
无人机协助WSNs中的节能数据采集策略*
2023-11-20 07:14曹润宇姜泽峰张善新
传感器与微系统 2023年11期
曹润宇,姜泽峰,张善新
(1.江南大学人工智能与计算机学院,江苏 无锡 214122;2.江南大学物联网工程学院,江苏 无锡 214122)
0 引 言
无线传感器网络(wireless sensor networks,WSNs)通常由大量低成本传感器节点(sensor nodes,SNs)组成,这些节点能够使用的能源通常有限,而且能源一旦被耗尽就很难再充电[1]。而对于大多数传感器网络应用来说,空闲监听是造成能源浪费的一个重要原因[2]。因此,为使每个SNs以最小的能耗完成数据传输,SNs 的唤醒时间需要被合理设计。此外,考虑到无人机(UAV)低成本、高机动性的特性,使用无人机进行数据采集是非常有前景的方案。但是,无人机的机载能量也很有限,需要合理设计其飞行轨迹,以延长无人机的续航时间。近年来,针对WSNs 中数据采集的能耗问题已经展开了大量的研究[3]。文献[4]中设计了一种异常驱动的WSNs能耗均衡路由算法,以降低传感器在数据采集阶段的能耗。然而作者并没有考虑到在数据采集过程中传感器的空闲监听造成的能源浪费问题。文献[5]中严格推导了旋翼无人机的能量消耗模型,研究了目标约束下无人机能量最小化问题。但是作者没有考虑SNs的能耗。文献[6,7]中研究了多架无人机的机动性和部署,以收集物联网设备的数据,目的是使所有物联网设备的能量消耗最小化。但上述工作并没有考虑无人机的推进能耗。
针对上述研究现状,本文提出了一种联合优化SNs 唤醒调度和无人机轨迹设计的数据采集策略,通过合理分配SNs的唤醒时间使其在信道最好的条件下完成数据传输以降低能耗,同时通过优化无人机的飞行轨迹进一步降低了无人机的推进能耗。基于该方案构建了无人机和SNs加权能耗最小化问题。针对该非凸优化问题,本文提出一种基于路径离散化和连续凸逼近的联合优化算法进行求解。此外,本文还根据不同权重因子研究了无人机与SNs能耗之间的平衡关系。在实际场景中,可以根据需求调整权重以实现两者之间灵活的平衡。
1 系统模型与问题描述
1.1 系统模型
本文考虑一个无人机协助的WSNs,其中一架无人机作为移动数据收集器从部署在地面上的k个SNs 收集数据,SNs用集合K={1,…,k}表示。不失一般性,本文考虑一个三维笛卡尔坐标系模型,SNs 的水平坐标记为wk=[xk,yk]T∈2×1,k∈K,定义Lk为需要从SNs 收集的数据大小。假设无人机以时分多址(TDMA)方式进行数据采集,飞行高度为H,飞行周期为T。无人机在t时刻的坐标可以表示为q(t)=[x(t),y(t)]T∈2×1,0≤t≤T。假设无人机的初始位置和最终位置是预先确定的,其坐标分别记为q0和qF,此外,假设无人机的最小、最大速度分别为Vmin和Vmax。因此,无人机的飞行轨迹以及飞行速度需要满足如下约束
式中β0为在参考距离d0=1 m处的信道功率增益,α0为路径损耗指数。
1.2 通信模型
为了节省SNs的传输能耗,每个SNs只在无人机靠近时唤醒,进行数据传输。本文通过引入二进制唤醒调度变量ak∈{0,1}来表示SNs的状态,即ak(t)=1 表示SNs在t时刻被唤醒向无人机传输数据,否则,ak(t)=0。由于本文采用时分多址的方式进行通信,因此传感器唤醒调度变量有如下约束
用pk(t)表示每个SNs进行数据传输时的发射功率,第k个SNs与无人机之间在t时刻的数据传输速率为
式中B为信道带宽,σ2为自然噪声功率。此外,为了保证每个SNs的数据采集要求,有如下约束
一般情况下,无人机的能量消耗由通信能量和无人机推进能量两部分组成。但是在许多实际场景中,通信能量远小于推进能量,因此本文忽略无人机通信相关能量。那么,固定旋翼无人机的推进能耗可以建模为[9]
式中θ1和θ2为与无人机重量、机翼面积、翼展效率等相关的参数。此外,SNs的传输能耗可以表示为
从上述模型可以看出,SNs的能耗与唤醒时间以及信道质量有关,唤醒时间越低传输能耗越低。因此,为了实现高效传输,只有当无人机飞行至距离SNs更近时才会唤醒SNs并与其通信。但是,这会以无人机的推进能耗作为代价。因此,SNs传输能耗和无人机推进能耗之间存在如下权衡关系
式中λ∈[0,1]为权重因子,在实际场景中可以通过不同的权重来平衡无人机和SNs之间的能耗。ω为能耗补偿因子,因为SNs与无人机的能耗通常不在一个量级[10](例如,千瓦的数量级与单位瓦特的数量级)。
1.3 问题描述
本文的目标是在保证每个SNs 的数据采集需求前提下,通过联合优化SNs的唤醒调度ak(t),发射功率pk(t)以及无人机飞行轨迹q(t),最小化SNs和无人机的加权总能耗。最终,能耗最小化问题可以描述如下
式中Pmax为SNs 最大发射功率,V0为无人机初始速度。由于该问题涉及无限个变量,目标函数涉及积分上限变量T,以及存在非凸约束(10a)和离散二进制约束(10b)。因此,该问题是一个混合整数非线性规划(mixed integer nonlinear programming,MINLP)问题,难以直接求解。
2 问题解决
由于问题(10)是以飞行周期T作为积分区间的上界,并且由无限个紧密耦合的优化变量组成的非凸优化问题,很难直接求解。因此,本文首先使用路径离散化方法将原问题转化为具有有限个变量的优化问题。
2.1 路径离散化重构
首先,将无人机的飞行轨迹离散为N条线段,这些线段由N+1 个点{q[n],0≤n≤N}组成,其中q[0]=q0,q[N]=qF。在这种路径离散化状态下,假设无人机在每个线段内的飞行距离满足
其中,Δq被设置的足够小,因此SNs 与无人机之间的距离在一个线段内近似不变。此外,定义v[n]为无人机在第n条线段末的速度,δ[n]为无人机在第n条线段停留的时间,即假设无人机在每条线段内以匀加速飞行,那么可以得到无人机的位置与速度之间的关系
同时,式(5)中的传输速率可以重新表示为
定义xk[n]为第k个SNs与无人机在第n条线段上进行通信时的唤醒时长,那么约束(4)可以被重新表示为
为了便于描述,分别定义变量Q≜{q[n]},P≜{pk[n]},V={v[n]},X={xk[n]}。那么,问题(10)中的加权总能耗可以表示为
此时,问题(16)仍然是非凸的。接下来,本文基于连续凸逼近技术提出一种联合优化算法进行求解。具体的,首先将问题(16)解耦为2 个子问题,即SNs唤醒调度和无人机速度优化问题,以及发射功率优化问题。然后交替优化这2个子问题,直到目标值收敛。
2.2 SNs唤醒调度和无人机速度优化
在给定SNs发射功率前提下,SNs 唤醒调度和无人机速度优化问题可以表述为
由于式(16a)中的[n]关于变量q[n]是非凸的,问题(17)仍然是非凸优化问题。本文首先引入松弛变量Φ={φk[n]},O={o[n]},其中,φk[n]≤[n],o[n]≤‖[n]‖,并定义使原问题变为更易处理的等价形式
此时,目标函数已经被重新描述为关于变量V,X,O的凸函数。但是,约束(18a)~(18d)仍然是非凸的。为了处理上述非凸约束,下面使用连续凸逼近算法在每次迭代中,获得原始函数在给定局部点上的下界表达式。具体地,在约束(18a)中,通过将表达式[n]+[n])在第r次迭代中给定的局部点xk[n](r)和φk[n](r)应用一阶泰勒展开式得到
对于约束(18b),在第r次迭代中,将[n]在给定的局部点q[N](r)应用一阶泰勒展开式得到其下界[n]。接下来,在(18c)和(18d)中使用同样的方法,可以获得‖v[n]‖2和‖¯[n]‖2的下界~[n]和[n]。此时,问题可以被近似为
由于连续凸逼近算法保证单调收敛[11],因此问题(20)能保证收敛到满足KKT 条件的局部最优解。此时,问题(20)已经转化为凸问题,可以用标准的凸优化算法求解。
2.3 发射功率优化
在给定SNs唤醒调度和无人机速度以及轨迹前提下,传感器发射功率优化问题可以表述为
由于目标函数以及约束条件(16a)中的[n]均为关于pk[n]的凸函数。因此,问题(21)是一个凸优化问题,可采用标准的凸优化算法求解。
2.4 联合优化算法
本文基于连续凸逼近技术,提出一种联合优化算法求解优化问题。具体地,在每次迭代中,固定其他变量时,分别通过求解问题(20)、(21)得到无人机轨迹、速度、SNs 唤醒时间最优解,以及发射功率的最优解。此外,每一次迭代的解将会被当作下一次迭代的输入,直到算法收敛。
定义(Q(r),P(r),V(r),X(r))为问题(16)在第r次迭代的最优解,E(·)为问题(16)的目标函数值,那么有
其中,第一个不等式成立是因为在给定局部点q[n](r),xk[n](r)和φk[n](r)时通过求解问题(20)获得的局部最优解Q(r+1),V(r+1)和X(r+1)使得(16)中的目标函数值非递增。第二个不等式成立是因为求解问题(21)获得的P(r+1)是全局最优解。因此,问题(16)在每次迭代后,目标函数E(Q,V,X,P)是单调非递增的。由于E(Q,V,X,P)是有下界的,因此算法一定会在有限的迭代次数内收敛。
算法1:联合优化算法
1)初始化Q0,V0,X0,P0,并设置迭代次数r=0 和阈值ε=0.000 1;
2)while|Etotal(X,V,P)(r+1)-Etotal(X,V,P)(r)|≥εdo;
3)给定Q(r),V(r),X(r),P(r),通过求解问题(20)获得最优解无人机轨迹Q(r+1),无人机速度V(r+1)和SNs 唤醒时间X(r+1);
4)给定Q(r+1),V(r+1)和X(r+1),通过求解问题(21)获得SNs发射功率最优解P(r+1);
5)更新迭代次数r=r+1;
6)end while。
3 仿真结果
假设一个SNs 数量为K=5 的WSNs,SNs 随机分布在1600 m×1600 m内。其他参数设置:B为1 MHz,T为100 s,α0为2,δ为1s,β0为-60dB,σ2为-140dB,H为100m,Vmax为50 m/s,Vmin为3 m/s,ω为103,Lk为80 MB,q0为[-800,-800]T,qF为[800,800]T,θ1,θ2分别为0.006 1,15.9。
图1 描述了不同权重因子下无人机的飞行轨迹,可以看出当λ减小时,由于SNs能量消耗更重要,无人机会调整其飞行轨迹,尽可能靠近SNs以获得更好的通信信道;而当λ增大时,无人机的能耗更为重要,因此无人机会选择路径更短的轨迹,以减少推进能耗。

图1 无人机的飞行轨迹
图2 描述了不同权重因子下无人机的飞行速度。可以看出,当无人机飞行到每个SNs附近时,其飞行速度会降低甚至在SNs上空盘旋以获得更好的信道效果。此外,当λ增大时由于无人机的飞行距离变短,因此无人机需要在SNs附近盘旋更长的时间来完成数据采集任务。

图2 无人机的飞行速度
图3 描述了同权重因子下每个SNs的唤醒时间分配。可以看出每个SNs始终处于休眠状态,直到无人机靠近时将其唤醒。因为将唤醒时间分配给更好的信道通常会带来更高的传输效率。此外,随着λ的值由0.2 增大到0.8,SNs唤醒时间从29 s增加到了40 s。因为当λ增大时,无人机的能量消耗更为重要,所以需要更长的时间完成任务传输,但这会以SNs的能耗作为代价。

图3 SNs的唤醒时间分配
分别与其他几种算法进行了比较:1)SNs能量最小化:只考虑SNs能耗;2)无人机能量最小化:只考虑无人机能耗;3)最大旅行商问题(travelling salesman problem,TSP)算法;4)时间最小化算法:以任务完成时间最小化为优化目标;5)固定功率:SNs的发射功率保持不变。
图4 为加权总能耗与数据大小之间的关系,其中权重因子设为λ=0.6。本文算法通过合理分配SNs 的唤醒时间,有效避免了SNs空闲监听能耗,同时通过优化无人机轨迹进一步降低了无人机的推进能耗,可以看出本文算法在相同数据大小下明显优于其他算法。此外,随着收集数据的增加,能耗随之增加,这是因为数据量的增加会导致SNs唤醒时间增加从而导致SNs传输能耗增加。

图4 不同数据大小下的加权总能耗
图5 为飞行周期T对加权总能耗的影响,其中权重因子设为λ=0.6。可以看出,随着飞行周期的增加,能耗不断降低。这是因为较大的飞行周期使无人机能够充分调整其轨迹,从而有效改善无人机与SNs之间的信道条件,减少了能耗。值得注意的是,由于本文优化了传输功率让SNs在不同的信道条件下自由调整其发射功率大小,因此,在飞行周期减小时,本文算法与其他算法之间的差距越来越大。

图5 不同飞行周期下的加权总能耗
图6 为无人机能耗与SNs能耗之间的权衡关系。可以看出,随着权重因子λ的减小,SNs 能耗降低,无人机能耗增加。这是因为SNs能耗的减小会以无人机飞行距离为代价。此外,SNs能耗最小化以及无人机能耗最小化算法分别只考虑了SNs能耗以及无人机能耗,即对应于λ=0 和λ=1两点。而时间最小化和TSP 算法由于只考虑了时间和路径最小化,同样只能对应图中单个点的坐标,而本文算法可以根据实际场景来调整获得无人机能耗与SNs 能耗之间灵活的平衡。
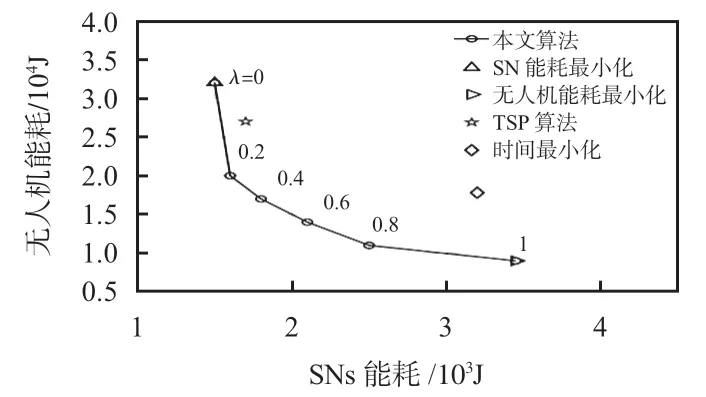
图6 不同权重因子下无人机能耗与SNs能耗之间的关系
4 结 论
为了降低数据采集过程中的能耗,本文提出一种基于SNs唤醒调度和无人机轨迹设计的节能数据采集策略,以最小化无人机和SNs 的加权总能耗。为了求解MINLP 问题,本文提出了一种基于路径离散化与连续凸逼近的联合优化算法。实验结果表明,本文所提出算法与其他算法相比更具优越性,能显著降低系统能耗,并且能在无人机和SNs的能耗之间取得灵活的平衡。
猜你喜欢
小学生学习指导(高年级)(2021年5期)2021-05-18
小学生学习指导(低年级)(2019年3期)2019-04-22
小学生学习指导(低年级)(2019年4期)2019-04-22
小学生学习指导(低年级)(2018年12期)2018-12-29
无线互联科技(2017年24期)2018-01-22
中国管理信息化(2017年18期)2018-01-04
物联网技术(2017年2期)2017-03-15
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
华东理工大学学报(自然科学版)(2015年4期)2015-12-01
电子设计工程(2015年8期)2015-02-27
