
Energy-Efficient Data Collection over Underwater MI-Assisted Acoustic Cooperative MIMO WSNs
2023-11-18 08:12QingyanRenYanjingSunSongLiBinWangZhengdaYu
China Communications 2023年11期
Qingyan Ren ,Yanjing Sun ,Song Li ,Bin Wang ,Zhengda Yu
1 School of Information and Control Engineering,China University of Mining and Technology,Xuzhou 221116,China
2 Department of Information Technology and Electrical Engineering,ETH Zurich,Zurich 8092,Switzerland
3 School of Communication and Information Engineering,Xi’an University of Science and Technology,Xi’an 710054,China
4 Xuzhou Engineering Research Center of Intelligent Industry Safety and Emergency Collaboration,Xuzhou 221000,China
*The corresponding author,email: yjsun@cumt.edu.cn
Abstract: Underwater magnetic induction (MI)-assisted acoustic cooperative multiple-input-multipleoutput (MIMO) has been recently proposed as a promising technique for underwater wireless sensor networks(UWSNs).For the more,the energy utilization of energy-constrained sensor nodes is one of the key issues in UWSNs,and it relates to the network lifetime.In this paper,we present an energy-efficient data collection for underwater MI-assisted acoustic cooperative MIMO wireless sensor networks(WSNs),including the formation of cooperative MIMO and relay link establishment.Firstly,the cooperative MIMO is formed by considering its expected transmission range and the energy balance of nodes with it.Particularly,from the perspective of the node’s energy consumption,the expected cooperative MIMO size and the selection of master node (MN) are proposed.Sequentially,to improve the coverage of the networks and prolong the network lifetime,relay links are established by relay selection algorithm that using matching theory.Finally,the simulation results show that the proposed data collection improves its efficiency,reduces the energy consumption of the master node,improves the networks’coverage,and extends the network lifetime.
Keywords: cooperative MIMO;cooperative MIMO size;data collection;heterogeneous UWSNs;relay link establishment
I.INTRODUCTION
In recent years,underwater wireless sensor networks(UWSNs)have gained widespread attention and have been greatly attributed to a variety of applications ranging from civilian to military areas [1–3].The collaborative nature of UWSNs gives it many advantages over wired systems,including self-organization,rapid deployment,and distributed processing capabilities.Nevertheless,the large monitoring area,severe wireless path loss,and limited capacity of underwater equipment batteries make UWSNs face many challenges compared with the terrestrial sensor network.The complex underwater not only requires reliable and real-time communications among the sensor nodes,but also long-range,high-throughput,and reliable communication between the sensor nodes and the remote surface base station.To meet these requirements,underwater MI-assisted acoustic cooperative MIMO WSNs,a new type of UWSNs,has been put forward by [4] and [5].Based on the experimental data and theoretical analysis given in [4] and [5],this network is considered as a promising approach to monitor the underwater environment.
The underwater acoustic MIMO can satisfy the long-range and high-throughput requirements and guarantee the network connectivity [6].However,it is challenging to place multiple transducers on a single device due to the large wavelength.Cooperative MIMO technology allows a wireless network to coordinate among distributed antennas and achieve considerable performance gains similar to those provided by conventional MIMO systems.The distributed underwater nodes in the form of clusters can form cooperative MIMO[7,8].While the low propagation speed of traditional acoustic communication cannot realize accurate synchronization among sensor nodes.Besides,the narrow bandwidth of the acoustic channel further enlarges the synchronization time and errors.To address the above problem,MI communication is used for intra-cluster communications and synchronization of the nodes’ clock,i.e.“MI-assisted”.MI communication is not affected by multipath fading,channel fading,and with extremely high-speed signal propagation[9].Hence when MI is used for communication and synchronization between nodes within a cooperative MIMO,the communication and synchronization performance can be effectively improved.
Some literature has demonstrated the performance of underwater MI-assisted acoustic cooperative MIMO WSNs in throughput,signal-to-noise ratio (SNR),and connectivity [5,10].However,it has been found to be too ineffective under the underwater environment to be used commercially,since the energy utilization of nodes is not considered.Due to the irreplaceability of the limited capacity batteries for underwater equipment,energy utilization of nodes is one of the key issues in these networks to prevent the creation of energy holes,and it relates to the network lifetime.Existing underwater data collection and their corresponding energy-efficient technologies cannot be replicated in this network due to the novel heterogeneous network architecture.Thus an energy-efficient data collection over underwater MI-assisted acoustic cooperative MIMO WSNs is needed.
In this paper,we design an energy-efficient data collection over underwater MI-assisted acoustic cooperative MIMO WSNs.And the objective is to guarantee coverage as well as reduce energy consumption,so that prolong the network lifetime.Due to the new heterogeneous network architecture,the energy consumption of nodes is dependent on the cooperative MIMO size,MI and acoustic communication transmission power,and the selection of master node.Therefore the formation of optimal cooperative MIMO needs to be reconsidered.Besides,the establishment of some relay links based on a matching algorithm will make the data collection more energy efficient.we adopt the two-hop relay mode to balance the efficiency and reliability.The specific contributions of this paper are as follows:
· We present an energy-efficient data collection for underwater MI-assisted acoustic cooperative MIMO WSNs,including the formation of cooperative MIMO and relay link establishment.
· Considering the location of the cluster and its expected transmission range,we proposed a expected cooperative MIMO size (ECMS) algorithm to optimize expected cooperative MIMO size by adjusting the transmission power of MI and acoustic communication.
· The cooperative MIMO is formed by cooperative MIMO formation (CMF) algorithm,which considering the selection of MN and expected cooperative MIMO size.
· The energy efficiency stable matching (EESM)based relay selection(EESMRS)algorithm is proposed to select appropriate relays to establish links to ensure network coverage,and extend the network lifetime.
The rest of the paper is organized as follows.Section II introduces the related works.The scenario is set and the relevant model is given in Section III.Section IV and section V describe our cooperative MIMO formation and relay link establish scheme,the former is based on the CMF algorithm,the latter gives an EESMRS algorithm that can achieve a trade-off between energy saving and coverage requirements of the networks.The simulation results and performance analysis are discussed in Section VI.Finally,Section VII concludes the paper.
II.RELATED WORKS
Among the three primary energy consumptions of sensor nodes in WSNs,wireless communication energy has been verified to be dominant in many experimental measurements compared to computation en-ergy and sensing energy [11,12].There are three primary methods to reduce the energy consumption of communication in the literature: (i) topology control [13],(ii) energy-efficient routing protocols [14],and (iii) power control protocols [15].In addition,clustering attempts to balance the energy consumption among sensor nodes by iteratively selecting cluster heads[16,17].
Especially in UWSN,some data collection and their corresponding energy-efficient technologies are proposed by considering the complex underwater environment and the energy-constrained characteristic of acoustic communication.The underwater data collection can be divided into three aspects: 1) Sensor network;2) Autonomous underwater vehicle (AUV);3)AUV-assisted sensor network.[18] reviewed literature on the topic of underwater data collection,and the comparison is presented in Table 1.[19]reviewed current techniques and describe potential future research directions for energy conservation in underwater sensor networks.To overcome the communication void regions,[20]provides a novel depth adjustment based topology control mechanism used to move void nodes to new depths.For the UWSNs with AUV,an energyefficient data collection was proposed for UCPS over AUV assisted underwater acoustic sensor network in[18].[21]provided an energy-efficient data collection to maximize the energy consumption utility.However,these techniques can not directly be applied to the underwater MI-assisted acoustic cooperative MIMO WSNs due to the novel heterogeneous network architecture.Consider the novel heterogeneous network architecture of the networks,the underwater sensor nodes within a cluster can adjust their transmission range and connect with the surface base station (BS)by adaptively adjust cooperative MIMO’s size.The cooperative MIMO with the optimal size can not only ensure the connection with surface BS,but also save the energy consumption of underwater nodes by sleeping unnecessary nodes.
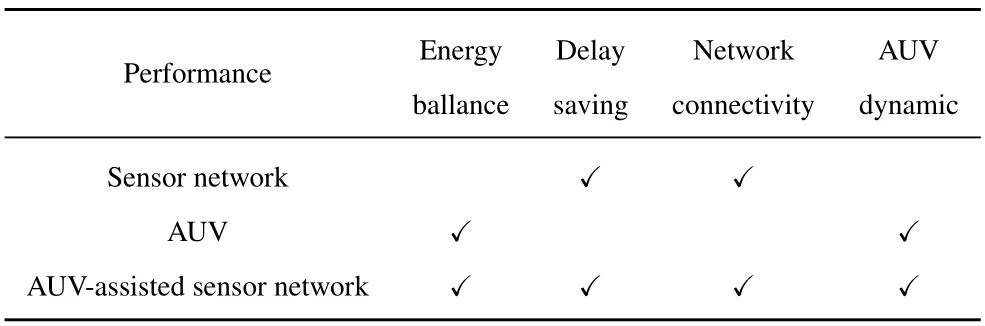
Table 1. Comparison of data collection.
However,there are still some problems in the process of cooperative MIMO formation when the network adaptively adjusting the size of it.Due to power constraints,some clusters still cannot connect with BS,or they consume huge energy to communicate with BS directly.In this regard,relay technique can be resorted to further improve the system performance by establishing the relay link for the two type clusters.As an effective mathematical tool dealing with user pairing and scheduling problems,matching can provide rich decentralized methods for designing an energy-aware and scalable network.The classic Gale-Shapley (GS) algorithm can get stable matching,in which any user cannot unilaterally benefit by deviating to another choice [22].However,the GS algorithm is a two-side matching in relay selection that the source and relay are completely distinct and ignores the trade-off between energy saving and connectivity requirements.[23] introduces a socially stable matching to socially-aware D2D communication scenarios,in which the physical and social factors have been taken into account.While the two constraints are for the same source and relay sets,and the algorithm does not apply to the different types of cluster matching in this network.
III.PRELIMINARIES
3.1 Scenario and Notation
We consider an underwater MI-assisted acoustic cooperative MIMO network with several sensor nodes and surface BS as illustrated in Figure 1.Without loss of generality,the network is supposed to be deployed in the underwater 3D environment R3.The surface BS is deployed on the surface,and underwater sensor nodes are managed as clusters.Some nodes within a cluster constitute a cooperative MIMO to transmit signal.The cooperative MIMO in another cluster or the surface BS with array antenna receives the signal as the output of cooperative MIMO.The clusters{Ci,i=1,2···}are distributed inside the space R3according to a homogeneous Poisson point process with intensityλc.The nodes{Nj,j=1,2···}within a cluster are distributed according to another homogeneous Poisson point process of intensityλn.Each node is equipped with MI communication module and acoustic communication module,and has the opportunity to be selected as MN in their cluster.Meanwhile,each cluster can select another cluster as a relay to establish links with surface BS ascluster 3in Figure 1,depending on its requirements of connectivity or energy-efficiency.This paper is based on the following assumptions
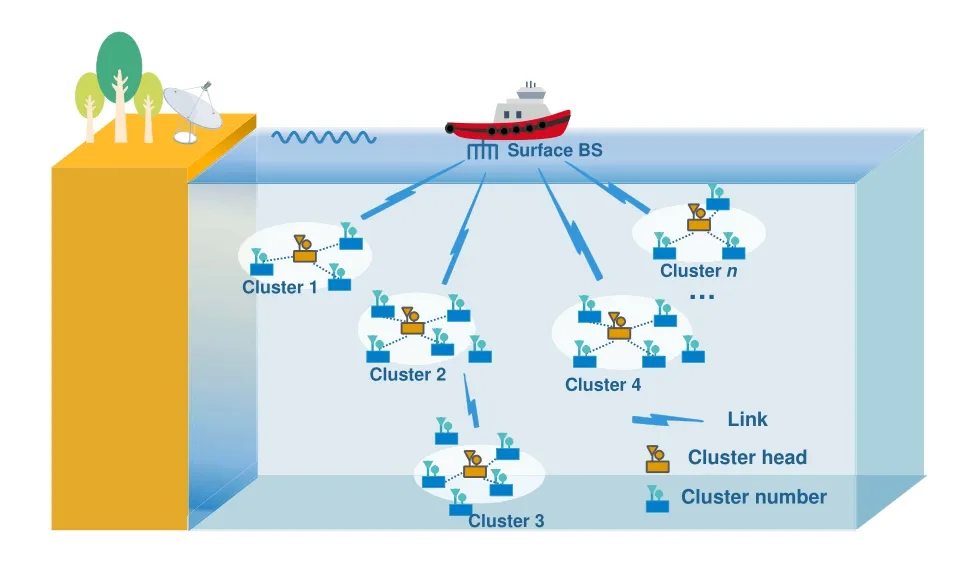
Figure 1. Underwater MI-assisted acoustic cooperative MIMO WSNs.
· Underwater environment is basically stable.Sensors nodes and surface BS are not affected by water ow.
· The location of the sensor nodes is given.
· The nodes do not move in a certain period of time,the end-to-end communication path between nodes is not affected,which can’t lead to the formation of underwater delay tolerant networks.
3.2 Underwater MI-Assisted Acoustic Cooperative MIMO WSNs Architecture
In underwater MI-assisted acoustic cooperative MIMO network architecture,some sensor nodes within a cluster constitute cooperative MIMO to achieve long-distance and high-throughput communication,that is,it is a two-layer network.The feature of the network is that communication within clusters are using MI,and communication between the clusters and surface BS is using acoustic.Specifically,MI communication is used to construct the transmission signal incooperative MIMO formation,synchronization,aggregationandbroadcastperiod,acoustic is used incommunicationperiod in Figure 2.Note that each node participating in cooperative MIMO in the cluster both communicate with surface BS or other clusters,and they share the same data and clock.Therefore,a node is selected as a MN to collect the monitoring data from other nodes and to coordinate the intra-cluster synchronization within a cooperative MIMO,and other nodes in MN’s transmission range as SNs.SNs transmit the monitoring data through a direct link to the MN within the cooperative MIMO.
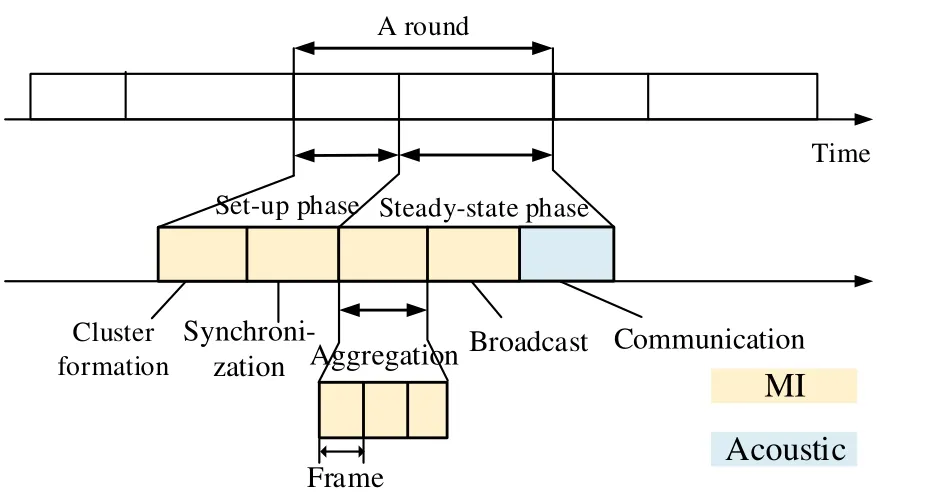
Figure 2. Time line showing the transmission scheme of underwater MI-assisted acoustic cooperative MIMO WSNs.
As shown in Figure 2,the operation of the transmission scheme is divided intorounds.Each round begins with a set-up phase when the cooperative MIMO is organized,followed by a steadystate phase when data are transferred from the nodes to the MN and on to the surface BS [24].The MN is selected and adaptive cooperative MIMO is formed by CMF algorithm in Section IV during theCooperativeMIMOformationperiod,and Timingsync Protocol for Sensor Networks (TPSN) is adopted to adjust the clocks of SNs to that of MN,which operated in theSynchronizationperiod[25].In the period ofAggregation,we adopt a timedivision multiple access (TDMA) mechanism and all SNs send monitoring data to MN during each frame in turns.After MN gathers all SNs’ information,MN broadcasts in the cooperative MIMO by means of MI communication duringBroadcastperiod.Finally,the monitoring information converges to the surface BS in the form of acoustic cooperative MIMO inCommunicationperiod.Note that during theCooperativeMIMOformationperiod,the cooperative MIMO is formed by CMF algorithm in Section IV,which considers the MN’s selection and the expected size.The method of cooperative MIMO formation not only ensures the accuracy of clock synchronization of nodes within a cooperative MIMO but also ensures the nodes with more residual energy can be elected as MN first and the MN is located in the center of the cooperative MIMO,resulting in the shortest communication distance.Hence,it can balance the total energy consumption and network lifetime.
Considering the limitation of power and excessive energy consumption,when cooperative MIMO within the cluster directly communicates to surface BS,the establishment of links may fail due to the longdistance or bad link condition.In this regard,the relay technique is resorted to further improve system performance by extending the cooperative MIMO’s communication range.The cooperative MIMO can connect with surface BS directly or through another cooperative MIMO forward as a relay.
3.3 Channel Characteristics
There are two types of channels in the underwater MIassisted acoustic cooperative MIMO WSNs,namely the underwater acoustic channel and MI channel[10].
In underwater MI-assisted acoustic cooperative MIMO WSNs,acoustic communication is adopted for communication between clusters in terms of cooperative MIMO.We consider Thorp’s underwater acoustic channel model[26].
The transmission power model is formulated as
whereis received power,is the transmitted power in acoustic communications,andA(d,f)is the channel attenuation depending on the distancedand the frequencyf(kHz)
whereA0is the normalizing constant andθis the spreading factor.The spreading factor has a value between 1 and 2 depending on the depth.a(f) is the absorption coefficient and is expressed in decibels per kilometer
MI is adopted for information aggregation and synchronization within a cluster in underwater MIassisted acoustic cooperative MIMO WSNs.As a near-field communication technique,the transmission power model is formulated as[27]
whereis received power,is the transmitted power in the MI communications,andris the distance of the MN and one SN;ρ=whereQT=ωLT/RLTandQR=ωLR/RLRare quality factors of transmitter and receiver respectively,LTandLRare the inductances of the transmitting and receiving coils,RLTandRLRare the transmitting and receiving coil resistances,ηT=RS/(RS+RLT)andηR=RL/(RL+RLR) are efficiencies of the transmitter and receiver coils,RSandRLare source and load resistances,rTandrRare the size of the transmitting and the receiving coil,ωis resonant frequency,andG=e-r/δis a parameter related to the channel state,δis conductivity.The conductivities of seawater,fresh water and dry oil are 4.5,0.07 and 0.0048 S/m,respectively.
According to [28],after pre-compensation phases are added to the sensors to eliminate the time delays,the received signal at the surface BS can be expressed as
Thus,the power of received signal can be expressed by:
3.4 Evaluation Mechanism
The evaluation mechanism is key to measure the performance of data collection.This paper evaluates the performance of data collection by using network coverage and nodes’energy consumption.
We assumed that the distance between clusterCiand surface BS isxi,and the maximum transmission range ofCiisRmax,i.Then the connectivity probability ofCiis
whereRmax,iis can obtained by
wherePnis the power of environment noise,andSNRthindicates the minimum SNR that the surface BS is able to receive and recover the transmitted signal from the cluster.
Then coverage of the network can be formulated as
whereNis the number of cluster in R3.
IV.THE COOPERATIVE MIMO FORMATION
Considering the architecture of the underwater MIassisted acoustic cooperative MIMO network,it is very important to select appropriate nodes to cooperatively transmit in the form of cooperative MIMO.Cooperative MIMO size and MN selection are two important factors that can reduce the energy consumption during the communication process.Firstly,the expected cooperative MIMO size algorithm is given to get the optimal cooperative MIMO size theoretically,which minimize MN’s energy consumption considering the expected transmission range of the cluster.Then,the cooperative MIMO is established by selecting MN according to CMF algorithm and selecting nodes within the expected cooperative MIMO size of MN.
4.1 Expected Cooperative MIMO Size Algorithm
Here we first give the ECMS algorithm from the analysis of node’s energy consumption.
Generally,energy consumption for transmission can be defined as:
wheretis the time of transmission,Pelecis the power consumed by the transmitter and receiver circuits,andPtis transmission power.
From the above transmission scheme,MNs consume the most energy in a round.To balance node’s energy consumption and extend the network lifetime,it is necessary to minimize the energy consumption of MNs.In each loop,MN’s energy consumption includes three parts: the energy consumed by collecting information of SNsE1,the energy consumed when broadcasting within a clusterE2,and the energy consumed when transmission with surface BSE3.
Assumed that there arenSNs participating in cooperative MIMO,then
wheret1,jis the time that each SNjcommunication with MN and it can be calculated as
whereD1is the packet size that SNjtransmit to MN,v1,jis data rate,BMIis MI bandwidth,andσ2is noise power.
The MN broadcasts information within a cooperative MIMO by MI communication and the energy consumedE2is
whereis the transmission power of MI communication and the transmission timet2is
whereD2is the packet size of the monitoring data which aggregated by MN,andris the size of the cooperative MIMO.
The nodes within the cooperative MIMO communicate with surface BS by acoustic.The energy consumed of MNE3and the transmission timet3are
In order to ensure that MN and SNs within a cooperative MIMO are connected,we have:
whereSNRthis theSNRthreshold.
Meanwhile,the nodes within a cluster are distributed according to homogeneous Poisson point process of intensityλn.In the same way,to ensure that cooperative MIMO can achieve the expected transmission range,one has:
wherenis the number of nodes participating in cooperative MIMO anddis the expected transmission range.
From the above analysis,we can formulate the expectd energy consumption minimization problem of MN as follows:
whereC1 makes sure that SNs can connect with the MN andC2 makes sure that the cluster can achieve the expected transmission range.It can be seen that the energy consumption of MN is mainly affected by the size of the cooperative MIMO and the transmission power of MI and acoustic communication.Therefore,the following ECMS algorithm is proposed.
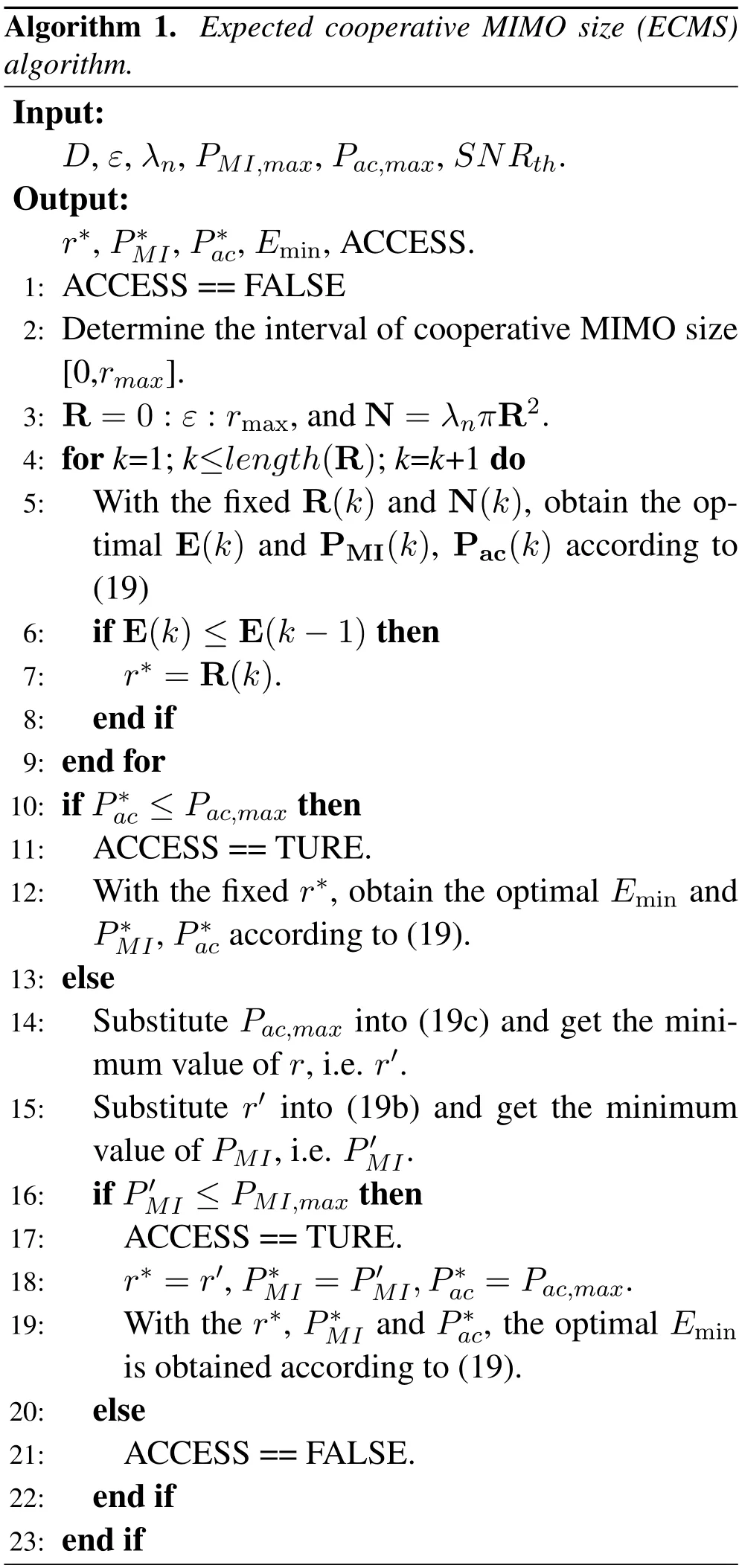
From the above analysis,the expected cooperative MIMO size of the proposed scheme can be obtained by solving(19).We give an algorithm that adjusts cooperative MIMO size,and describe it in detail in Algorithm 1.The algorithm starts with the input of expected transmission rangeD,step-sizeε,the density of nodesλn,the maximum transmission power of MI and acoustic communicationPMI,max,Pac,max,and SNR thresholdSNRth.By substitutingPMI,maxinto(19b),the maximum transmission range of MI can be obtained.The interval of cooperative MIMO size is[0,rmax],andrmaxis determined by the smaller of cluster radius and maximum transmission range of MI(line 1-2).Then,the cooperative MIMO size and transmitting power are obtained through numerical search and the expected transmission range is considered as an important index in the constraint condition.According to [15],the energy consumed by communication increases with the growth of transmitting power.In each loop,the size of cooperative MIMO R(k) is determined.Based on constraints(19b)and(19c),the minimum optimization objective can be obtained whenandare set to the boundary values.Then,ther*is selected from numerical searching which results in a step-size-based solution forr(Line 3-9).Meanwhile,the maximum transmission power of MI and acoustic communication limit whether the cluster can achieve the expected transmission range.When outputACCESSisTURE,it can be achieved,otherwise it cannot(Line 10-23).
Due to the limitation of the step size ofr,the solution of the optimization objective is suboptimal instead of optimal.And with the smaller the step size,the smaller the gap between the suboptimal solution obtained by numerical searching and the optimal solution.But in fact,the number of nodes that form the cooperative MIMO must be an integer,and is related to the distribution of nodes.The cooperative MIMO size obtained by Algorithm 1 as a theoretical reference,and the cooperative MIMO is ultimately formed by Algorithm 2.Therefore,the suboptimal solution obtained by Algorithm 1 is acceptable.In each loop,R(k) that makes E(k) smaller is assigned tor*.After the numerical search,E(k) converges to a minimum.The Algorithm 1 requires a complexity ofO(n)to find the suboptimal cooperative MIMO to minimize energy consumption while guaranteeing the expected transmission distance and SNR threshold.
4.2 The Cooperative MIMO Formation Based on Energy
Generally,the clustering technique is often used for designing an energy-aware and scalable UWSNs.Similar to[29],a thresholdT(n)is adopted in this networks,which can make the node randomly selected to be a MN.
wherep=1/nis the probability of node’s optimum MN selection,ris the current round,Gis the set of nodes which have never been the MN in the last 1/pround,Eresidualis the residul energy of node,E0is the initial energy of node.
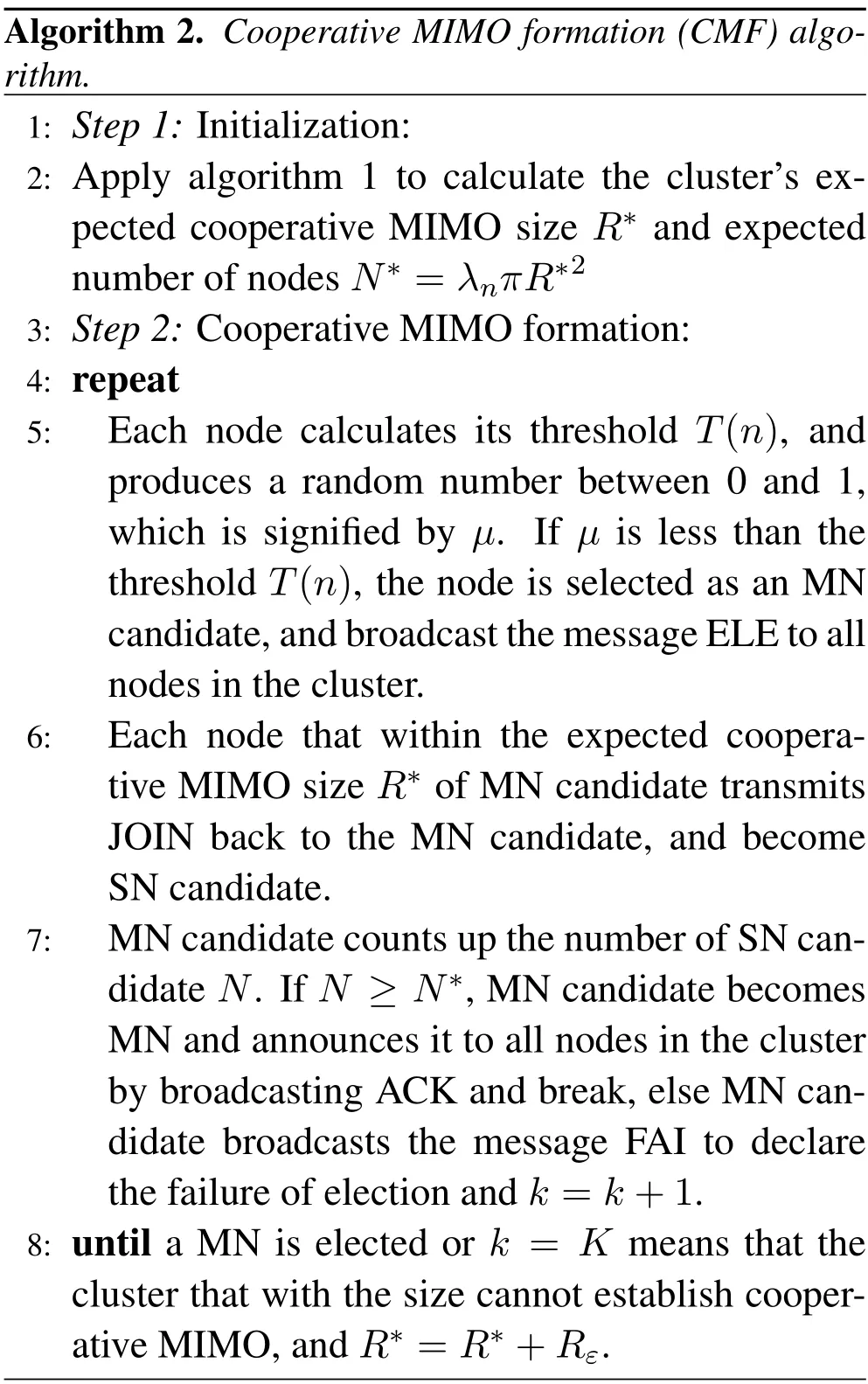
While a cluster of nodes also needs to form a cooperative MIMO for long-distance communication in underwater MI-assisted acoustic cooperative MIMO WSNs.We presented a distributed scheduling to form cooperative MIMO by considering both networks’connectivity and nodes’ energy balance.According to the expected cooperative MIMO size and thresholdT(n),we form the cooperative MIMO by CMF algorithm,which is described in detail in Algorithm 2.We can find that the node with high residual energy has a large probability to broadcast the election statement (ELE) so that they have a large probability to be selected as MN.It can balance energy consumption among nodes and prolong the network lifetime.The nodes within the expected cooperative MIMO size reply a join statement (JOIN) to MN candidates and become SN candidates.MN candidate determines whether a communication link can be established according to the number of SN candidates and judges whether the election is successful.Once the MN candidate announces become MN and broadcasting acknowledgment (ACK) to all nodes in the cluster,that means the cooperative MIMO is established.If the MN candidate fails to become MN,it will broadcast a failure statement (FAI) and the next election begin.If the number of cycles exceeds the presetK,the expected cooperative MIMO size increases an incrementRε,and the threshold is recalculated for another circle.
V.RELAY LINK ESTABLISHMENT
Firstly,considering the limitation of power,some clusters cannot connect with surface BS even transmit their monitoring data with the maximum transmitting power,and they must build links with surface BS through other clusters serve as a relay.We defined them as the source,and the rest of the cluster that can connect with surface BS directly as relay.The source and relay are given byS={si,i=1...},andR={rj,j=1...},respectively.At the same time,we consider that some clusters in R3consume too much energy to communicate directly with BS,and the energy consumption of these clusters can reduced by selecting another cluster in their neighbors as a relay.Similar to the assumption in[30],we consider the single relay selection,i.e.,one source can select at most one relay,to avoid the complexity of synchronization and signaling overhead of multiple relay selection.An example of underwater MI-assisted acoustic cooperative MIMO WSNs is shown in Figure 3.There are seven clusters in R3.As mentioned above,S={C1,C5,C6}can’t connect with surface BS directly due to the distance between them and surface BS exceed their maximum transmission range.WhileScan selects other clusters inR={C2,C3,C4,C7}as a relay to connect surface BS likelink 1in Figure 3.Meanwhile,the energy consumed byC3to connect with surface BS throughC4as a relay is less than that of direct communication,solink 2is established.
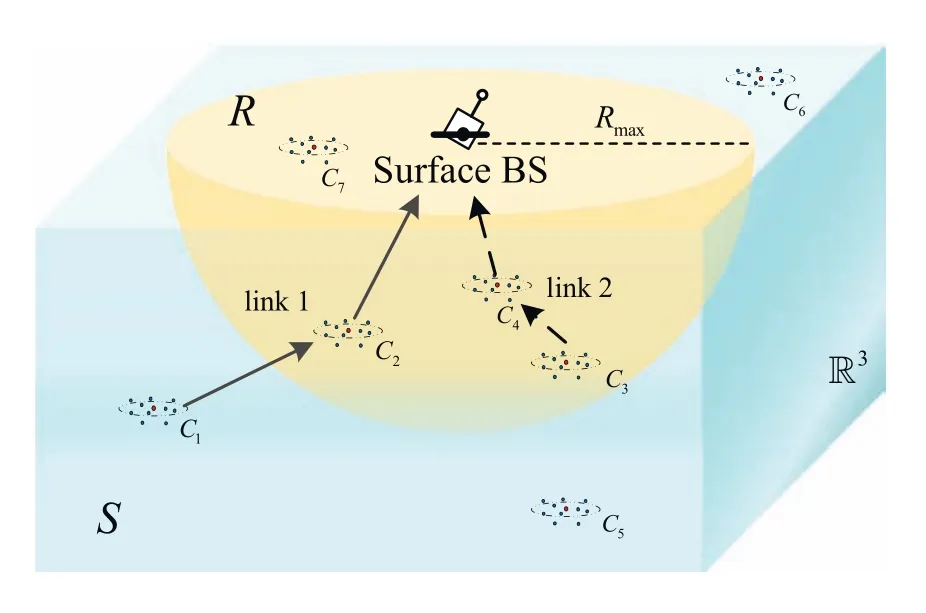
Figure 3. An example of underwater MI-assisted acoustic cooperative MIMO WSNs.
Based on the discussion above,there are two types of links that a cluster needs another cluster as a relay,i.e.(i) the cluster that cannot connect directly with surface BS without a relay link and (ii) the relay link can reduce sources’energy consumption by a relay link.The (i) can be formulated as the two-side matching since the source and relay are distinguished by whether they can communicate directly with BS.Classic Gale-Sharpley(GS)algorithm can be adapted to obtain a stable relay selection for the problem,and it is a completely distributed algorithm.For (ii),the cluster inRdetermines whether to select a relay to establish a link based on the information exchange with its neighbor clusters.The relay matching is taken into account if the cluster can benefit from the relay link that with its neighbor cluster.However,if the relay selection to save energy is described as two-side matching,some clusters will have an empty relay candidate set,which degrades the system’s lifetime.It seems that the better choice is to achieve a trade-off between these two matching requirements.Therefore,we first propose an Energy Efficiency Stable Matching (EESM)algorithm and EESM based relay selection (SSMRS)algorithm.
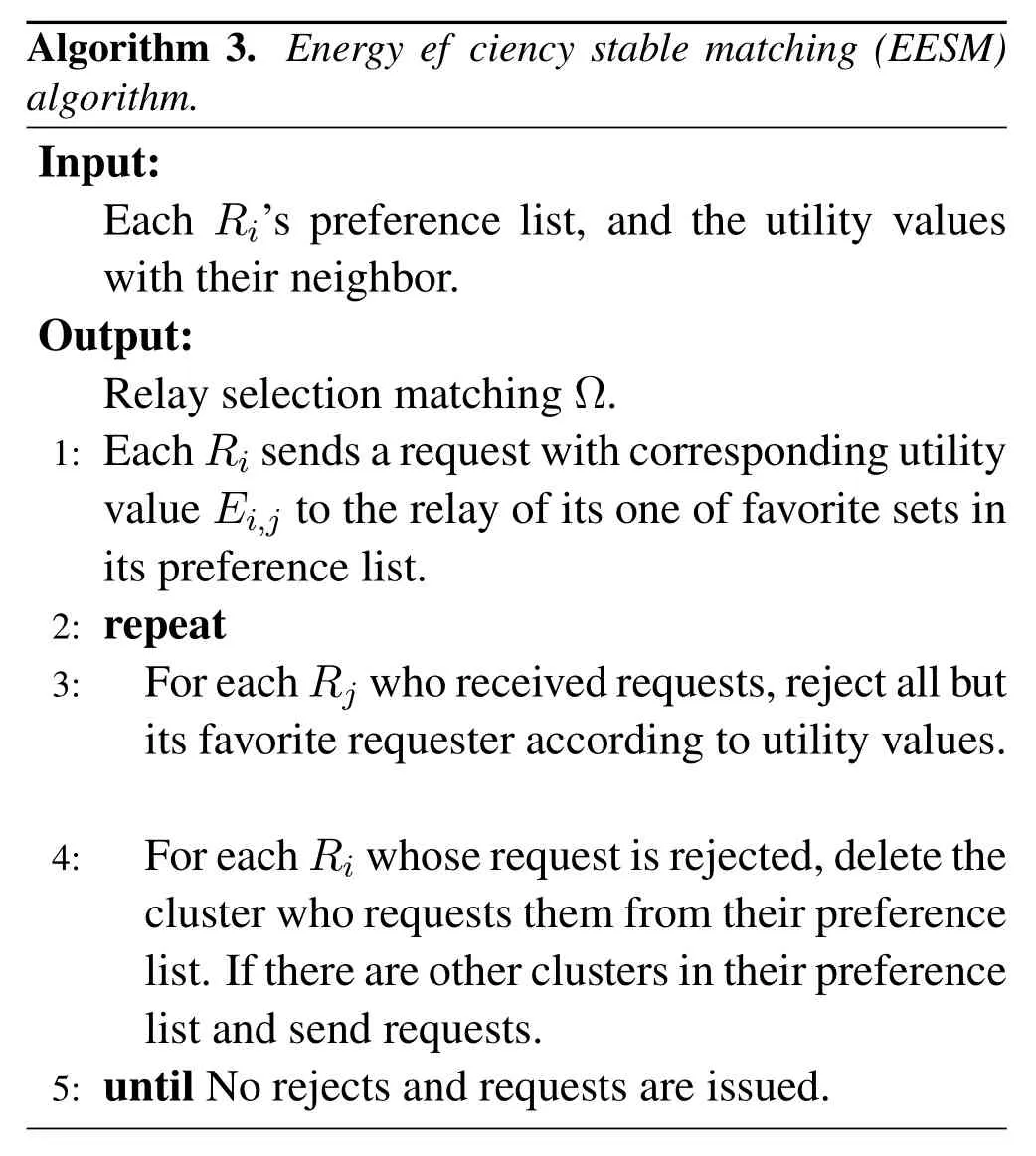
Firstly,we define the utility valuesEi,jas the energy saving that clusterCjas the relay ofCi,and get theCi’s preference list by sorting allEi,jwith its neighbor clusters in descending order.If theCicannot save energy by establishing a relay link withCi,Ei,j=0.Note that the preference list is for matching objects,that is,R’s preference list is for anotherRin its neighboring cluster,andS’s is theRin its neighboring cluster.Then,we propose an Energy Efficiency Stable Matching(EESM)Algorithm to reduce MN’energy consumption by establishing a relay link inRas a submodule,and the described in detail in Algorithm 3.
The main idea of our proposed EESMRS is that we pre-matchingRto modified the matching relation ofSandR.There are two steps in EESMRS,the first one is the Initialization phase and another is the Link Establishment phase as described in Algorithm 4.In the Initialization phase,the cluster determines whether it is a source or a relay based on its location,and every cluster broadcasts a packet to inform its location and properties to all its neighbors.Section IV.A shows that MN can determine the expected cooperative MIMO size and calculate the communication energy consumption according to the required transmission distance.Hence,clusters can calculate the utility functionEi,jafter the Initialization phase as the basis for determining the initial preference list,which is got by sortingEi,jin descending order.In the Link Establishment phase,apply Algorithm 3 to find prematching Ω0,and broadcast matching results to their neighbors.ThenSchecks its initial preference list,if there is a neighbor cluster in Ω0(s),ranks it in the preference list after all neighbor clusters.(If clusteriis matched as a source in matching Ω marked as Ω0(si),and clusteriis matched as a relay in matching Ω,marked as Ω0(ri)similarly.) Meanwhile,Rdetermines its favorite source sets by sorting the energy saving in descending order,i.e.thesithat can save the most energy by establishing relay link withrican get the highest rank inri’s favorite source set.Apply GS based on the modified preference list and favorite source set,output the corresponding stable matching Ω1.For relays inRΩ1(r),apply Algorithm 3 to find matching Ω2.Finally,the matching Ω=Ω1∪Ω2is the basis of link establishment.
VI.RESULTS AND DISCUSSIONS
To evaluate the performance of the energy-efficient data collection,we have performed it using MATLAB based on an underwater MI-assisted acoustic cooperative MIMO network.We evaluate our proposed data collection in a 3D environment R3and the length of the side is 40km,where the clusters{Ci,i=1,2···}are distributed according to a homogeneous Poisson point process of intensityλcand the nodes in a cluster according to another homogeneous Poisson point process of intensityλn.The simulation parameters are given in Table 2.We set the parameters based on the existing work[4],[5],and[10].
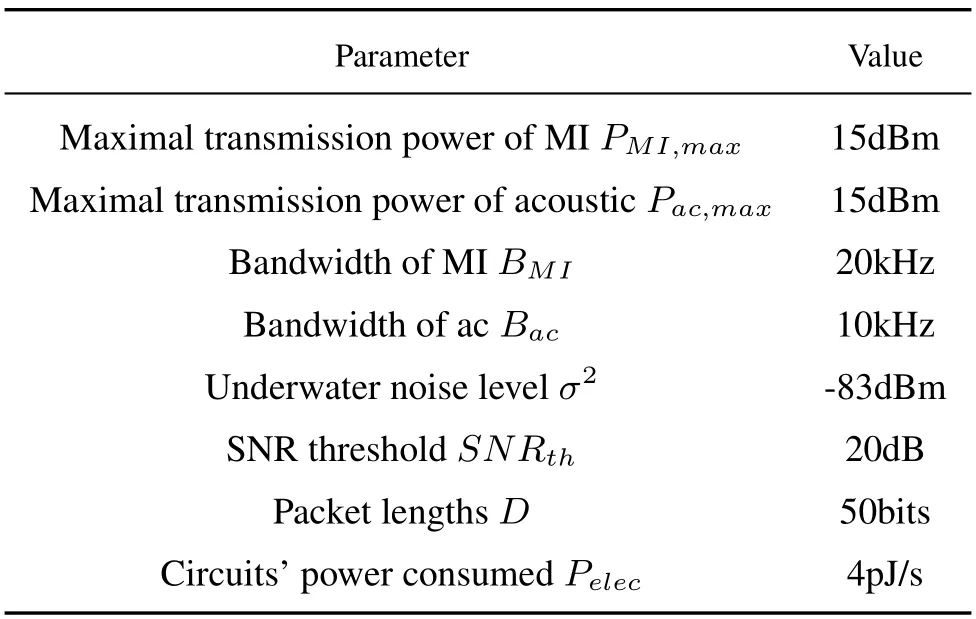
Table 2. Simulation parameters.
We compare the proposed ECMS algorithm with the fixed cluster radius algorithm with respect to the MN’s energy consumption in each loop as shown in Figure 4.The fixed cluster radius algorithm with predetermined power and the predetermined power of MI and acoustic are both 10dBm.It is observed from Figure 4 that the maximum transmission range of the cluster is fixed 17542 meters when the transmission power is predetermined,and the transmission range can reach 36700 meters when ECMS algorithm is adopted.In addition,the MN of the cluster using ECMS algorithm consumes less energy without a high requirement of transmission distance.If all the clusters of networks consume the same energy,the clusters of the network that closer to BS consumes more energy to forward as a relay,which accelerates the cluster’s death.When ECMS algorithm is adopted,the cluster who closer to the surface BS can significantly reduce energy consumption.Therefore,the ECMS algorithm can balance the network nodes’energy more efficiently.However,the cluster who can reach an extreme transmission range consume too much energy,which will extremely limit network’s performance.We need a relay selection scheme to solve it.
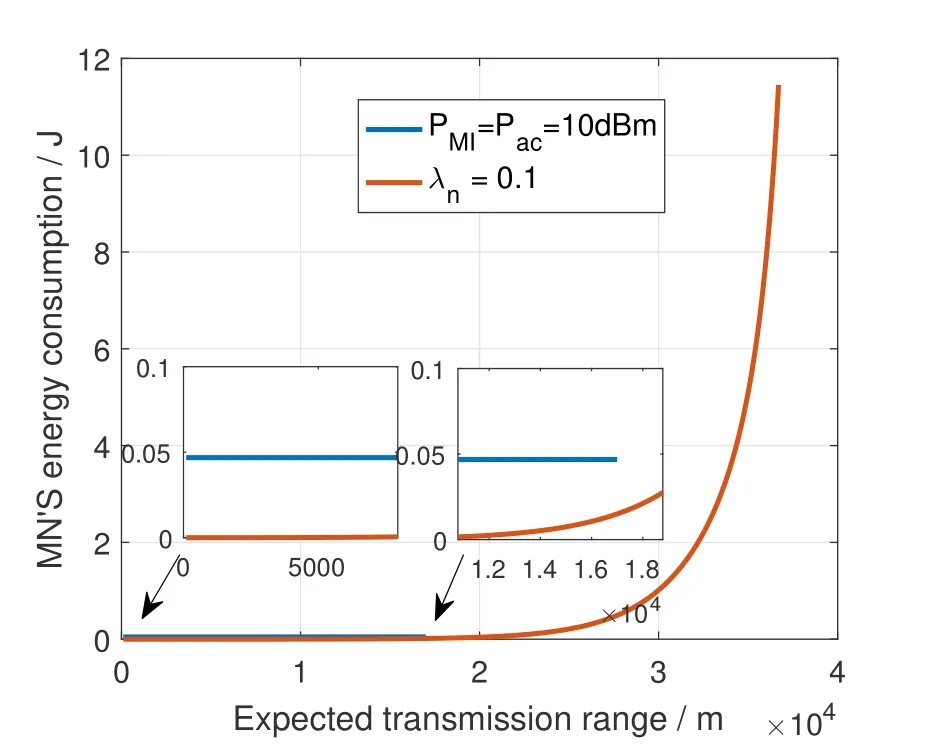
Figure 4. MN’s energy consumption in each loop with predetermined power and expected cooperative MIMO size.
The optimal transmission power of MI and acoustic under different system parameter settings are depicted in Figure 5.From the figure,it is seen that the optimal transmission power of MI and acoustic increase with the expected transmission range.This is because the larger distance requires more nodes to participate in the cooperative MIMO,so the transmission power of MI also increases.When the optimal transmission power given by the algorithm reaches the threshold,the cluster achieved the maximum transmission range.
Figure 6 shows how the number of survived nodes descends with the time in the simulation,in which the cluster is randomly generated.The cluster is 14239 meters away from surface BS and there are 28 nodes in the cluster.The initial node energy is 1J,and the node is considered dead when its energy is less than 0.2J.As shown in Figure 6,the network lifetime of underwater MI-assisted acoustic cooperative MIMO networks is far longer than that in a single node.That is because a single node guarantees the connectivity of cluster and BS at the cost of greater transmitting power,resulting in greater energy consumption in a round of communication.
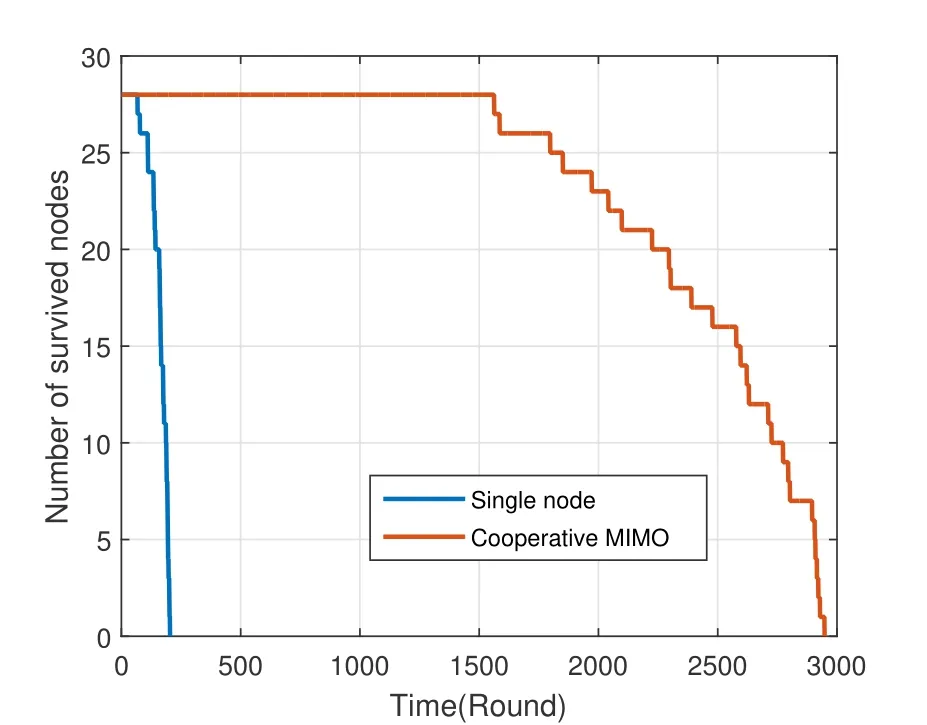
Figure 6. Number of survived nodes with the time.
The establishment of some relay links will make the data collection more energy efficient.However,there is a trade-off between energy-efficient and coverage of the networks in the selection of relay.As shown in Figure 7,three benchmarks are compared with EESMRS:1) no relay,2) only consider coverage by GS algorithm,and 3) only consider energy by EESM algorithm.We find that if we only consider the coverage of the networks,some clusters can not benefit from the establishment of the relay link and still consume too much energy on communications,which significantly degrades the networks’ lifetime.On the other hand,only considering the energy consumption for relay selection,the low coverage can not guarantee the detection function of the networks.Through comparison,EESMRS is verified to achieve a better trade-off among energy-efficient and coverage.Especially the networks have better energy-efficient perform with a slight decrease in coverage as shown in Figure 7.
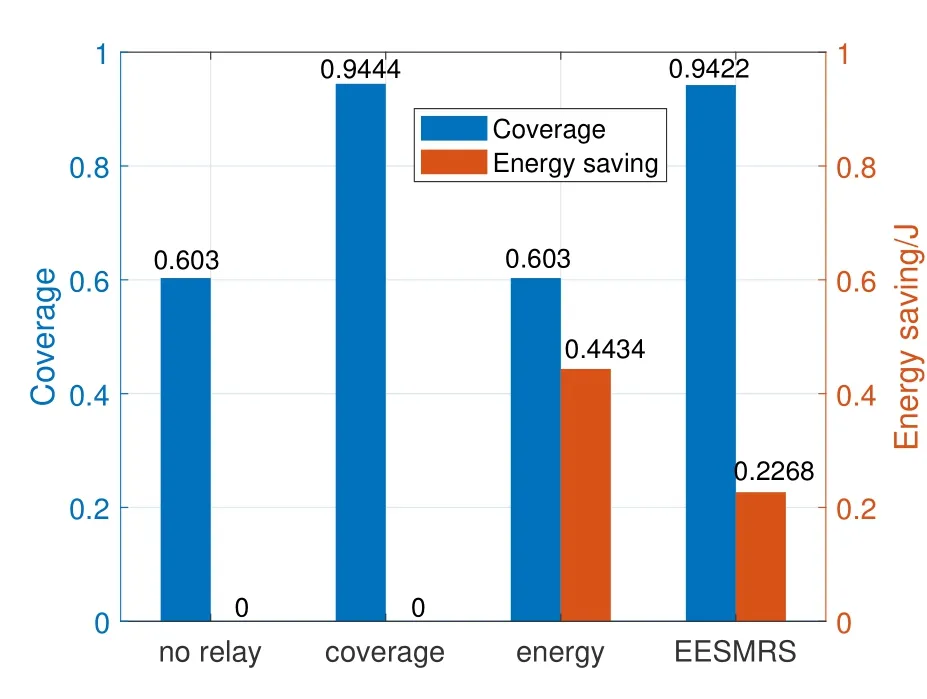
Figure 7. Trade-off between energy saving and coverage requirements of the networks.
To extand the coverage of the networks,and reduce energy consumption,we compare the proposed EESMRS.To verify the effectiveness of the algorithm,we compare it with three benchmarks algorithm: 1)One-hop network without relay,2) Random relay selection,and 3)GS algorithm.Note that random relay selection and GS algorithm divide clusters into source and relay with maximum transmission powerPac,maxis 10dBm for two-side matching and the clusters that can not directly connect with surface BS or can reduce the energy consumption of the relay link by selecting other clusters as a relay.Meanwhile,ECMS algorithm is used to determine the expected cooperative MIMO size and calculates the energy consumption of clusters in the three benchmarks algorithm.
Figure 8 shows the network coverage and the energy saving of these clusters under 500 monte carlo tests attained by EESMRS and other benchmarks.Note that the average of 10 test results is marked on the figure as a point due to a large number of tests.While Figure 8a is the total energy saving and Figure 8b is the average energy saving.Since the energy saving of the MN that the cluster selects relay is taken as the evaluation index,it is 0 for the one-hop network without relay,and the coverage of the network is mainly around 0.45-0.56.Figure 8a shows that the total energy saving of the GS algorithm and random relay selection scheme are higher than EESMRS.However,they have poorer performance than EESMRS both in average energy saving and coverage of the network in Figure 8b.This is because that GS algorithm and random relay selection scheme as two-side matching still have the same candidate set when there are two matching requirements.More relays are selected by the cluster with high energy consumption,which makes the coverage of GS algorithm decrease and the total energy saving increase,but it has no advantage or even slightly worse in terms of average energy saving.While EESMRS balances the trade-off between two matching requirements and degrades the system’s performance in two constrains.
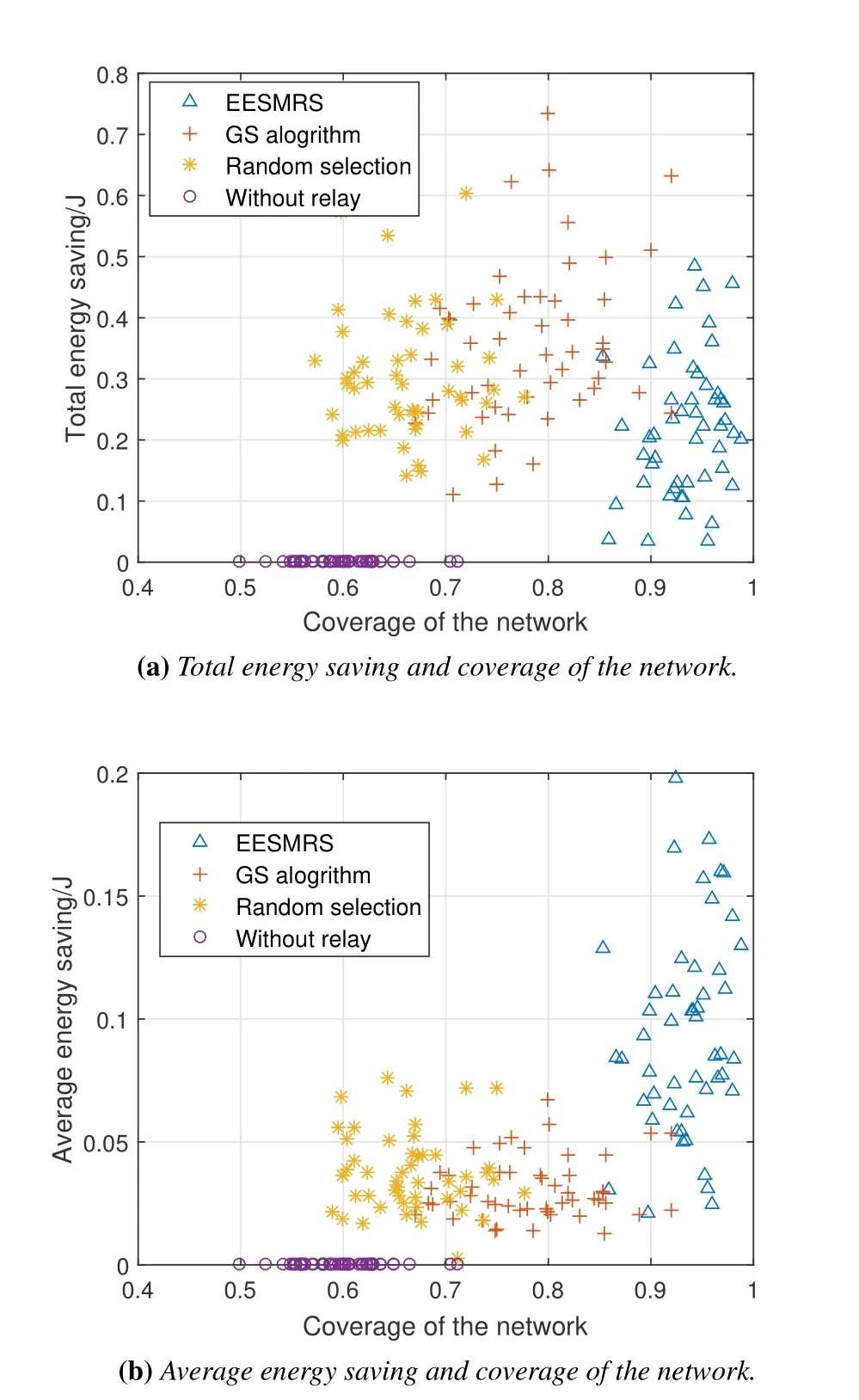
Figure 8. Energy saving and coverage of the network.
In Figure 9,we investigate how the node density effect coverage of the networks.In this simulation,the cluster density is set to 20/R3.We can see that both EESMRS and three benchmarks are affected by node density,because as the node density increases,the more nodes that can participate in cooperative MIMO withinPMI,max,and the greater transmission range of the cluster can realize.If the cluster’s transmission range is limited so that it can not directly transmit with surface BS or do not have a neighbor cluster that can serve as a relay,the cluster will be useless in the network for data collection.Meanwhile,EERSMS can significantly improve network coverage than three benchmarks by establishing a more reasonable relay selection scheme.
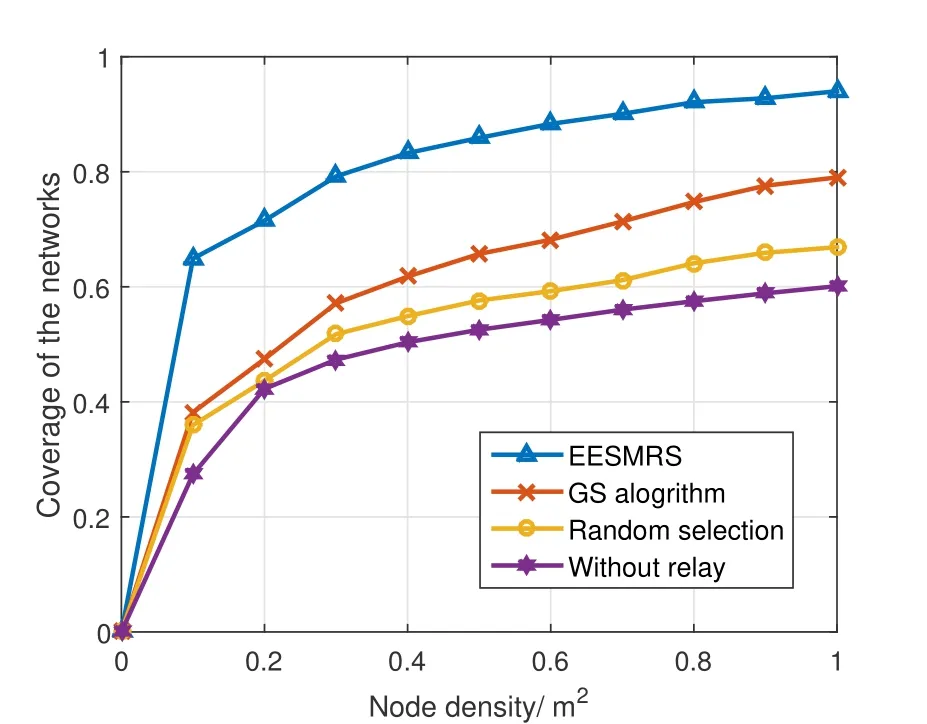
Figure 9. Coverage of the networks under different node density.
VII.CONCLUSION
This paper presents an energy-efficient data collection over underwater MI-assisted acoustic cooperative MIMO networks.We first give an energy-efficient cooperative MIMO formation algorithm that can ensure the expected transmission range.The proposed algorithm determines cooperative MIMO according to selecting the appropriate MN with the expected cooperative MIMO size.Moreover,an EESMRS algorithm is proposed to establish relay links for the clusters that can not directly connect with surface BS or consume too much energy.The simulation results show that the data collection can reduce energy consumption,prolong the lifetime of the network,and improve the coverage of the networks.
ACKNOWLEDGEMENT
This work was supported in part by the program for“Industrial IoT and Emergency Collaboration ”Innovative Research Team in CUMT(No.2020ZY002),in part by the Postgraduate Research&Practice Innovation Program of Jiangsu Province,2021WLKXJ054,and Postgraduate Research&Practice Innovation Program of China University of Mining and Technology,KYCX212242.
- China Communications的其它文章
- Secure and Trusted Interoperability Scheme of Heterogeneous Blockchains Platform in IoT Networks
- Intelligent Edge Network Routing Architecture with Blockchain for the IoT
- Privacy-Preserving Deep Learning on Big Data in Cloud
- PowerDetector: Malicious PowerShell Script Family Classification Based on Multi-Modal Semantic Fusion and Deep Learning
- Dynamic Task Offloading for Digital Twin-Empowered Mobile Edge Computing via Deep Reinforcement Learning
- Resource Trading and Miner Competition in Wireless Blockchain Networks with Edge Computing