
基于回旋曲线的远程驾驶轨迹预测法
2023-11-20 07:14王锐松吴晓东
传感器与微系统 2023年11期
王锐松,吴晓东
(上海交通大学机械与动力工程学院,上海 200240)
0 引 言
随着网络通信技术的发展与5G 基站的普及,带宽的增加与网络稳定性的提升使得远程驾驶渐渐走入大众的视野并服务于千家万户[1]。以Phantom Auto 为代表的公司已经提供专门的纯人工远程驾驶服务并商用化[2]。日产与美国国家航空航天局(NASA)合作研发的“无缝自动出行”系统通过将自动驾驶和远程驾驶结合的方式,为驾驶员不适宜驾驶等场景提供了新的解决方案。
在远程驾驶汽车中,由于信息传输时延的存在,驾驶员对车辆实时位置的估计往往是个非常棘手的问题,同时也极易因此发生交通事故。针对此类问题,预测显示技术可以同时提高系统的稳定性和透明性,被认为是目前解决远程操作时延问题最具潜力的方法[3]。魏青等人[4]提出了一种基于时延的预测线式算法,通过把控制信号当作系统扰动,利用实验在线预测结果对该扰动进行前馈补偿的方式解决操作的预测显示问题。为平衡带宽与视野范围的关系,Bec´irbašic´D等人[5]针对5G 网络环境提出了一种根据网络环境调整视频传输方式的多摄像头画面传输方案。罗石等人则对车载摄像头采集到的图像进行相关优化[6]。汪知宇等人[7]则通过改进最小二乘支持向量机(LS-SVM)算法,提高了对通信网络时延预测的速率与准确性。黄可望等人[8]针对网络控制系统中随机双向通道时延引起的不确定性问题,提出一种基于时延在线预测模型改进的补偿控制方法。Zuo T 等人通过粒子群优化的LS-SVM 实时预测网络引起的延迟[9]。孔祥阳等人提出一种新的条带分离方法,较好保留遥感图像结构和细节信息的同时,去除了高浓度条带噪声[10]。
本文提出一种基于实时远程驾驶时延的回旋曲线轨迹预测法,通过在车辆采集的视频图像上叠加显示预测的车辆位置,帮助驾驶员预测实时的车辆行驶状态,提升了驾驶感受,同时大大提高了行驶安全性。
1 远程驾驶系统时延分析与测试
1.1 系统架构与传输时延
远程驾驶系统实现了远程实时监视车辆状态并操控车辆行驶。其系统架构主要包括三部分:受控车辆、云平台以及远程驾驶舱。驾驶员在操作驾驶模拟设备控制时,相应控制信息被读取后转化为控制报文,经由云服务器发送至车端控制器上。车端控制器收到此条报文后将其中控制信息转化为控制器局域网(controller area network,CAN)信息并发送至总线上实现控车。系统整体架构如图1所示。
远程驾驶员可通过摄像头时刻观察车辆的响应动作,但受网络信息传输和视频流编解码的时延影响,驾驶员观测到的车辆会略迟于实际行驶中的车辆。与此同时,车辆响应控制指令同样受到控制信息时延的影响。由此可见,控车指令从发出到驾驶员观察到车辆响应的远程驾驶时延tr,主要由车辆响应控制指令时间以及视频传输时延组成。当车速为v0时,由于时延导致的延迟观测距离ld如式(1)所示
可见,当车速为40 km/h时,每增加100 ms的延迟都会使观察到的车辆实际位置与视频中观测的距离差扩大1.1 m以上。
1.2 系统时延测试
为获得真实的远程驾驶时延数值,搭建远程驾驶实物模型并测试5 000条控制信息以及在该段时间内视频传输时延。其中,控制信息的测试方案为:首先,将车端控制器与远程驾驶舱中控制器通过网络时间协议(network time protocol,NTP)实现时间同步;其次,通过在控制信息报文中添加时间戳的方式,收发报文时刻的时间戳数值差即为该条报文的时延值。
李庆伟等人提出多种方案测试并比较视频传输的时延[11]。考虑到本文系统视频传输特性,视频时延的测试方案为:在远程驾驶舱内显示器中开启一个精确到毫秒的计时器。将与车端控制器相连的车载摄像头对准显示器,并通过实时消息传送协议(real-time messaging protocol,RTMP)推拉流的方式,在远程驾驶舱内拉取视频并播放。此时,显示屏内存在2 个实时播放的计时器。通过截屏的方式即可获得视频传输时延(即2个计时器数值差)。时延测试统计结果如表1所示,其中控制信息的发送周期为20 ms;视频流编解码方式为H.264/AVC,分辨率为720 p,30 fps。
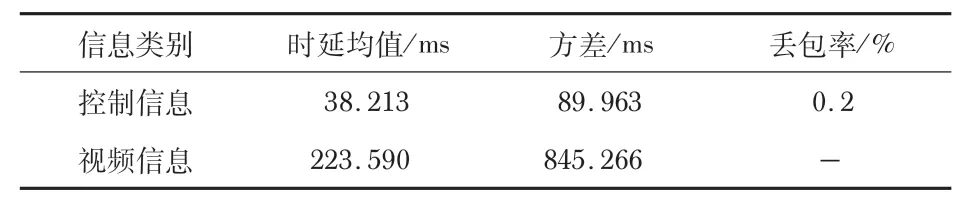
表1 远程驾驶时延测试统计
2 回旋曲线预测法
回旋曲线一般是曲率连续变化的样条曲线,它使整条曲线中不同半径的弧线之间得以平滑过渡,因此经常被用于高速公路线路设计中。在基于回旋曲线法的车辆轨迹预测方面,首先假设车辆将保持当前速度移动,其次假设当前车辆行驶轨迹的曲率C0将维持当前曲率变化率C1,最后通过数学积分的方式预测车辆轨迹。
考虑到对于一般情况,控制车辆转弯时,为防止车辆出现轮胎滑移的现象,驾驶员会相对柔和操控转向盘。因此车辆行驶轨迹的曲率也会无级变化。当车辆直线行驶时,时延导致的视频传输显示误差主要跟当前车速有关。同时,基于现有的车辆转向结构,车辆行驶轨迹的曲率变化率取决于驾驶员转动转向盘的速率。因此,回旋曲线基本满足预测车辆的运动的需求。
其中,航向角φ、世界坐标系下回旋曲线中x与y轴坐标值随行驶距离l的变化如式(3)与式(4)所示
式中x0与y0为车辆当前的经度与纬度,φ0为车辆当前的航向角,v为当前车辆车速。
将式(5)代入至式(3)和式(4)中,即可得到航向角φ、x与y轴坐标值随时间t的变化关系
根据式(2)易得,当前车辆行驶轨迹的曲率C0,c和曲率变化率C1,c可通过航向角的变化率˙φc和车辆当前速度vc获得,即
其中,下标c和c-1 分别对应于车辆在tc和tc-1时刻的车辆状态。
式(6)与式(7)中预测的信息需要依赖车辆在世界坐标系中的经纬度信息x0与y0以及航向角φ0。但通过回旋线预测的车辆位置用于显示在视频图像上,而采集视频信息的摄像头相对于车辆处于固定位置。因此,初始位置x0与y0以及航向角φ0可以设置为0。
对式(7)以步长Δt=0.01 s进行离散化处理。预测的时间跨度td为视频传输时延。时间tp=tc+td是车端视频到达显示屏的预测时间点。因此,车辆在tp时刻的航向角φp以及经纬度信息xp与yp如式(10)和式(11)所示
3 回旋曲线模型建立
3.1 构建车辆运动学模型
首先对车辆进行运动学建模。描述车辆运动通常涉及2个坐标:世界坐标系XOY和车身坐标系xoy。假设车辆在任意时刻作直线运动或者绕某个点做圆周运动,忽略悬架的作用,就可以得到车辆的转向运动模型。车辆运动学模型如图2所示。其中,(Xf,Yf)与(Xr,Yr)分别为车辆前轴中心和后轴中心在惯性坐标系下的坐标,vr为车辆在后轴中心处的速度(m/s),l为轴距(m),R为后轴中心瞬时转弯半径(m),δf为前轮偏角(rad),φ为车辆航向角(rad)。

图2 车辆运动学模型
在后轴行驶轴心(Xr,Yr)处,速度vr为
横摆角速度ω为
结合式(12)~式(14)可得到车辆运动学模型为
3.2 回旋曲线模型预测实验
根据第一章的相关实验结果,可以假设控制信息时延tc为50 ms,视频信息控制时延tv为250 ms,车辆反馈时延tb为50 ms。因此,式(10)中的预测时间跨度td为250 ms。信息传递流程如图3所示。

图3 信息传递流程
通过Python对回旋曲线预测法建模并进行相关测试。模型中,驾驶员操控转向盘沿固定振幅与频率的正弦曲线变化,如图4(a)所示。其中,控制车辆速度维持在40 km/h,仿真结果如图4(b)与图4(c)所示。
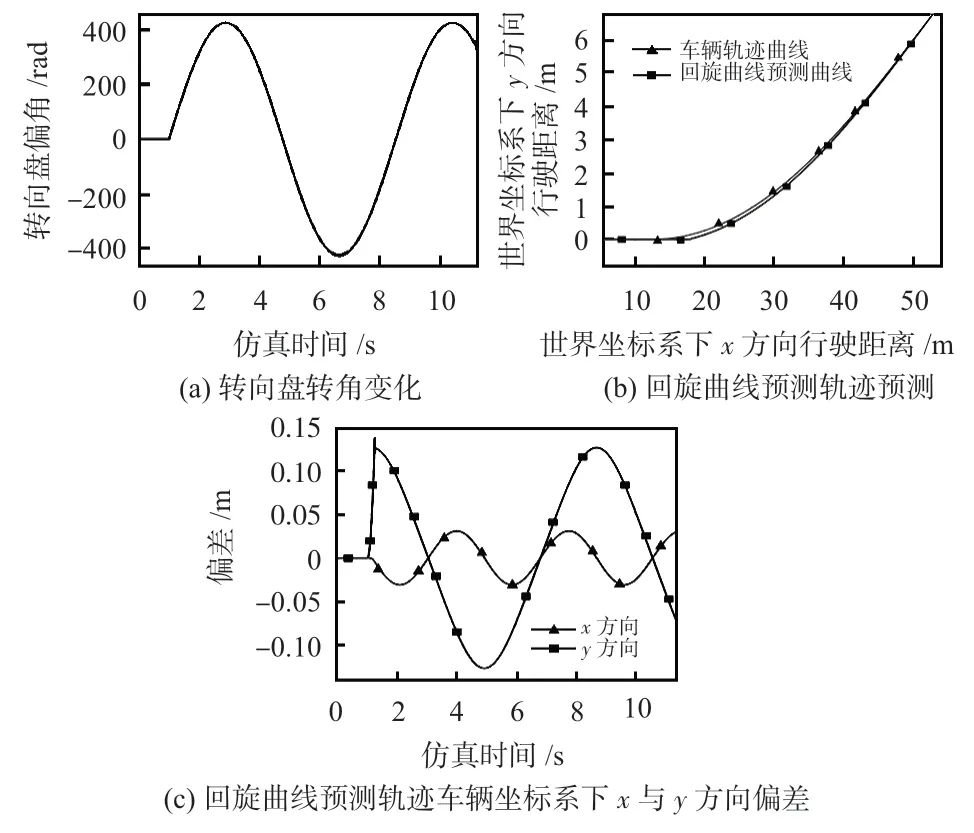
图4 仿真结果
根据图4不难看出,在匀速直线行驶时,车辆轨迹中的曲率C0,c和曲率变化率C1,c均为0,因此预测结果与实际差距不大。当转向盘从中置切换至呈正弦曲线变化时,由于回旋曲线法仅通过车辆状态信息预测位置,因此,预测轨迹与实际轨迹在水平方向上偏差较大,最大偏差距离达到138.6 mm,而沿行进方向的偏差最大值仅有31.1 mm。
根据仿真计算出的结果,在车辆采集的视频图像上的相应位置叠加显示预测的车辆位置,叠加后的图像效果如图5所示。

图5 摄像头采集视频与预测车辆位置叠加
4 利用控制信息修正回旋曲线模型
由图4(c)可以看出,由于远程传输时延的存在,车辆从直行状态转动转向盘后,车辆水平方向的预测轨迹与实际行驶轨迹将产生较大差异。与此同时,目前系统输入仅有车端状态数据。为了弥补该部分影响,在仿真模拟的参数中,加入控制转向盘的转角信息。信息传递流程如图6所示。

图6 考虑驾驶员输入的信息传递流程
根据图6,在式(11)的输入参数中加入tm=tc+td-tk时刻的驾驶员控制信息参数进行预测修正,修正后的回旋线预测如式(16)所示
式中tk为远程控制器与车辆之间的报文传输时延,λ为修正系数,vm为车辆在tm时刻的车速,φm为转向盘转角,k为受控车辆转向系统角传动比。
为评估修正过的回旋曲线预测方法准确性,采用3.2节中描述的测试方式,以车辆速度(20,30,40,50 km/h)、方向盘角度(180°,270°和450°)和修正系数(0.3 和0.7)为模型输入参数进行测试。两种预测模型的预测位置与实际行进路径的最大偏差值与其输入参数变化对比如表2所示。

表2 修正的回旋曲线模型与原模型偏差对比
由表2中数据结果可知,回旋曲线预测结果偏差随着车速与转向盘幅值的增加而线性增加。在车速为50 km/h时,转向盘幅值为450°的最大偏差为172.9 mm,而当转向盘幅值降至270°时,最大偏差仅为103.8 mm。
与此同时,预测模型输入参数加入控制信息后,偏差值大幅下降,修正系数为0.7,40 km/h 的车速下,相对于未修正的回旋线预测结果,最大偏差值降低了81.933 mm,预测轨迹如图7 所示。可见,修正后的回旋曲线预测模型能较大程度地降低预测偏差。

图7 修正后回旋曲线轨迹预测对比
5 结 论
本文通过回旋曲线法对远程驾驶车辆的行进轨迹进行预测,以削弱由于视频时延导致驾驶员对车辆实际位置估计不准确问题的影响。同时,为了提高回旋曲线法的预测精度,在模型输入参数中加入了驾驶员控制信息,并通过引入修正系数的方式,较大程度上提高了回旋曲线法的预测精度。最后,将数值结果转化为相对车辆的位置距离,通过在回传视频图像上叠加虚拟车辆的方式,将预测结果直观动态地展示在驾驶员的眼前。修正后的模型最大预测偏差在所测试工况下均低于10 cm,该精度几乎可以满足日常远程驾驶的全部需求,保障了远程驾驶行车安全。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年4期)2022-03-07
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
电子制作(2019年23期)2019-02-23
测控技术(2018年6期)2018-11-25
现代装饰(2018年5期)2018-05-26
中国三峡(2017年2期)2017-06-09
系统工程与电子技术(2016年7期)2016-08-21
公民与法治(2016年4期)2016-05-17
