基于RBF神经网络的三轴云台自适应滑模控制
2023-11-24 11:22:56易成群吴佳晔李嘉莉
四川轻化工大学学报(自然科学版) 2023年5期
易成群,吴佳晔,李嘉莉
(1.四川轻化工大学自动化与信息工程学院,四川 宜宾 644000;2.人工智能四川省重点实验室,四川 宜宾 644000)
引 言
近些年来,随着影视行业对云台设备需求量的增多,越来越多的厂商对以往昂贵的云台和辅助摄影设备进行“普适化”处理,三轴云台就是其中典型。三轴云台不仅控制系统极其复杂,而且精度要求特别高,因此在实际运用的过程中,其所采用的控制方法对于云台性能至关重要[1]。在三轴云台的跟踪控制中,常见的控制方法有传统PID 控制[2]、自适应控制[3]、滑模变结构控制[4]、鲁棒控制[5]等。
云台在工作过程中,往往存在许多不稳定的因素,这些对云台系统性能的影响也是不可忽视的[6]。在国内,从上世纪末开始,已有研究人员尝试将神经网络和滑模控制相结合起来,用以解决非线性控制问题[7]。近几年来,已经取得了较大的科研进展。王建彬[8]提出基于NDAP的轨迹跟踪控制算法,解决了传统的控制方法用于设计全向机器人方面所体现灵活性不高和机动性不强的问题。刘欣[9]对手持三轴云台进行具体建模分析,设计出了完整的基于神经网络滑模控制理论模型,经仿真验证其控制效果良好,实现了对滑模控制中抖振现象良好的抑制作用。文献[10]研究出一种基于神经网络滑模控制的上肢康复外骨骼机器人,此机器人可以有效帮助患者做康复训练,成功实现了将滑模控制算法应用到实际中,并对未来滑模控制的研究方向做出了展望。杨超等[11]提出了一种基于神经网络的主动控制方法,解决了作业型水下机器人的轨迹跟踪问题,通过仿真实验验证表明,水下机器人能够平稳沿着预设轨迹进行作业。文献[12]成功建立自主研制的三维EVC 装置的动力学模型,此模型是建立在RBF神经网络控制下,解决了对此类设计模型成品化问题。夏长高等[13]将自适应结合RBF神经网络的滑模控制方案,成功应用于存在非线性和参数时变问题的汽车前轮转向控制的场景。王经纬等[14]结合RBF神经网络的滑模控制方法,成功解决了炮控系统在电动负载模拟器控制下存在多余力矩的问题。付涛等[15]采用粒子群优化算法对网络结构的时变参数进行优化,实现了对滑模控制中抖振问题的有效抑制。
基于以上文献讨论分析,滑模控制方法在轨迹跟踪控制中有着很好的效果,但是针对日常运转中出现的外在扰动因素影响问题,轨迹跟踪控制目前没有考虑到其对跟踪稳定性和精度的影响。基于此,本文根据三轴云台的结构特点,采用基于径向基函数神经网络(RBFNN)逼近未知的三轴云台动力学模型,引入滑模辅助控制系统消除内外扰动的影响,并通过Lyapunov 稳定性分析证明所提出控制器的有效性。
1 问题描述及动力学模型
云台系统控制的整体控制框图如图1所示。
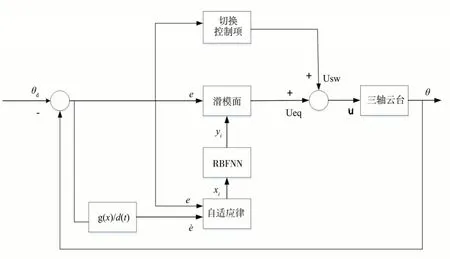
图1 三轴云台自适应控制框图
电机选取的是伺服电机,此类电机的电气时间常数相较于机械时间常数来说,微乎其微,所以这里忽略电流环状态,进而有:
其中,L为伺服电机的总电感;R为整体回路等效后的电阻;s是Laplace算子。
电机输出转矩定义为:
其中,Ce为电机反电动势系数;Km为电机电磁转矩系数(N·m·A-1),且Km>0;θ(t)为电机转轴的角速度;Ku是放大器环节增益。因此某云台伺服系统动力学方程定义为:
其中,J为等效转动惯量(kg·m2);Ff(t)为云台转轴间的摩擦干扰因素,Tf(t)为外部干扰云台系统的不确定性因素。
联立式(2)、式(3),可以得到最终系统动力学方程为:
其中,u(t)为云台系统的输入量,然后将上式中所出现的不确定干扰项进行简单优化处理,视为内部扰动并令其为g(t);将视为外部扰动并令其为d(t),且满足|g(t)|+|d(t)|≤D,D为干扰上界;视为建模时已经确知的部分,并令其为b。
参照文献[16]中对于三轴云台的控制精度设计要求,对此次三轴云台控制算法中的控制有以下两个方面要求:
1)为了使得三轴云台在运转的过程中能够保持良好的稳定性能,务必使得滑模控制产生的抖振在较小的范围内。
2)在轨迹追踪上,务必使得控制精度约束在±0.1 rad之内,只有这样才能使得云台系统保持平稳的作业状态。
2 控制器设计
定义该三轴云台伺服系统的输出位移误差为:
其中,θ'd为参考输出,θ为三轴云台伺服系统实际输出。因此定义滑模面函数s为:
且规定:c为大于0的常数,c的取值决定误差的收敛速度,b为非0常数。联立式(5)和式(6),可得:
综上所述,将滑模控制率设计为:
其中,σ为大于0 的常数,ηsgn(s)为用于克服对云台伺服系统产生干扰的鲁棒项。符号函数sgn(s),形式为:
采用一种新式饱和函数来代替上述的符号函数,新式饱和函数相比较于符号函数能更好地消除滑模抖振对系统带来的影响,也使得控制量切换时更加具有连续性。新式饱和函数sat(s)[17]为:
其中,Δ 为大于0 的常数。所以结合式(7)、式(8)和式(10),系统控制器输出为:
选用RBF 神经网络对于三轴云台运转过程中的实时干扰进行预测,进而通过实时调整后续控制参数,以此来减少外界干扰对云台性能的影响。RBF 神经网络是一种具有单隐层的三层前向网络,其结构简单而且训练速度快[18],RBF 神经网络结构如图2所示。
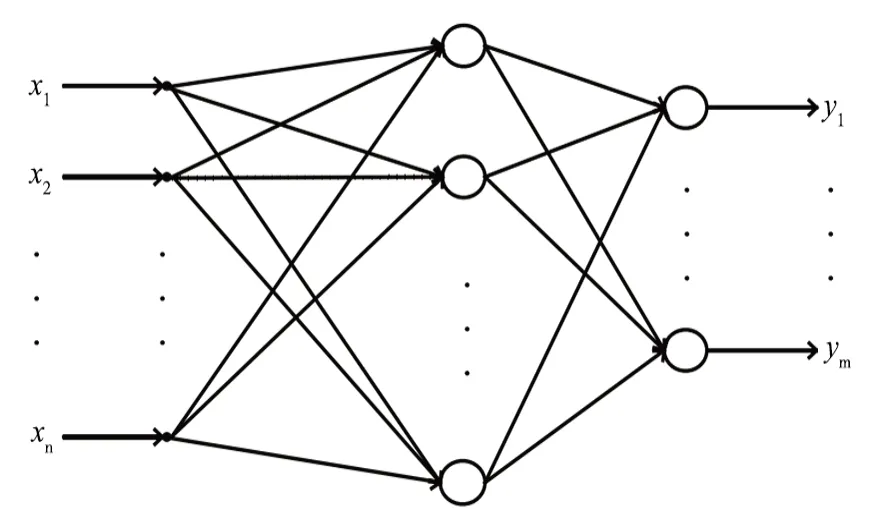
图2 RBF神经网络结构图
设计的RBF网络输入输出算法如式(12)所示:
选用高斯函数作为激活函数,式(12)和图2中:xi代表网络输入,yi代表网络输出,cj为中心向量,bj为大于0 的基宽参数,h=[hj]T代表高斯基函数输出,ε为神经网络的逼近误差。
定义Lyapunov函数[19]为:
其中,系数λ>0,对式(15)进行求导,结合式(14)、式(15)可得:
神经网络的权值调整自适应率可以取为:
将其代入式(16)得:
通过上述操作,可以获取到RBF 神经网络所要学习的信息,从而可进一步得到改进后的滑模控制率。
3 仿真验证
3.1 仿真设置
本文以市场上常见的三轴云台为例进行研究。给定的云台参数见表1。

表1 三轴云台参数
参照文献[9],本次神经网络参数的设计中,将网络权值W*的初始值设为0,bj= 5,cj选取3×5矩阵。
给定指令信号为单位阶跃信号:θd(t) = 1(t)。并设置Tf(t)的范围:0~15 N·m。
参照文献[20],参数选取:kp= 20 000,ki= 5,kd= 10,作为参照对比用的 PID 控制输出ui1设计为:
对于本次设计,不仅需要设计传统PID 做对比,也需跟普通滑模控制做对比。参照文献[9],本次普通滑模SMC控制输出ui2设计为:
切换控制项usw=J0(k2s+k3sgn(s) )。
参数选取:k1= 500,k2= 400,k3= 400;其中b为云台伺服系统在外界条件影响下的等效干扰(N·m),取b= sin 2πt。
3.2 仿真结果
本次仿真的结果如图3~图6 所示,其中图3 所示为3 种控制方法的位置跟踪性能曲线;图4 所示为3 种控制方法的速度跟踪性能曲线;图5 所示为改进前的滑模控制器在扰动下的轨迹跟踪性能;图6所示为改进后的具体扰动性能分析曲线。
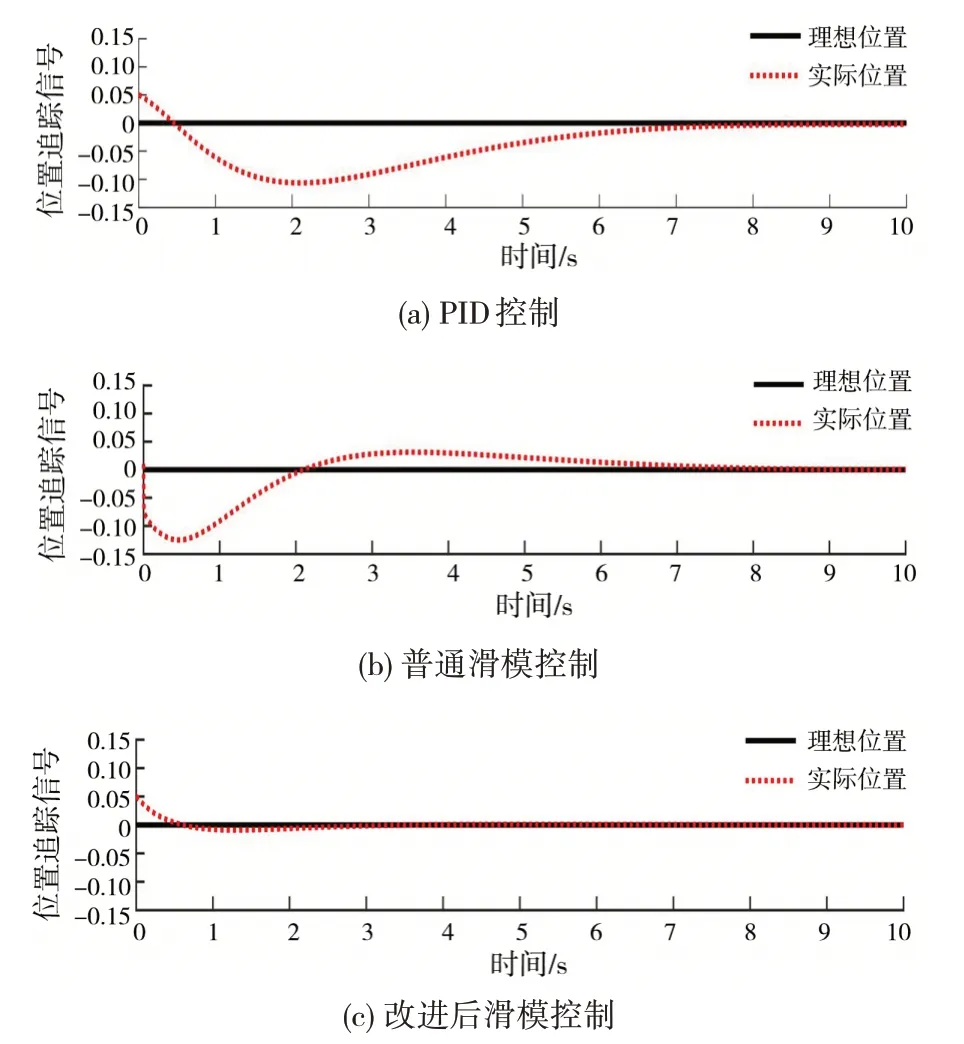
图3 3种控制方法的位置跟踪性能曲线
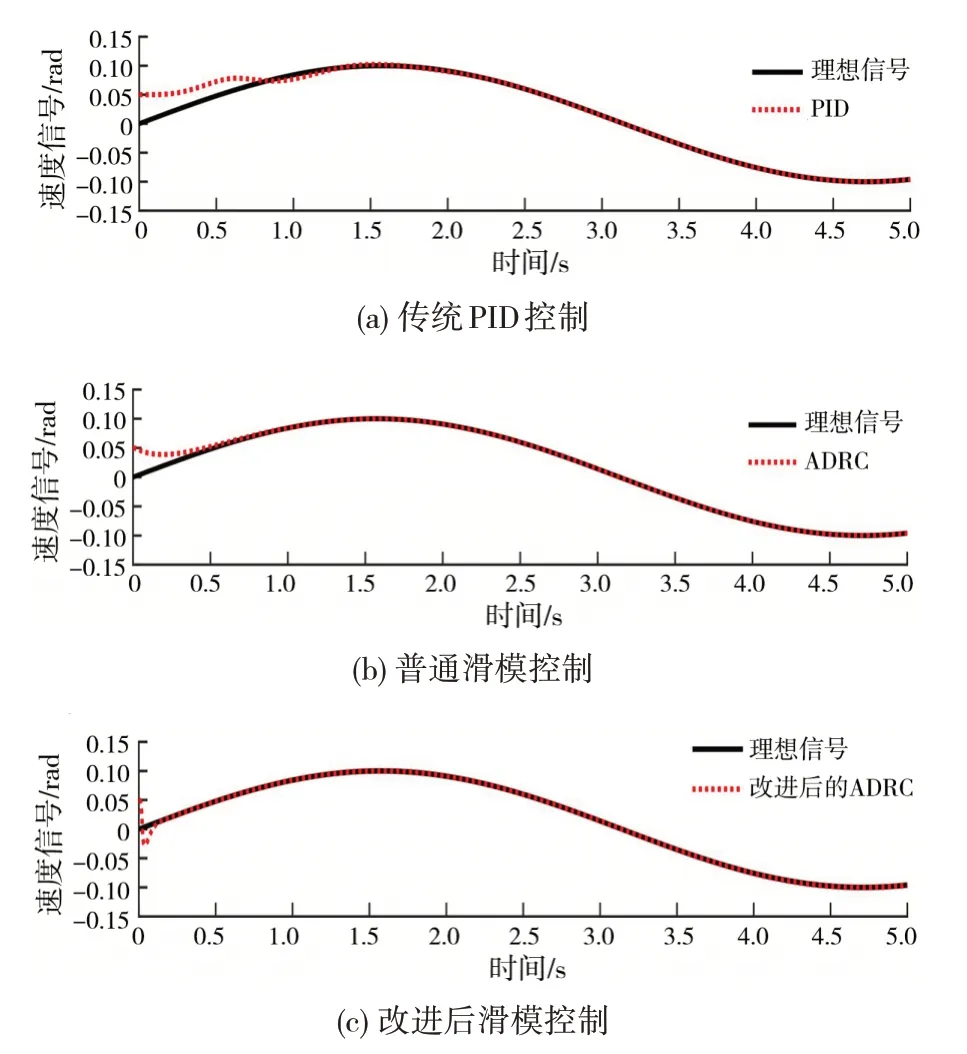
图4 3种控制方法的速度跟踪性能曲线
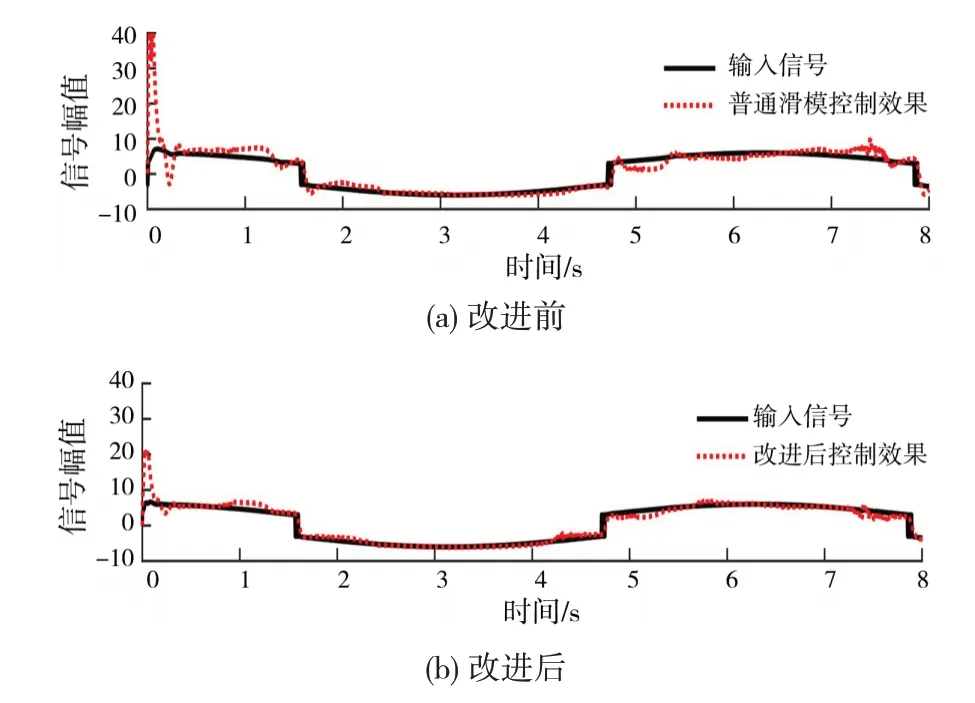
图5 改进前、后的滑模控制器在扰动下的轨迹跟踪性能
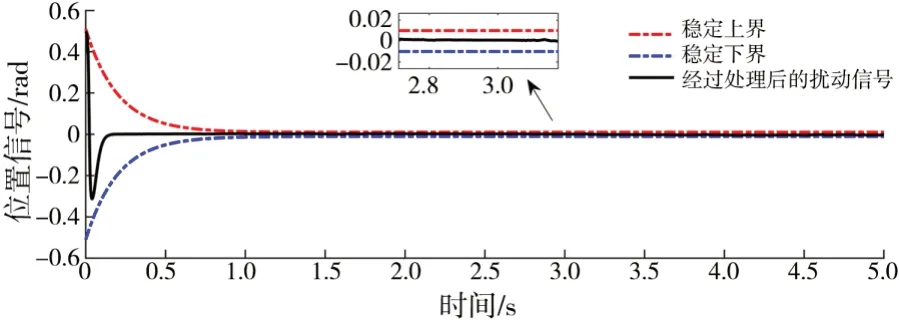
图6 改进后的滑模控制抗扰动性能
滑模控制的控制量在到达预先设好的滑模面上后,对于后续的扰动信号也不会像起初那么敏感,后续运动轨迹也会按照预先设定好的轨迹前行。从图3中可以看出,在控制效果上,普通滑模控制虽然在跟踪效果上要优于传统的PID 控制,但是其所需要时间仍然很长。相比较上述两种控制方法,改进后滑模控制的位置跟踪效果要远远优于上述两种。
从图4中可以看出,在初始时跟踪波动较大,在1.5 s 左右时,传统PID 控制速度跟踪误差逐渐趋于0;在0.5 s 时普通滑模控制的速度跟踪误差逐渐趋于0。而加入RBF神经网络的滑模控制,在0.1 s内,误差已经趋于0。证实了改进后的滑模控制在其速度跟踪性能上要远远优于其他两种控制方法。
从上面的图形分析可知,改进后的滑模控制器和普通的滑模控制相对于传统的PID 控制,在跟踪能力上具有很大优势。接下来,只需对普通滑模控制和改良后的滑模控制进行比较分析。由于日常运转过程中易受到非线性干扰和参数时变等不确定因素的影响,所以考虑引入一段模拟的扰动信号,让其模拟现实中的实际扰动场景,进而用改进前后的滑模控制对其进行轨迹跟踪对比分析。
从图5 可看出,改进后的滑模控制效果要比改进之前更快地贴合输入信号,证实了改进后的控制效果更好。虽然普通滑模控制器也能大致跟踪输入信号,但是改进后的滑模控制器在后续的跟踪中并没出现大的信号波动。
图6所示为经过改进后控制算法处理后的扰动信号效果图,扰动信号被固定在稳定上下界中抖动。其中稳定上下界是指不会对云台的整体性能产生影响的扰动信号范围。图中可见,RBFNN 有助于三轴云台更好地跟踪目标,即使有一些未知的干扰,也可以近似地纠正误差,稳定地控制云台进行信号跟踪。开始阶段,对于扰动的处理效果较差,这是由神经网络各参数初值的选取造成的,在随后的抗干扰过程中此影响逐渐减小,使得RBFNN 函数在扰动下的逼近效果已达到可接受稳定范围内,更加逼近轨迹。
4 结束语
本文对基于RBF 神经网络的三轴云台轨迹跟踪控制进行了研究,通过自适应神经网络对三轴云台的未知动力学模型进行逼近。在未知外部扰动的影响下,无法准确描述云台运动。利用RBFNN,能近似理解并纠正误差,稳定控制云台,确保精准运动。利用Matlab 进行仿真,通过曲线对运动轨迹跟踪控制进行验证。实验结果表明,所提出的控制方法可以对三轴云台系统轨迹进行精确地跟踪控制。
猜你喜欢
现代装饰(2022年6期)2022-12-17 01:10:30
现代装饰(2022年6期)2022-12-17 01:09:42
数学物理学报(2022年4期)2022-08-22 04:06:36
摄影之友(影像视觉)(2020年2期)2021-01-14 05:34:28
数学物理学报(2019年4期)2019-10-10 02:38:56
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
电子制作(2019年23期)2019-02-23 13:21:16
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
贵州师范学院学报(2016年3期)2016-12-01 03:53:52