
一种蛇形管道机器人结构设计及运动分析
2023-10-29 01:58李银苗云龙李奇
机器人技术与应用 2023年5期
李银 苗云龙 李奇
(韶关学院,广东韶关,512005)
0 引言
管道是生产生活基础设施建设中必不可少的部分。随着社会的发展,管道建设越来越多,为了解决阻塞、裂纹、清污等问题,从内部或外部以排水管道疏通机器人代替人工的方案有较大的市场发展潜力。国内蛇形机器人研究起步相对较晚,核心技术也比较落后,排水管道机器人也没有很多成功的案例[1]。
清华大学研发的四轮驱动管道清淤机器人,具备充足的动力,采用无线设备,其头部安装有CCD 摄像头。实验阶段,该机器人在空载、干净的管道中功率可达350-400W,平均速度可达5.8m/min,一次性可清除60kg重的淤泥,适用于淤泥较少的管道,但是当淤泥厚度超过管径的1/3 时,其速度会有所下降,甚至出现打滑现象。该机器人还装有姿态检测装置,可在管道内平稳运行,一般可应用于直径400mm 以上的排水管道[2]。
上海交通大学研制了一款履带式管道机器人,其设计灵感来源于履带式车辆的行走。该机器人的履带通过功率5W 的直流伺服电机驱动,再由减速比1:100 的齿轮减速箱进行调整,达到输出转速0-30r/min 。该机器人采用无线通信,配备的CCD 图像传感器和角度传感器,主要用于检测管道环境和机器人在管道内运行时的运动姿态;配备的伺服电机可让传感器做上下运动,扩大了机器人的检测范围[3]。另外,两个履带反向运动控制机器人的原地转向,这一设计解决了在大曲率半径管道的转弯难题。
国内现有的管道疏通机器人多为轮式和履带式,这类机器人在管道内作业时,若出现侧翻、卡死、驱动力不足等问题时,会直接导致机器人无法继续工作,而且回收也比较麻烦[4]。而蛇形机器人作为仿生机器人的一种,其优点是具有多步态运动能力,能够适应复杂多变的管道环境,进行管道检测与管道疏通,并且多支撑点的优点不会出现像轮式与履带侧翻等状况。故本文设计了一种蛇形管道机器人结构,并对其进行运动分析。
1 蛇形管道机器人结构设计
1.1 躯干设计
蛇类生物是一种无肢动物,它的肋骨前后不仅可以自由的移动,肋骨与腹鳞之间还有肋皮肌相连,所以当肋皮肌收缩时,肋骨便可以向前移动,所以若要让机器人模仿蛇类运动,机器人关节的设计尤为重要,蛇形管道机器人单节躯干模型如图1 所示。
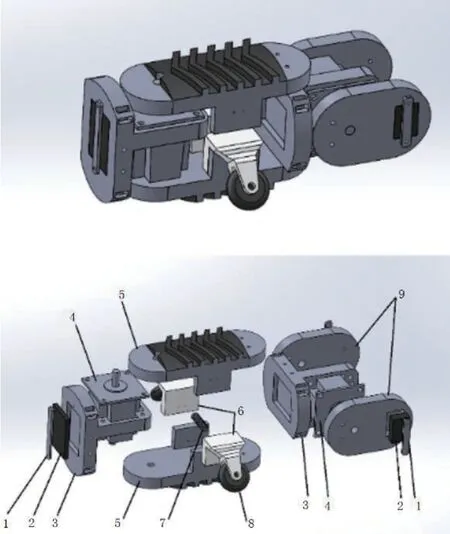
图1 蛇形管道机器人单节躯干
本文设计的蛇形管道机器人采用57两相步进电机(双出轴),电机边长为57mm×57mm,具有结构简单、可靠性高、经济耐用、高速、力矩大、低噪音、运行平稳等优点。其双出轴的设计可以使机器人运动时均匀受力,电机参数如表1 所示。

表1 电机参数
蛇形管道机器人的躯干由步进电机固定件、57 两相步进电机(双出轴)、上下两个关节外壳、第二个步进电机固定件、第二个57 两相步进电机(双出轴)、两个关节连接件依次相连。不同两组单节躯干的关节连接件与步进电机固定件依次相连接来实现躯干单元体之间的连接。同一躯干单元内有两个57 两相双出轴步进电机,可使一个躯干单元实现两个自由度的转动,多个躯干单元相互配合实现机器人的运动。上下两个关节外壳作为躯干的骨架,其外表面为橡胶材质,为了模仿蛇类运动的真实效果,其纹路设计为波纹状,以增加与管道的摩擦力。磁铁安装在步进电机固定件和关节连接件上,由挡片固定。在下水管道内作业时,蛇形管道机器人还可在疏通管道的同时用磁铁吸附管道内的残留金属,以达到金属回收的目的。在与地面接触的机器人关节外壳的两侧,装有从动轮固定件,从动轮固定件上装有橡胶从动轮,不仅可以起到支撑作用,维持机器人的平衡,还可以使机器人在运动时限制除了与轮子平行方向摩擦力以外的摩擦力,使机器人运动速度更快。
1.2 头部设计
躯干的作用主要是实现蛇形管道机器人的运动,而头部的作用则是实现管道疏通与管道检测。蛇形管道机器人头部机构设计如图2 所示。

图2 蛇形管道机器人头部机构设计
蛇形管道机器人头部的破碎装置安装过程为:将破碎钻头、钻头连接件、主动伞齿轮以及头部电机按图2中的顺序依次连接在蛇形管道机器人头部骨架上,4 个从动伞齿轮外侧安装切割盘,内侧与头部骨架相连,并与主动伞齿轮啮合;破碎装置工作时,电机旋转,与电机相连的主动伞齿轮旋转来带动4 个从动伞齿轮旋转,从而带动切割盘,破碎钻头与切割盘同时高速旋转(破碎钻头与切割盘材质为合金),完成破碎工作。
探测灯与监控摄像头安装在蛇形管道机器人头部骨架上,用于将实时画面传递给检测人员。其由透明挡板包裹,防止被污渍影响。关节连接件将头部骨架与躯干连接在一起。高压水枪载架用来装载高压水枪,搭载了高压水枪的机器人可以借助高压水枪使管道内堵塞物顺着水流流出管道。
1.3 尾部设计
蛇形管道机器人蛇尾部分由蛇尾、尾部连接体组成,具体如图3 所示。

图3 蛇形管道机器人尾部设计
蛇尾内部装载有STM32 单片机、内置电源、MD542步进电机驱动板、Wi-Fi 模块、气压传感器、温度湿度传感器、MPU6050(陀螺仪)等,并将它们放入封装盒进行封装散热处理。
各外围传感器设备的用途具体如下。
1)步进电机驱动模块负责接收来自STM32 单片机的控制信息,高效且低延迟地对蛇形管道机器人全身的电机进行控制。
2)气压传感器用于获取管道环境中的大气压强以及海拔高度。
3)温度湿度传感器分别负责检测封装盒内、外的实时温度,通过内部温度可以知道内部元件是否存在过热工作的异常情况;外部温湿度可以了解管道环境中的温湿度情况。
4)陀螺仪传感器用于读取蛇形管道机器人的运动姿态,如航向角、横滚角、俯仰角,从而便于实时调整机器人的运动方向和运动姿态,有效提升机器人对管道环境的感知能力。
蛇形管道机器人结构参数如表2 所示,其装配图如图4 所示。
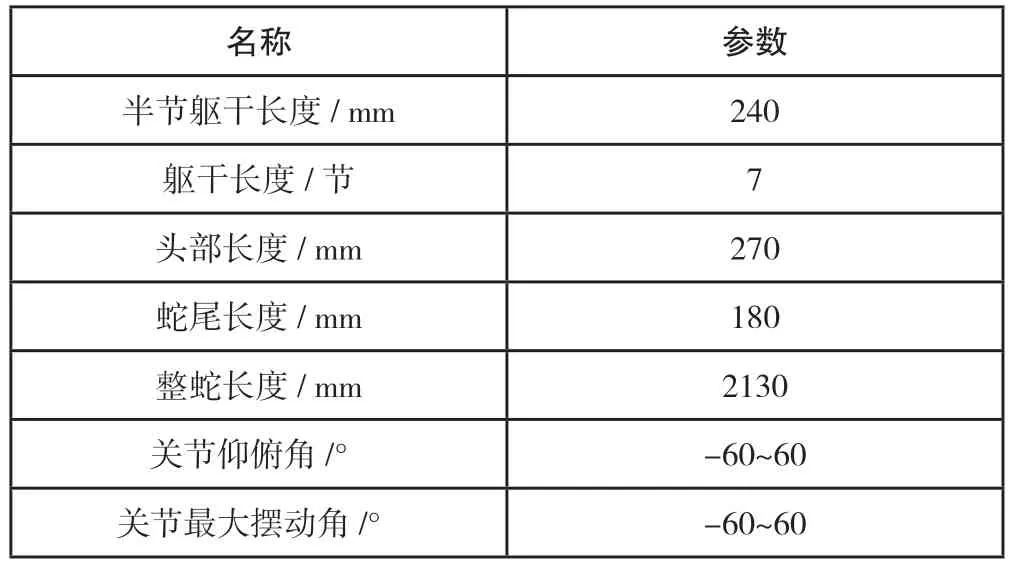
表2 结构参数

图4 蛇形管道机器人装配图
2 蛇形管道机器人蠕动运动规划及仿真
蛇形管道机器人在管道内工作时,其前进方式主要是蠕动前行,本节将对这一蠕动运动模式进行运动学规划,并对其用仿真软件Adams 进行运动学与力学仿真。
2.1 蠕动过程步态规划
蛇形管道机器人的蠕动过程中,一个关节的推进波形可以简化为若干个周期性的、幅度不同的摆动,即平滑多段的正弦函数。相邻关节的函数仅有相位不同。
蠕动的过程可以分为3 个阶段。
1)形成三角波。通过电机驱动控制关节点1、2、3(图5 所示)的电机旋转,使得蛇形管道机器人关节点2 拱起形成三角波。本文所设计的机器人向后的摩擦系数较大,形成三角波时使得尾部前移。
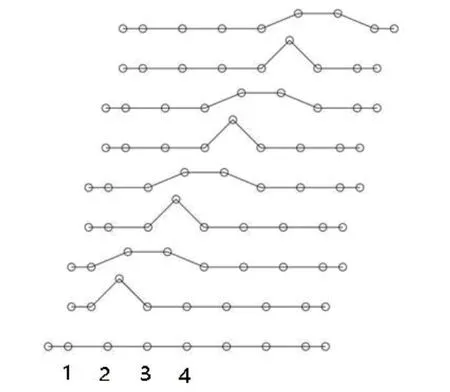
图5 蠕动一次的过程
2)形成弓形波。通过电机驱动控制关节点1、2、3、4 电机的旋转,使得三角波的波峰由关节点2 向关节点3过渡,图5 所示是推动蛇形管道机器人整体向前移动的过程,同时拉动尾部前移,此时,蛇形管道机器人会再次向前移动一段距离。
3)形成新三角波。蛇形管道机器人的躯干关节由弓形波转为新三角波后,不断循环以上过程,直到最后恢复为一条直线,完成一整套蠕动的过程。
蛇形机器人单节躯干的运动过程可以用函数表示:
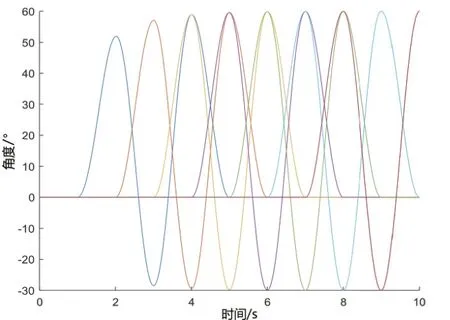
图6 α=30°λ=1 时单节躯干的角度时间函数
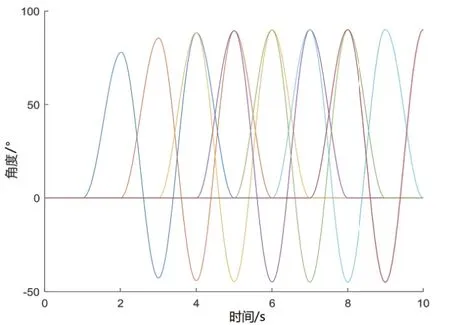
图7 α=45°λ=1 时单节躯干的角度时间函数
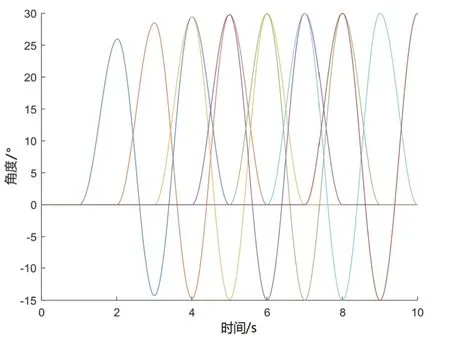
图8 α=15°λ=1 时单节躯干的角度时间函数
2.2 Adams 软件仿真
2.2.1 建立简化模型导入Adams
在SolidWorks 软件中建立蛇形管道机器人的简化模型。将简化后的三维模型导入Adams 软件中,设置蛇形管道机器人的关节数为8,单节重量为1.06kg,添加约束、运动副、驱动、摩擦力等参数,最后写入驱动函数,完成蛇形管道机器人的仿真模型的建立。
2.2.2 运动仿真
假设蛇形管道机器人在零时刻各个关节角度均为0,即直线状态,利用Adams 软件仿真可得到其蠕动过程,如图9 所示。蛇形管道机器人尾部沿前进方向的时间位移曲线如图10 所示,经过4 次蠕动循环后,蛇形管道机器人整体前进了0.58m,平均每个蠕动循环前进了0.145m。
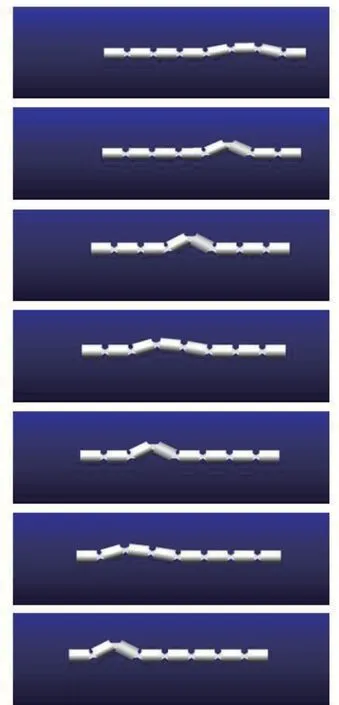
图9 三角波形推进时的蠕动过程

图10 蠕动时的尾部位移曲线
2.2.3 力学分析
笔者团队将所选用的电机装配到蛇形管道机器人的关节中,然后计算出关节的质量、转动惯量等信息,设置摩檫力,添加重力、接触等约束,对蛇形管道机器人蠕动前进时所需要的关节力矩分别进行仿真分析,由Adams 软件后处理模块得出的图像可得,蛇形管道机器人在蠕动过程中,中间关节所需要的力矩最大,其仿真结果如图11 所示。从图中可以看出,蛇形管道机器人蠕动运动时所需的最大力矩约为2.03N·m,而57 两相步进电机静力矩为2.4N·m,所以电机的力矩足够支持蛇形管道机器人的运动。
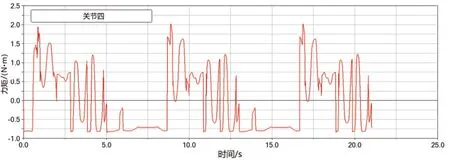
图11 蠕动过程中中间关节所需力矩图
3 蛇形管道机器人控制系统设计
3.1 控制系统介绍
在控制方面,蛇形管道机器人采用STM32 作为主控单片机,其控制系统原理如图12 所示。
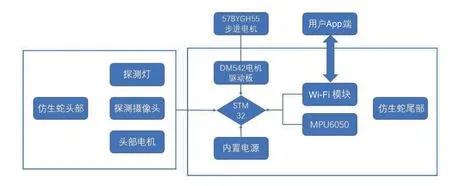
图12 蛇形管道机器人控制系统原理图
蛇形管道机器人头部安装有头部电机、探测灯、探测摄像头。其中,头部电机安装于蛇形管道机器人头部最前端,与钻头相连,主要用于疏通管道;探测灯安装在探测钻头的后上方,主要是在探测前进时进行照明;探测摄像头安装在探测钻头的后上方,主要用于将图像实时上传到主控系统,使得蛇形管道机器人具备自主识别特定目标的能力,如对于管道中堵塞的地方,必要时还可以将图像实时回传到外界控制端,以便在特殊情况下方便操作员根据回传图像做出判断并进行相应的操作。
蛇形管道机器人尾部安置有STM32 单片机、内置电源、MD542 步进电机驱动板、Wi-Fi 模块、MPU6050 陀螺仪等。其中,STM32 单片机相当于人类的大脑,用于处理如MPU6050 陀螺仪等传感器采集到的数据,并迅速做出反应,具有集成度高、性能强、功耗低等优点;内置电源用于给STM32 单片机和MD542 步进电机驱动板供电;MD542 步进电机驱动板用于驱动57BYGH55 步进电机;Wi-Fi 模块的作用是将STM32 单片机处理后的数据发送给用户App 端;MPU6050(陀螺仪)模块用来获取蛇形管道机器人的运动姿态;57BYGH55 步进电机控制模块负责接收来自 STM32 的控制信息,可高效、低延迟地对蛇形管道机器人全身步进电机进行控制。
3.2 蛇形管道机器人配备的App 软件
给蛇形管道机器人配备了相应的App 软件,其界面可分为登陆界面和功能界面。
1)登录界面:如图13 所示,输入正确的账号和密码即可登录蛇形管道疏通机器人系统。

图13 App 软件登录界面
2)功能界面:如图14 所示,该界面分为两个部分,上面部分用于数据显示,主要用于显示传感器采集到的各种数据,如MPU6050 模块的俯仰角、航向角、横滚角等;下面部分用于运动控制,主要用于控制蛇形管道机器人的运动,可以通过按键改变蛇形管道机器人的运动方式,也可以通过对应按键调整蛇头以及蛇身的姿态。
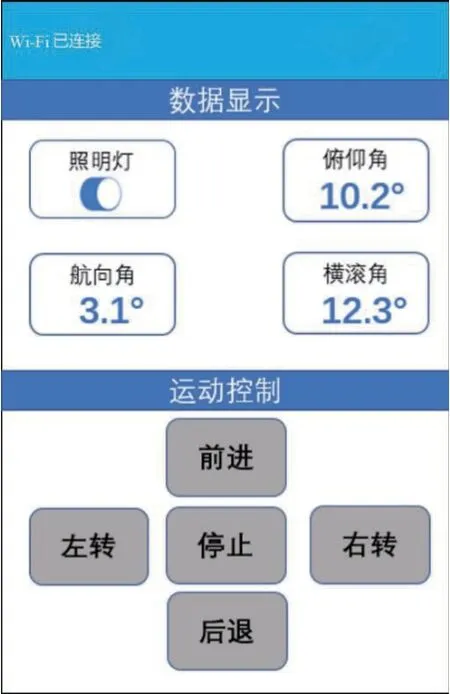
图14 App 软件功能界面
4 结束语
1)蛇形管道机器人是一种高冗余自由度的运动机器人,利用其代替传统的轮式或履带式管道机器人,可避免轮式或履带式机器人翻车之后无法继续工作的缺点,其可以利用蠕动这一运动方式很好地在管道中运动。
2)本文通过 SolidWorks 软件对蛇形管道机器人进行结构设计,并对蠕动这一步态的运动方式进行规划。
3)建立蛇形管道机器人的化简模型后,然后将其导入Adams 软件进行运动学及力学的仿真,最后得出了蛇形管道机器人蠕动一个循环能前进0.145m,关节最大力矩为2.03N·m,验证了结构以及电机选型的合理性。
猜你喜欢
军事文摘(2021年18期)2021-12-02
基层中医药(2021年1期)2021-07-22
军事文摘(2020年22期)2021-01-04
诗选刊(2019年9期)2019-11-20
中国特种设备安全(2018年10期)2018-12-18
电站辅机(2017年3期)2018-01-31
金色年华(2017年13期)2017-04-04
天津医科大学学报(2015年2期)2015-12-22
医学研究杂志(2015年8期)2015-06-22
中国康复理论与实践(2015年7期)2015-05-09
