
轮腿式机器人运动学分析及其步态规划
2023-11-28 12:43陈耀轩周子尧王峥宇
起重运输机械 2023年21期
陈耀轩 周子尧 王峥宇 梅 杰,2 陈 昆,2
1 武汉理工大学交通与物流工程学院 武汉 430063 2 武汉理工大学智能制造与控制研究所 武汉 430063
0 引言
目前,智能机器人领域的发展呈现多元化、智能化等趋势,机器人产业得到极大发展,各种可移动机器人陆续被研制出来协助人们的生产和生活,使用移动机器人替代人类在各领域工作的研究也吸引了诸多学者的关注[1]。按照移动机器人结构的不同,可将其分为轮式、腿式、履带式机器人等[2]。面对较为复杂的路面,传统的依靠单一移动模式的机器人逐渐难以满足需求。因此,复合式地面移动机器人成为重点研究热点[3]。目前,轮腿式结构主要有3 种,轮子安装在机器人腿的末端,轮腿步态转换依靠末端轮子的收放;轮子与机器人腿结构分开,轮腿步态转换依靠各机构独自运行[4];轮腿混合机构,该机构具有轮式与腿式机器人的部分特征,轮腿步态不严格区分。这3 种轮腿机器人结构提高了机器人在非结构特种环境下的运动性能。轮腿式机器人兼具轮式机器人的快速性、平稳性以及腿式机器人的高越障性,可以随外界环境调整自己的运动姿态,已经成为移动机器人领域一个充满活力、具有挑战性的前沿发展方向[5]。
本文设计了一种多功能、可实现构型切换、可搭载末端夹取装置的轮腿式机器人,该轮腿机器人拥有4 条肢体,每条肢体都是由关节模块和碳纤维连接板组成的三自由度机械腿,通过仿真和试验分析来验证其稳定性。
1 机器人机械结构设计
1.1 躯体结构设计
轮腿机器人躯体部分主要由碳纤维板和亚克力板构成,在机壳前端头部安装有双目相机,在后端装有躯体轮;躯体内部布置有电池组、上位机和下位机,分别用于控制整机和躯体轮。躯体内部构造如图1 所示。
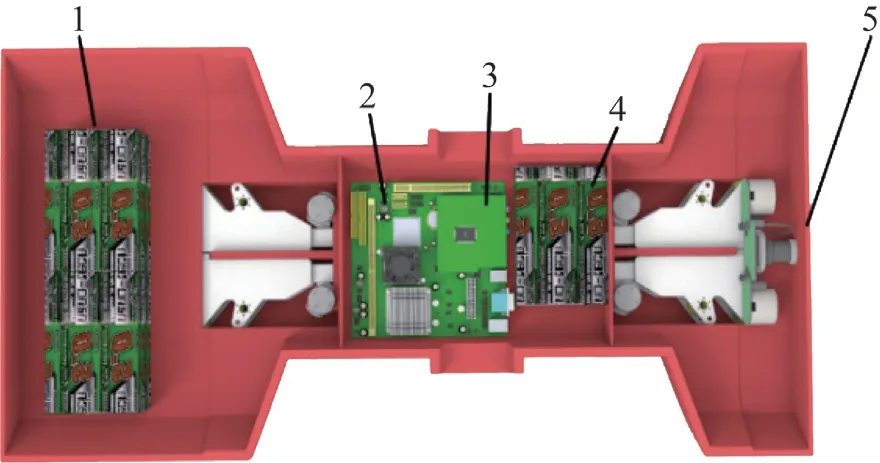
图1 轮腿机器人躯体内部构造
1.2 轮腿结构设计
本项目设计了3 关节腿部机构,由2 个俯仰关节和一个偏摆关节组成。机器人的前腿在此基础上于肢体末端增加了另外2 个自由度用于足末端夹取装置的收放旋转,使该机器人具有充足的灵活性,可实现构型切换和使用末端夹取装置进行作业。前后腿腿部结构如图2。
在行进过程中,关节1 向外偏摆以使腿关节有足够的空间进行变形,关节3 根据下位机的指令输出特定角度的俯仰运动以使轮腿部分抬起,关节2 可配合关节3进行俯仰运动迈开轮腿,并通过角度的调节使腿足维持竖直,关节3 再进行俯仰运动使腿足部分抓住地面,关节1 向内侧收回即可完成一个运动周期。其中,末端夹取装置可安装在前足端上侧,连接稳定的同时也方便随时拆卸。
2 机器人肢体运动性能分析
本项目旨在解决特种场景下机器人的工作问题,项目采用了串联的三连杆轮腿式结构,每条腿存在3 个自由度。但在实际运动过程中,并不需要所有关节都参与,只是涉及到部分关节结构的运作和调整。经分析,对机器人行进过程中四足腿式构形的步态规划可简化为单腿的1 个侧摆运动和2 个俯仰运动,4 腿左右对称分布,情况类似。
因此,可以利用机器人学中D-H 建模法对之进行建模,格局关节布置方式可达相关的D-H 参数,进而建立Matlab 姿态仿真调试模型[6]如图3 所示。

表1 连杆及其参数
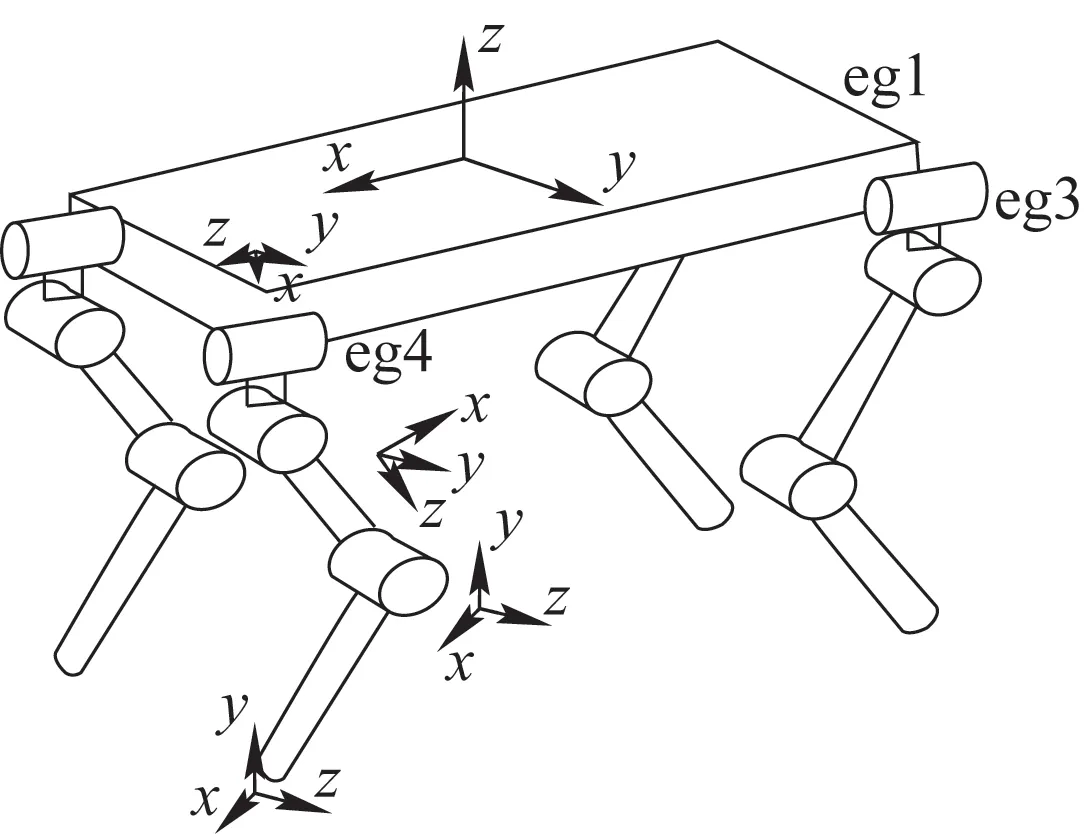
图3 Matlab 姿态仿真调试模型
求得腿式机构中单腿运动学正解(B、T为D-H 参数决定的坐标变换矩阵)
运动学逆解是实现步态规划的基础,根据求得的各关节角作为机器人的位置驱动。运用解析法求机器人运动学逆解,经过一系列矩阵运算和变量代换得到的逆运动学结果为
3 机器人仿真分析
3.1 步态规划分析
四足动物的步态是指各个腿之间具有固定相位关系的行走模式,不同的动物由于自身条件的限制,如腿长、腿的位置、神经控制方式等,其步态也会变得不一样。如双足动物的行走、奔跑,四足动物的行走(以下简称Walk)、对角小跑(以下简称Trot)。本项目以LF(左前腿)、RF(右前腿)、RB(右后腿)、LB(左后腿)分别替代四足动物的4 条腿,然后可以根据其步态的特点得出它们各自的相位关系。步态是实现仿生四足机器人运动性能的基础规划,步态的协调性、连续性与可调整性直接决定着仿生四足机器人运动性能的优劣[7]。
足内关系是步态的一部分,在研究四足动物的足间协调规律后,本文研究了同一条腿之间髋关节与膝关节之间的相位关系。为了简化控制难度,提出了以下必要性假设:
1)膝关节的运动不影响四足机器人的步长,步长只由髋关节决定,并且膝关节运动的主要目的是提高抬腿的足末端高度,使得步态圆滑,机器人抬腿、落地流畅,不会出现搓地、绊脚的问题;
2)躯体内部器件质量分布均匀,机器人中心与几何中心重合,且在运动过程中,腿部动作的摆动对机器人重心位置的影响忽略不计;
3)当机器人正常运动时,支腿足末端与地面的接触面简化为点。
通过观察四足机器人的行走协调,总结出了具有普遍意义的四足机器人组内髋关节与膝关节协调规律:
1)在四足机器人在正常行走过程中,同一条腿的膝关节与髋关节存在着固定的相位函数关系;
2)当步态处于摆动相时,膝关节与髋关节同步运动,髋关节摆动的前阶段,膝关节往身体内曲腿,当运动到摆动中点时,膝关节曲腿角度到最大,运动到摆动后期时,膝关节开始伸腿展开,当运动到摆动终点时间,膝关节恢复原位。
3)当处于支撑相时,髋关节往后摆动推动躯体,而膝关节保持原状态不动。
基于上述髋关节与膝关节的运动规律,引入半波函数(膝关节处腿部摆动相时,按波形运动,支撑相时不运动),可以得知膝关节的控制曲线表示为
式中:Ah、Ak分别为髋关节和膝关节驱动波形的幅值,即使运动周期中的最大转动角度;θk(t)为关节的驱动信号关于时间的函数,可计算得出髋关节与膝关节的波形图;sgn(ψ)为标志函数。
假设sgn(ψ)是一个正弦函数,版波函数膝关节规划函数符合四足机器人的步态规律,且曲线圆滑、可调节性高,可以有效解决绊脚、搓地等问题。
3.1.1 基于中央模式发生器的步态分析
生物的节律步态是生物神经节律控制机理产生的一种自激振荡、相位互锁的运动模式,由生物低级神经中枢的中枢模式发生器(Central Pattern Generator,CPG)产生的节律信号控制。CPG 是节律运动的中心控制器,不仅需要产生节律信号,控制执行器进行运动,还需要根据反馈信号进行识别,及时修改生成新的信号,使四足机器人能够稳定行走。
本文采用Hopf 振荡器来建立四足机器人的CPG 模型。根据足间与足内的拓扑关系可以构建出四足机器人的分层拓扑关系图见图4。

图4 足间与足内的拓扑关系

图5 四足机器人单腿运动图解
单个Hopf 振荡器的数学表达式为
根据上文给定的拓扑关系构建的8 路(髋关节4 路、膝关节4 路)Hopf 振荡器的状态方程,可以利用积分器对该微分方程进行求解,无需利用龙格库塔数值解法或者是牛顿法求解微分方程。
式中:xi为振荡器的输出,用作骸关节角度控制信号,即θhi=xi;右端第二项为振荡器间耦合项;为i和j振荡器之间的相对相位;R()为旋转矩阵,描述了各振荡器之间的相s位耦合关系。
坐标变换阵或是步态权重矩阵利用坐标变换原理,可使不同腿、关节之间的信号相位可以按照步态矩阵θij(i=j=4,表示腿间相位关系)给定的相位关系生成。
综上可知,四足机器人鹘关节摆动幅Ah可统一表示为
此膝关节的摆动幅值Ak为
Hopf 步态参数如表2 所示。
当四足机器人采用Walk 步态,且β=0.75,φRH=0.25,行走速度为0.3 m/s,步态周期为0.8 s,足端最大离地高度为0.02 m 时,计算求得机器人鹘关节摆动幅值为11.99°,膝关节摆动幅值为8.18°;当四足机器人采用Trot 步态,且β=0.5,φRH=0,行走速度为0.6 m/s,步态周期为0.4 s,足端最大离地高度为0.02 m 时,计算求得机器人鹘关节摆动幅值为7.96°,膝关节摆动幅值为8.18°。
在上述仿真参数设置下,利用 Matlab/Simulink 对所建立的CPG 控制系统进行数值仿真。当轮腿机器人采用Walk 步态时的关节控制曲线如图6 所示,图中LF、RF、RH、LH 分别为机器人的左前腿、右前腿、右后腿和左后腿。从图6 可以看出,CPG 控制模型所输出的控制曲线很快都能达到稳定振荡,鹘关节控制曲线严格符合Walk 态的相位关系,各腿之间的相位差为1/4 周期,膝关节控制曲线满足同腿膝鹘关节的运动关系,且反映前肘后膝式的关节配置形式。
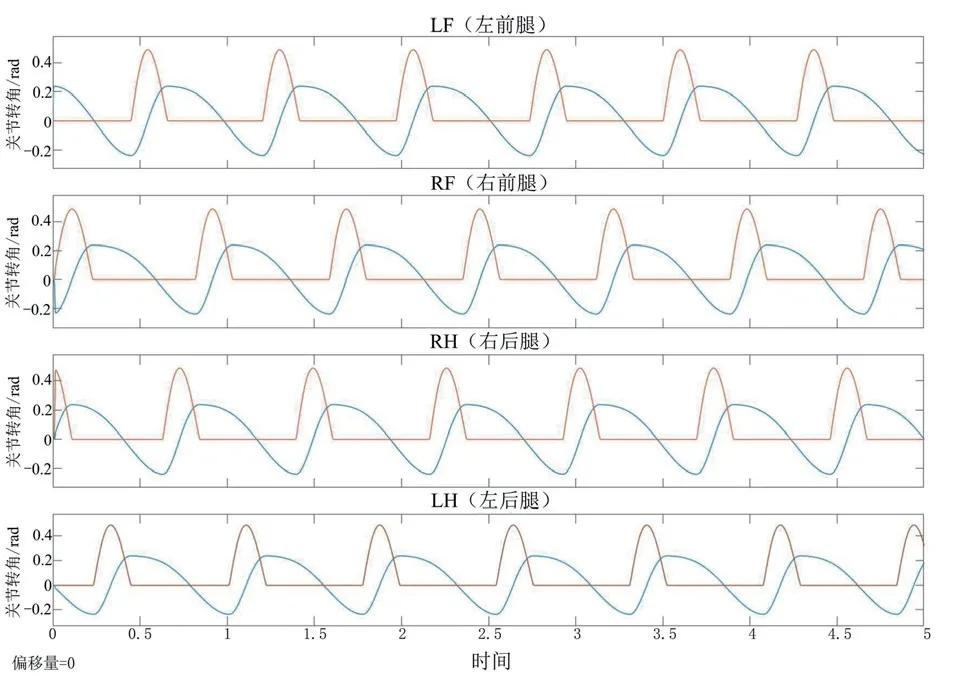
图6 Walk 步态关节控制曲线
当轮腿机器人采用Trot 步态时的关节控制曲线如图7 所示,骸关节控制曲线严格符合Trot 步态的相位关系,LF、RH 腿同相,RF、LH 腿同相。
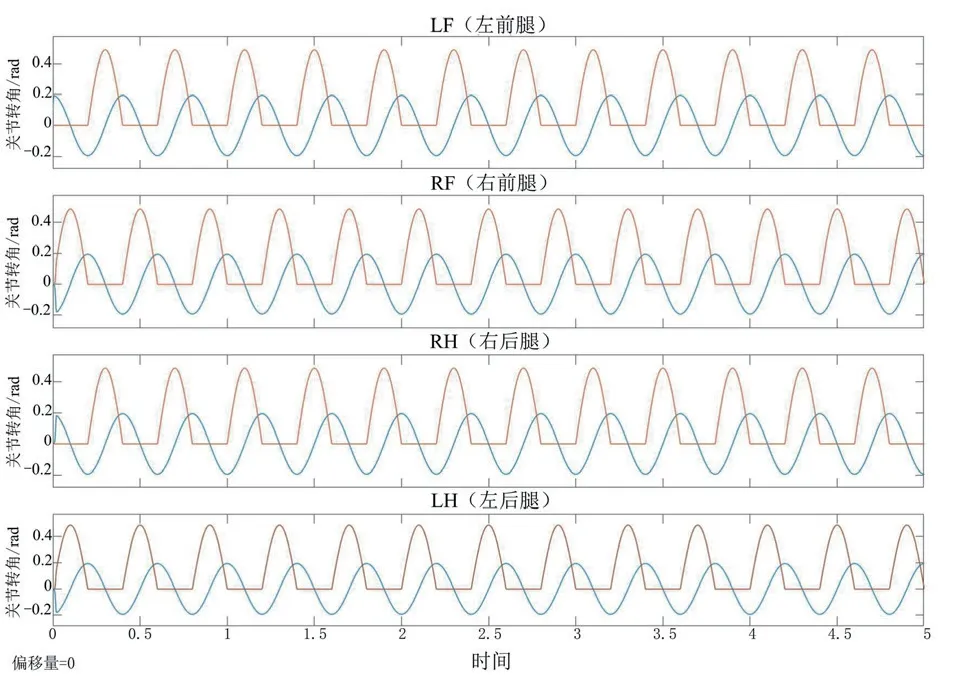
图7 Trot 步态关节控制曲线
3.2 基于Simulink 的机器人控制信号输出仿真
由于利用Simulink 的基本模块运算速度慢,移植性差,不能有效地进行开发步态与ADAMS 联合仿真,本项目组利用Simulink 的m-Function 模块对上述模型进行改进,将模型中的大多数运算都替换成移植性与兼容性更高的Fcn 模块(见图8),实验表明,更换后能显著提高运行速度与控制的实时性。所以本项目组利用Fcn 代替Simulink 复杂模块。

图8 Fcn 模块
3.3 机器人可操作性分析
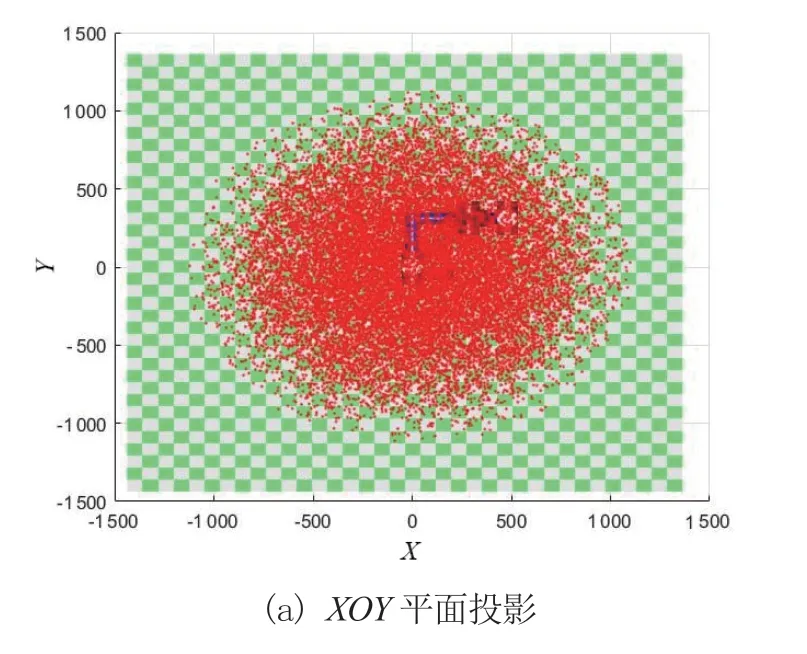
机器人肢体的工作空间指在各关节转角范围内,肢体末端夹取装置或足端可以到达的位置点的集合,反映了肢体的灵活性和可操作性。本文采用基于蒙特卡罗法的数值方法求解肢体工作空间,取大量的采样点进行计算,通过正运动学求解,得到相应的末端位置,绘制大量末端位置点即可可视化机器人肢体的工作空间,其算法流程如图9 所示。

图9 肢体工作空间算法流程图
借助Matlab 软件的计算和绘图功能,取20 000 个随机点,绘制肢体的工作空间如图10 所示,可以得到X、Y、Z在空间坐标范围分别为(-1 122.03,1 099.26)、(-1 111.86,1 122.87)、(-1 119.55,989.14)。肢体工作空间在不同平面内的投影和在三维空间中的集合可以为后续足式构型机器人步态的规划以及足端轨迹曲线空间约束的确定提供参考。
4 结论
1)通过分析现有轮腿式和多模式机器人结构特点,提出了单肢具有三自由度的可重构轮腿式机器人的基本构型,并对机器人躯干布局、肢体构型、关节模块以及足端抓取装置进行了设计。
2)为适应不同的工况,提出了轮式移动构型、轮式操作构型和足式移动构型3 种工作构型,并对不同构型的特点进行了分析,对构型间的切换进行了规划。对轮式构型机器人的2 种构型的特点和适用场景进行了分析;
3)对足式构型机器人的Walk 步态、Trot 步态、Pace 步态和Gallop 步态进行了仿真分析,并利用Matlab/Simulink 对所建立的 CPG 控制系统进行数值仿真,做出各种步态的关节运动曲线。
猜你喜欢
保健医苑(2023年2期)2023-03-15
临床骨科杂志(2022年5期)2022-11-05
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08
冰雪运动(2020年4期)2021-01-14
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
中华骨与关节外科杂志(2017年1期)2017-05-17
北京航空航天大学学报(2017年10期)2017-04-20
发明与创新(2015年37期)2015-02-27
发明与创新(2015年33期)2015-02-27
