
水下探测声呐在半潜式平台水下安防系统中的应用
2023-10-31 02:14:40杨贵光汪天伟
中国海洋平台 2023年5期
杨贵光, 胡 丽, 汪天伟, 陈 静
(1. 中海石油(中国)有限公司 海南分公司, 海南 海口 570312;2. 中船灵湖(昆明)科技发展有限公司, 云南 昆明 650000)
0 引 言
在所探明的新增油气储量中,海洋占据60%~70%,深海是油气资源的接替区。重视并大力发展我国的海洋油气行业,尤其是深海油气资源的勘探、开发和利用,是提高我国能源安全、提升综合国力的重要途径。然而,近几年在半潜式深水钻井平台油气勘探过程中,周边国家通过民船、伪装渔船的武装船只、海警等各种手段多次进行大规模骚扰。同时,水下无人潜行器、水下蛙人等水下装备和技术的快速发展对深海半潜式平台的安全也造成严重的威胁。因此,油气田水下安防系统的构想应运而生[1-3]。
尽管应用于浅海油田的水下安防技术已在我国起步,但深海海洋油气田水下安防专项技术仍处于空白状态,在该领域率先取得专利并形成技术、行业标准对占领国内、国际市场,具有先发优势。因此,对适用深海油气田的水下安防系统开展专项研究显得异常紧要和迫切。
水下目标的探测、识别与追踪等是安防系统的关键部分,根据传输介质的不同,分为声、光、电等3种探测技术[4],其中,声学探测技术基于声信号水下传播距离远的特点,可在浑浊、泥沙覆盖等水域环境干扰下,实现水下物体探测。由于无人水下运载器 (Unmanned Underwater Vehicle,UUV)、自动水下航行器(Autonomous Underwater Vehicle,AUV)和水下运载器(SEAL Delivery Vehicle,SDV)等水下航行器或蛙人具有体积小、航速低,以及噪声水平极其接近海洋背景的特点,被动声呐已无法探测,各国越来越重视对主动声呐的研究,例如应用于蛙人探测的声呐等[5]。英国Sonardyne公司研制水下哨兵系统,实现360°全方位探测,探测追踪距离远、误报率低。国内对小目标探测声呐的研究起步较晚,近几年来才取得很多成果和应用,如青岛奥帆赛的水下安保系统[6]。
因此,为助力中海油南海深水油气田的开发,本文将水下探测声呐技术应用于深水平台水下安防系统中,为深海油气田周围环境和目标进行主动探测和识别,对其安全运行具有重要价值。
1 必要性分析
目前,深海油气田安全面临的风险主要来自以下3个方面的破坏:
(1)工程作业:①海上船舶对油气平台主体结构的碰撞威胁;②海上特种施工船舶在作业、抛锚等过程中,对海底油/气/水管和光/电缆等设施的刮碰甚至破坏。
(2)自然因素:海上风、流和波浪等常规环境载荷伴随着海洋工程结构物的整个服役过程,另外结构物还面对热带风暴、海冰挤压碰撞、海底地形和地质变化、地震及其引发的海啸等不可预知的自然灾害。
(3)盗掠及敌特:石油企业能源开采的布局及投资力度不断加大将使其不得不面临长期存在的安全形势,尤其在与周边国家有海域争议的远海油气田区域(如东海、南海),存在恐怖组织、极端势力采用非常规手段[如船舶、水下航行器(AUV等)和蛙人等]进行故意破坏。
综合上述因素,有必要设计水下安防系统,该系统利用水下小目标声呐探测技术,完成可疑目标的感知,当目标进入限定范围后,激发报警,同时对目标活动特点进行有效探测、检测定位、特征识别、取证记录和警告驱离。
2 水下主动声呐探测方案设计
主要研究水下探测声呐技术在深水平台水下安防系统中的应用,因此其技术核心在于水下声呐探测。
声呐通过发射密集波束信号和接收回波数据形成声呐图像,实现水下目标探测,原理如图1所示。首先对多周期声呐图像进行灰度变换、直方图均衡化和特殊卷积滤波等预处理;其次经过OTSU自适应阈值分割与形态学膨胀腐蚀处理后分割目标与背景,并利用统计霍夫变换提取目标运动直线;然后结合卷积神经网络(Convolutional Neural Networks,CNN)[7]改进后的基于可变形部件模型(Deformable Parts Model,DPM)[8]的检测算法对声呐图像进行目标特征提取,实现探测目标的轨迹关联;最后以应用于各类目标中心的参数表示该目标,得到多周期图像中的轨迹点,绘制目标轨迹,实现目标的轨迹跟踪。

图1 声呐探测方案原理流程图
2.1 声呐图像预处理
对声呐图像进行预处理可更好地消除无用干扰,得到感兴趣的目标信息。
声呐图像的原始数据通常以多周期图像的方式显示,在本研究中时间周期窗口为32个,即将每个波束对应累计的32次数据叠加在一个图像块当中,并以先进后出的方式进行声呐数据更新。在本研究中波束数量为256,则该图像宽度为8 192像素,图像高度为将每次接收到的数据长度进行压缩后固定为300像素。图2为本研究在某次湖上试验时的时间历程声呐图像(由于篇幅原因,图2仅截取28个波束显示)。
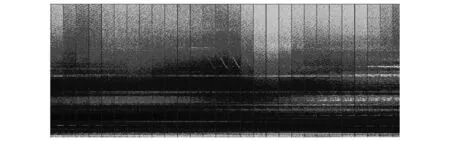
图2 时间历程声呐图像
假设声呐图像I的三通道表示为RGB,则预处理步骤如下:
(1)对原始图像I进行灰度化,得灰度图Igray:
(1)
式中:R、G、B为三通道图像。
(2)计算灰度图Igray的统计直方图,并进行直方图均衡化h图像增强,得到改善后的图像Ihist:
Ihist=h(Igray)
(2)
(3)采用式(3)所示的卷积核对每个波束的时间历程声呐图像Ihist做卷积处理,减弱或去除时间方向上的像素影响,增强垂直方向上的像素影响,为下一步去除固定目标和抑制噪声做准备。
(3)
2.2 运动目标检测
在声呐多周期图像中,目标呈现较明显的斜线或曲线,因此可通过检测直线来确定运动目标。霍夫变换是数字图像处理领域常用的直线检测技术,通常在使用霍夫变换之前,需要对图像进行阈值分割及形态学等处理,使直线特征更明显、检测精度更高。
2.2.1 灰度图像OTSU阈值分割
OTSU是自适应阈值分割算法,不受图像对比度等影响,其基于图像的灰度特性,使背景和前景像素差异最大化,从而自动获得分割阈值,本文用于将声呐图像的大面积背景与直线目标进行分割。
将图像Ihist所有N个像素按灰度级分为M级,Ni表示第i级的像素数量,则其对应直方图概率Pi为
Pi=Ni/N
(4)
设阈值T将所有像素分为2类,其中,直线类为S0={0,1,…,T-1,T},背景类为S1={T+1,T+2,…,M-1,M},令δ2为类间方差,则最佳阈值T′满足类间方差最大,即
δ2(T′)=max[δ2(T)],0≤T≤L
(5)
式中:L为像素灰度级。利用该阈值提取图像前景直线目标,对图2所示的声呐图像进行预处理后的结果进行OTSU分割,分割结果如图3所示,可见对固定目标和混响噪声的抑制作用效果明显,同时直线像素也被有效分割出来。

图3 灰度图像OTSU阈值分割结果
2.2.2 形态学处理
在经过OTSU阈值分割后的二值图像IOTSU中,仍出现噪声、边缘不规则和直线断裂等问题。因此,采用形态学算法做进一步处理,运算过程如下:先进行膨胀处理P,去除声呐图像的噪声,扩展图像有效区域,消除边界缺口,填充有效区域内部小孔;再进行腐蚀操作F,减少无效区域,有利于后期的直线提取。该过程可表示为
{IOTSU⊕P⊙F}
(6)
膨胀和腐蚀形态学处理后的效果如图4所示,可见经过膨胀后断裂的直线区域被有效填充,而腐蚀操作将绝大多数噪声剔除。

图4 形态学处理结果
2.2.3 霍夫变换直线检测
霍夫变换是检测直线常用的方法,其基本思想如下:将笛卡儿坐标系下的直线坐标映射至另一坐标空间下,得到参数坐标,然后利用参数坐标下点的数量确定直线。霍夫变换检测直线具体过程如下:
(1)假设极坐标r-θ下的直线表示为
r=xcosθ+ysinθ
(7)
(2)初始化数组array[r,θ]中所有数据为0,并遍历图像中每个非零像素点(x,y),遍历所有θ,按式(7)计算所有r,累加数组array。
(3)统计数组array的累加值,按照一定的阈值求取极大值点(r,θ),即对应图像空间中的一条直线。
由于目标的运动速度有限,不会在时间历程图像中出现垂直的直线。在常见运动轨迹下,与声呐距离纬度相切的情况少见,只会在较短的时间内出现在较少的几个波束中,并且无威胁。因此,遍历霍夫变换提取的每条直线,剔除斜率接近水平和垂直的直线,找出线段长度最长和较长的直线,保存斜率、波束号、距离相关信息。图4经霍夫变换后的直线检测结果如图5所示,其中,深色线条表示检测结果。

图5 直线检测结果
2.3 目标跟踪与轨迹提取
检测到运动目标后,需要继续执行目标跟踪和轨迹提取,实现目标的动态识别。
2.3.1 多周期图像轨迹提取
在实际应用中,目标通常出现在复杂背景中,提取的特征中容易混杂大量噪声,因此采用结合CNN改进后的基于DPM的目标检测算法对多波束声呐图像进行特征提取。算法详细流程如图6所示。

图6 目标运动特征提取流程图
首先,制作包含目标的正样本和未包含目标的负样本数据集。其次,将AlexNet卷积神经网络[7]的全连接层截断后获得前5个卷积层,形成不同尺度的特征金字塔,并通过迁移学习提取正负样本丰富的高层特征。然后,利用特征金字塔的每层特征训练含有隐变量的支持向量机。最后,获得可变形部件模型的局部和全局检测器。检测过程如下:(1)对测试图像构造局部特征映射图和全局特征映射图;(2)对局部特征映射图进行池化;(3)级联全局特征映射图得到新的特征映射图;(4)用训练后的支持向量机模型与特征映射图做卷积,得到检测结果。
其中,每个卷积层都包含数十甚至数百个卷积核滤波器,通过分析和评估,获得每个卷积核的性能优劣。其中定义的平均响应值评估标准(Average Response Amplitude,ARE)是为了评估每个卷积核滤波器对卷积模型的贡献。并且每个响应值可由被测卷积核滤波器计算后的特征映射统计得到,卷积核滤波器响应值的高低就说明其对模型的贡献大小。保留高ARE的卷积核滤波器,并减少低ARE的卷积核滤波器,可在保证识别准确率的前提下降低模型参数复杂度,有效提取目标的运动特征。
检测目标点之后,根据目标点的特征,按照一定的关联方法,将其归类至相应的目标下,经多个周期后形成目标轨迹。所进行的目标轨迹关联流程如图7所示,具体策略如下:
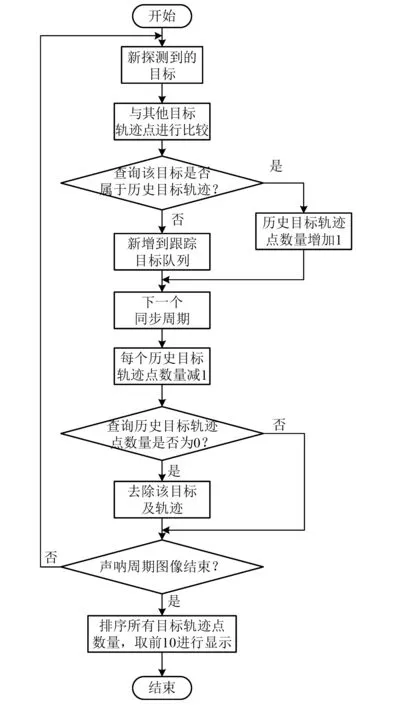
图7 目标轨迹关联流程图
(1)记录声呐探测到的可能目标及其轨迹,times为轨迹点的数量。
(2)在每个同步周期内,将每个历史目标的times减1,直至0,并将times为0的目标剔除目标向量。
(3)在每个同步周期完成运动目标提取后,将每个新目标与每个可能目标的最近目标轨迹点进行比较,主要比较斜率和距离,并且保证在同一个波束上;若满足条件则属于该历史目标,添加至该历史目标的轨迹点向量中,并增加times值;若不属于该历史目标则在目标向量中增加1个新目标。
(4)对目标按照times降序排列,取前10进行显示,将其绘制到多周期图像中。
2.3.2 目标跟踪轨迹绘制
在多周期图像中绘制的轨迹仅反映运动目标在该波束方位上距离维的运动,未得到方位维的运动趋势。一个运动目标在方位维上可能穿越多个波束,在多周期图像的多个波束上留下轨迹。采用如下方法提取方位维上的运动,得到完整的运动轨迹:
(1)将目标按斜率、波束号、距离进行聚类,将目标的轨迹点数作为权值。
(2)每类的中心目标即为目标点,通过其波束号、距离即可圈出目标。
3 应用与试验
3.1 试验环境
在中船重工集团公司七五〇试验场抚仙湖上进行拉距试验。水下声呐布放深度为70 m,一个试验目标为七五〇试验场自行研制的ROV,尺度约1 500 m×900 m×800 m,另一个试验目标为φ=300 mm的钢球,由玻璃缸拖曳,目标水深为50 m。
3.2 试验结果
对使用钢球拖曳时记录的数据进行回放处理,成功检测到目标,并跟踪绘制目标的运动轨迹,如图8所示。

图8 多周期图像轨迹
4 结 论
将水下探测声呐应用于深海油气田安防系统中,旨在对非法入侵的水下蛙人、潜行器、水下外来人员进行实时探测预警,保证深海油气田开发作业的正常进行。首先,对水下探测声呐在安防系统的必要性进行分析。然后,从声呐图像预处理、运动目标检测和目标轨迹跟踪等几个方面详细设计水下声呐探测方案。最后,对探测方案进行应用试验。结果表明该方案可在抚仙湖中有效检测目标并进行轨迹跟踪,验证了水下探测声呐应用于半潜式平台水下安防系统中的有效性。
猜你喜欢
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:52
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
海洋信息技术与应用(2020年3期)2020-08-24 07:25:10
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
小学科学(学生版)(2019年10期)2019-11-16 08:55:14
通信技术(2019年3期)2019-05-31 03:19:08
现代装饰(2018年5期)2018-05-26 09:09:39
电子测试(2018年6期)2018-05-09 07:31:54
声学与电子工程(2017年1期)2017-06-22 11:30:09
中国三峡(2017年2期)2017-06-09 08:15:29
