱上的SensorWay公司的转向盘扭矩、角度传感器采集转向盘转角、转向盘角速度、转向盘扭矩;使用霍尔式非接触速度传感器采集4个车轮的转速;采用Passat B5双路加速踏板传感器采集加速踏板开度;采用制动踏板传感器采集制动踏板开度;采用三轴陀螺仪采集车辆的纵向加速度、侧向加速度、横摆角速度;电机转速、扭矩、功率信息可以从电机控制器的CAN信号中获取。车辆参数见表1。基于A&D5435的分布式驱动电动汽车试验平台如图6所示。
为了验证所提控制策略的效果,本文在高速高附着和高速低附着双移线工况进行试验。选择ISO/ TR3888-1规定的标准双移线试验轨迹作为参考路径,如图7所示。
文中模型1为本文中融合车辆稳定性的路径跟踪控制器;模型2为闭环PID矫正的LQR路径跟踪控制器,只進行横向跟踪控制;模型3为LQR横向路径跟踪控制器,只进行横向跟踪控制。
5.1 干燥的混凝土路面
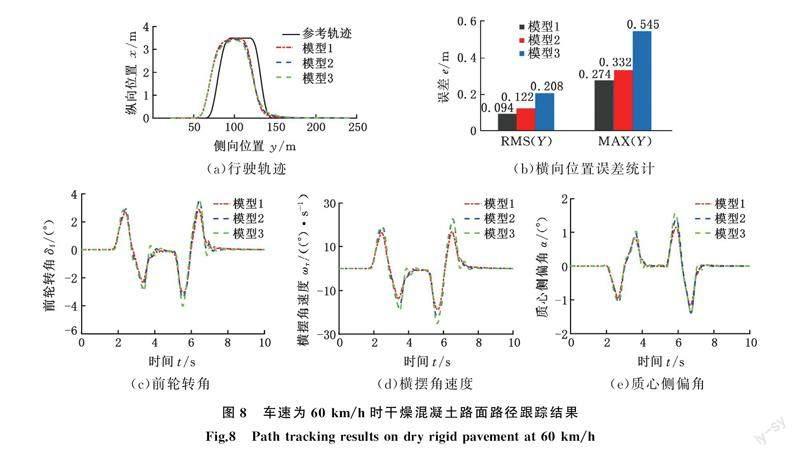
选择在附着系数为0.8的干燥的混凝土路面分别进行车速为60,90 km/h的试验,如图8、图9所示。
由图8a、图8b、图9a、图9b可以看出,车速为60 km/h时,三种模型均可保证车辆跟踪参考轨迹,仅在弯道处存在很小偏差,目标路径跟踪效果良好,模型3最大横向误差为0.545 m;当车速增加到90 km/h时,模型3最大跟踪偏差达到2.341 m,跑偏严重,模型1相对于模型2均方根误差减小了29.7%,在减小车身姿态波动的同时,改善了路径跟踪精度。图8c、图9c表明,两种车速下,模型1具有最小的前轮转角,最大前轮转角不超过4°,且转角波动平缓,有利于提高路径跟踪精度和操纵稳定性。由图8d、图8e、图9d、图9g可以看出,60 km/h时,3种模型横摆角速度与质心侧偏角的值接近一致,趋于稳定值;当车速增加到90 km/h时,模型1相对于模型2横摆角速度和质心侧偏角幅值降低,说明高速行驶时模型1整车稳定性最好。图9e所示为90 km/h时下层控制器分配的四个车轮驱动力矩,图9f为相应的轮胎负荷率,根据式(34),为了追求更高的稳定性,前轴车轮利用率权重系数小于后轴,因此图9e中车轮驱动力矩方面前轮明显高于后轮,且轮胎负荷率低于0.5,结果表明,驱动力分配在保证足够侧向附着能力的同时,提高了整车稳定行驶能力。
5.2 潮湿沥青路面
选择附着系数为0.5的潮湿沥青路面进行车速为70 km/h的试验,如图10所示。
图10a、图10b表明,模型1控制器均方根误差相对于模型2减小了10.3%,跟踪效果最好,LQR控制的模型3在弯道处可能发生侧滑,横向误差最大,达到1.415 m。由图10c可以看出,相对于模型2、模型3,模型1的前轮转角变化平缓,幅值最小,不超过3°,有利于在低附着路面行驶。图10d、图10g表明,模型1跟模型2、模型3相比,横摆角速度、质心侧偏角波动小、幅值低,提高了整车冰雪路面的行驶稳定性。图10e、图10f所示分别为下层控制器分配的四个车轮驱动力矩和对应的轮胎负荷率,负荷率低于0.5,表示可以提供整车转弯行驶所需侧向力。
6 结语
在高速、大曲率或低附着路面下,采用融合稳定性的路径跟踪器的车辆路径跟踪精度有明显提高,且具有更好的行驶稳定性。本文中LQR控制器的加权矩阵、预瞄时间为人工调试得到,对复杂工况适应性差,危险行驶工况的路径跟踪精度也可通过参数调节得到一定程度的改善。
参考文献:
[1]VIVERK K, SHETA M A, GUMTAPURE V.A Comparative Study of Stanley, LQR and MPC Controllers for Path Tracking Application (ADAS/AD)[C]∥2019 IEEE International Conference on Intelligent Systems and Green Technology (ICISGT). Visakhapatnam, 2020:67-71.
[2]HU J S, WANG Y, FUJIMOTO H, et al. Robust Yaw Stability Control for In-wheel Motor Electric Vehicles[J]. IEEE/ASME Transactions on Mechatronics, 2017,22(3):1360-1370.
[3]LEMAN A, ARIFF M, ZAMZURI H, et al. Model Predictive Controller for Path Tracking and Obstacle Avoidance Manoeuvre on Autonomous Vehicle[C]∥12th Asian Control Conference (ASCC), Kitakyushushi,2019:1271-1276.
[4]张雷,赵宪华,王震坡. 四轮轮毂电机独立驱动电动汽车轨迹跟踪与横摆稳定性协调控制研究[J]. 汽车工程, 2020, 316(11):68-76.
ZHANG Lei, ZHAO Xianhua, WANG Zhenpo. Study on Coordinated Control of Trajectory Tracking and Yaw Stability for Autonomous Four-wheel-independent-driving Electric Vehicles[J]. Automotive Engineering, 2020, 316(11):68-76.
[5]刘凯, 陈慧岩, 龚建伟,等.高速无人驾驶车辆的操控稳定性研究[J]. 汽车工程, 2019, 41(5):514-521.
LIU Kai, CHEN Huiyan, GONG Jianwei, et al. A Research on Handling Stability of High-speed Unmanned Vehicles[J]. Automotive Engineering,2019, 41(5):514-521.
[6]GUO Jinghua, LUO Yugong, LI Keqiang, et al. Coordinated Path-following and Direct Yaw-moment Control of Autonomous Electric Vehicles with Sideslip Angle Estimation[J].Mechanical Systems and Signal Processing, 2018,105:183-199.
[7]李军, 唐爽, 黄志祥,等. 融合稳定性的高速无人驾驶车辆纵横向协调控制方法[J].交通运输工程学报, 2020,20(2):205-218.
LI Jun, TANG Shuang, HUANG Zhixiang, et al. Longitudinal and Lateral Coordination Control Method of High Speed Unnamed Vehicles with Integrated Stability[J]. Journal of Traffic and Transportation Engineering, 2020, 20(2):205-218.
[8]KAI L, GONG J, KURT A, et al. Dynamic Modeling and Control of High-speed Automated Vehicles for Lane Change Maneuver[J]. IEEE Transactions on Intelligent Vehicles, 2018, 3(3):329-339.
[9]XU S, PENG H. Design, Analysis, and Experiments of Preview Path Tracking Control for Autonomous Vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2020,21(1):48-58.
[10]陈亮,秦兆博,孔伟伟,等. 基于最优前轮侧偏力的智能汽车LQR横向控制[J].清华大学学报(自然科学版), 2021,61(9):906-912.
CHEN Liang, QIN Zhaobo, KONG Weiwei, et al. Lateral Control Using LQR for Intelligent Vehicles Based on the Optimal Front-tire Lateral Force[J]. Journal of Qsinghua University(Science and Technology), 2021,61(9):906-912.
[11]管欣,陈永尚,贾鑫,等.预瞄跟随驾驶员模型的复合校正[J].汽车工程,2018,40(3):297-304.
GUAN Xin, CHEN Yongshang, JIA Xin, et al. Compound Correction of Preview Following Driver Model[J]. Automotive Engineering, 2018,40(3):297-304.
[12]LI H Z, LI L, SONG J, et al. Comprehensive Lateral Driver Model for Critical Maneuvering Conditions[J]. International Journal of Automotive Technology, 2011, 12(5):679-686.
[13]HSU L Y, CHEN T L. An Optimal Wheel Torque Distribution Controller for Automated Vehicle Trajectory Following[J]. IEEE Transactions on Vehicular Technology, 2013, 62(6):2430-2440.
[14]WANG S, ZHAO X, YU Q, et al. Research on Strategy of the Stability Control System of Dual-motor Drive Electric Vehicle[C]∥2019 IEEE International Symposium on Circuits and Systems (ISCAS). Sapporo, 2019:18815602.
[15]WANG S, ZHAO X, YU Q. Vehicle Stability Control Strategy Based on Recognition of Driver Turning Intention for Dual-motor Drive Electric Vehicle[J]. Mathematical Problems in Engineering:Theory, Methods and Applications, 2020:3143620.1-3143620.18.
[16]陸子玉. 四轮转向汽车操纵性和稳定性的联合优化及仿真研究[D].南京:南京航空航天大学, 2007.
LU Ziyu. Joint Optimization and Simulation Research of 4WS Vehicle Handling and Stability[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2007.
[17]王姝,赵轩,余强,等.基于驾驶人转向意图的双电机驱动电动汽车稳定性控制策略研究[J].中国公路学报,2022, 35(1):334-349.
WANG Shu, ZHAO Xuan, YU Qiang, et al. Research on Vehicle Stability Control Strategy for Dual-motor Drive Electric Vehicle Considering Driver Steering Intention[J]. China Journal of Highway and Transport,2022, 35(1):334-349.
[18]陈荫三,余强. 汽车动力学[M]. 4 版.北京:清华大学出版社, 2009.
CHEN Yinsan, YU Qing. Vehicle Dynamic System [M].4th ed .Beijing:Tsinghua University Press,2009.
[19]钱丹剑.分布式驱动电动汽车横摆力矩控制与转矩分配研究[D].长春:吉林大学,2015.
QIAN Danjian. Study on Yaw Moment Control and Torque Distribution for Distributed Drive Electric Vehicles[D].Changchun:Jilin University, 2015.
(编辑 陈 勇)
作者简介:
王 姝,女,1991年生,高级工程师。研究方向为电动汽车控制。
赵 轩(通信作者),男,1983年生,教授、博士研究生导师。E-mail:zhaoxuan@chd.edu.cn。
收稿日期:2022-02-22
基金项目:国家自然科学基金(52002034);陕西省科技重大专项(2020zdzx06-01-01);霍英东青年教师基金(171103);陕西省重点产业创新链(群)项目(2020ZDLGY16-01,2020ZDLGY16-02)
猜你喜欢
课程教育研究(2018年2期)2018-03-15
科技创新导报(2017年31期)2018-02-03
考试周刊(2018年4期)2018-01-06
科技资讯(2017年28期)2017-11-25
教育教学论坛(2017年32期)2017-08-29
科技资讯(2017年16期)2017-07-14
山东工业技术(2017年12期)2017-07-06
湖南大学学报·自然科学版(2015年10期)2015-11-30
教育教学论坛(2014年16期)2014-09-01
