
基于卡尔曼滤波的液压升塔控制方法研究*
2023-11-21 13:08:08萧定辉卞佳音何泽斌陈建强林新生曾庆华郑子杰
电子器件 2023年5期
胡 燃,萧定辉,卞佳音,何泽斌,陈建强,林新生,曾庆华,郑子杰
(1.广东电网有限责任公司广州供电局,广东 广州 510000;2.华南理工大学自动化科学与工程学院,广东 广州 510000)
随着输电杆塔周围电网的快速发展,输电杆塔基础被掩埋或者输电线路导线跨越道路、建筑物时导线对于跨域物净空距离不足等安全隐患事件频繁出现。目前国内行业中常规采用的解决方法是在杆塔附近新建一座高杆塔,再拆除旧的低杆塔,这样的方案耗时长、成本高,而且杆塔附近不一定具备施工条件。所以在满足安全条件下,能够使杆塔原地升高对于解决该类问题具有积极的现实意义,不单单能够解决导线对地安全距离不够的安全隐患,还能最大限度地节约停电时间、减少施工成本。
杆塔整体提升常用的方法有两种:一种是吊车式整体提升,通过大型吊车,将杆塔整体提升,其方案要求施工现场具有大型吊车进场条件,施工费用高。一种是抱杆式的整体提升,通过四条抱杆,以液压机将杆塔四条主材同时提升到一定的高度,与吊车提升方法相比,该方法对周围施工环境要求不高,其能够实现自动化、电子化,减少吊车人工操作造成的风险。而液压升塔的实现中最重要的是在升塔过程中对塔身姿态的精准测量并以此基础对升高过程中进行杆塔调平。传统的方法以经纬仪监视铁塔的高度,以卷扬机拉线稳定杆塔,保证铁塔垂直升高[1-4]。传统方法中缺乏塔身姿态测量对杆塔提升和调平的优化,卷扬机拉线稳定杆塔可能会使杆塔受力不均发生倾斜倒塌,其安全性难以保障。为了能够提高杆塔提升和调平的安全性,需要监控铁塔倾斜角度,并根据倾斜角度合理调节不同液压杆的上升速度和高度。目前液压调平控制研究中有房怀英等[5]提出的采用角传感器作为控制量输入器,并以模糊PID 作为调平控制方法来实现对沥青砂浆车液压的调平。有王冰[6]提出的基于PID 神经网络对调平系统进行控制的方案。有史海红[7]提出的对混凝土摊铺机调平装置采用人工神经网络控制器来代替传统的测量和控制方式。有冯仪等[8]提出的车载雷达机电式自动调平控制系统。在以上研究中仅仅考虑了液压调平算法的优化,并没有考虑作为液压调平算法所依赖的测量数据的优化。
结合以上研究,本文提出利用液压杆整体提升杆塔的方法,在提升输电塔的时候,采用IMU 和毫米级的RTK 传感器测量塔身倾斜角度,并以卡尔曼滤波对其数据进行预测和更新去噪,对利用PID 控制算法控制液压缸的提升速度更有效准确,最终实现整体提升过程中塔身处于无倾斜的姿态,防止倾斜角度过大导致输电铁塔倾倒。此方案能够以电子设备代替人力,保证施工的安全性,提高施工效率。
1 提升塔身过程中水平状态的模型分析
本文提出方案是利用四个液压杆对其塔身同时进行提升,如图1 所示。

图1 液压升塔模型
在提升过程可能会因为液压杆或控制信号延迟的因素,导致上升速度不同步的情况,这时候提升塔身过程中需要保持塔身处于一个安全的水平状态,当塔身发生较大倾斜的时候需要对其进行调平,调平后才能继续提升作业至规定要求。对其塔身水平状态进行模型分析是输电线路杆塔提升过程中自动调平理论分析的关键,也是进行调平研究的基础[9]。
所以对于倾角的测量至关重要,然而并没有仪器可以直接读出其倾角的具体值。本文利用IMU获取其x轴、y轴、z轴方向的加速度值和利用毫米级RTK 获取塔高对铁塔的倾斜状态进行预估。在输电铁塔的提升过程中,其运动状态为匀速运动,可以认为输电铁塔除重力外并不受其他明显外力的作用。IMU 这三个轴向的加速度值即物体的重力反映在每个轴上的分量,利用重力加速度与其三个分量之间的关系,能够计算出物体的姿态角度。输电铁塔的塔基平台在x轴、y轴、z轴的重力加速度分量与倾角的关系如图2 所示。
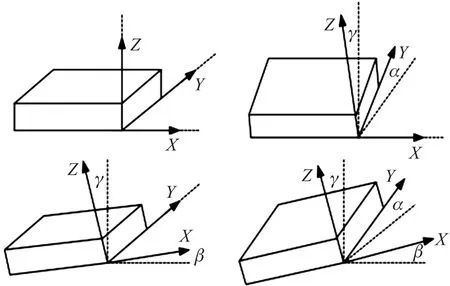
图2 三轴加速度分量与倾角的关系
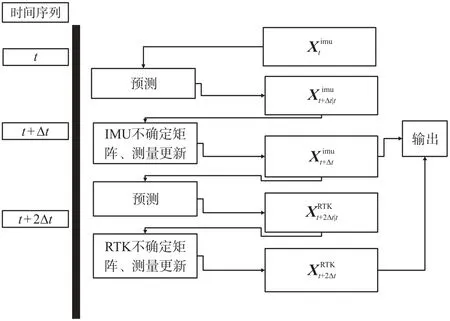
图3 数据融合流程图
以x轴为正方向,则输电杆塔与y轴的夹角α、与x轴的夹角β、与z轴的夹角γ可以视作输电铁塔绕x轴、y轴和z轴的旋转角度,本文利用α、β这两个夹角对塔身状态进行预估,利用γ作为调平误差的控制量。用反三角函数代表加速度传感器测量出的输电铁塔在x轴、y轴、z轴的加速度分量,考虑到反正弦函数的值域为(-π,+π),可以将α、β表示为以下公式:
传感器的位置应合理放置在塔上。例如,如果测量轴z轴正面临向上,测量轴x轴是与输电线路的方向一致,那么就可以通过对于传感器合理的布置获取需要的角度数据。此外,塔体相对于自然重力轴线的倾角可以计算如下:
利用上述公式,可以计算出弧度值的数据,经过弧角度换算,可以算得角度值。
但由于杆塔处于野外环境中,由于外在气象、地质环境及自身因素的影响,除了实际的摇摆和倾斜之外,振动杂波的干扰总是存在的[10]。但是加速度传感器的灵敏度较高,上述的干扰会极大地影响其精确性,降低施工的安全性。因此有必要利用卡尔曼滤波算法对所采集到的IMU 数据与毫米级RTK的数据进行融合判断。
2 基于卡尔曼滤波的多传感器融合算法
对于铁塔倾角数据采集,可以实时地从IMU 加速度传感器读取三个轴的加速度值,并实时计算上述α、β和γ角度值,再根据毫米级RTK 测量铁塔高度h。这时候能够得到由两个在不同时间频率上传感器采集的两个数据对同一个目标的描述[11],本文利用卡尔曼滤波算法对其进行数据融合。
所以在一个相对较短的Δt得到角值数据序列。振动噪声为高斯分布,故可用一个线性微分方程来描述。使用IMU 对铁塔状态进行估计,铁塔在提升过程中假设为匀速上升运动,那么定义其在t时刻的状态向量为:
式中:xt+Δt|t为基于t时刻的状态对铁塔状态进行预测,u为外部影响,在该模型中不受外力影响,无加速度,即u=0。F为状态转移矩阵:
式中:Q为过程噪声,然后预测完毕,对其进行测量数据更新。
式中:,htower为杆塔塔身高度,htowercos为根据三角关系计算的杆塔塔身的实际高度,v·Δt为在Δt时间中杆塔提升的高度,两项之和为t+Δt时的塔尖高度。毫米级RTK 同样使用上述卡尔曼滤波进行预测和更新,不同在于:
3 液压缸控制算法
在卡尔曼滤波下从IMU 获取α、β作为控制器调平策略选择变量,根据液压杆特性,液压杆若允许下降导致电力塔抖动,使得铁塔造成更大的倾斜,所以液压升塔过程中的液压杆控制策略采取只升不降,并采取追逐最高点调平策略[12]。
对四个液压杆分别编号如图4 所示,然后制定图5、图6 所示的液压提升控制策略。
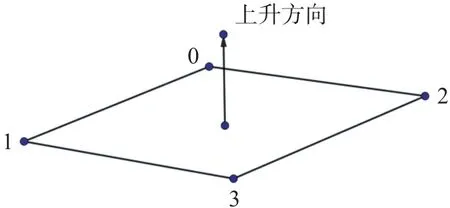
图4 四个液压杆编号图
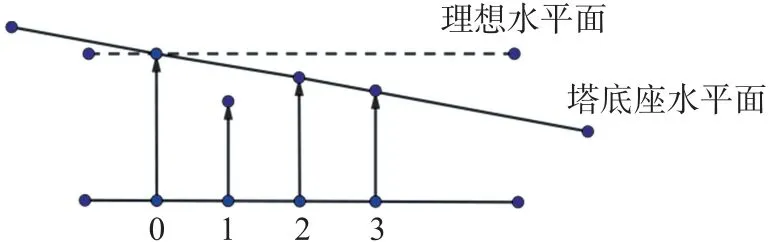
图5 追逐最高点调平图

图6 调平控制策略图
然后计算高度误差:
作为控制量,根据PID 控制算法进行控制。PID 公式为:
式中:u(t)是被控制量,e(t)是实际输出值和期望输出值之间误差,Kp是比例系数,KI是积分系数,KD是微分系数。PID 控制原理是基于系统输出值的反馈控制的,关键是把系统的输出值和期望值的误差作为控制量。其中Kp是直接影响到实际控制效果的,在合理的数值范围内Kp越大,控制效果越好,越短时间回到期望值,但也容易导致抖动,无法稳定于期望值;KD影响的是控制量向期望值靠近时的加速度,即使得靠近期望值的过程相对平滑;而只有KD控制会导致控制量一直与期望保持一个恒量差值,再者KI是来抵消这个恒量的。计算最终高度差:
式中:hfinal为最终设定升塔的高度。以Ep<σ作为抬升过程结束条件,其中σ为误差阈值。其控制流程如图7 所示。
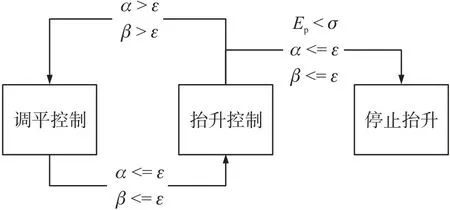
图7 控制流程图
4 实验分析与结果
4.1 实验条件
为了验证以上方法的可行性和有效性,我们在实验室搭建了液压升塔模型来进行仿真实验,如图8 所示,在模型塔中搭载IMU 和毫米级RTK 传感器监测升塔过程,仿真其升塔过程并测试了我们所提出的杆塔升塔方案。在实验中记录其升塔过程中IMU 和RTK 信息,验证其卡尔曼滤波的效果,并在实际升塔过程要求铁塔提升过程中倾斜角不可以超过3°,即ε=3°。在实验中模型塔的高度为70 cm,预升高高度为80 cm,设定实际高度和理想高度的差值不可以超过0.1 cm,即σ=0.1 cm,在实验过程中以是否超出该值来判断该方案的可行性。

图8 液压升塔模型
4.2 实验结果分析
在去噪更新预测的情况下,获得的测量数据会更加靠近真值,使得控制更有效。而其控制效果我们记录了杆塔升塔过程中α、β的变化曲线和高度误差,如图9、图10 所示。
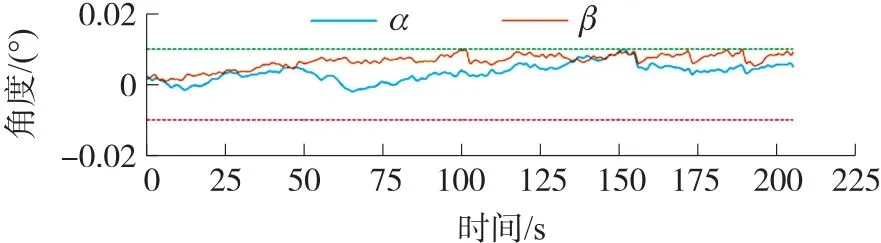
图9 α、β 的变化曲线图

图10 不同测量方案下的高度误差曲线
可以看出利用卡尔曼滤波使得传感器返回的数据更加平稳,去噪效果更好,而IMU 传感器返回的数据会随着时间的增加,误差会逐渐变大,这是因为IMU 传感器本身的特性所导致的,所以我们利用IMU 和毫米级RTK 传感器进行数据融合,使得IMU传感器本身误差会累积的特性得到很好消除。
从图10 中我们可以看出所提出升塔控制方案α、β的变化曲线和高度误差曲线变化并不剧烈,且从开始到升塔完成的过程中,能够被控制在阈值范围内,说明其控制是有效的,然后根据实际高度和理想高度的差值变化一直处于安全范围内,可以得出我们此升塔控制方案是可行的。
5 结论
我们提出了利用IMU 和毫米级RTK 的传感器在液压升塔过程中对铁塔高度、倾斜角度进行基于卡尔曼滤波的状态估计,并且对两种传感器在不同频率上进行数据融合,在实验中验证其测量数据更具鲁棒性。在保证数据真实可靠的前提下,我们提出以PID 为控制原理,以铁塔的水平倾斜角度设计了调平控制策略,并在实验中记录高度误差变化,验证了调平策略的有效性和可行性。
猜你喜欢
中国化肥信息(2022年3期)2023-01-05 03:42:41
港口装卸(2022年4期)2022-08-31 00:40:28
中国民间疗法(2021年5期)2021-06-09 09:21:08
机械工程与自动化(2020年4期)2020-08-25 02:06:58
孩子(2020年8期)2020-08-13 06:52:30
阅读与作文(小学低年级版)(2020年2期)2020-05-25 02:58:43
森林工程(2018年4期)2018-08-04 03:23:38
建筑机械(2018年4期)2018-06-04 06:35:20
航天工业管理(2017年4期)2017-05-12 01:16:35
电测与仪表(2015年21期)2015-04-09 11:52:08
