基于前端处理的斜拉索索力智能监测系统研究
2023-11-08 09:51董桦桦荆国强马长飞李东明
公路交通技术 2023年5期
董桦桦, 荆国强, 马长飞, 李东明, 冯 欢
(1.温州市城市基础设施建设投资有限公司, 浙江 温州 325005; 2.桥梁智能与绿色建造全国重点实验室, 武汉 430034; 3.中铁大桥科学研究院有限公司, 武汉 430034; 4.中国地质大学自动化学院信息实验中心, 武汉 430074)
斜拉索作为斜拉桥的重要受力构件,是桥梁健康监测的重点关注对象。在工程应用中,拉索索力测量常用的测定方法有油压表读数法[1]、压力传感器测定法[2]、磁通量法[3]、雷达非接触测量法[4-5]、基于图像视觉的测量方法及振动频率法[6]。前2种方法一般仅适用于桥梁施工阶段拉索张拉时的索力测定,难以对运营期桥梁拉索的索力进行复测,应用受到限制。磁通量法在初期费用投入、安装方便性方面还有待改善。雷达非接触测量法效率高,Zhao等[7]提出了一种利用自主研发的微波干涉雷达测量大跨度斜拉桥索力的方法,并通过斜拉式人行天桥实际工程进行现场测量,但对测量环境要求较高,测量索面不允许有障碍物遮挡。基于图像视觉的测量方法,Wang等[8]提出了一种基于轻量级智能手机图像算法测量复杂条件下斜拉索振动位移的方法,在视觉振动中对多个项目、多个索面进行实时监控;Du等[9]基于数字图像技术通过相机捕获单点和多点图像来识别索力,将数字图像技术的斜拉索多点振动模式与数值模拟进行比较,然而该方法对光学系统依赖性与要求较强,其识别的准确性主要取决于图像处理算法、特性提取、图像传感器识别量化响应、光源稳定性及视觉系统解析的精度与可靠性。振动频率法,其适用性广且测量精度能满足工程应用要求,因此被广泛应用,王修勇等[10]提出了考虑拉索垂度的拉索-阻尼器系统模态频率的分析方法,研究结果表明使用高阶模态频率方法能更准确测量拉索索力;秦向杰等[11]采用频率法测试斜拉桥拉索索力,通过修正后计算得到的索力值与压力表测定的张拉力吻合度较好;淡丹辉等[12]研究了修正拉索长度提高拉索-阻尼器体系的索力测量精度的方法;高阳等[13]研发了一种便携式无线索力检测系统,显著提高了斜拉索索力检测的精度及效率,但其加速度传感器不具备运算能力;刘大洋等[14]基于桥面-拉索-阻尼器耦合振动的索力合理拾振位置进行了相关研究。
针对索力检测的上述问题,本文提出一种基于频率法的斜拉索智能监测技术,采用可编程测量MEMS加速度传感器,对拉索的振动时域特征值和频域特征值进行前端处理,仅将经过分析后少量有价值的数据传输至健康监测系统,实现了监测数据的无线传输;研究改进索力测试系统,采用大动态弱信号数据采集方法,提高信号测量分辨率和测量系统峰值信噪比,有效识别微弱振动信号中的有效频率成分,提高了索力测量的准确性。
1 频率法测索力技术原理
当拉索在自由振动过程中,其索力和频率之间存在一定的联系。采用频率法测量索力的基本原理是利用索力和频率之间的关系进行间接测量。假设系统的边界条件为两端铰支,由于拉索垂度的影响,使得拉索在3个不同维度上的频谱特性具有各向异性,其基本原理只能用作拉索索力值的估算。部分专家学者[15-16]研究了拉索垂度在拉索振动过程中对拉索索力和频率的影响,并引入了拉索垂度无量纲常数λ,利用最小二乘方法拟合拉索索力的计算公式:
(1)
λ2=(8ml/F)2EAl/{F(l+8m2l3/F2)}
(2)
式中:F代表拉索的内部非实变应力;m代表单位长度下拉索的质量(假设质量均匀);l代表拉索的自由长度;A代表拉索的横截面积;E代表拉索的弹性模量;n代表振动频率的阶数;fn代表拉索的第n阶自振频率。
2 斜拉索智能监测技术的功能设计
2.1 功能设计
斜拉索智能监测系统由数据采集系统、供电系统、数据传输系统和终端服务器组成。供电系统为整个监测系统提供能量,数据采集系统用于测点信息采集,然后通过数据传输系统传输到终端服务器进行数据存储和分析。
斜拉桥在日常运营期间,需监测斜拉索的振动、索力是否异常,一旦有异常状况发生,须立即自动报警,并进行针对性的分析与处理。针对上述监测需求,斜拉索智能监测技术通过高灵敏度MEMS加速度传感器,在设备前端增加分析模块,对数据进行初步处理,实现集索力监测、振动监测、异常振动报警一体化功能。上述功能的实现架构框图如图1所示。

图1 斜拉索智能监测技术实现框图
2.1.1 索力监测
斜拉索是斜拉桥的主要承载元件,是保证斜拉桥整体结构完整性和安全性的关键结构部件。采用频率法监测索力需解决2个难点:一是斜拉索安装合理的阻尼减振装置后,拉索的有效振动信号的信噪比低,不易得到主频明显的振动信号;二是斜拉索出现的主频阶次和外界环境激励关系较大,需识别出有效主频和对应的阶次。
针对拉索振动信号微弱的问题,本文选用了美国ADXL355的MEMS加速度传感器。该传感器具有小体积、轻质量、高性能、低功耗、小惯性、高谐振频率和短响应时间等优点,且很容易在电路中集成和数字化,具有业界领先的噪声性能、最小失调漂移和长期稳定性,能对前端分析模块的电子电路进行优化设计,并通过电路的优化设计,得到高信噪比的斜拉索原始振动曲线。其工作原理是:
1) ADXL355加速度传感器拾取到高信噪比的加速度数据后,在前端处理电路中进行频谱分析;2) 提取最明显的10阶主频数据传输至监测系统;3) 利用斜拉索各阶主频之间的近似倍数关系,剔除主频数据中的异常值,自动识别拉索主频的对应阶次,再根据式(1)频率法计算索力。
2.1.2 振动监测
通过对多座斜拉桥日常振动的观测,ADXL355的MEMS加速度传感器提取分时段的主频后,再提取对应时段的加速度最大值、最小值,并将其数据传输至健康监测系统,原始曲线的价值被充分提取后,可直接删除,降低了数据存储与传输负担,实现了监测数据的无线实时传输,避免了因为大量数据传输丢点引起的频谱分析误差问题,保证了拉索的振动监测效率与精度。
2.1.3 异常振动报警
在前端处理程序上设置报警阈值,当斜拉索在一些偶然作用下,如拉索受到冲击、阻尼器失效、风致振动剧烈时,安装在斜拉索上的加速度信号就会突然增大,超过预先设定的阈值,系统就会报警,并发送异常振动的加速度数据至桥梁健康监测系统中,保证异常振动发生时完整的数据信息分析和回溯,以便管养人员进行拉索异常振动原因的分析。
2.2 工作模式
斜拉索监测系统有2种工作模式:一种是持续监测模式,另一种是唤醒模式。本系统采用了唤醒模式。持续监测模式中,传感器持续监测斜拉索的振动情况,该工作模式下,传感器和CPU需要持续稳定的有线供电来工作,其耗电量大。唤醒模式的基本原理是当拉索振动微弱时使监测系统处于休眠模式,从而大幅降低传感器及CPU的耗电量。休眠模式下,ADXL355传感器静态消耗电流200 μA,这让太阳能供电成为可能。
整个监测系统中,数据通信对能耗的需求是整个系统运行功耗的90%以上,降低通信能耗是本文研究的重点之一。通过2方面进行优化:一是将能在前端消化结束的数据尽量放在前端,减少这部分数据的通信;二是利用数据压缩算法对原始数据进行大幅压缩,传输压缩后的数据,以降低功耗。采用小波压缩作为数据压缩的主要算法,兼顾计算复杂性,选择支撑范围5~9的小波基进行测试,最终选择DB8小波基进行数据压缩,测试结果如表1所示。
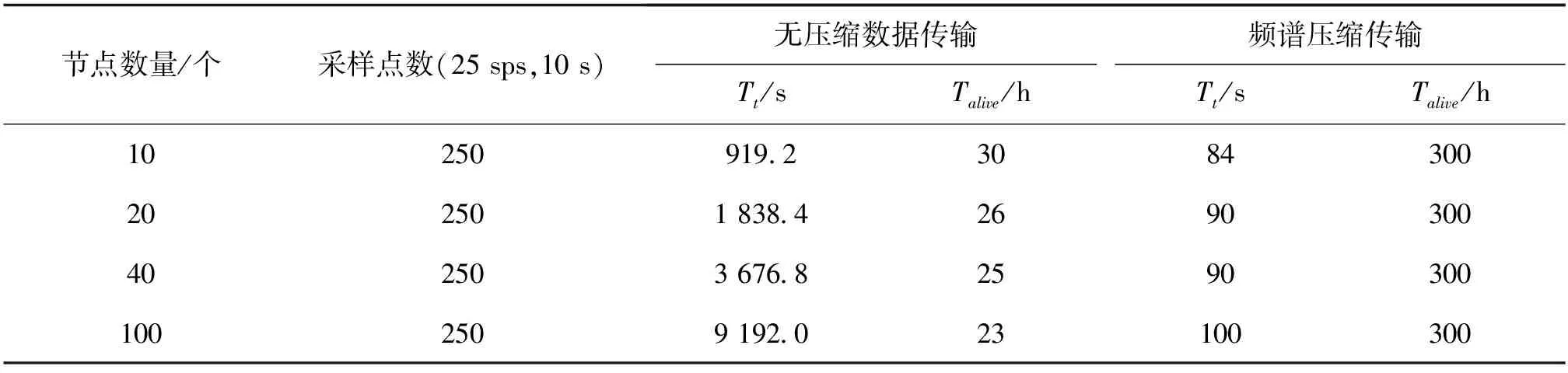
表1 有无数据压缩策略下不同节点数量存活时间对比
通信时间:Tt=∑Ti,i=0,1,…,N-1,Ti为云端服务器接收网络中所有节点的工作时间,包括该节点的数据采集时间;平均待机时间:Talive=∑Tj/N,j=0,1,…,N-1,Tj为单个节点的工作时间(1节18650工业电池电量3 000 mAh,充满电后的电压为3.5 V,电量全部释放结束为存活时间)。需要说明的是,每个节点在传输数据前需耗能压缩数据,不仅避免了直接将原始数据传输至云端导致的网络拥堵,还减少了数据传输的时间,延长了节点的工作寿命。
为了降低系统运行功耗,从硬件、软件、数据处理3个方面进行系统设计优化:一是从硬件系统优化设计,采用低功耗硬件,降低系统静态运行功耗;二是从软件系统优化设计,在满足工作要求的前提下适当增加休眠时间;三是从数据处理系统优化设计,尽量将数据处理放在前端,减少不必要的通信数据量,另外采用数据压缩算法,对必要传输的原始数据进行压缩,大幅度降低通信的数据量,从而降低通信功耗。本文采用TI公司的超低静态功耗电源管理系统进行电源设计,最终达到的静态功耗优于1 mW,有数据通信发生时,系统功耗优于150 mW。
2.3 传感器网络系统
索力监测系统体系分3层:第1层为布置在拉索上的MEMS加速度传感器节点组建的MESH网络层;第2层为边界路由Router,该Router将传感器网络层的数据进行聚合并传输至远程云端服务器;第3层为远程云端服务器,其负责对接收到的数据进行分析与存储。其中,整个网络系统结构示意如图2所示,传感节点系统结构示意如图3所示。传感节点系统通过6LoWPAN连接至Router节点,并实现从IPV6网络到IPV4网络的转换,使其直接进入Internet连接,实现物联网与互联网的无缝衔接。6LoWPAN网络技术以精简的IPv6为主要核心,使低功耗、低成本的传感器网络能够使用IP技术方便地连接到互联网中。
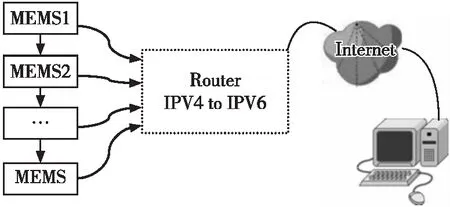
图2 基于MEMS加速的传感的网络系统结构

图3 3轴MEMS加速度传感节点电路系统结构
2.4 加速度传感节点硬件设计
2.4.1 加速度传感器电路设计
加速度传感器节点采用AD公司MEMS-ADXL335作为加速度传感器的核心,其内部结构显示如图4所示,Z轴加速信号调理模式如图5所示。
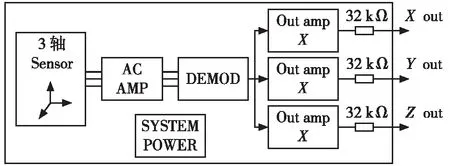
图4 MEMS加速度传感芯片内部结构示意
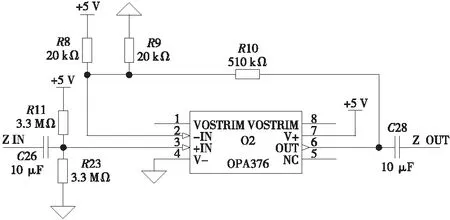
图5 MEMS加速度信号调理电路示意
2.4.2 AD转换器的电路设计
索的振动信号检测属于弱信号检测的范畴,对低频响应、灵敏度、数据采集速度、加速度传感器分辨率要求较高。A/D转换器使用1通道、24位ADS1255转换器,微控制器使用具有强大数据处理能力的32位PIC32MX795处理器,这种关系如图6所示。

图6 ADS1255与CPU的连接
3 索力监测系统试验验证
3.1 测量精度检定
为了检验该监测系统的测量精度,将其送至武汉市计量单位进行检定,检定结果如表2所示。从表2可知,该拉索智能监测系统识别频率与计量标准检定频率的相对误差约在-0.17%~0.2%之间,完全满足现场频率测试的要求。

表2 频率计量检定数据
3.2 通信测试
为了减轻每个节点的通信压力,设置每个传感器节点能够接收附近的节点的数量为20。由于加速度传感器的数据发送频率较高,数据量偏大,因此,边界路由的路由表最终稳定在45个节点数量,最大程度上保证系统稳定工作。
4 工程应用
目前,该索力测试系统已经在武汉月湖桥、石首长江公路大桥、武穴长江大桥、嘉鱼长江公路大桥等数座大桥中得到应用。以月湖桥为例,具体介绍该索力测试系统的应用情况。武汉月湖桥为独塔非对称双索面斜拉桥,主桥全长370 m,跨径布置为(232+75.4+34+28) m,塔高110.5 m,主梁高2.2 m,宽23.5 m,桥塔共设置104根斜拉索,主岸孔各26对。
为了验证该索力监测系统的测量结果的可靠性,在月湖桥上选取一根斜拉索,按照无控及设置拉索阻尼器2种工况,采用本文所研发的索力监测系统分别测量了拉索的自振频率,现场测试情况如图7所示。测量结果对比如下:

图7 月湖桥拉索索力监测
斜拉索无控时,拉索振幅较大,测点最大峰值加速度达到18.5 mm/s2,由加速度功率谱可知拉索前10阶自振频率清晰可见,根据频差法确定拉索振动的基频为1.024 Hz,如图8所示。
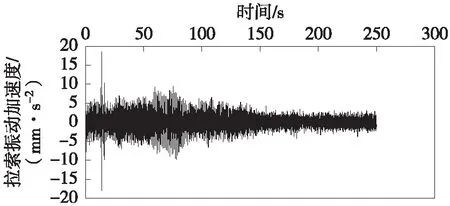
(a) 拉索振动加速度时程曲线
拉索安装阻尼器后,测点处峰值加速度仅为3.018 mm/s2,振动幅度大幅下降,但拉索前十几阶自振频率依然非常清晰,噪声干扰较小,根据频差法确定拉索振动基频为1.099 Hz,如图9所示。本索力测量系统采用大动态弱信号数据采集方法降低了测量系统峰值信噪比,非常有利于识别微弱振动信号中的有效频率成分和提高拉索的索力测量精度。
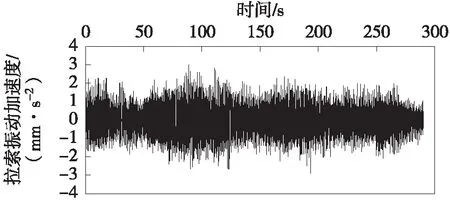
(a) 拉索振动加速度时程曲线
5 结论
本文研发了一种基于前端处理的拉索智能监测系统,分析了该系统的索力监测、振动监测及异常报警的功能,实现了监测数据低功耗、小成本的无线传输,并得出如下主要结论:
1) 研发的拉索智能监测系统既能进行拉索振动监测,又能实现对拉索在时域、频域振动响应的前端处理,大幅降低了健康监测系统的数据传输量,同时采用唤醒模式及6LoWPAN技术实现了监测数据低功耗、小成本及监测数据的无线传输。
2) 采用了大动态弱信号数据采集方法,提高了信号测量分辨率和测量系统峰值信噪比,有效识别了微弱振动信号中的有效频率成分,提高了索力测量的精确度。
3) 拉索智能监测系统的工作性能通过了实验室试验检定,其识别频率与计量标准检定频率的相对误差约在-0.17%~0.2%之间,并成功应用于武汉月湖桥、石首长江公路大桥、武穴长江大桥、嘉鱼长江公路大桥等多座大桥,具有较强的工程实用性,可推广应用。
猜你喜欢
军事文摘(2024年4期)2024-03-19
当代水产(2022年6期)2022-06-29
能源研究与利用(2022年1期)2022-03-03
装备制造技术(2021年5期)2021-08-14
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
振动工程学报(2015年1期)2015-03-01
西安建筑科技大学学报(自然科学版)(2014年1期)2014-11-12
振动工程学报(2014年2期)2014-03-01