
Recent Trends of In-Vehicle Time Sensitive Networking Technologies,Applications and Challenges
2023-11-18 08:12YanliXuJianShangHaoTang
China Communications 2023年11期
Yanli Xu,Jian Shang,Hao Tang
School of Information Engineering,Shanghai Maritime University,Shanghai 201306,China*The corresponding author,email: ylxu@shmtu.edu.cn
Abstract: With the vigorous development of automobile industry,in-vehicle network is also constantly upgraded to meet data transmission requirements of emerging applications.The main transmission requirements are low latency and certainty especially for autonomous driving.Time sensitive networking(TSN) based on Ethernet gives a possible solution to these requirements.Previous surveys usually investigated TSN from a general perspective,which referred to TSN of various application fields.In this paper,we focus on the application of TSN to the in-vehicle networks.For in-vehicle networks,we discuss all related TSN standards specified by IEEE 802.1 work group up to now.We further overview and analyze recent literature on various aspects of TSN for automotive applications,including synchronization,resource reservation,scheduling,certainty,software and hardware.Application scenarios of TSN for in-vehicle networks are analyzed one by one.Since TSN of in-vehicle network is still at a very initial stage,this paper also gives insights on open issues,future research directions and possible solutions.
Keywords: automobile industry;deterministic transmission;in-vehicle network;low latency;time sensitive networking(TSN)
I.INTRODUCTION
As the increase of user demands and the popularization of automatic data acquisition systems (ADAS),more and more applications emerge,which require invehicle networks to have characters of higher bandwidth and lower deployment cost,and to provide realtime and deterministic data transmission.The automotive Ethernet,which has received wide attention in recent years,can provide high-bandwidth and low-cost network services.However,the certainty and low latency of data transmission cannot be guaranteed.To enable automotive Ethernet to provide real-time and deterministic transmission,time-sensitive networking(TSN)technology is introduced to in-vehicle Ethernet communications.
TSN is a set of standards specified by institute of electrical and electronics engineers(IEEE)802.1 work group(WG),the predecessor of which is audio video bridging (AVB).AVB was firstly specified to support real-time transmission of audio/video(A/V)traffic,including synchronization specification,simple resource reservation and scheduling specifications.As more time-sensitive applications emerge,the use of AVB standards are not limited to A/V transmissions,but also to factory automation,automotive,fronthaul of mobile networks,etc.Thus,IEEE 802.1 WG renamed AVB as TSN to better reflect the expanded scope and issued more specifications to improve the real-time capability and reliability of Ethernet.Nowadays TSN provides various synchronization,resource reservation,queuing and scheduling,control and configuration,certainty,security and safety mechanisms,which is regarded as a prospective communication network technique for the intelligent vehicle applications due to the following three functionalities.Firstly,it supports real-time transmission for time-sensitive applications such as A/V transmission and radar sensing information.Secondly,it supports deterministic transmission for critical applications such as braking and direction control.Thirdly,it enables the coexistence of traditional best-effort(BE)traffic and these critical or time-sensitive traffic.
Some recent works have reviewed TSN from different perspectives.For example,Bello et al.surveyed TSN standards of industrial communication and automation in detail as well as their applicability to various industries in [1].Nasrallah et al.provided an overview of ultra-low latency communication techniques including TSN and fifth-generation(5G)techniques used in various applications [2].Particularly,some key specifications of TSN were highlighted and reviewed in [3,4].Cavalcanti et al.investigated the use of TSN on wireless systems for real-time industrial communication based on next-generation wireless standards such as wireless TSN techniques,IEEE 802.11AX and 5G in [5].In [6],authors surveyed modeling and analyses methodologies of AVB and TSN techniques from a general perspective.There were few works exclusively focusing on the TSN application to in-vehicle networks.Authors provided reviews of several TSN standards in light of possible future use cases based on in-vehicle Ethernet networks in[7].Samii et al.provided a review of several TSN standards in light of possible future use cases based on in-vehicle Ethernet networks in [8].A recent survey focused on hardware/software solutions for the intelligent driving systems in [9],which provided an overview of the current technological challenges in on-board and networked automotive systems including TSN.In a recent work[10],authors studied TSN of automotive embedded systems,which given related research on software architecture modeling,timing predictability verification,simulation,and hardware realization and deployment.In this paper,there were still some related design aspects and specifications of TSN are not referred to.
Generally speaking,TSN is an emerging network technology.For the in-vehicle scenario,there is no detailed introduction and survey on TSN research.Although some TSN protocols can be used for different application scenarios,some TSN specifications and designs are studied by considering a concrete scenario since there are some differences among different scenarios.For example,the main difference between industrial control networks and in-vehicular networks is that the former is more complicated in which topology is more dynamic,nodes is more,network is more heterogeneous,and performance requirements are higher for many applications.For avionic communication,related research and exclusive specifications are fewer.General protocols of TSN can meet the needs of avionic communication due to its simpler application scenarios,fixed topology and fewer executive components(communication nodes of Ethernet).In this paper,we present a comprehensive review on recent works,including specifications and study from industry and academic for in-vehicle networks.In addition,we analyze the potential use cases of TSN for automotive systems and reveal related open issues.
The rest paper is organized as follows.Section II introduces the background about vehicle electric/electronic-architecture (E/E-architecture),today’s in-vehicle networks and Ethernet.Section III summarizes TSN standards which can be used for invehicle networks and analyzes their characters.Section IV focuses on the TSN literature of in-vehicle networks.Section V analyzes application use cases of TSN for automobile industry.Then the open issues and challenges of TSN are analyzed in Section VI.Finally,Section VII concludes this paper.
II.BACKGROUND
In the remainder of this paper,all used abbreviations are given in Table 1.
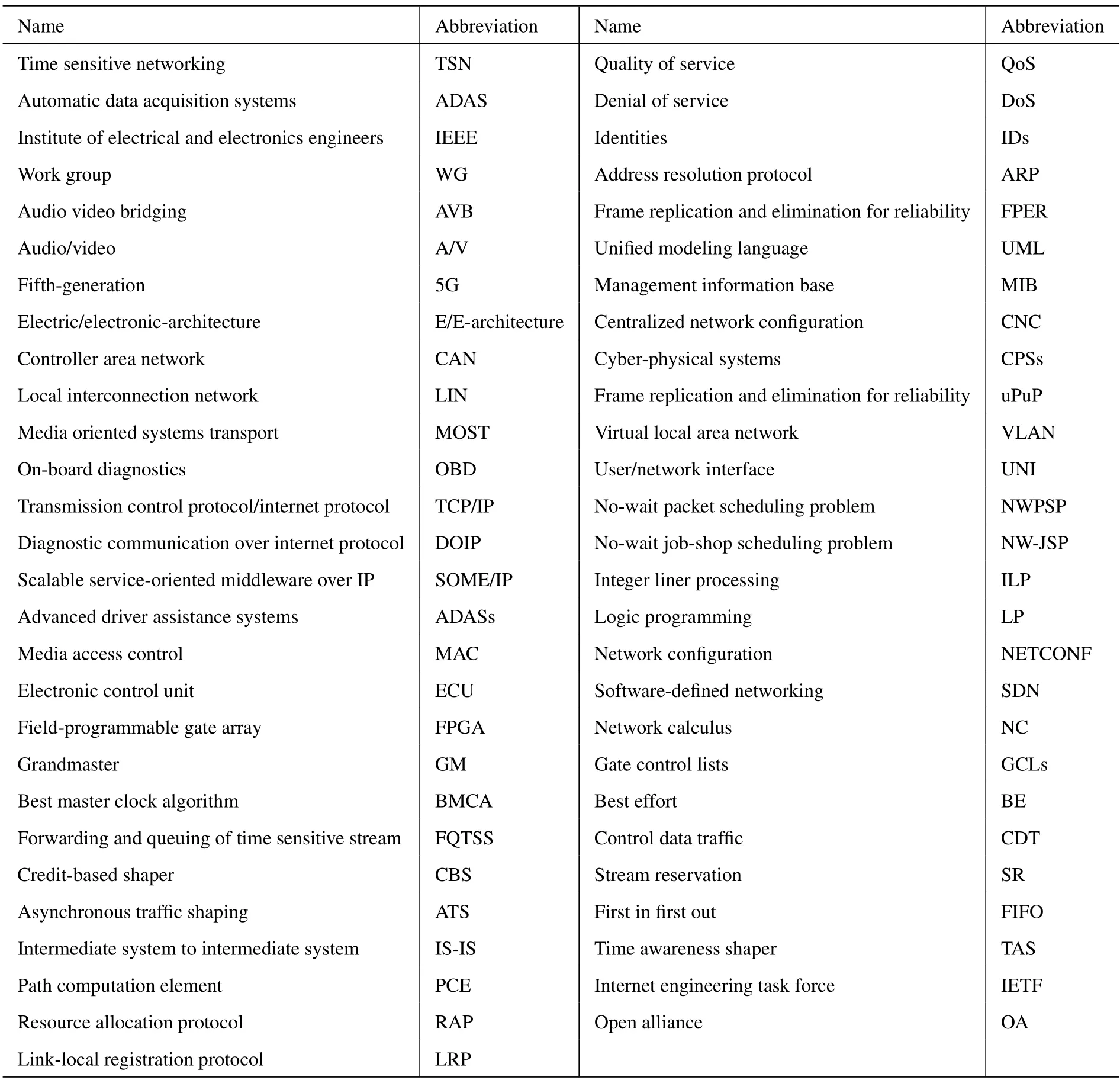
Table 1. Abbreviations of terminologies.
2.1 Today’s In-Vehicle Networks and Ethernet
In-vehicle functionalities such as electric sunroof,braking,direction control,video and media are inseparable from information transmission.To satisfy requirements of transmission,different communication techniques are provided for in-vehicle networks such as controller area network (CAN),local interconnection network(LIN),media oriented systems transport(MOST) and FlexRay.These techniques are usuallyco-existing in a car and play different roles.Each of them has advantages and disadvantages as shown in Table 2.
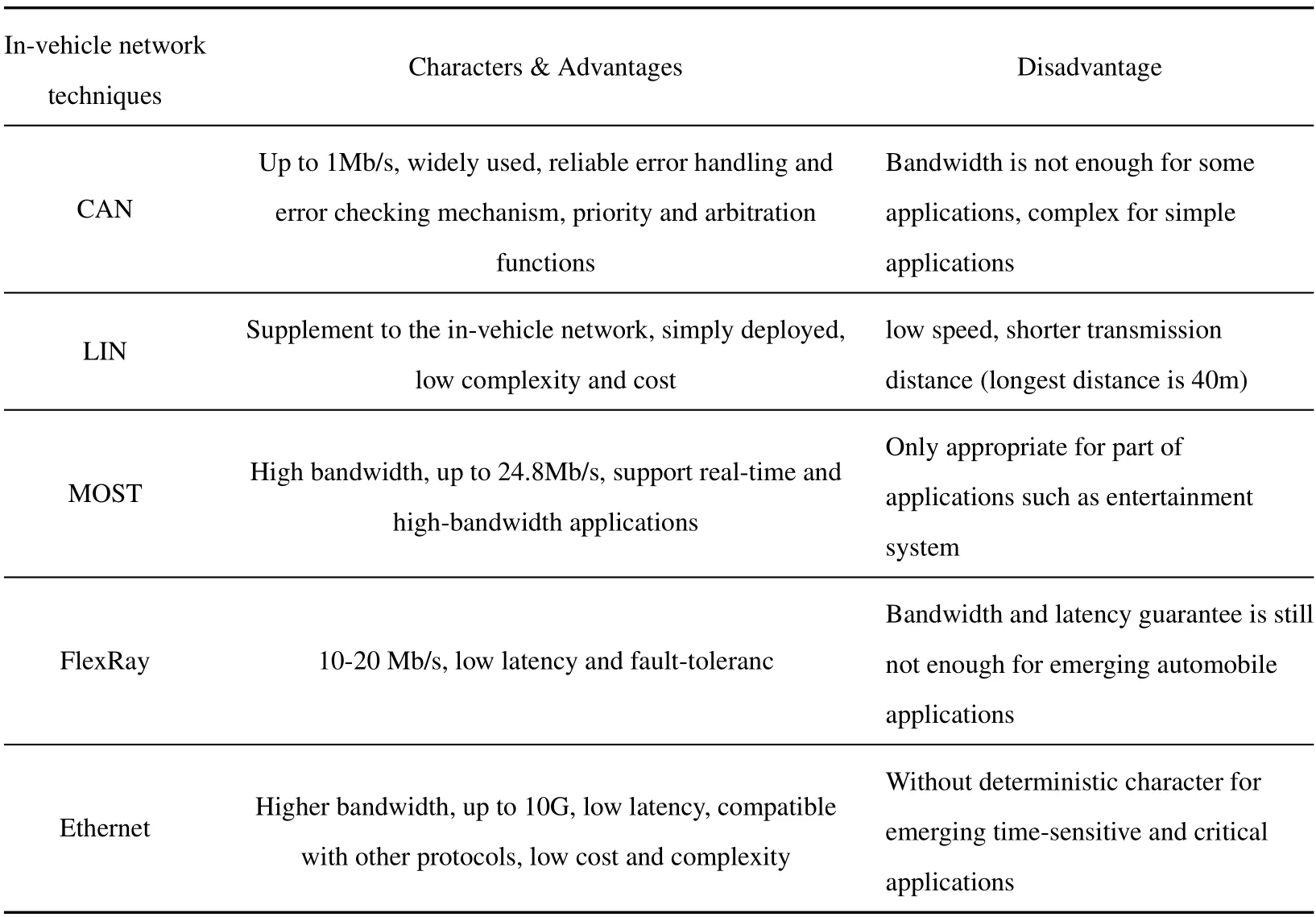
Table 2. Comparisons among in-vehicle network techniques.
Here we briefly introduce these techniques.CAN is one of the earliest and the predominant invehicle transmission technique,which is a bus system wherein all electronic control units(ECUs)share wires.Through determining the priorities of different traffics,it arbitrages which traffic should be transmitted first.The data rate can achieve 1 Mb/s.CAN is widely deployed in powertrain and body control domains,as well as being a standard interface to retrieve on-board diagnostics(OBD)data from vehicles[11].Some vehicle applications such as the control of electronic sunroof,mirror adjustment,central door lock activation,and air conditioning only need lowbandwidth communications.Thus,LIN is developed,which has low transmission rate.The design of Lin is relatively simple,as a result,it has low cost.Thus,it is often used in low speed communications which usually do not require stringent latency performance[12].MOST is primarily designed as the carrier of entertainment data with high bandwidth and is more popular in premium vehicles [13].With the continuous development of automotive electronic technology and the integration of automotive systems,peo-ple can drive cars through electronic.Then critical applications emerges such as braking,direction control and other security systems.Thereby,low latency and certainty become important.To achieve these targets,FlexRay is designed,which has high determinacy and fault-tolerance.It is a technique suitable for power transmission and chassis control.The automotive FlexRay technology provides a higher bandwidth of 10-20 Mb/s and is utilized wherever there is a demand for strict real-time communication.This timetriggered approach allows for predictable delay.This predication is independent to overall bus load [14].However,it requires a complex configuration process,as well as synchronization of the network communication scheduling and software task scheduling across multiple ECUs.In addition,its bandwidth is still not enough for more and more transmission requirements of in-vehicle networks.
To provide higher bandwidth,Ethernet is introduced to in-vehicle networks.Both duplex and single twisted-pair Ethernet can be in vehicular TSN.For example,IEEE 802.3bw [15] specifies a data rate of 100 Mb/s full duplex over a single unshielded twisted pair,which can support multiple protocol types such as AVB,transmission control protocol/internet protocol (TCP/IP),diagnostic communication over Internet protocol (DOIP),and scalable service-oriented middleware over IP(SOME/IP).However,current invehicle Ethernet is only used for point-to-point data transmission like bus.A/V streams and control signals are usually transmitted in separated Ethernet cable instead of mixed since it is difficult for Ethernet to transmit mixed traffic in a cable with guaranteed performance.In addition,traditional Ethernet cannot be directly used for supporting new applications such as ADAS and multimedia functionalities,which have more requirements,e.g.,the coexistence and scheduling of multiple type of traffic,synchronization of different devices,the security certainty and low latency of data transmission.Thereby,TSN is used for integrating Ethernet into vehicle networks.Through adding functionalities such as synchronization,scheduling,resource allocation,and configuration methods to media access control layer (MAC)layer,TSN provides low latency and deterministic network for automobile applications.Although Ethernet provides larger bandwidth and TSN technique provides deterministic character for Ethernet,bus technique will be coexistent with Ethernet technique in the vehicle communication area for a long time in the future due to their different advantages and user requirements.
2.2 Vehicle E/E-Architecture
Since the information transmission layer is included by the E/E-architecture,the design of automotive Ethernet based TSN is constrained by the E/Earchitecture.In terms of network architecture,computers,sensors and actuators are the main execution parts.The design of communication technique among execution parts needs low latency,easily controlling,low wire cost,and fewer computers.Simultaneously,it needs the design of E/E-architecture cooperating with communication techniques to make in-vehicle networks low latency,easily controlling,low wire cost,and fewer computers.To achieve these goals,authors in [16] proposed an Ethernet-based architecture to provide guaranteed performance and support communication requirements of in-vehicle networks.In [17],authors reviewed the evolution of E/E architecture and outlined the requirements-driven developments.The development of E/E-architecture has experienced function-oriented architecture design,centralized control design,different space-oriented design and module-oriented design schemes [18].The connections and develop trend is shown in Figure 1.The characteristics of four different models are compared in Table 3.
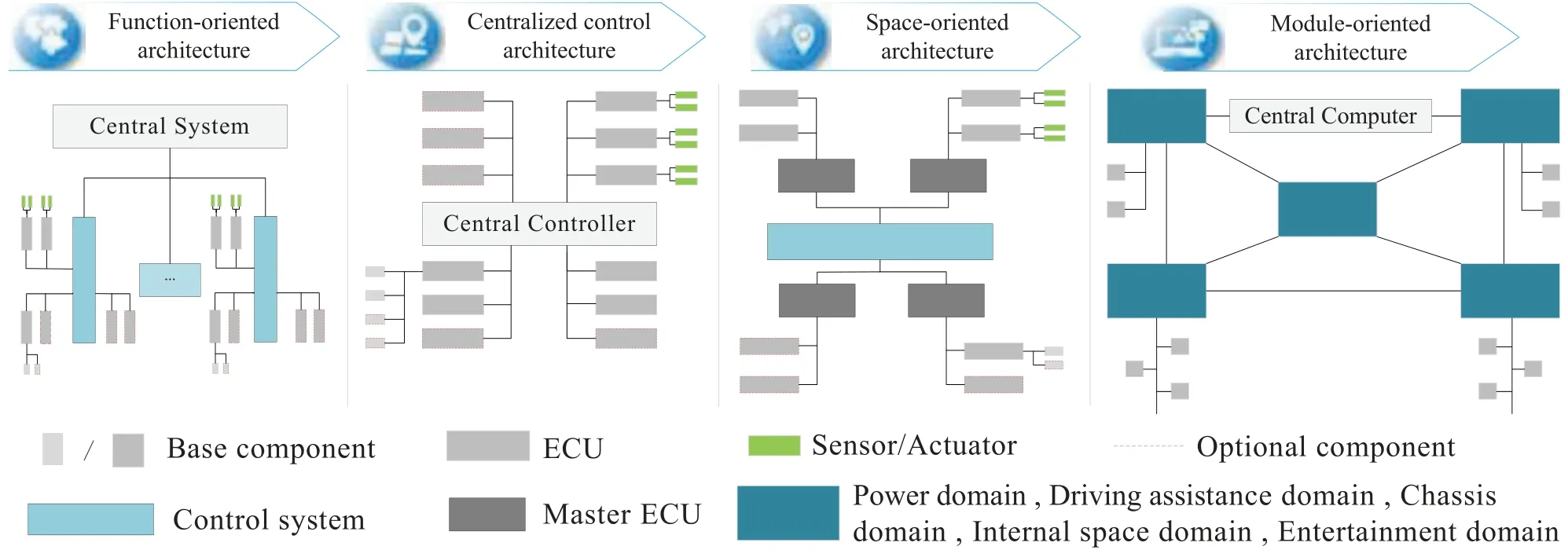
Figure 1. The connections and develop trend of four architectures.
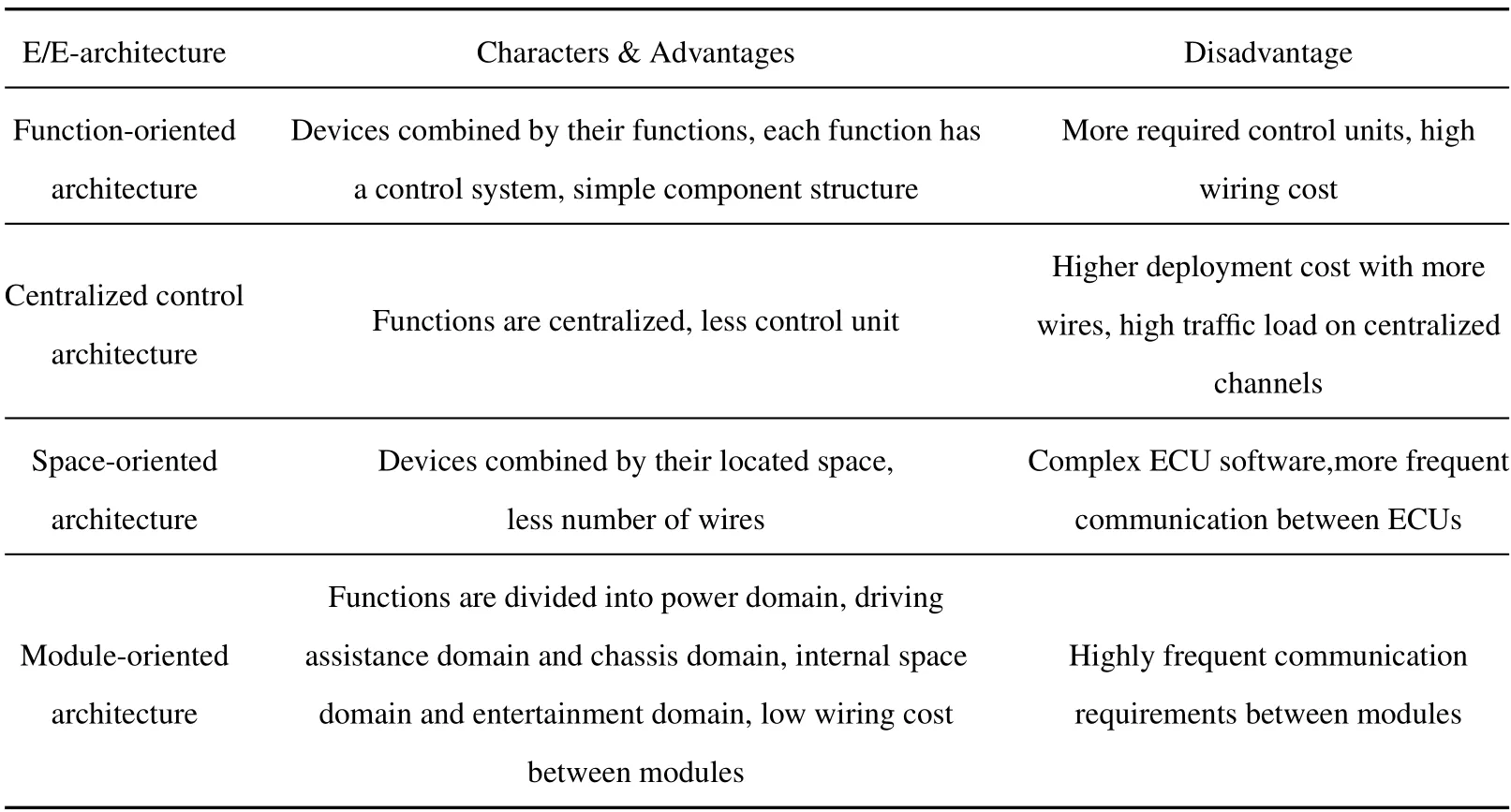
Table 3. E/E-architecture models.
For the function-oriented architecture,it combines the function of each discrete component and its related sensors and actuators into a whole.Each function has a control system for centralized control.The component structure is simple,and the functions are few.However,the number of required components and computers is large,and wiring cost is high.For the centralized control architecture,all functions are controlled by a central computer.Therefore,the number of computers used is reduced.All functions are completed by a control unit,which reduces the development cost of control unit and ECU.However,because all sensors and actuators must be centrally located,the number of wiring harnesses is increased.In addition,all centralized control is not conducive to satisfy demands of network determination and delay of new applications such as intelligent driving.For the different space-oriented design,several ECUs control all functions of the whole car.In each space,the master ECU controls related slave functions,and information transmission is only carried out between ECUs,so that the sensors and actuators in each area can be arranged near the main ECU in this area.Therefore,the communication between the main ECUs reduces the number of wiring,but increases the complexity of the software required by the ECU.Furthermore,it also increases the demand for communication between ECUs.
For the module-oriented design scheme,it divides vehicle functions into power domain,driving assistance domain and chassis domain,internal space domain and entertainment domain.In this architecture,the control circuit of sensors and the actuators in the module can be integrated,and external data can be received through the bus.The central component in the module can provide power to the sensor and the actuator at the same time,so the wiring cost between the modules is low.However,the installation location environment in the module may not be suitable for all the electronic components.In addition,communication requirements between modules have also increased.However,the wiring cost reduction brought by this architecture and the test convenience brought by the module words are more suitable for future communication needs.Therefore,some literature studied how to balance this automotive architecture with TSN communication technology.For example,an architecture with a novel networking device was introduced and discussed in[19]to provide low-latency switching and routing.It tested TSN based on an integrated fieldprogrammable gate array(FPGA)with a standard processor.Results showed that it achieved a latency of 2-2.5μsbased on 12 Gigabit Ethernet ports.
III.TSN STANDARDS
The TSN technique is composed of a set of standards specified by IEEE 802.1 TSN work group and many of these standards are still being updated.One of ongoing standard,IEEE P802.1DG,is specified for automotive in-vehicle bridged IEEE 802.3 Ethernet networks.This standard provides profiles for designers and implementer of deterministic IEEE 802.3 Ethernet networks that support the entire range of in-vehicle applications including those requiring security,high availability and reliability,maintainability,and bounded latency [20].Except this exclusive and general specification for in-vehicle networks,in this section,we will also survey all the latest set of TSN protocols to date that can be used for in-vehicle networks and give a taxonomy of these protocols according to their use,which is a basis of further investigation.In addition,we highlight shortage of existing TSN specifications,which will facilitate further research on standards improvements.The classification and general descriptions of these standards are listed in Table 4.
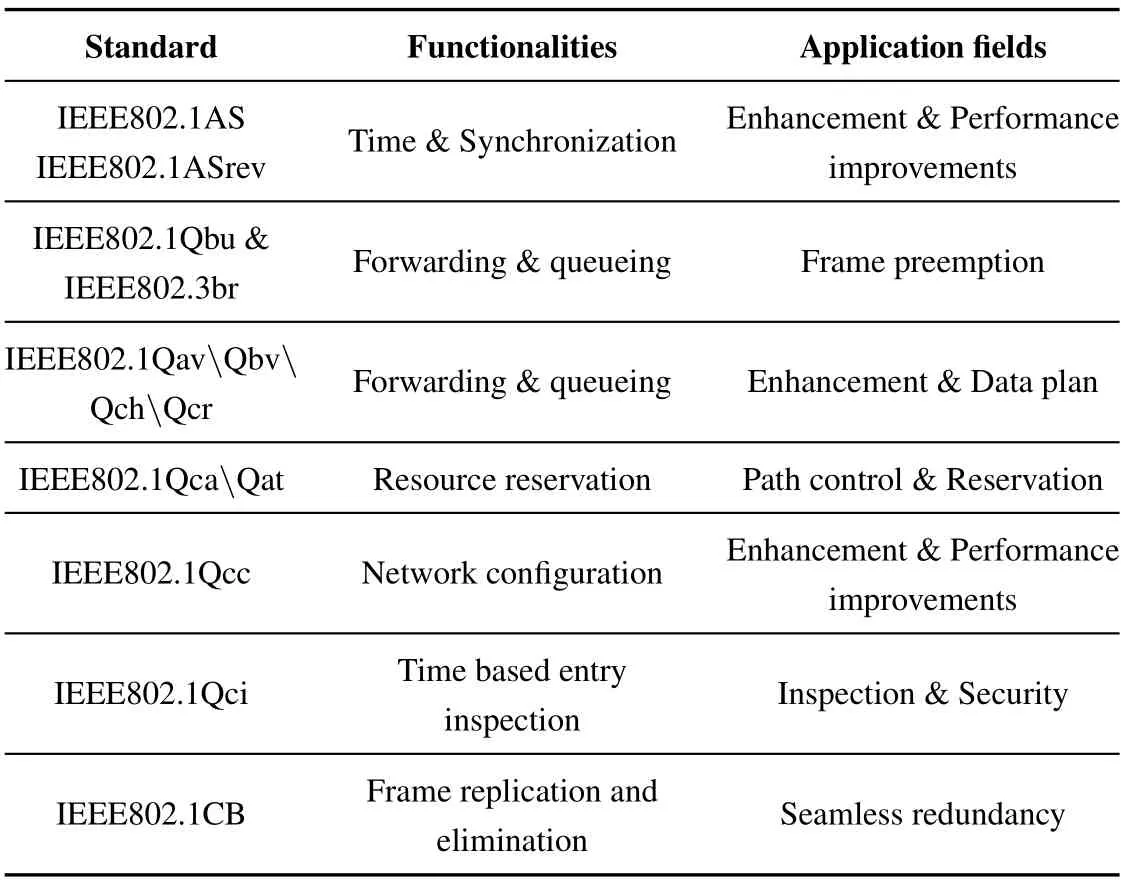
Table 4. Classification and general descriptions of automobile related TSN standards.
3.1 Synchronization
The synchronization of TSN is mainly defined in IEEE Std 802.1AS related standards,which was developed based on IEEE 1588 PTP [21].In 802.1AS,a grandmaster (GM) is selected or designated as the best clock.All time sensitive nodes synchronize their clocks with the GM periodically.This time synchronization is realized by step-to-step synchronization between two communication nodes where one node is acted as master and the other is slave.The master sends sync message periodically and the slave port can adjust its clock frequency and acquire accumulated residence delay(delay between received time and forwarding time in a relay node)from sync messages.A slave port will send delay request message to the master if it finds clock is not synchronized,and the master port will response it with two signaling messages,i.e.,a delay response message and a delay response followup message to transmit the receiving time of delay request message and the sending time of delay response message.By utilizing the time included in received messages and the sending time of delay request,the slave port can calculate the transmission delay between master and slave.Then it can adjust its time to the GM,i.e.,synchronization.
Through the synchronization,this standard enables systems to meet jitter and latency requirements of time-sensitive applications.For automotive driving applications,time synchronization is a preliminary and important character.For example,an ADAS decision is usually made based on fused sensing information of different devices such as radar and camera.These devices need to be synchronized before the data infusion.Thus,major manufacturers realized this function in their automotive driving products at the earliest.
For the synchronization,GM provides the reference time for other devices of network,which can be selected based on standardized best master clock algorithm (BMCA).The shortcoming is that BMCA needs frequent information exchange and comparison to select the best clock among all devices and ports.This will bring more overhead cost and longer latency.Thereby,it prefers to designate a GM for invehicle applications.However,the damage of GM will lead to un-synchronization and failure of implement of TSN.Preparing some alternative GMs may be a potential approach to solve this problem.For the future standardization of synchronization,such as IEEE P802.1ASdm,it no longer selects the GM.It will specify different synchronization domains.In addition,it uses potential GM and synchronization domains for hot standby.
3.2 Scheduling
Scheduling methods are cores in current TSN standards and study.With scheduling,it not only eases bursty traffic and reduces the network congestion but also queues and forwards different traffics reasonably according to their priorities.In addition,these standards are also expected to reduce the side effect of new introduced time-sensitive traffic on general traffic.To achieve these goals,IEEE Std 802.1Qav,IEEE Std 802.1Qbv,and IEEE Std 802.1Qch defined different time-aware queuing and forwarding protocols[22].An abridged general view of these scheduling methods is shown in Figure 2,where 802.1Qbv is shown within blue dotted box and 802.1Qch is shown within green dotted box.Qbv and Qch schedule traffic based on the open and close of gate while Qav schedules traffic based on credit values.Qbv and Qch can be used in conjunction with Qav or separately.
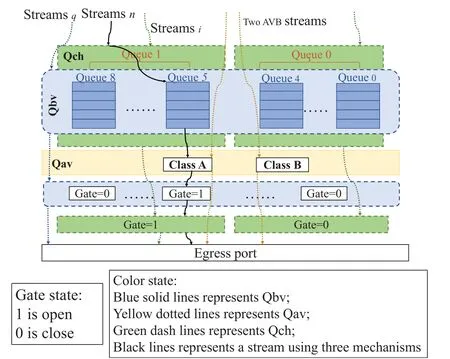
Figure 2. A sketch of TSN scheduling transmission.
802.1Qav specifies a forwarding and queuing of time sensitive streams (FQTSS) scheduling method called credit-based shaper (CBS) scheme for packets with different priorities [23].In this scheme,the transmission time of frame is determined by a credit.When the credit value of frame is not negative,the frame can be transmitted from the egress,otherwise,it is not allowed for transmission.The value of credit depends on the reserved bandwidth for this stream.Note that only time-sensitive applications are scheduled by CBS in 802.1Qav.Non time-sensitive applications are scheduled by the strict priority scheme,i.e.,stream with high priority will be transmitted firstly.For 802.1Qbv,it schedules both time-sensitive and non-time-sensitive applications by opening or closing gates.Each queue corresponds to a priority of streams and a gate.Through controlling the time of opening a gate,node can control the occupied bandwidth of each class of traffic [24].802.1Qch defines a cyclic queuing and forwarding(CQF)scheme which utilizes two queues at the egress port and only a queue is transmitting at any time.While one queue is enabled,all received messages during this time are allocated to the other queue [25].The cyclic queuing model of CQF installs static configurations on the gate control lists (GCL) of time aware shaper (TAS)of a TSN switch.Thus,comparing with scheduling methods of Qbv and Qav,CQF simplifies the design and easy to use.However,the cyclic queuing model of CQF will introduce jitter of two cycles,which affects performance of synchronous applications such as sensing information infusion.To make use of advantages of different scheduling schemes,the industry tends to integrate various scheduling schemes to meet service qualities of different applications.Above scheduling methods need synchronization among network nodes.If the synchronization does not function appropriately,scheduling methods need synchronization will miss the transmission window and affect the following nodes in the network,leading to performance reduction.In addition,periodic synchronization among nodes will cause much bandwidth cost,which will reduce the bandwidth utilization.An ongoing standard,IEEE Std P802.1Qcr,provides an asynchronous traffic shaping(ATS)method[26].It prioritizes urgent traffic over relaxed traffic.Thus,ATS can overcome shortcomings led by synchronization.In addition,periodic time assignment of synchronizationbased scheduling method is not suitable for sporadic traffic.Since ATS can shape streams based on a timing scale,it allows a certain scope of bursty transmission.
By using these queuing and forwarding schemes,the latency of time-sensitive traffic can be reduced and guaranteed.Furthermore,streams can be smoothed,thereby,network congestion can be reduced.Based on these TSN scheduling methods,it provides possible solutions to support future automotive driving,particularly for tight control applications such as steering,braking,and propulsion over Ethernet.For example,chassis control data needs to be delivered with determinacy and low latency.The automotive industry generally requires that the chassis system delay does not exceed 5 milliseconds,preferably 2.5 milliseconds or 1 millisecond.For further providing the transmission certainty for critical traffic,frame preemption can be used by combining it with above scheduling methods such as that of 802.1Qbv and 802.1Qch.The frame preemption is standardized by IEEE Std 802.1Qbu[27].It defines that frame preemption which enables time-critical frame to preempt the transmission time of non-time-critical frame[27].
Existing scheduling methods of TSN can be divided into centralized and distributed.For centralized scheduling,traffics are scheduled by a central node.For distributed scheduling,traffics are scheduled by each node itself.Distributed scheduling will not strictly schedule traffic to obey the allocated bandwidth.Therefore,its scheduling only obeys the reserved bandwidth softly leading to uncertain latency especially for multihoptopology.In addition,information exchange also brings abundant overhead for dynamic topology or long path.Furthermore,for automotive applications,some unexpected traffic,such as braking command,requires urgent transmission while new coming traffic needs re-scheduling for distributed schemes.A distributed scheduling is not efficient under such cases.On the contrast,centralized scheduling can schedule traffic without frequent information exchange and schedule all nodes along the path simultaneously.However,the selection,deployment,and robustness of the central node will affect the scheduling results significantly.The design of TSN scheduling should balance the advantages of both type of methods.In addition,the queuing of different traffics may use different scheduling schemes.For example,periodic traffic and sporadic traffic need to be scheduled according to their characters.A unified scheduling is better for improving scheduling efficiency.A better solution is to study how to unify or select 802.1Qav,802.1Qbv,802.1Qch,strict priority and asynchronous schemes at the egress port according to the type of traffic and transmission requirements.Lastly,non-timesensitive traffic can be preempted by time-sensitive applications as designed by 802.1Qbu.However,the efficiency of this preemption should be investigated especially for those busy network scenarios.In the resource allocation method,non-time-sensitive traffic are originally allocated to less bandwidth.The preemption of guarded bandwidth by critical traffic may be trivial.It is expected the scheduling may be flexible or based on traffic predication.
3.3 Resource Reservation
To guarantee the deterministic transmission of critical traffic,resource reservation is used wherein essential bandwidth is preserved for critical traffic.Comparing resource allocation,reserved bandwidth emphasizes that the bandwidth is reserved and planed in advance when traffic does not coming.In IEEE Std 802.1Qat,the amount of reserved bandwidth is calculated based on the transmission rate requirements of time-sensitive traffic.Through reserving a certain bandwidth at each relay along its end-to-end transmission path,the transmission latency can be guaranteed[28].
The IEEE Std 802.1Qca standard uses intermediate system to intermediate system (IS-IS) protocol to extend the function of the shortest path bridging protocol.This protocol enables multiple learned topology to be shared among switches and the shortest path between each end point to be quickly learned to control the bridged network.In addition,the standard also defines a path computation element(PCE)entity,which is used for calculating an explicit transmission path based on a network topology,thereby ensuring the latency of data transmission[29].
Another ongoing standard,IEEE P802.1Qdd,specifies protocols,procedures,and managed objects for a resource allocation protocol(RAP)that uses the linklocal registration protocol (LRP) [30].RAP provides support for accurate latency calculation and reporting.It can use redundant paths established by other protocols.In addition,this standard supports and provides backwards compatibility with the stream reservation and quality of service(QoS)capabilities,controls and protocols specified in IEEE Std 802.1Q[31].
Existing specifications usually reserve bandwidth for critical applications based on stream registration and calculation,which introduce abundant computation and signaling overhead.As a result,the cost of latency and bandwidth will be increased.In addition,the side effect of resource allocation on general traffic should be evaluated and reduced.How to appropriately allocate resources to all traffic with different priorities in the network instead of only allocating resource to critical traffic should be considered.Thirdly,although 802.1Qcc provides a possibility of allocating resources with the consideration of scheduling,a joint resource allocation and scheduling approach needs to be further studied.Without considering scheduling,resource allocation scheme cannot be efficiently realized by the queuing and forwarding.Last but not the least,efficient resource allocation should consider the link state and traffic character.Static resource allocation for different traffic classes with fixed allocated bandwidth ratios not only induces resource waste but also is bad for guaranteeing the transmission latency of critical traffic especially for bursty data or busy networks.
3.4 Robustness and Certainty
In IEEE Std 802.1Qci,it enables switch to filter and supervise incoming streams at the ingress port based on three tables,i.e.,stream filter instance table,stream gate instance table and flowmeter instance table [32].The stream firstly passes through the stream filter and then reaches the flowmeter after passing through the gate.The stream filter instance table is used for filtering operations of frames of a specific stream.The stream gate has a unique identifier to determine whether to allow frames to pass through the gate.The flowmeter tests the stream,thereby performing flow suppression and flow blocking to provide QoS protection.
With these tables,802.1Qci provides QoS protection by traffic suppression and traffic block.For example,traffic of denial of service (DoS) attacks usually attack the network via bursty and abundant traffics.802.1Qci filter performs per-stream filtering by matching frames with permitted stream identities (IDs)and priority levels.Then it can detect whether the stream rate is larger than its reserved bandwidth or not.If it exceeds the permitted rate,it will suppress the rate to the reserved bandwidth by controlling the gate.In addition,it can also prevent network attacks such as address resolution protocol (ARP) attacks,by blocking based on gating mechanism attacks.For automotive applications,802.1Qci can be used for the ingress filtering to provide security.How to configure and update those three tables and how to share security information in the network should be further studied.
Another standard to guarantee certainty is IEEE Std 802.1CB,which specifies frame replication and elimination for reliability(FRER)for the transmission certainty of critical traffic.This standard provides procedures,managed objects,and protocols for bridges and end systems that provide identification and replication of packets for redundant transmission,identification of duplicate packets,and elimination of duplicate packets[33].The sketch map of packet duplication,elimination and transmission based on 802.1CB is shown in Figure 3.
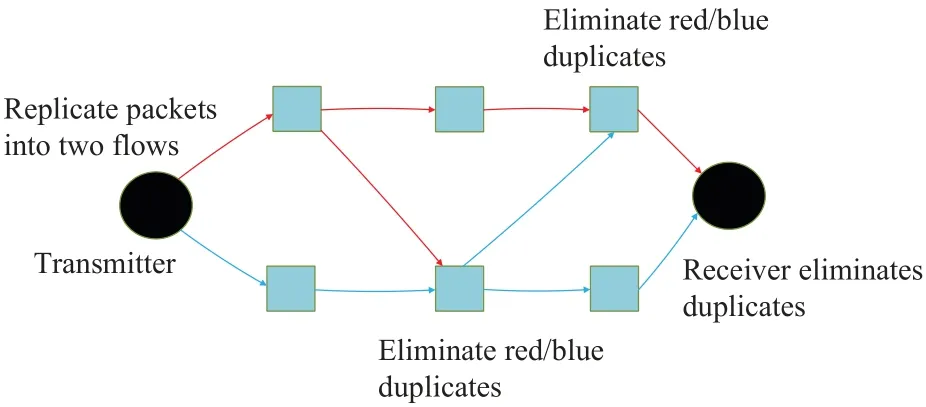
Figure 3. A sketch of 802.1CB.
In this specification,the main defined functions are stream identification,sequencing function,individual recovery function,sequence encode/decode function and stream splitting function.The stream identification function is mainly used for identifying and extracting the stream number of streams.For each stream,the sequence function orders the packet to recover the right order of received packets and discard repetitive packets.The discard of packets at the receiver is realized by the individual recovery function.In the individual recovery function,sent packets are recovered.Sequence encode/decode function is responsible for adding sequence number(i.e.,the number of packets in a stream) or extracting the packet number from the received packets.Stream splitting function can make multiple copies for a packet of a stream.At the same time,the stream number of packets are encoded to guarantee copies of packets can be deleted at receivers.
Through sending packets on different routings,the successful delivery probability can be improved especially when there are some congestion relays.For automotive driving applications,it is important to some critical traffic.As we all know,L4 level autonomous driving requires a redundant processor.With 802.1CB,it can establish the communication mechanism between the main processing system and the redundant processing system.However,the transmission certainty of time-sensitive applications is guaranteed at the cost of the increase of occupied bandwidth.In addition,802.1CB uses redundant transmission to improve the successful transmission probability of critical traffic.An obtained topology from end-to-end is helpful for relay to determine the redundant paths.However,this topology cannot be obtained by each relay,which will affect the execution of redundant transmission.On some congestion paths,the replication of packets will bring more burden to some links,leading to uncertainty and high latency.Although some alternative link may successful transmission packets of stream,packets transmission on the congestion link only aggregates this condition without improving the robustness.
Excepts above standards,some ongoing standards are designed for determinacy [34].To further improve the certainty,an ongoing specification,IEEE P802.1CBdb,extends stream identification functions,which can also be used for Layer 3 for deterministic data transmission.Another ongoing specification,IEEE P802.1CBcv,specifies an information model based on the unified modeling language (UML) for the functions currently specified in 802.1CB standard.Both the YANG data model and the management information base (MIB) module based on the UML model support configuration and status reporting.In addition,another new specification,IEEE P802.1Qcz,which tries to specify congestion isolation to improve transmission certainty of critical applications.In this standard,it specifies protocols,procedures and managed objects that support the isolation of congested data flows within data center environments.This is achieved by enabling systems to individually identify flows creating congestion,adjust transmission selection for frames of those flows,and signal to neighbors.This mechanism reduces head-of-line blocking for uncongested flows sharing a traffic class in lossless networks.
3.5 Configuration
Key parameters used for above specifications such as scheduling,filtering,and resource reservation,are usually configured in advance by the network.Of course,these configuration can be updated and dynamic.IEEE 802.1Qcc provides related configuration methods from a sender to a receiver for deterministic data transmission [22].The configuration can be classified as three models: fully distributed,centralized network/distributed users and fully centralized,where the first two models are focused.For the fully distributed configuration,the network is configured in a completely distributed manner and there is no centralized network configuration entity.Distributed network configuration is performed by using a protocol that propagates TSN user/network configuration information along the active topology of flow.With the flow propagation,bridges along a path can perform configuration locally based on received information.This local management is limited to the information known at the bridge and it may be inadequate due to the loss of the information of the entire network.For the centralized network/distributed configuration,it specifies the management object for bridge configuration through the centralized network configuration(CNC)component.With CNC,some complicated calculation can be performed on it instead of being performed by each end station and bridge.In addition,using CNC collecting a global information it is beneficial for improving the performance of TSN standardization based on a global scheduling,such as 802.1Qat,802.1Qav,802.1Qbv,802.1Qbu and etc..
802.1Qcc is usually used for industry applications and neglected in early automotive TSN products.However,it is also useful for automotive applications.For example,automotive application requirements are usually fixed and the bandwidth reservation for each application stream can be fixed by 802.1Qat.For a large class of real-time applications,including many cyber-physical systems (CPSs),much of the timesensitive network traffic from sensors or to actuators is predictable and periodic,whether 1 cycle/s or 32,000 cycles/s,making a fixed schedule feasible.Endpoint and bridges do not necessary calculate the reserved bandwidth for each stream frequently.Alternatively,we can use pre-configuration based on Qcc for this resource allocation.
In addition,a YANG model is proposed in IEEE Std 802.1Qcp for configuration to achieve a truly universal plug-and-play(uPnP)model[35].The YANG data model provides a framework for periodic status report as well as for configuring 802.1 bridges and bridge components,including MAC Bridges,two-port MAC relays,customer virtual local area network (VLAN)bridges,and provider bridges.YANG is a data modeling language,which defines a template for network device configuration data.For example,after the interface on the network device is modeled,the data sent to the network device through CNC and bridges must conform to the definition of the YANG model.
An ongoing specification,IEEE P802.1Qdj,provides configuration enhancements for TSN.In this standard,it specifies procedures,interfaces,and managed objects to enhance the three models of TSN configuration [36].It specifies enhancements to the user/network interface (UNI) to include new capabilities to support bridges and end stations in order to extend the configuration capability.
IV.TSN-RELATED RESEARCH DIRECTIONS OF IN-VEHICLE NETWORKS
Generally speaking,TSN research is an emerging field.There are some active teams begin to focus the study of TSN,e.g.,scholars such as Lo Bello Lucia from University of Catania,Liu,Yu Qinghan from Nanjing Forestry University,Li Zonghui from Jacksonville University and companies such as TTtech,NXP,marvell and Excelfore.Existing studies on TSN can be classified according to their applicable scenarios,such as industry,autonomous driving,front-haul of mobile networks,aerospace and etc..Existing studies can also be divided according to functional classification of TSN standards and use cases,such as resource management and scheduling,security and robustness,configuration,synchronization,performance analyses and etc..In this section,the latter taxonomy is used.For in-vehicle scenario,only TSN protocols listed in Section III are appropriate for vehicle applications.Corresponding to these protocols,in section IV,we carefully select academic research and only list literature that can be used for in-vehicle network scenario.For these literature in this section,some of them indicate that their considered scenario is invehicle network.Some of them design protocols from a general view,which can also be used for in-vehicle network.Studies on other scenarios will be neglected here.A brief summarize of key take aways in the surveyed papers are listed in Table 5.
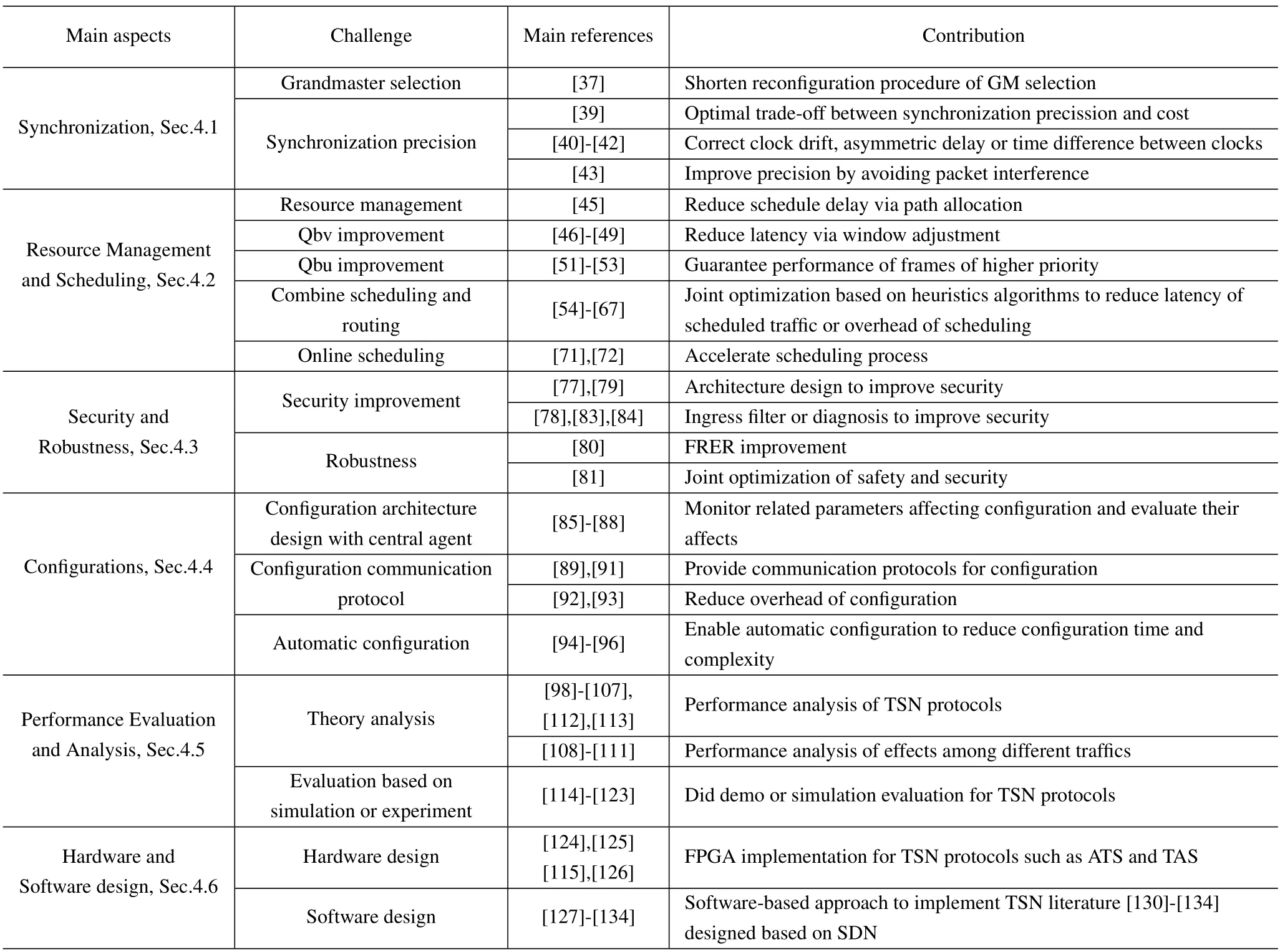
Table 5. A brief summarize of surveyed papers.
4.1 Synchronization
Synchronization is a primary step of implementing TSN to automotive networks.As specified in 802.1AS,the TSN protocol enables time synchronization of devices in the network by providing a common time reference.For the synchronization,the first step is selecting or designating the GM.The selection method in the standard is BMCA.This algorithm will fail if the synchronization message of GM is not received by another node within timeout interval.To overcome this shortage,Y.Jeon et al.proposed a method to re-synchronize GM’s time.In this method,a table was used for indicating a pre-defined sequence of GM to reconfigure GM [37].As a result,the signaling cost and operating time will be reduced for the reconfiguration procedure of GM.
After the selection of GM,sync messages will be transmitted periodically among nodes for synchronization.The precision of synchronization can dramatically enhance the performance of many time sensitive applications [38].To improve the precision,a trade-off between the synchronization accuracy and overhead cost should be investigated where the sync message transmission period has an optimal value.With using the optimal value,synchronization performance of in-car network was certified to be improved in [39].Except synchronization message,other factors such as the calculation of transmission delay of links and residence delay at nodes also affect the synchronization accuracy.Considering transmission delay for a message between a master node and a slave node,a method of synchronizing clocks for a vehicle network was proposed in[40],which could correct a time difference between a master clock and a slave clock.An extension of 802.1AS was proposed to improve clock synchronization in [41].In the scheme,clock drift and asymmetric delay caused by the mobility of nodes were considered.A path deviation delay filter was introduced to monitor the traffic behavior of timing packets as well as to exclude outlier values which could occur as a result of dynamic and asymmetric scenarios,as a result,the synchronization precision could be improved.In[42],authors proposed a concept of link partner,which was on the link path and could observe latency and asymmetry,including offset from master as well as ingress and egress latency on the port.It was showed that the method could provide application-independent real-time network.Considering the clock synchronization inaccuracy resulting from the collision between different packets,authors in [43] proposed a scheme which combined synchronization and priority scheduling for in-vehicle network.As a result,sub-microsecond level clock synchronization can be achieve even there are some interference flows.
4.2 Resource Management and Scheduling
Resource reservation and transmission scheduling is the main method of TSN to provide deterministic and low latency service for time-sensitive and critical traffic,which is also the research focus of TSN.In [44],the scheduling problem was modeled by a configuration-conflict graph,the original traffic planning problem was solved by searching an independent vertex set in the conflict graph.In [45],it presented a comparison,in terms of schedule duration,between scenarios with and without considering port congestion during path allocations.In addition,a path allocation algorithm was developed based on K-shortest path calculations.Inspired by the bandwidth wastage of guard bands in 802.1Qbv scheduling,schedules with lower number of guard bands were designed in[46].In[47],authors proposed a bandwidth partitioning scheme for TSN which could allocate bandwidth for new coming flows while did not affect the existing flows.In[48],authors studied the offset difference between the same-class windows in the adjoining nodes of 802.1Qbv.By optimizing the offset difference,the worst-case end-to-end delay of in-vehicle network was reduced compared existing works.To overcome the uncertainty of bursty traffics in Qbv and guarantee the performance of bursty time-sensitive traffic of vehicle applications,an enhancement to Qbv was proposed in[49],which can schedule emergency traffic immediately and prevent periodic traffics to be affected by the interference of emergency traffic.In [50],the maximum burst was limited by attaching a regulator in the front of a scheduler,as a result,strict bounds of the end-to-end network delay were guaranteed.Through modeling the schedule of TSN by no-wait packet scheduling problem (NWPSP) and mapping it to the no-wait job-shop scheduling problem (NWJSP),a schedule compression method was proposed to reduce the number of guard bands in the schedule.Another method of reducing guard band is like frame preemption such as that standardized in 802.1Qbu.In[51],a genetic algorithm based method was proposed which could be used for determining traffic belonging to preemptable queue or non-preemptable queue.As a result,the transmission reliability in a real-time Ethernet could be improved.In[52],an implementation of the frame preemption mechanism on a low-cost FPGA platform was introduced,which enabled lowpriority traffic to be interrupted by time-critical frames of higher priority.In [53],authors proposed a frame preemption model,which allowed the higher priority frames to preempt the transmission of lower priority frames without resuming any pending frame.Thereby,maximum blocking delay of high priority frame was reduced,which was more efficient for multi-switch TSN networks.
In addition,some literature tried to design optimal solutions by combining routing and scheduling together.Smirnov et al.introduced an approach to generate an implementation with a valid routing and a valid schedule in a single step by solving a 0-1 integer liner processing (ILP)[54],in which mathematical solvers determined both the routing and scheduling decisions with modified routing constraints.With the consideration on joint routing and scheduling,authors in [55] proposed K-shortest path and a metaheuristic randomized adaptive search procedure for time-triggered traffic,based on which,the end-toend delay was reduced.In [56],a heuristic incremental scheduling algorithm was proposed to minimize the impact of re-configuring schedule on existing flows.The work in[57]developed two algorithms for time sensitive networks.The first algorithm was based on genetic algorithm which generated schedules under real-time constraints.The second algorithm was based on fixed routings and implemented as a list scheduler.To reduce configuration overhead of scheduling,authors introduced graphical modeling tool in[58].This tool exploited object oriented modeling,logic programming,and satisfiability modulo theories which could provide a feasible schedule programme step-by-step.With the joint consideration on topology,routing,and scheduling,a greedy heuristic algorithm was proposed in [59],where the topology could be constructed iteratively to make messages be routed through disjoint paths with a feasible schedule and the network cost was minimized.In[60,61],the problem of TSN scheduling based on 802.1 Qbv was mathematical formulated,based on which,whether the TSN schedule was consistent with constraints or not could be analyzed by the aid of satisfiability modulo theories.Some works studied the schedule of time-triggered traffic by formulating scheduling problems based on ILP[62–64].With the consideration of dynamic traffic,authors in [65] proposed four different heuristics algorithms to solve the scheduling and routing problem under the zonal architecture of invehicle networks,which could quickly design scheduling and routing methods when traffic load varies.In[66],authors designed a joint scheduling and routing scheme of static traffics for load balancing,as a result,more dynamic traffics can be scheduled.In[67],four different dynamic scheduling and routing heuristics were analyzed to support FRER functionality in TSN based IVN.Considering multi-hop no-wait scenario,the joint problem of message fragmentation and nowait scheduling was studied in[68].By using a heuristic algorithm,which constructed low-delay fragmentation and scheduled based on message delay analyses,low-latency scheduling can be realized for real-time traffics.Similarly,authors in [69] also used heuristic scheduling to guarantee real-time performance.
Except offline scheduling[70],some literature proposed online scheduling to provide real-time control for deterministic latency and jitter guarantees.In[71],authors proposed an online scheduling approach which included an offline scheduling phase and an online rescheduling phase.The offline phase targeted to increase reusable scheduling results,the online phase proposed a heuristic scheduling approach to reuse the results of the offline phase as much as possible to accelerate the rescheduling process.In [72],authors proposed an adaptive group routing and scheduling approach in multicast time-sensitive networks.The framework of this approach contained three phases including pre-processing,schedule synthesis,and postprocessing phases.In the pre-processing phase,the topology was simplified by discarding some unnecessary links.Then the schedule synthesis phase jointly considered routing and scheduling processes based on the simplified topology.In the post-processing phase,the scheduling results of previous phases is handled to generate a feasible schedule.
4.3 Security and Robustness
For autonomous vehicles and connected cars,more and more ECUs are assembled inside automobiles.More autonomous in-vehicle operations are based on critical data,which are communicated among ECUs and detection devices via Ethernet [73].In addition,75% of vehicles have the capability to connect to the Internet by 2020 [74].The security risks of automobiles have become prominent along with the increasing complexity and connectivity of modern vehicles[75].In[76],authors discussed more than 30 potential security issues and threats of IEEE 802.1 TSN protocols.Thereby,the security and robustness should be considered for the transmission of critical data.The security considerations and the expected E/E architecture for applying automotive Ethernet to vehicles were described in[77].To enhance the security and safety of the vehicle’s internal network,authors indicated that the connectivity domain that connected to the external network must be physically separated as well as logically.In addition,transmission data should be classified for security levels according to their importance and necessary security functions should be applied based on the security levels.To guarantee secure communications,three functionalities,i.e.,authentication,integrity and confidentiality were combined for high important data.
Except TSN standards 802.1CB and 802.1Qci discussed above,the IEEE 802.1 security task group devotes to standardize solutions and protocols for port authentication,key agreement,integrity and confidentiality,and device identity.Port authentication and key agreement methods were proposed in IEEE 802.1X and its amendments.When some devices connect to ports,it provides protocols to determine whether connect or not[78].It also defines solutions to re-key to mitigate and avoid replay attacks.
In [79],a communication subsystem that tolerates permanent and transient faults was proposed,which added some degree of dynamic fault tolerance to reduce the faults of both periodic and sporadic realtime messages.In [80],authors indicated that FRER used in 802.1 CB could induce unintentional elimination of packets in some scenarios.Thus,they proposed an improved scheme based on FRER which could prevent unintended packet eliminations independent from the deployment scenario.Considering security attacks induced by increased connections of autonomous driving,the safety and security problem was jointly designed for Ethernet-based automotive networks in [81].The security of the TSN automotive Ethernet was analyzed in [82],based on which,possible countermeasures for the security of automotive TSN were given to provide a complete automotive Ethernet protection system.They demonstrated that safety and security could work together,but sometimes there was a trade-off between them.To prevent attacks of cars,an enhancement to 802.1 Qci was proposed in [83],which collected and evaluated ingress anomaly reports with the aid of SDN.In[84],the diagnostic services which were used for diagnosing fault injection was investigate.Since there is no global time base at the beginning of the startup process of synchronization,failures at the startup process brings difficulty for diagnosing,deep learning was utilized in this work for solving this problem to improve diagnostic efficiency,as a result,improve the security.As surveyed in [75],no related research designed intrusion detection system for automotive Ethernet.To enable TSN to be realized in automobiles,the security mechanism should be considered in combination with invehicle background in the design and theoretical analysis stage of automotive Ethernet.
4.4 Configurations
Obviously,various kinds of TSN protocols will be benefited from appropriate configuration.Some recent literature focused on how to configure with less overhead and higher efficiency.For the configuration control,one of methods is to utilize a configuration agent for performing configuration.By using the configuration agent,it can monitor related parameters affecting configuration such as characteristics of traffic[85],and topology variation [86].For example,authors evaluated the effects of new added sensors on other existing critical applications and the effects of configuration of TSN standards for automotive network in[58].Farzaneh et al.proposed a Logic Programming (LP)based model to describe these effects in [87].Then,the mutual influence of application requirements in relation to TSN standards can be evaluated.In [88],a configuration agent architecture was presented and a simple scheduling heuristic was proposed to guarantee the schedules of dynamic flows could be quickly generated and configured.
With these monitoring observations and the evaluation of their effects,the configuration agent can trigger its configuration and adapt the configuration for data transmission requirements of TSN networks.Except the configuration architecture,communication protocols of the configuration agent are also needed to exchange learning messages and configuration messages among users and the agent.The YANG model gave a solution to this problem [89],which could be used with the network configuration(NETCONF)protocol[90] for creating a configuration management protocol.New ingredients (managed objects) of a YANG model to make it support configuration based on learning were studied in[91].
For communication protocols of configuration,overhead is a key factor determining the performance of configuration,thereby,affecting the performance of critical applications.For TSN configuration,the dominate overhead comes from queuing and forwarding.The performance of queuing and preemption of TSN have been evaluated in[92]for stream-based scheduling,class-based scheduling,and frame preemption.Based on this evaluation,the calculating of class-based scheduling configuration was also analyzed.To reduce the overhead of configuration for scheduling,authors in [93] designed a topology-based approach regarding plug-and-play and automatic network configuration.The approach can be used for designing a concrete in-vehicle network based on TSN including knowledge that is required for automatic configuration.The control and management to satisfy realtime requirements in future automotive communications was performed by combining software-defined networking (SDN) with TSN.From the simulation,authors claimed that the control overhead of SDN could be added without a delay penalty for the TSN traffic when protocols were mapped properly.
In [94],authors proposed an automatic configuration method where protocols can adjust the resource reserve adaptively according to traffic requirements without the declaration of users.For example,SRP used in 802.1Qat can automatically configure resource for different streams without exchange nodes status along forwarding path.With the omission of declaration,the configuration time and signaling cost can be reduced.In[95],authors focused the configuration of synchronization standardized by 802.1AS where a self-configurable solution to synchronization was proposed.With the solution,the switch of grandmaster has less impact on the configuration of time synchronization.In [96],authors proposed a configuration method based on hybrid genetic algorithm for 802.1Qbv.By using the choice of genetic operators and a neighborhood search,a near-optimal configuration with less computation complexity can be obtained.
4.5 Performance Evaluation and Analysis
When new technologies of TSN are used for in-vehicle networks,performance evaluation is needed to check their effects on performance,whether the expected goals can be achieved or not,and etc..To evaluate the performance of TSN,some literature used an element called network calculus (NC) [97].For example,in [98],authors utilized NC to compute upper bounds on delay and memory used for multiple classes of AVB/CBS traffic in TSN networks.Authors analyzed bounds of end-to-end worst-case latency for a deterministic network that implemented CBS and ATS in[99].The credit upper bounds of CBS were also analyzed in [98,100,101].With the consideration on the effects of gate control lists (GCLs),guard bands and preemption overhead,the latency bounds were analyzed based on a NC approach in[102].In[103],authors used NC for analyzing a mixture of the prioritybased scheduling and time-triggered scheduling for TSN network.In [104],authors analyzed the worstcase delay that individual critical flows could experience along the hops from sender to receiver.Their analysis model and results were evaluated by experiments on both synthetic and real-world use cases.In[105],authors analyzed trade-offs between accuracy and computation time of TSN protocols.It tried to use a faster calculation method to improve the efficiency of network configurations.In [106],authors analyzed residual jitter bounds of networks with all existing dampers in general network settings and showed that the combination of FIFO dampers with non-FIFO network elements may affect the performance bounds.In[107],authors analyzed event-driven traffic performance to show how to handle event-driven traffic with real-time constraints.The analyses showed that eventdriven traffic could have very low maximum end-toend delay by assigning the second highest priority to event-driven traffic.
Except the evaluation of TSN target on low latency,the effect of introducing TSN on existing traffic such as BE traffic was also considered.In [108],authors evaluated the effects of various parameters of high priority traffic classes on the BE traffic in the networks based on TSN standards.Results indicated that several parameters of the high priority traffic such as periods,offsets and preemption modes could have a significant impact on the QoS (e.g.,guaranteed message delivery and message delays) of the BE traffic.For three types of traffic of in-vehicle networks,i.e.,the control data traffic (CDT),the stream reservation(SR)traffic and the BE traffic,authors analyzed their scheduling strategies,i.e.,first in first out (FIFO),CBS and time awareness shaper(TAS)in[109].For the hierarchical scheduling mechanism,the influences of both FIFO and TAS on CBS were analyzed and an approach for the derivation of worst-case response times of SR message was proposed.Considering the worst-case interference imposed by scheduled traffic,authors provided an analysis methodology to analyze the worst-case in[110].In addition,the analyses complexity was investigated and reduced.In[111],performance of TAS and ATS was analyzed,and the evaluation showed that TAS with proper configurations generally achieved the specified latency bounds for both sporadic and periodic traffic,in contrast,ATS performed relatively well for sporadic traffic.
For the reliability and redundancy analyses,Hofmann et al.identified critical aspects and limitations of the 802.1CB in[112],which analyzed risks of inadequate configurations on the performance of 802.1CB.In addition,they provided an intuition and initial steps towards deriving the formal worst-case timing analysis of the standard,which was a key requirement for its safe and efficient implementation in real-time domains.Considering the trade-off between reliability and redundancy cost,authors simulated a redundancy scheme in [113],which corrected temporal errors by using time redundancy.The simulation showed that approach of end-to-end estimation and replication of frames could tolerate a lower number of fault scenario,and that the reduction in the number of replicas significantly impacted the number of tolerated scenarios.
Except theoretical and numerical evaluation,some research did demo or simulation evaluation.To facilitate the analysis of TSN networks,authors presented TSN-specific extensions to the popular OMNeT++/INET framework for network simulations including the time-triggered scheduling mechanism of 802.1Qbv in [114].Besides the design of the TSN simulator,authors presented a proof-of-concept implementation and exemplary evaluation of TSN networks.In[115],authors presented a demo,which can demonstrate that the ease-of-use of the tools in charge of the entire network as well as the provided scheduling capabilities allowing one-click deployment of deterministic communications with properly configured 802.1Qbv and 802.1ASrev sub-standards.To explore the feasibility and applicability of TSN,Jiang et al.developed a TSN simulation model using a module design method[116],and implemented TSN functionality to schedule traffic under configurations defined in terms of GCLs.The developed simulation model confirmed that the presented simulation modules tightly conform to the TSN specifications of deterministic communications with ultra-low jitter.The low jitter and latency were also simulated in[117]by using the TSN scheduling methods.In [118],authors analyzed effects of different preemption configurations on different types of traffics.In[119],it provided an end-toend timing analysis evaluation tool,which integrated into a model-and-component-based software development framework for distributed embedded systems.It was shown that the proposed approach was expressive enough to model the timing information of TSN and the timing behaviour of software that communicates over TSN.In[120],authors designed a testbed system for automotive Ethernet via general-purpose singleboard computers and conduct experiments to assess the real-time performance of TSN.It was shown that even under heavy load,TSN can fulfil the latency and jitter requirements.For the evaluation of Qch,authors in[121]provides a performance assessment based on OMNeT++simulations.In this simulation,an automotive scenario including ADAS and infotainment applications is evaluated,which showed that Qch can provide bounded jitter and latency [121].In [122],an experiment was performed to IEEE 802.1 Q with TSN over an Ethernet-based in-vehicle network.It indicated that the highest priority traffic can be lost due to the shared memory of a switch even TSN is used.In[123],the performance of two scheduling methods,i.e.,TAS and ATS were investigated where a TSNbased automotive gateway testing model in a simulation environment was used for the performance evaluation.It was shown that TAS had better performance on high-priority streams while ATS ensured a better average latency of all streams.
4.6 Hardware and Software Design
For the realization of TSN functionalities,it needs design on hardware and software components.Some designs prefer depend on hardware while some depend on software.Generally speaking,hardware implementation has advantages on clock accuracy,execution latency and low complexity.On the other hand,software implementation is more flexible with low cost.
In[124],authors presented a FPGA implementation for ATS scheduling.In addition,the performance of ATS was compared with that of strict-priority scheduling,which showed that ATS needed more logic and register resources than that of strict-priority scheduling while it required less operating frequency than that of strict-priority scheduling.In [125],a scalable hardware and software co-design prototype based on FPGA was presented,which allowed the attached central processing unit(CPU)to fulfil the timing requirements of real-time automotive applications without interference.Compared with software-only communication stacks,it was shown that the precision of timetriggered frames could be improved by over 10 times due to the aid of hardware.Authors presented a TSN hardware setup via the Slate XNS tool-chain in[115],which realized 802.1Qbv and 802.1ASrev and permitted easy deployment of deterministic communications.In[126],a hardware architecture was proposed to introduce FRER of IEEE 802.1CB to in-vehicle network.In addition,the proposed architecture improved data content verification and performance verification to improve security and robust.
Without hardware support,one problem is the accuracy of time,which is important for deterministic transmission of TSN.In [127],Huque et al.designed a software-based approach to implement GCL scheduling of 802.1Qbv.In this approach,launchtime feature of network interface card was used for providing accurate time for each frame and it was shown that their intended time was in accordance with a given GCL.In [128],authors designed an environment for in-vehicle TSN experiments,which could provide repeatable TSN experiments with high precision and flexibility.In[129],authors given a hardware architecture which could autonomously solve traffic shaping processing,i.e.,providing a common interface for the management of the shapers.In addition,some literature made use of SDN with TSN to provide both real-time transmission feature and network flexibility[130,131].For example,authors evaluated whether a SDN architecture was suitable for timecritical applications in the car in [132].It showed that control through TSN would not introduce delay penalty for TSN traffic if protocols could be mapped properly.Authors in [133] implemented a simplified SRP scheme based onSDN for in-vehicle bridged networks.Results showed that reserved flows could still be well protected even when links of bridges were overloaded.In[134],the management and configuration of TSN,especially for synchronization was realized based on SDN.Then a SDN-enabled testbed was used for evaluation the configuration and it showed that it could achieve nanosecond synchronization accuracy.
V.TSN APPLICATION SCENARIOS FOR IN-VEHICLE NETWORKS
As the grade level of intelligent driving increases from L1 to L3,even to L5,more critical traffic needs deterministic communication.Towards this goal,TSN provides bandwidth reservation,traffic shaping,and universal timing for the reliability requirements.With exclusive transmission path,critical traffic will be transmitted with guaranteed latency and successfully receiving probability.The application scenarios of different TSN design aspects are listed in Table 6.
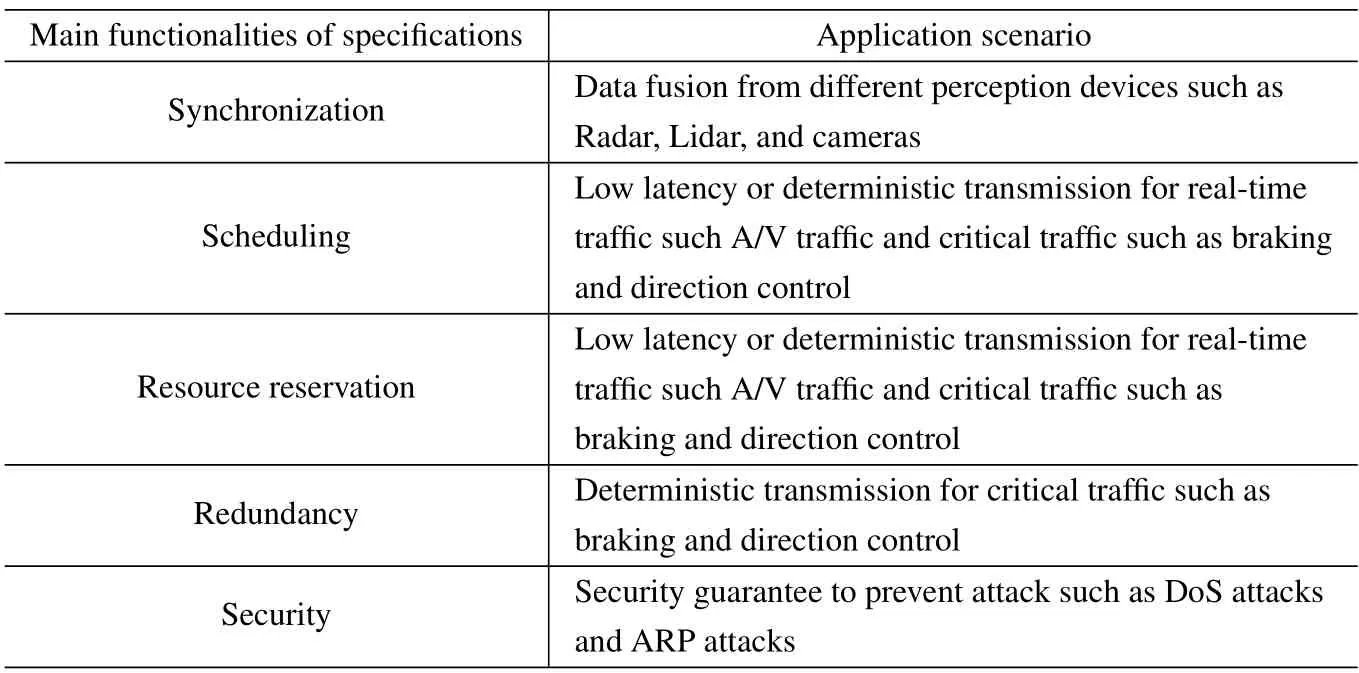
Table 6. Application scenarios of different TSN design aspects.
In detail,information from various perception devices such as radar,lidar,and cameras should be fused for the observed environment before the action decision of intelligent driving.The fusion of data from different devices requires the synchronization among these devices.In addition,audio and visual entertainment,and navigation system such as global positioning system (GPS) also needs synchronization.802.1AS of TSN provides a selection of time base and a method for these devices synchronizing their time stamps to the time base and it allows multiple streams to be synchronized with each other.
Some time-sensitive traffic such as that from backup or driver assist cameras,bluetooth microphones,body control,warning indicators and turn-by-turn navigation commands need low latency guarantee.Many automotive applications require ultra-low latency.TSN supports different scheduling schemes such as CBS,strict priority and cyclic scheduling to guarantee the latency requirements of these applications.Traffic with low latency requirements will be allocated specified bandwidth to transmit all data within the maximum tolerable latency and not be interfered by lower priority traffic.In-vehicle applications such as that listed above usually have different latency and bandwidth requirements.Due to this difference,traffic should be classified according to their QoS requirements.For example,critical message such as control traffic should be allocated to high priority.Then the above scheduling,bandwidth reservation,bandwidth preemption designs can be performed based on the classified priorities.For example,control traffic may be Class A type and is reserved with appropriate bandwidth based on stream register protocol(SRP)and scheduled by CBS.Class A traffic can preempt the bandwidth of that of BE traffic to guarantee its QoS requirement.
Time-sensitive applications such as control traffic and perception traffic of automotive systems also require a shorter configuration time when the communication environment changes,e.g.,the failure of a link or port,and new arrival or leaving communication devices.Multiple TSN standards consider networking design towards quicker configuration.802.1ASrev support multiple simultaneous grandmasters to allow for quick recovery of time sync in failure modes.Then it reaches a minimal risk condition even in the presence of failures.802.1CB provides pre-configuration based on registry.Even if there are some links unavailable,the network can quickly recovery by using pre-configuration.By introducing further flexibility in the E/E architecture,using hardware/software upgrades during the life cycle,system reconfiguration becomes more important.Therefore,802.1Qca provides methods for finding redundant paths and configuring them.802.1Qcc provides the possibility of starting,stopping and registering data streams at runtime.
In addition,as we all know,L4 driverless requires a redundant processor.Then it needs to establish the communication mechanism between the main processing system and the redundant processing system.For this application,802.1AX can provide methods for combining different available paths to provide redundancy.802.1CB provides methods for replicating critical message at sources and bridges and removing redundant copies at receivers to guarantee the performance of transmission.
For the security application and certainty of invehicle networks,802.1Qci can be used for ensuring the transmission of the maximum traffic by avoiding the overload of the communication link.802.1Qci limits the bandwidth allowed on the ports defined on the switch through the so-called per-flow filtering and policy counter measurement value,which is used for avoiding some node traffic overload (due to errors of endpoint or switch),which affects the situation of other nodes.
VI.OPEN ISSUES AND CHALLENGES
The study of TSN has just been launched,the standardization and study of which are still ongoing.From the perspective of above listed research aspects,some challenges and problems are open to be solved.In this section,we will analyze these open issues and indicate possible solutions.
6.1 Synchronization
Current time synchronization protocols has some complex design points such as BMCA selection,interaction of multiple potential grandmasters and gPTP domains.Unlike autonomous industry,these designs may be redundant and resource waste for autonomous driving.For the automotive network,it usually has simple and static topology with known clock accuracy of its devices.It’s an alternative method to predesignate a GM.However,the damage of GM under this situation will lead to un-synchronization and failure of implementation of TSN.Preparing some alternative GMs may be a potential approach to solve this problem.How to specify a GM and determine the number of alternative GMs with low overhead need to be further studied.
6.2 Resource Management
Current resource management strategies are mainly referred in 802.1Qat and 802.1Qca.In 802.1Qat,it provides a decentralized stream registration method and through the stream registration.Resource reservation is completed along the transmission path for critical traffic.However,any new arrival,leaving or new requirements of streams will lead to signaling exchanges along the transmission path of streams.This overhead becomes significant with the increases of hops.Thus,it cannot provide strict transmission latency for critical traffic.In addition,802.1Qat is more suitable for some distributed scheduling methods such as CBS specified in 802.1Qat.In 802.1Qca,similar to explicit routing employed by network layer,a shortest path for the critical traffic transmission is founded before transmission based on the IS-IS protocol and PCE entity.However,the broken of PCE will induce the fail of resource allocation.A hybrid resource allocation method may be a good alternative for this situation,which both considers resource allocation efficiency and takes advantages of the robustness of distributed methods.In addition,a more broadly appropriate resource allocation method,which should be co-designed with scheduling methods to cooperate and achieve higher performance.Finally,the resource allocation method should not only consider reserve resources for critical traffic but also consider its effects on general traffic to design a fairer scheme.
6.3 Scheduling
Existing scheduling methods can be divided into centralized and distributed.Distributed scheduling will not strictly schedule traffic by obeying the allocated bandwidth.Therefore,its scheduling only obeys the reserved bandwidth softly leading to latency exceedingly especially for a topology with multi-hops.In addition,information exchange also brings abundant overhead for dynamic topology or long path.For automotive applications,some unexpected traffic,such as braking command,requires urgent transmission,which also bring the program of resource allocation and scheduling.A distributed scheduling is not efficient under such cases.On the contrast,centralized scheduling can schedule traffic without frequent information exchange and schedule all nodes along the path simultaneously.However,the selection,deployment,and robustness of the central node will affect the scheduling results significantly.How to balance the advantages of both type of scheduling methods is an open issue.In addition,the queueing of different traffic are separately which may use different scheduling schemes.A unified scheduling is better for improving scheduling efficiency.Current time-triggered traffic can be preempted by time sensitive traffic by frame preemption defined in 802.1Qbu.However,the efficiency of this preemption should be investigated especially for those busy network scenarios.
6.4 Configuration
802.1Qcc provides different ways for the configuration of TSN networks such as centralized,hybrid and distributed methods.And the configuration language description is introduced in 802.1 Qcp.The cost of current configuration model is still higher to satisfy resource reservation and scheduling based on existing schemes.Some distributed configuration methods are more suitable for industry 4.0 with complicated environment.For automotive network,more configuration study should be done based on the future zone architecture.
For recent research on configuration control,most of them focused on centralized controlling with configuration agent for performing configuration.How to optimize configuration performance with lower signaling cost and how to solve the problem that the configuration agent is out of work should be further studied.
6.5 Robustness and Certainty
The transmission robustness and certainty of critical traffic are usually guaranteed by providing redundancy and enough transmission resources.Generally speaking,this guarantee is at the cost of transmission efficiency.However,the latency performance will be reduced especially for high-load networks.The trade-off between robustness and resources efficiency should be studied.In addition,the side effect of robustness on general traffic and their trade-off should also be considered.From another perspective,the robustness of transmission is also affected by the security of networks,which has been less studied in TSN except some ingress filtering protocols proposed by 802.1Qci.
6.6 TSN Based on Wireless Channel
Most of current research focuses on Ethernet based TSN.Considering wireless connectivity can enable flexibility,scalability,and lower costs,TSN based on wireless channel is attracting more attentions,especially for that on industry 4.0[135–137].For the standardization,IEEE P802.11be targets to reduce worstcase latency and jitter in wireless local area network.TSN sub-standards are redesigned to consider specific characters of wireless channel to integrate TSN with IEEE P802.11be.For the standardization,IEEE P802.11be targets to reduce worst-case latency and jitter in wireless local area network.TSN sub-standards are redesigned to consider specific characters of wireless channel to integrate TSN with IEEE P802.11 be [138].For automotive networks,wireless channel is usually used for low-latency transmission of inter-vehicle communications.For intra-networks,the study of TSN based communications has not started.Although the application of wireless communications will bring much advantages,such as the highly reduction of cables and cost,it still needs comprehensive research to overcome some disadvantages.For example,the communication uncertainty,interference,signaling attenuation,access coordination induced by wireless signal broadcast.Therefore,corresponding resource management,channel access,scheduling,configuration and security need to be future investigated.
6.7 Other Fields
Excepted above focused research points,some research fields are open to be studied.For example,the integration of TSN and edge computation will be useful for satisfying real-time transmission and optimizing the configuration.By utilizing edge computation,network controller can analyze related parameters for resource allocation,scheduling and redundant transmission.With appropriate modeling,analyses and decisions,the determinacy and timeliness of TSN will be improved.In addition,the integration of 5G and TSN will further guarantee the latency of end-to-end traffic transmission especially for multiple TSN networks.For autonomous driving,this integration can utilize both 5G URLLC and TSN,which not only guarantee data transmission inside the vehicle,but also intervehicle and vehicle to road station.Finally,more TSN products and test for automotive networks need to be developed,which can be used for automobiles to guarantee deterministic transmission for critical traffic of intelligent driving.
VII.CONCLUSION
Time sensitive networking (TSN) provides a possible solution to deterministic and low-latency data transmission,which will be a promising networking technique for autonomous driving.For in-depth understanding and future study of TSN,we comprehensively surveyed recent research from both academics and industry in this paper.The surveyed results showed that synchronization and scheduling attracted most attention in the past several years.However,much work need to be done to acquire the benefits of TSN,such as co-design of resource reservation and scheduling,fast autonomous configuration,co-design of security and safety and etc.In addition,the feasibility of TSN to automotive applications were analyzed from the perspective of synchronization,resource management,scheduling,safety and so on.More detailed automotive applications based on TSN as well as open issues listed above should be further studied.Thereby,this work is expected to accelerate future research of TSN based on insights provided in our work.
- China Communications的其它文章
- Secure and Trusted Interoperability Scheme of Heterogeneous Blockchains Platform in IoT Networks
- Intelligent Edge Network Routing Architecture with Blockchain for the IoT
- Privacy-Preserving Deep Learning on Big Data in Cloud
- PowerDetector: Malicious PowerShell Script Family Classification Based on Multi-Modal Semantic Fusion and Deep Learning
- Dynamic Task Offloading for Digital Twin-Empowered Mobile Edge Computing via Deep Reinforcement Learning
- Resource Trading and Miner Competition in Wireless Blockchain Networks with Edge Computing