
基于2D激光位移传感器的舱段自动对接测量方法
2023-11-28 09:40孙露萍张文昌王志华王振文任志墨张倩
中国机械工程 2023年9期
孙露萍 张文昌 王志华 王振文 任志墨 张倩
摘要:针对舱段对接装配需求,结合舱段对接工艺过程,提出一种基于2D激光位移传感器的舱段自动对接测量方法。首先将待对接舱段调整至相距基准舱段约50 mm待装位,采用2D激光位移传感器检测两舱段对接处三个点位的2D轮廓偏差,计算得到待对接舱段除自转角外的5个自由度位姿;然后根据两舱段法兰端面上的豁口特征,通过扫描两个舱段法兰豁口位置,计算得到待对接舱段自转角;最后将结果反馈至控制系统,驱动执行机构进行位姿的调整。通过引入误差的仿真并结合对接实验对所提方法进行了验证,结果表明,所提方法测量精度高,对接效果良好,能够满足舱段自动对接需求,有效提高了自动对接系统的效率、稳定性和一致性。
关键词:舱段自动对接;2D激光位移传感器;图像处理;位姿测量
中图分类号:TP242
DOI:10.3969/j.issn.1004-132X.2023.09.013
Measurement Method of Cabin Automatic Docking Based on 2D Laser Displacement Sensor
SUN Luping1,3 ZHANG Wenchang1,3 WANG Zhihua WANG Zhenwen1,3 REN Zhimo1,3 ZHANG Qian1,3
Abstract: In view of the docking and assembly requirements of the cabins, a method for automatic docking measurement was proposed based on 2D laser displacement sensor in combination with the docking processes of the cabins. The displacement sensors detected the 2D contour deviation of the three points at the docking points of the two cabins, and calculated the pose of the cabins to be docked with 5 degrees of freedom except for the rotation angle; The positions of the flange gap in the cabins were calculated to obtain the rotation angle of the cabins to be docked. Finally, the results are fed back to the control system to drive the actuator to adjust the pose. The proposed method was verified by introducing error simulation and combining with docking experiments. The results show that the automatic docking method has high measurement accuracy and good docking effectiveness, which may meet the needs of cabin automatic docking, and improve the efficiency and stability of the automatic docking systems effectively.
Key words: cabin automatic docking; 2D laser displacement sensor; image processing; pose measurement
0 引言
舱段对接是航天领域生产制造中的重要一环,对接的精度和稳定性直接影响总体性能的优劣。目前国内舱段对接作业采用人工的方式,对接效率低,质量难以保证。舱段对接中,两舱段相对位姿测量的精度和效率是该任务的需求难点,因此,研发高精度、高效率的舱段自动对接系统具有十分重要的现实意义。
早期的舱段类部件测量方式是通过三坐标测量机和关节式测量臂完成的,但装置体积大并且需要人力移动测头完成测量,难以满足自动化需求,并且这种接触式测量方法可能会对表面造成损伤 [1-2]。国内外研究人员提出采用激光跟踪仪的非接触式测量方法完成舱段位姿测量[3-4],这种方法精度高,测量范围广,但该测量手段需借助靶标,即先将靶标布置在被测物体上,再使用激光跟踪仪采集靶标位置计算舱段位姿,不便于现场实施[5-8]。近年来,机器视觉技术的快速发展为工业自动化提供了新思路。宋兴君[9]通过在舱段布置多个特征点,结合双目视觉技术检测特征点的三维坐标,完成了舱段姿态的测量。金贺荣等[10-11]同样基于该模式的双目视觉技术,提出了一种矢量位姿求解方法,获得了较好的测量效果。2D激光轮廓传感器的出现为脱离靶标的测量方式提供了新思路。上海航天精密机械研究所和西安电子科技大学提出了一种多传感器測量的舱段自动对接方法,使用2D激光轮廓传感器扫描舱体外轮廓计算除自转角外的5个自由度位姿,使用CCD传感器测量舱段自转角,完成舱段的整体位姿测量[12-14],受限于传感器测量范围,针对大直径舱段的高精度测量,该方法代价较高。
本文结合舱段对接工艺过程,提出了一种基于2D激光位移传感器的舱段自动对接方法。首先将两个舱段调整至相距约50 mm处,采用2D激光位移传感器检测两舱段对接处三个点位的2D轮廓偏差,计算得到两舱段除自转角外的5个自由度位姿;根据舱段法兰对接面上的豁口特征,通过扫描两个舱段法兰豁口位置,计算得到舱段自转角。最后将结果反馈至控制系统,驱动执行机构进行位姿的调整。通过引入误差的仿真并结合对接实验对所提方法进行了验证。
1 舱段位姿测量硬件系统
1.1 硬件系统的搭建
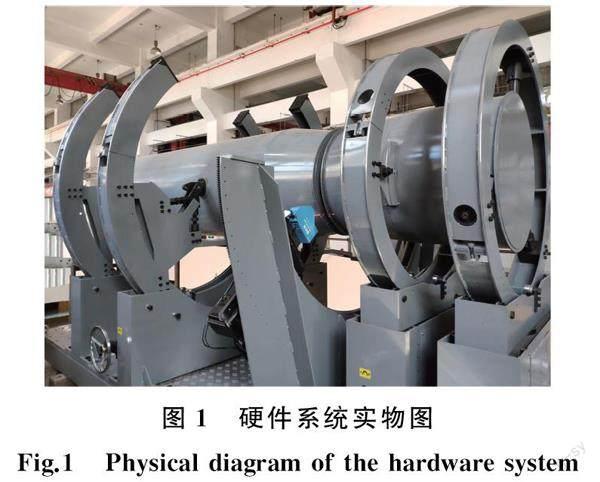
舱段对接系统的整体实物图见图1,该系统主要由舱段、舱段位姿测量单元、控制系统和执行机构组成。其中,舱段由基准舱段和待对接舱段两部分组成,两舱段的法兰上均匀分布着同等大小的销孔,在两舱段法兰的底部分别有一个径向宽度50 mm、轴向深度30 mm的豁口;舱段位姿测量单元由2D激光位移传感器、工控机、图像处理软件组成;执行机构由4个抱环、4个支撑小车、导轨等组成。
图2为该测量系统的局部实物图,2D激光位移传感器通过连接板安装在环形轨道上,可以实现在轨道上匀速运动。通过采集舱段对接处不同位置的轮廓数据及底部两舱段的豁口轮廓信息计算两舱段的相对位姿,最后将姿态数据反馈至控制系统,由控制系统驱动执行机构调整舱段的位姿,完成对接作业。
1.2 2D激光位移传感器
2D激光位移传感器由激光发射器和CCD相机组成,其工作原理如图3所示,激光发射器垂直投射到被测工件表面,相机以θ角对工件表面的激光条纹进行采集。由于受到待测工件表面实际形状的影响,激光发射器投射的直线型激光会发生变形,相机记录变形的待测表面激光信息。因为CCD相机、激光发射器和被测工件之间的位置关系是确定的,故使用光学三角测量法建立该图像采集系统的数学模型,可以快速对被测物体表面深度信息進行计算,根据得到的数据即可还原出被测物体的表面三维形貌。
以传感器端面某一点为原点,定义传感器局部坐标系OcXcYcZc,沿着激光线方向为Xc,沿着物体扫描方向为Yc,传感器深度方向为Zc。
2 舱段的位姿计算
2.1 姿态测量原理
如图4所示,以基准舱段端面中心为原点,定义基坐标系ObXbYbZb,舱段端面的轴线方向定义为Xb轴,舱段端面水平方向定义为Yb,舱段端面竖直方向定义为Zb。定义传感器全局坐标系OwXwYwZw,其方向和基坐标系方向一致。
待对接舱段的相对位姿记为(xb,yb,zb,α,β,γ),其中xb、yb、zb表示待对接舱段相对于基准舱段的平移关系,α、β、γ表示待对接舱段相对于基准舱段绕三个轴的旋转关系。待对接舱段端面圆中心坐标记为Om,即
采用2D激光位移传感器在三个检测位置对两舱段对接圆上的三对点位进行检测,得到舱段端面的轮廓偏差,使用位姿求解算法求得两舱段除自转角α外的5个自由度位姿,再使用该激光位移传感器对两舱段底部的豁口处进行径向扫描得到两个豁口的径向偏差S,进而计算得到自转角α,从而完成两舱段相对位姿的测量。
2.2 位姿求解算法
采用2D激光位移传感器获得基准舱段中Q1、Q2、Q3和待对接舱段中Q′1、Q′2、Q′3处的轮廓偏差转化至传感器局部坐标系中,表示为Pc11、Pc12、Pc13、Pc21、Pc22、Pc23。将这六个点从传感器局部坐标系中转化到传感器全局坐标系下表示为Pw11、Pw12、Pw13、Pw21、Pw22、Pw23,即
式中,R1为检测位置2的传感器局部坐标系到传感器全局坐标系的旋转矩阵;T1为检测位置2的传感器局部坐标系到相机世界坐标系的平移矩阵;R2为检测位置3的传感器局部坐标系到传感器全局坐标系的旋转矩阵;T2为检测位置3的传感器局部坐标系到传感器全局坐标系的平移矩阵。
Q1、Q2、Q3、Q′1、Q′2、Q′3处六个点在基准舱段基坐标系下表示为Pb11、Pb12、Pb13、Pb21、Pb22、Pb23。由于基坐标系和传感器全局坐标系只存在平移关系,所以存在以下关系:
3 仿真分析与实验
3.1 仿真分析
由于豁口的识别仅为了计算两舱段轴向角度,故只通过两舱段对接处3个点位的2D轮廓偏差求取两舱段除自转角α外的5个自由度位姿进行仿真验证。以直径700 mm的舱段为例,所选测点位置为:θ1=-90°,θ2=90°。基准舱段的3个特征点坐标见表1。
假定待对接舱段存在以下3组位姿偏差,见表2。考虑到舱段加工引起的误差,每个测点数据引入0.05 mm量级的误差,待对接舱段3个特征点坐标见表3。
采用本文方法的仿真结果见表4。可知仿真识别结果比较理想,在引入0.05 mm误差的条件下,仿真结果位置误差小于0.1 mm,角度误差小于0.01°。
3.2 实验
针对某直径为700 mm的该舱段,采用SickRulerXR150传感器,该传感器的视场宽度为106~146 mm,工作距离为85~145 mm,Z方向
分辨率为4~7 μm,该配置完全满足舱段姿态测量的精度要求。
具体的姿态测量和调整流程如图9所示。将两舱段调整至50 mm待装位,首先使用2D激光位移传感器在三个检测位置处采集两舱段的轮廓信息及底部豁口位置信息,求得当前舱段的相对姿态数据xb、yb、zb、α、β、γ。首先判断α、β、γ是否达到精度要求,如果没有达到精度要求则驱动执行机构调整α、β、γ角度;如果达到要求则再判断yb、zb是否达到精度要求,如果没有达到要求则驱动执行机构调整yb、zb,否则驱动执行机构前进xb完成对接。
待对接舱段法兰端面圆采用2D轮廓传感器对舱段对接端面的三个位置进行检测和处理,处理的结果如图10所示,图10a~图10c所示分别是三个位置的两舱段对接圆的轮廓信息,横轴代表传感器局部坐标系中的Xm方向,纵轴代表传感器局部坐标系中的Zm方向。根据这些轮廓信息用姿态求解算法可求得除自转角外的5个自由度位姿。图10d表示豁口位置的图像处理结果,根据求得的豁口轮廓特征求解舱段的自转角α位姿。
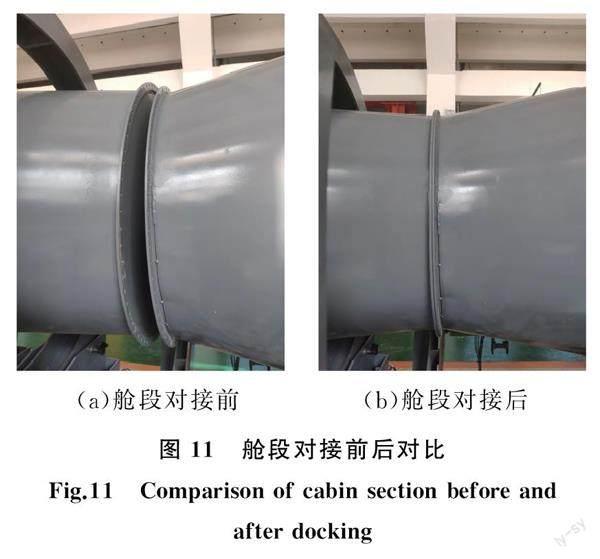
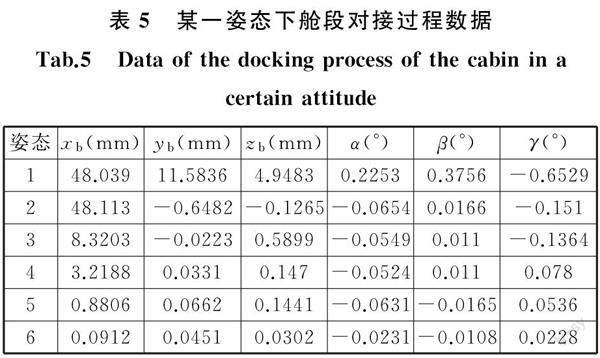
图11a所示是两舱段在某一姿态下对接前的状态,图11b所示是对接完成后的状态。该姿态下两舱段对接过程中的姿态数据见表5,可知检测6个循环即可完成舱段的对接。
经过多次实验验证,在两舱段处于不同位姿状态下,使用该姿态测量方法和姿态调整机构均能顺利完成对接。
4 结论
(1)采用2D激光位移传感器对加工精度符合要求的舱段法兰对接面的3个位置进行检测得到对接处的轮廓偏差信息,计算得到待对接法兰圆上3个点的空间坐标,进而解得待对接舱段相对于基准舱段的除自转角的5个自由度位姿。
(2)采用2D激光位移传感器对两舱段的豁口信息进行扫描,得到待对接舱段相对于基准法兰的自转角偏差。
(3)通过引入0.05 mm量级误差,经过仿真分析得出姿态数据中的位置误差小于0.1 mm,角度误差小于0.01°。结合实验对舱段对接方法的验证,结果表明,所提方法测量精度高,对接效果良好,完全满足舱段自动对接需求,有效提高了自动对接系统的效率、稳定性和一致性。
(4)本文方法是一种脱离靶标、不需要人工参与的非接触测量方式,大大提高了对接的效率,为进一步提高自动对接质量和效率打下了基础,在自动对接领域具有广阔的应用前景。
参考文献:
[1]MORIN P,SAMSON C,POMET J B,et al. Time-varying Feedback Stabilization of the Attitude of a Rigid Spacecraft with Two Controls[J].Systems & Control Letters,2014,25 (5):375-385.
[2]TILLERSON M,INALHAN G,HOW J P.Coordination and Control of Distributed Spacecraft Systems Using Convex Optimization Techniques[J].International Journal of Robust & Nonlinear Control,2016,12:207-242.
[3]ZHANG B, YAO B, KE Y. A Novel Posture Alignment System for Aircraft Wing Assembly[J]. Journal of Zhejiang University—Science A, 2009, 10(11):1624-1630.
[4]DENG Z, LI S, HUANG X. Uncertainties Evaluation of Coordinate Transformation Parameters in the Large-scale Measurement for Aircraft Assembly[J]. Sensor Review, 2018, 38(4):542-550.
[5]陳栋,李世其,王峻峰,等. 一种以测量关键特征拟合舱段位姿的方法[J]. 中国机械工程,2019,30(18):2250-2256.
CHEN Dong, LI Shiqi, WANG Junfeng,et al. A Method for Fitting the Cabin Position and Attitude by Measuring Key Features[J]. China Mechanical Engineering, 2019,30(18):2250-2256.
[6]冯春,吴洪涛,陈柏, 等. 追踪与目标航天器相对位姿参数四元数的解析算法[J]. 中国机械工程,2013,24(12):1655-1660.
FENG Chun, WU Hongtao, CHEN Bai,et al. Analytical Algorithm for Quaternion of Relative Position and Attitude Parameters of Tracking and Target Spacecraft[J]. China Mechanical Engineering, 2013,24(12):1655-1660.
[7]季红侠.飞机大部件对接中的自动测量技术研究与系统开发[D]. 南京:南京航空航天大学,2012.
JI Hongxia. Research and System Development of Automatic Measurement Technology in the Docking of Large Aircraft Components[D]. Nanjing :Nanjing University of Aeronautics and Astronautics, 2012.
[8]梅中义,范玉青. 基于激光跟踪定位的部件对接柔性装配技术[J].北京航空航天大学学报,2009,35(1):65-69.
MEI Zhongyi, FAN Yuqing. Flexible Assembly Technology of Parts Docking Based on Laser Tracking and Positioning[J]. Journal of Beijing University of Aeronautics and Astronautics,2009,35(1):65-69.
[9]宋兴君. 导弹舱段对接中的非接触测量系统设计与分析[D]. 哈尔滨:哈尔滨工业大学,2019.
SONG Xingjun. Design and Analysis of Non-contact Measurement System in Missile Cabin Docking[D]. Harbin:Harbin Institute of Technology, 2019.
[10]金贺荣,刘达. 面向筒类舱段自动装配的两点定位调姿方法[J]. 中国机械工程,2018,29(12):1467-1474.
JIN Herong, LIU Da. Two-point Positioning and Attitude Adjustment Method for Automatic Assembly of Tubular Cabins[J]. China Mechanical Engineering, 2018,29(12):1467-1474.
[11]金贺荣,刘达,于斌, 等. 舱段自动装配位姿求解方法研究[J]. 中国机械工程,2017,28(1):88-92.
JIN Herong, LIU Da, YU Bin, et al. Research on the Solution Method of Automatic Cabin Assembly Pose[J]. China Mechanical Engineering, 2017,28(1):88-92.
[12]徐康力. 相机测量技术在舱段自动对接中的应用研究[D].西安:西安电子科技大学,2020.
XU Kangli. Application of Camera Measurement Technology in Automatic Docking of Cabins[D]. Xian:Xidian University, 2020.
[13]张解语. 面向舱段对接的位姿自动化测量关键技术研究[D]. 西安:西安电子科技大学,2020.
ZHANG Jieyu. Research on Key Technologies of Automatic Pose Measurement for Cabin Docking[D]. Xian:Xidian University, 2020.
[14]陳冠宇,成群林,张解语, 等. 基于多传感器测量的航天器舱段自动对接位姿调整方法[J]. 北京航空航天大学学报,2019,45(6):1232-1239.
CHEN Guanyu, CHENG Qunlin, ZHANG Jieyu,et al. Automatic Docking Position and Attitude Adjustment Method of Spacecraft Cabin Based on Multi-sensor Measurement[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019,45(6):1232-1239.
(编辑 陈 勇)
作者简介:
孙露萍,女,1995年生,硕士。研究方向为机器视觉。
张 倩(通信作者),女,1982年生,正高级工程师、博士。研究方向为机械装备自动化。E-mail:zhangqian82618@163.com。
收稿日期:2022-08-01
基金项目:江苏省重点研发计划(BE2021057)
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
特区文学·诗(2021年6期)2021-12-22
作文小学中年级(2020年6期)2020-07-24
作文·小学低年级(2020年6期)2020-07-14
制造技术与机床(2019年4期)2019-04-04
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
北方文学(2016年4期)2016-04-29
湖北工业大学学报(2016年5期)2016-02-27
电源技术(2015年2期)2015-08-22
