
手术机器人夹持力检测技术进展
2023-10-29 01:58:34崔潇以徐波张捷孙丽萍杜慧江
机器人技术与应用 2023年5期
崔潇以 徐波 张捷 孙丽萍 杜慧江*
(1 上海健康医学院医疗器械学院,上海,201318;2 中国医药教育协会,北京,100071;3 上海健康医学院附属周浦医院,上海;201318)
0 引言
力反馈是指采用传感器检测压力、振动等力学数据,然后将检测到的数据反馈给控制机构,以对执行机构进行精准控制。力反馈的前提是能够检测到力的大小。目前,在医疗机器人手术过程中,医生只能依靠视觉信息做出判断,在缺少反馈的情况下操作时可能会出现一些偏差。例如,打结时拉力偏大导致人体组织损伤,或者缝合时拉力不够导致缝合过松等问题[1-4]。在手术机器人的器械前端如夹钳上应用力检测技术,可以在手术中使医生感觉到不同人体组织的不同特性,进而可以辨别出人体组织种类,使医生在做手术时感觉不是在操作机器,而是在用自己的双手做手术[5]。因此,手术机器人力传感器的研究有广阔的应用前景[6]。
本文对全球科学信息网络(Web of Science)、爱思唯尔学术文献平台(Science Direct)等国外著名数据库中有关手术机器人夹持力检测技术的相关内容进行检索,阐述现有的6 种实现手术机器人夹持动作检测技术的相关情况。
1 研究现状
2017 年,中国澳门大学YANG 等开发了一个用于生物医学领域显微操作的新型微机电系统微型夹钳,如图1 所示。该夹钳的尺寸为5.5 mm×6.0 mm,其左右两侧分别具有驱动夹钳开合和进行力检测的能力。其中,左边的驱动部分选用静电梳齿驱动器,连接4 个簧片驱动左臂进行抓取;右侧集成了电容传感器进行力检测,通过检测夹钳引起的传感器位移导致的电容变化,计算得出压力数值。得益于传感器的结构设计,夹钳通过一个传感器就可以检测到两个相互垂直方向上的力的大小。该力传感器的分辨率为0.58μN,可以检测的力范围是0~98.27μN。在两个互相垂直的方向上,检测灵敏度相差了6 倍,未来可针对这一特性进行改进,以达到两个方向的检测灵敏度相对接近。在针对生物医学样本的抓取力检测实验中,该微型夹钳夹持力检测功能表现良好,后续有望应用于显微外科手术设备中[7]。
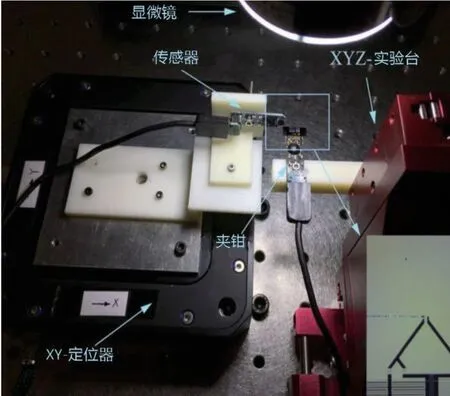
图1 微型夹钳夹持力传感测试的实验装置
2018 年,韩国成均馆大学KIM 等提出可用于微创手术的电容传感式手术夹钳,如图2 所示。该手术夹钳安装在机械臂前端,整体尺寸长×宽×高为20 mm×4.6 mm×1.5 mm,包含两片钳口。力传感器由一个L 形状的PCB 电路板和电容传感单元组成,位于夹钳下颚处贴近钳口的近端区域。在夹钳的钳口和 PCB 电路板上的检测单元之间有两个长度为0.1mm 的间隙。当夹钳的钳口受力时,间隙的变化会引起电容值的改变,进而可以进行受到的力的大小检测。夹钳外壳由铝合金制成,保护夹具不受电磁干扰,同时具有良好的导电性。夹钳前端10mm 区域内带有微型齿状结构。实验表明,该夹钳可检测的力范围是0.51~4.2 N,在X、Y、Z 轴3 个方向上的检测分辨率分别是3.8 mN、1.8 mN、2.0 mN。该款夹钳未来有望应用于机器人手术中,可以在机器人手术期间实现进一步增强虚拟空间的现实感和逼真感,更加安全快速地执行手术任务[8]。
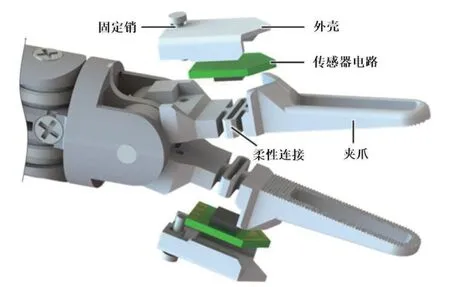
图2 电容传感式手术夹钳
2018 年,东京医科齿科大学TAKIZAWA 等设计了使用气动通道驱动的软质夹钳,如图3 所示。该气动软质夹钳整体由硅树脂制成,其后部通过活塞连接一个充满空气的腔室,给由硅树脂制成的腔室内充气,可以驱动前方的软质夹钳执行夹持动作。该软质夹钳内部装有应变计,可测量钳口的位移。通过测量应变计位移和腔室内部压力来估算夹持力的大小。利用内置应变器测量腔室的膨胀长度,当空气流入管道时,气缸内的活塞受到来自软致动器的挤压而膨胀,腔室中的活塞被挤压,推动夹钳打开;当通过管道抽气时,活塞拉回,夹钳闭合。夹钳钳子的开合角度可通过改变压力来调整。该夹钳的尺寸为34mm×9mm×9mm,夹持力检测范围为0.1~0.25N[9]。
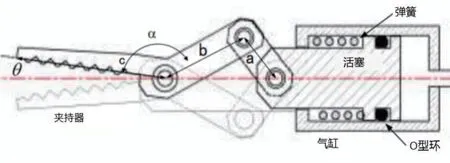
图3 使用气动通道驱动的软质夹钳
2018 年,哈尔滨工业大学于凌涛等设计了一种前端含有弹性敏感元件的手术夹钳,传感器集成在夹钳前端,可检测3 个轴向力,如图4 所示。该设计在不锈钢制的夹钳后方,固定了互相垂直的两个E 形弹性敏感元件,即应变力检测传感器,可以敏锐地检测到由薄片制成的E形弹性敏感元件的变形程度。经过解耦算法,将两个垂直方向上的力计算得到三维轴向上的力。通过实验分析,该夹钳抓握力的检测范围为0~2.5N,3 个轴向的力的检测分辨率分别为11mN、1.1mN、66mN。该夹钳外形尺寸为36.15mm×11.2mm×7mm,未来可优化三维传感力的动态试验,尝试在手术机器人中实现应用[10]。
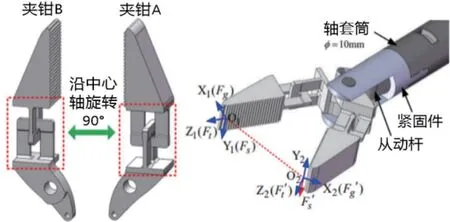
图4 前端含有弹性敏感元件的手术夹钳
2019 年,合肥工业大学王正雨等设计出基于人工神经网络估算夹持力的检测方法,设计了可以对单个轴向的力进行测量的神经网络传感器。使用该传感器的手术夹钳原理如图5 所示。人工神经网络学习能力较高,能够进行并行计算,同时可以将任何函数拟合到任意的精度。该方法采用了粒子群优化—反向传播神经网络(Particle Swarm Optimization Back Propagation Neural Network,PSO-BPNN),它是一种有监督的人工神经网络,可广泛用于非线性和非凸函数的逼近。该夹钳由线缆驱动,不需要传感器的参与就可以直接估测力值。根据电机和位移、速度变化和线缆张力的变化程度,使用仪器检测钳子的夹持力或碰撞力,获得训练数据,然后利用神经网络不断学习,通过每次最优迭代的实验过程优化模型,能够较好地解决在训练学习过程中产生振荡、慢收敛和局部极值的误差问题,良好地估测驱动线缆的张力大小,从而得出夹钳力的大小。通过4892 次的训练和544 次的测试可得出:夹钳的夹紧力最小检测幅度110 mN,平均误差在-0.0722~0.2525N,有效力的检测范围在0-2N[11]。
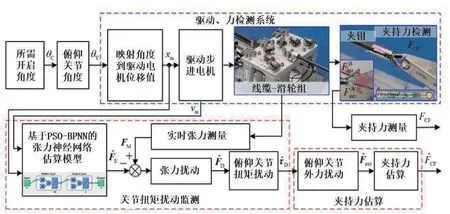
图5 手术夹钳原理图
2021 年,天津大学孙凯等设计了一种能够测量夹持力的内嵌光纤布拉格光栅结构的夹钳,如图6 所示。该传感器位于夹钳前端,长度为20mm,宽度为6.25mm,厚度为5mm,采用八角形桥型刚性链接的结构形成弯曲铰链。该夹钳由主轴、内部钢轴和远端传感抓钳装置组成,夹持器整体直径为12mm,长度为210mm,可检测力的范围是0~10N。夹持器内嵌的光纤布拉格光栅结构传感器对夹持力的检测分辨率为17.8mN。当夹钳夹持组织时,内嵌的光纤布拉格光栅结构会因为不同方向和程度的扭曲引起水平形变,水平形变引起光纤布拉格光栅结构产生内轴形变,从而可以计算得到夹钳的夹持力。在动态测量实验过程中,该手动夹持器的平均误差为0.1247N,标准差值为0.0883N。在进行不同硬度的试验测试中,该传感器对于不同硬度的材料,有良好的区分能力[12]。
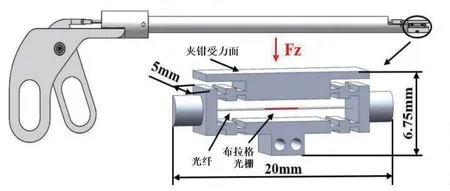
图6 内嵌光纤布拉格光栅结构的夹钳结构
2 研究分析
本文阐述了6 种夹持力检测技术的相关情况,具体如表1 所示。
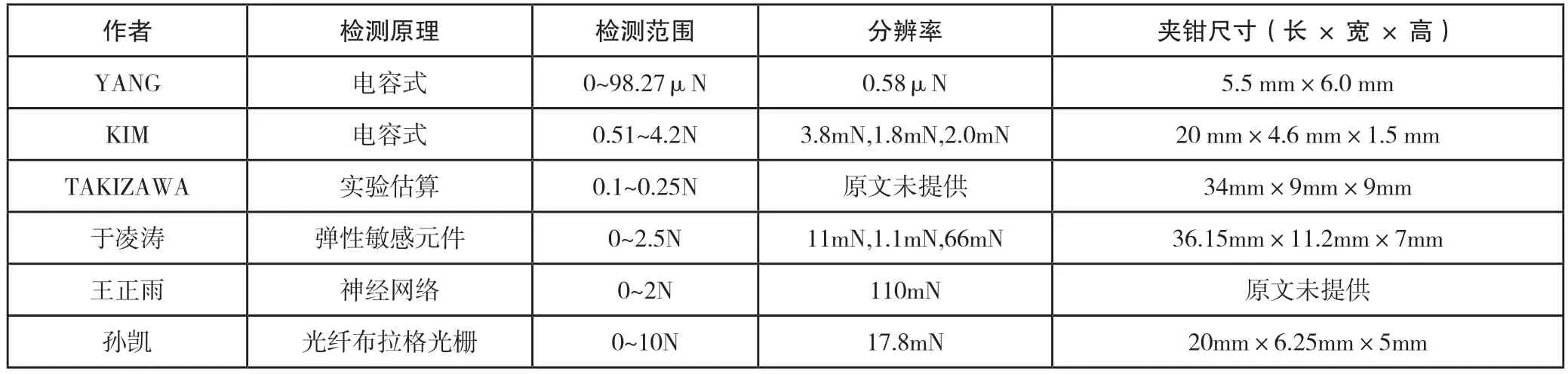
表1 6 种夹钳力检测技术情况
YANG 等提出的新型微机电系统微型夹钳,含有一体式的夹钳传感器,其尺寸小、检测分辨率高、力检测范围较小,侧重于显微生物学方向的应用场景。
TAKIZAWA 等提出的软质夹钳适用于一些如神经修复术等特殊的手术场景,但是其在小范围内使用线性模型估算夹持力的精度和范围都有限,需要后续提升性能。
KIM 等提出的电容传感式手术夹钳,通过电容式传感器测量电极板间距离变化,将距离数据转化为电容变化,计算出力的大小。该方法成熟、精度高,可以解析三轴方向的力,分辨率也是6 种技术中最高的。但是,对于应用于病人体内时传感器的封装是否能保证静电屏蔽和手术机器人本身的抗电磁干扰,以及器械消毒过程面临的高温或者化学腐蚀等问题,如果能考虑周全并通过实验测试,会有较好的应用前景。
于凌涛等提出前端含有弹性敏感元件的手术夹钳,将弹性敏感元件集成在夹钳的前端,灵敏度高,可以检测3 个轴向的力,但是两个互相垂直的弹性敏感元件作为应变梁,其结构强度是否足够应用于实际手术尚有待验证。互相垂直且带有开孔的应变梁需要进行封装,否则容易在手术过程中被污染,可能会影响测量结果。
王正雨等提出的PSO-BPNN 神经网络结构传感器,将驱动线缆上的拉力数值经过神经网络的学习后,可以给出夹钳夹持力的估计值,该方法可以很好地兼容广泛应用的传统夹钳,不需要安装传感器,也没有屏蔽和电磁干扰等问题。力估算的精度是其有待解决的主要问题,需要大量的数据进行训练,并且训练环境与应用环境之间的差异会造成误差增大。
孙凯等提出的内嵌光纤布拉格光栅原理传感器结构的夹钳,基于光信号的力传感器,通过敏感光纤的相互作用,解算出力的大小,测量精度虽然较电容式传感器低,但是其结构简单、检测范围广,没有电子元件,因此无需考虑绝缘、电磁干扰以及化学消毒过程的腐蚀性等问题。笔者认为其是最具有发展和应用前景的医疗机器人夹钳力检测技术。
3 结语
在本文阐述的6 种力检测技术中,有传感器的直接检测技术和无传感器的间接检测技术,各自有其优势和不足。随着技术的发展,将神经网络算法弥补光纤布拉格光栅技术有机结合起来的检测方法,可能将会得到大力发展。
猜你喜欢
锻造与冲压(2024年5期)2024-03-27 08:01:08
锻压装备与制造技术(2022年1期)2022-03-24 13:22:58
计算机仿真(2021年9期)2021-11-17 12:04:34
装备制造技术(2020年2期)2020-12-14 03:09:36
科学与信息化(2020年23期)2020-09-06 14:15:55
制造技术与机床(2018年11期)2018-11-23 01:08:04
传感技术学报(2017年2期)2017-04-13 09:19:18
传感器世界(2016年11期)2016-03-25 08:09:04
电源技术(2015年1期)2015-08-22 11:16:20
电源技术(2015年7期)2015-08-22 08:48:50
