
基于双层协同架构的高速公路车辆合流决策与规划方法
2023-11-22 13:13:02姜圣丁闪闪彭峰
大连交通大学学报 2023年5期
姜圣,丁闪闪,彭峰
(1.中国信息通信研究院,江苏 南京 210024;2.华设设计集团股份有限公司,江苏 南京 210014; 3. 武汉理工大学 交通与物流工程学院,湖北 武汉 430070)
合流区是高速公路的瓶颈,也是交通拥堵的高发地区[1]。在智能网联环境下,可以对高速合流区主线和匝道的车辆进行协同决策,首先对合流区车辆进行通行次序决策,然后进行协同控制。
车辆通行次序的决策算法分为基于优化和基于启发两种。Sun等[2]提出一种混合交通流下的匝道合流协同决策算法。Pei等[3]利用动态规划进行合流区车辆通行次序决策。先进先出策略(First-In-First-Out,FIFO)是典型的基于启发的次序决策算法,车辆的通行次序取决于到达合流区的时间。通行次序确定后,需要对合流区车辆进行协同控制。目前研究集中在合流区车辆协同控制的分布式解决方案上。Xu等[4]基于简单的决策规则得到通行次序,将合流区车辆的协同控制问题转化为优化问题。蒋明智等[5]基于深度强化学习提出了一种渐进式价值期望估计的多智能体协同控制算法。Karimi等[6]提出了面向混合合流场景的分层控制框架。
综上所述,尽管国内外学者针对高速公路合流问题开展了不少研究,但仍存在以下问题:当车辆数增加,基于优化的车辆通行次序决策算法计算耗时会急剧增加;基于启发的决策算法很多情况下无法得到最优解或足够好的次优解。
基于此,本文提出高速公路合流决策与规划的双层框架,从而实现车辆平稳安全合流的总体目标。首先,对合流区车辆通行次序决策;其次,进行合流区车辆协同控制;最后,开展安全与效率评估,检验研究协同控制算法的有效性。通过仿真,基于高速公路合流区真实交通流数据,分别从个体车辆行车风险层面及交通流安全和效率层面对人工驾驶和协同控制两种工况进行对比评估,得到协同控制显著提升合流安全性与提高交通流效率的结论。
1 车辆通行次序决策
本文提出了一个双层协同架构的合流决策与规划方法。其中,上层采取基于分组的协作式策略用于决策,下层利用考虑车车通信延迟的多智能体一致性理论。
1.1 通行次序决策
车辆通行次序决策用于规划车辆通行序列,以便合流前对合流区车辆进行协同控制,从而保证合流安全以及降低能源消耗。合流区车辆通行次序决策基于车辆进入匝道控制区的初始状态,在保障合流区车辆安全的前提下,以总通行时间最短为决策目标,得到主线和匝道两线车辆的最优通行次序。车辆通行次序决策可以分为两个部分。
(1)车辆抵达合流点最短时间
基于车辆自身传感器、车车通信、车路协同技术,结合相关计算公式得到通行次序决策所需基本参数符号及其含义,见表1。
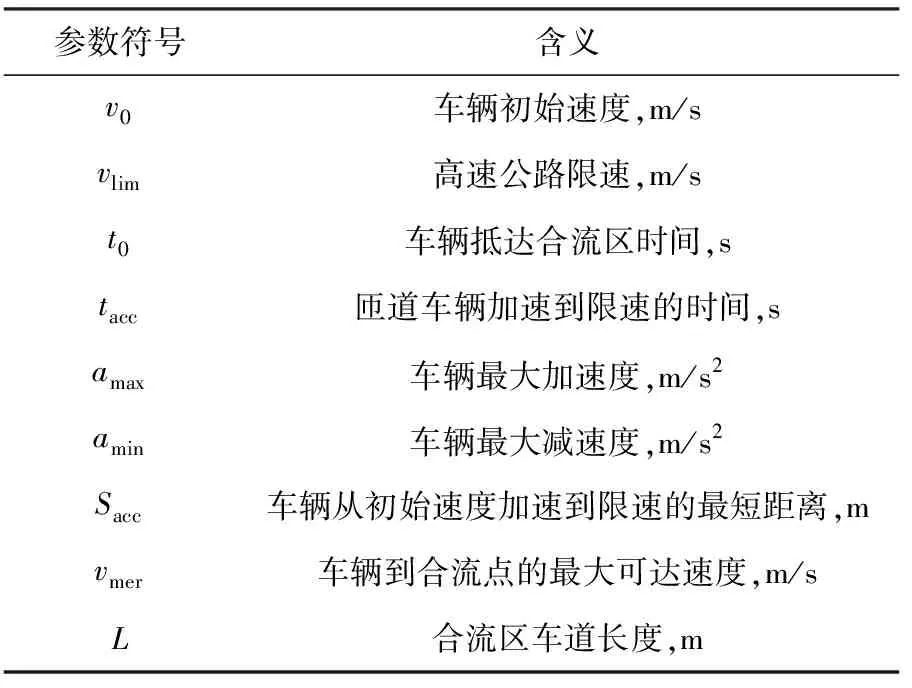
表1 通行次序决策所需基本参数符号及其含义
匝道车辆速度通常比主线车辆速度低,当匝道车道汇入主线车道前需要加速。基于公路限速,可以得到匝道车辆加速到限速的最短时间,即:
tacc=(vlim-v0)/amax
(1)
从而可以得到从初始状态到加速到限速的距离:
Sacc=(vlim2-v02)/2amax
(2)
由于合流控制区车道长度限制,车辆行驶到合流点会有两种情况。当车辆行驶到合流点时,速度小于高速公路限速,无法加速到高速公路限速。或者车辆在抵达合流点前,就已经加速到高速公路限速。
当加速起始点到合流点距离比加速距离短时,匝道车辆无法加速到主线限速速度,从而匝道车辆到合流点的时间为:
(3)
当加速起始点到合流点距离比加速距离长时,匝道车辆先加速到限速速度,然后匀速到达合流点,抵达合流点的时间为:
(4)
主线车辆抵达合流点的最短时间计算方法与匝道车辆类似,车辆从合流区起点到合流点的最短时间为:
(5)
(2)车辆通行序列分配
合流区车辆通行次序决策需要在保证车辆安全的前提下,实现总通行时间以及通行延误最短,即定义成本函数:
(6)
式中:tseq(i)为通行次序i中合流区车辆最后抵达合流点的时间;tseq(i),j为在通行次序i中第j辆车被分配的通行时间;tmin,j为第j辆车抵达合流点所需最短的时间;w1和w2为权重系数,该权重系数的取值根据不同的场景进行人工调整,以获取最好的优化效果。成本函数中两项分别是某一通行次序下合流区车辆总通行时间和该通行次序的情况下的总延误时间。
为避免碰撞,需要保证相邻车辆的适当车头间距,即:
tseq,i-tseq,i+1≥Δt
(7)
因此建立合流区车辆通行次序决策的目标函数和约束如下:
(8)
考虑到车辆动力学特性需要对加速度进行约束,设置最高加速度和最低加速度。当车辆速度过低时,会影响到合流区的通行效率,因此需要对车辆速度进行约束。
基于分组规则,匝道合流区车辆被分为若干组,同一组车辆作为一个车辆队列,被分配一个通行次序。基于分组规则,合流区7辆车辆被分为4组,见图1。基于物理约束,可以构建通行次序可行解的状态空间。

图1 合流区车辆组队协同通行
合流区7辆车辆组队后具有6个通行次序可行解。基于通行次序,可计算在该通行次序下每辆车到达合流点的时间。结合车辆抵达合流点最短时间,可以计算出每一种通行次序的成本函数Jseq,从而可以得出最优通行次序G*。
1.2 分组策略最优性分析
为验证基于分组策略的合流通行优化方法是否具备先进性,现就基于分组策略的合流通行优化方法和单车通行策略方法这两种通行次序决策形式进行比较。
以图2为例,合流区有3辆自动驾驶车辆。车辆1和2之间的车头时距小于阈值,基于组队规则,这两辆车被分为一组,从而合流区车辆被分为2组。基于组队通行策略的通行次序有2种,即123和312。当车辆以个体形式通行,有3种通行次序,即123、312、132。通行次序132是基于分组的通行策略无法得出的通行次序。现计算最优通行次序为132的概率。

图2 车辆组队通行场景
通行次序为132时,基于通行时间规划算法,可得到各车抵达合流点时间,从而得到通行时间:
(9)
若此场景下,最优通行次序为123,则t132≤t123,t132≤t312。现分别讨论通行次序为123以及通行次序为312这两种情况。基于通行时间规划算法,可得到通行次序为123时车辆总通行时间为:
(10)
根据式(9)和式(10),当且仅当t132=tmin,1+2Δt时,t132≤t123。为保证通行次序为213时车辆总通行时间比通行次序为123时大,该场景中3辆车的通行时间需要满足式(11):
tmin,1+Δt≥tmin,3tmin,1+Δt≥tmin,3
(11)
同理可得通行次序为312时车辆总通行时间为:
(12)
显然t132≤t312恒成立。因此为保证通行次序132为最优解,3辆车的通行时间需满足式(11),等价于:
hij≤Δt/2
(13)
由于车头时距服从偏移正态分布,则:
(14)
(15)
(16)
由式(16)可见,在该场景中,基于组队策略得到的最优通行策略比基于个体车辆通行得到的最优通行策略差的概率趋近于0。
1.3 组队最优性证明
为进一步验证基于组队的通行次序决策算法的有效性,将其与基于枚举法和基于FIFO策略的通行次序决策算法进行对比。
假定车辆从主线车道和匝道进入合流控制区的到达率服从泊松分布[7],对于每个车辆到达率,进行20 min的车辆到达模拟。分别记录下每个场景中最优通行次序的通行时间成本J以及求解时间t。


图3 合流区20辆车辆通行次序决策
2 多智能体一致性运动规划
从控制的角度来看,车辆队列控制的目的是在存在扰动、噪声以及通信延迟的情况下,保证队列车辆的相对位置以及速度都趋近于期望值:
(17)
式中:ddes为规划目标车间距。
本节采取分布式一致性控制算法,得到队列车辆的控制输入,使得车辆位置和速度达到期望值,从而实现车辆队列系统的一致性目标,保证合流区车辆平稳安全合流。
为实现合流区车辆队列的一致性控制目标,将车辆队列系统当作多智能体系统,从而将车辆队列系统的控制问题转化为多智能体动态系统的一致性问题。
设公路合流区有N辆车辆,基于车辆相对距离,可以将这N辆车辆视为一个N辆车的队列(图4)。在前车领航车跟随(PFL)通信拓扑结构下,结合V2V通信技术,车辆可以接收来自前车以及头车的运动状态信息,包括绝对位置、速度和加速度。
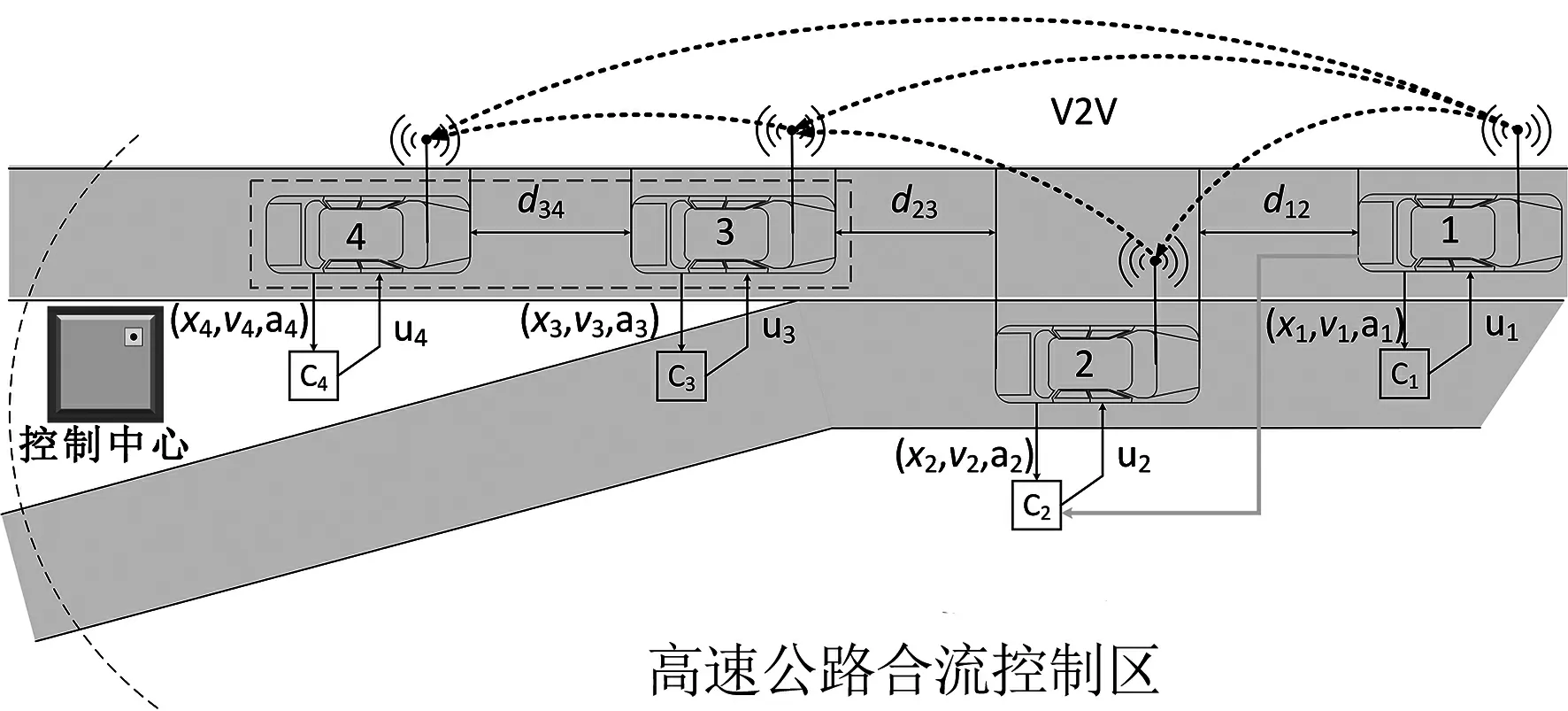
图4 基于分布式一致性控制合流区车辆协同控制
节点动力学模型采用三阶线性模型用于表征车辆纵向动力学[8]。车辆纵向动力学模型为:
(18)
式中:xi(t)、vi(t)、ai(t)分别为队列车辆i在t时刻的位置、速度和加速度,i=0,1,…,N,其中i=0表示为头车;ui(t)表示车辆i在t时刻的控制输入;Ti表示传动系的时间常数(Ti>0)。
在车辆组队协同合流控制系统中,头车即为决策得到的最优通行次序中第一个通过合流点的车辆。通常,头车以期望速度匀速行驶。不失一般性,当头车的初始速度不等于期望速度时,可以加入一个初始速度为期望速度,初始位置为头车位置的虚拟头车。为保障车辆平稳安全合流,需要保证车辆队列实现一致性目标,即:
(19)
然而,队列车辆间的信息交互存在通信延迟。基于通信延迟的时变随机特性,设计考虑队列车辆信息交互延迟的分布式一致性控制协议具有现实意义[9]。因此,本文提出了考虑通信延迟的分布式一致性控制协议,可以得到队列车辆的控制输入,从而实现车辆队列一致性目标,控制协议为:
(20)

3 仿真验证
3.1 仿真案例
仿真采用的部分真实交通数据,来源于数据集Mirror-Traffic。该数据集是利用路侧视频以及无人机等方式采集典型交通场景中车辆的行驶轨迹集。采集到的视频数据经过处理矫正后得到各个场景的车辆运动状态数据集
目前,该数据集包含高速公路匝道汇入、汇出、城市快速路汇入场景中的车辆轨迹数据。由于城市快速路入口匝道为双车道,因此采用单匝道的高速公路入口匝道的合流区交通数据。该数据集包含的匝道合流区数据采集于2020年3月31日8:30,天气为阴天。高速公路为双向四车道,东西走向,入口匝道位于右侧,该路段限速80 km/h。
为验证组队合流策略和协同控制算法的有效性,需要从数据集中提取典型合流场景中的车辆行驶状态进行仿真验证。该数据集共有760辆车的行驶轨迹,合流次数达62次。对数据集中的车辆轨迹数据进行处理并筛选出典型合流场景。合流区中9辆车的车辆行驶轨迹,见图5。将t=492 s时的合流区车辆的状态作为仿真验证的车辆初始状态。9辆车辆的真实状态信息作为组队协同控制算法验证的参考。
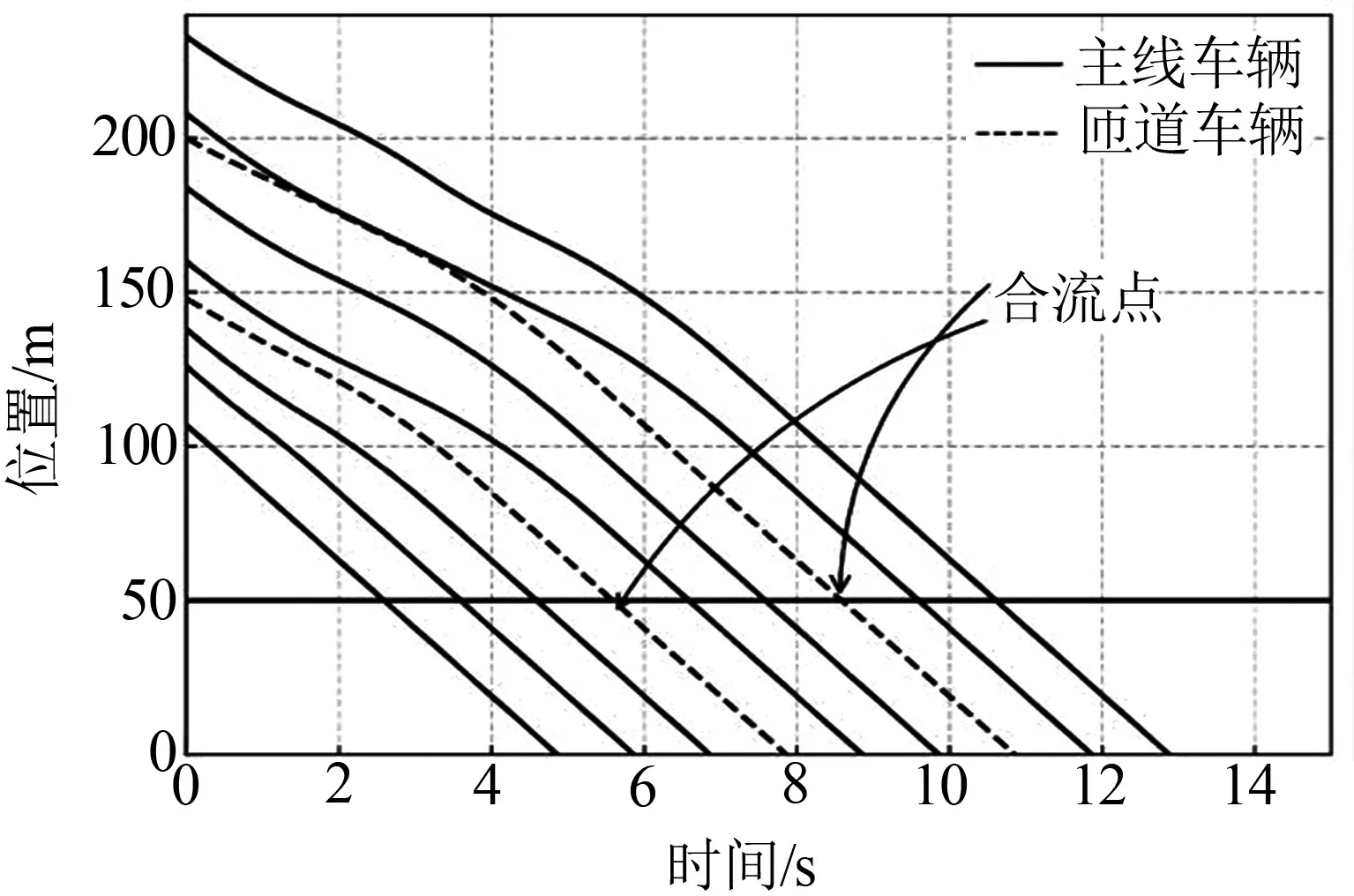
图5 合流区车辆行驶轨迹
合流区车辆初始位置见图6,图中编号1~9的合流区车辆初始位置分别设置为107、126、138、148、160、184、200、208、233;车辆初始速度分别设置22 、22 、21 、15 、20 、19 、14 、20 、18 m/s。

图6 合流区车辆初始位置
基于数据集中匝道车辆的真实合流位置,将采用组队协同控制算法的协同合流的合流点定为50 m。
为验证组队协同控制算法,本文提取了高速公路合流区典型的合流场景中的车辆轨迹,并将合流区车辆的初始状态作为组队协同控制算法的输入。通过对比控制前后车辆运动状态来评估组队协同控制算法的有效性。
仿真试验是依托Webots进行的。Webots由Cyberbotics公司开发,是一款亚微观的、高逼真度的开源多平台机器人仿真软件。目前,Webots已经支持自动驾驶车辆仿真,可以实现交通场景编辑或者真实道路地图导入。由于无法获知Mirror-Traffic数据集的车辆数据采取时的真实地点,因此只能基于合流区道路相关参数在Webots中搭建合流区道路仿真场景。本文基于Webots平台,搭建了高速公路合流区道路场景,并设置了合流区9辆车的初始位置。
3.2 结果分析
本文首先基于车辆通行次序决策算法得到最优通行次序,然后结合分布式一致性算法对合流区车辆进行协同控制。基于合流区车辆的初始位置以及初始速度,队列期望速度为22 m/s,期望间距为20 m。
基于组队规则,编号为1、2、3的车辆被分为一组,被视为一辆车。基于物理约束,可以得到21种合流区车辆通行次序可行解空间。
结合车辆通行时间分配算法以及基于通行时间和通行延误的成本函数,求解获得最优通行次序。不同通行次序的成本见图7,可知,通行次序编号为8~21的通行方案的成本相同,即这14种通行方案都是最优解。不失一般性,选取编号9的通行次序作为车辆通行组队方案,即车辆的通行次序为1→2→3→4→5→6→7→8→9。

图7 不同通行次序的成本
在车辆队列系统协同控制过程中,假定通行时延为常数,即τ=0.2 s。车辆队列系统通信拓扑采用PFL,即队列车辆只接收来自前车和头车的纵向位置、纵向速度、纵向加速度信息。结合分布式一致性协议,可以得到表示车辆队列系统通信拓扑的拉普拉斯矩阵。
为防止车辆在协同控制过程中速度降低过快,并满足车辆的动力学特性以及乘坐的舒适性,需要增加车辆的速度约束和加速度约束。车辆的速度约束和加速度约束分别为:
(21)
式中:vlower为车辆速度下限,取12 m/s;vlim为公路最高车速,取22 m/s;ai为车辆加速度;amin为车辆最大减速度,取-4 m/s2;amax为车辆最大加速度,取4 m/s2。
结合车辆实际位置,得到队列车辆的纵向误差轨迹图。队列车辆的纵向误差为:
(22)

合流区车辆在协作合流过程中的轨迹见图8。图中纵坐标50 m处表示合流点的位置。从图中可以看出,匝道车辆行驶到合流点前,车辆队列系统已经达到稳定状态。合流区车辆位置误差见图9,可以看出,队列车辆的纵向误差都收敛,且纵向误差均不超过0.5 m。

图8 合流区车辆轨迹
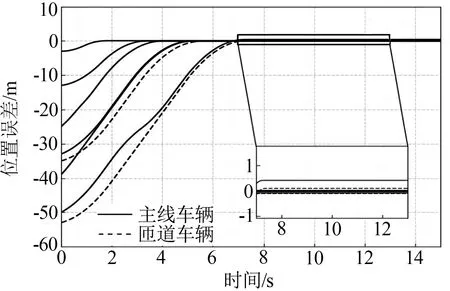
图9 合流区车辆位置误差
为进一步对比协同控制前后车辆合流效率,对匝道车辆换道合流时间、换道合流位置,以及换道合流时纵向速度进行对比,对比结果见表2。

表2 人工驾驶与协同控制两种工况匝道车辆合流指标对比
从表2可以看出,对合流区车辆进行组队协同控制后,匝道车辆合流时间降低,换道合流时的速度增加。其中,车辆4从初始状态到换道合流历经11.1 s,组队协同控制后,合流时间为5.9 s,合流时间缩短46.8%。另外,车辆4换道合流时的速度为17.84 m/s,与前车速度差为-2.03 m/s,与后车速度差为-1.57 m/s;车辆7的合流时间为16.5 s,利用组队协同控制算法之后,其合流时间为8.6 s,合流时间缩短47.9%。车辆7换道合流时与前车的速度差为-3.88 m/s。
可见,组队协同控制之后,匝道车辆的合流时间缩短。相比于人工驾驶车辆,利用组队协同控制算法的匝道车辆行驶到合流点时,其与主线上的前后车的速度差均为0。这就降低了匝道车辆换道合流时的行车风险。
4 结论
本文提出了基于最优化的合流区车辆通行次序决策方法。为减少车辆通行次序可行解空间,缩短规划时间,并保证找到足够好的次优解,本文采取基于分组的通行次序决策算法。将车头时距小于给定阈值的车辆组成车辆队列,一个车辆队列看作一辆特殊的智能网联车辆,然后再进行通行次序规划。基于物理约束,构建分组后合流区车辆的通行次序可行解空间,利用最优化方法求解得到最优通行次序。为验证基于分组通行次序决策的有效性,结合车辆合流场景实例进行分析,并利用仿真对基于枚举法的通行次序决策方法以及基于FIFO的通行次序决策方法进行对比分析。结果表明基于分组的通行次序决策算法可以得到近似最优解,且求解速度满足实时性要求。
为缩短规划时间,同时保证找到足够好的次优解,本文采取基于分组的协作式合流策略。将合流区车辆看作一个特殊的车辆队列系统,结合车辆队列控制算法,可以实现合流区车辆的协同控制。该方法的关键在于将车头时距小于设定阈值的车辆组成车辆队列,将一个车辆队列看作一辆特殊的自动驾驶车辆,然后再进行最优通行次序求解。显然,同一车辆队列内车辆的通行次序是相同的,这就减少了通行次序决策的车辆数量,从而可以极大地缩小通行次序空间,减少求解时间。基于该方法对合流区车辆进行协同控制,能够提升合流区交通流安全性,提高交通流效率。
猜你喜欢
数学小灵通·3-4年级(2020年12期)2021-01-14 00:58:54
戏曲研究(2020年4期)2020-07-22 06:32:22
机械制造文摘(焊接分册)(2018年4期)2018-09-13 05:08:14
数学物理学报(2017年5期)2017-11-23 07:51:07
共产党员·上(2017年8期)2017-09-18 07:28:07
中国交通信息化(2017年4期)2017-06-06 07:21:56
中国交通信息化(2017年2期)2017-06-06 05:49:47
中国交通信息化(2016年1期)2016-06-06 06:55:33
中华胰腺病杂志(2015年5期)2015-12-08 12:18:13
中国交通信息化(2015年9期)2015-06-06 06:37:42
