
基于多惩罚因子优化VMD的滚动轴承故障特征提取方法
2023-10-29 14:18胡哿郗石剑钧刘恒畅
系统工程与电子技术 2023年11期
李 波, 胡哿郗, 石剑钧, 刘恒畅, 洪 涛
(1. 电子科技大学航空航天学院, 四川 成都 611731; 2.飞行器集群智能感知与协同控制四川省重点实验室, 四川 成都 611731)
0 引 言
滚动轴承因其摩擦阻力小、功率消耗小和机械效率高等特点,被广泛应用于航空发动机[1-2]、铁路运输设备[3-4]以及大型工业机械设备[5-6],承担动力传递和动力转换的任务,是机械发生故障的主要故障源之一[7-8]。由于滚动轴承的健康状态直接关系设备的安全稳定运行,因此及时发现关键滚动轴承中存在的故障,对确保机械安全稳定运行具有重大意义[9]。通常情况下,机械设备运行状态的变化可通过其动态信号(例如振动信号)进行有效反映,利用信号处理技术分离出其中隐藏的故障特征信息。然而,其动态信号中蕴含了复杂机械结构中各个部件产生的信号成分,而且不可避免地存在背景噪声,导致其中的故障特征信息被干扰成分淹没。同时,滚动轴承复杂的工况使得动态信号表现出调频、调幅等复杂的时变特性,提高了提取其故障特征信息的难度[10-11]。由于上述轴承工作环境的特点,如何在复杂噪声环境下有效提取滚动轴承故障特征变得非常关键。
迄今为止,学者们提出了多种信号处理技术提取滚动轴承振动信号中的故障特征信息,而最有效的则是基于时频域的信号处理技术。研究初期,小波变换被应用于滚动轴承的故障特征提取中,实现了对信号时频变化特性的分析,但其变换效果极其依赖经验选取的小波基函数[12]。为此,Huang等[13]首次提出了一种自适应时频处理的经验模态分解方法,合理解决了小波变换存在的“基选择”经验依赖问题,但其同时也存在端点效应和模态混叠的缺点。在此基础上,Wu等[14]提出了集成经验模态分解,有效地解决了经验模态分解存在的模态混叠现象,但该方法存在一个白噪声选择问题,易出现分解效果不佳的情况。进而,Dragomiretskiy等[15]提出了变分模态分解方法,相比于集成经验模态方法具有更好的信号局部性能和更优的噪声抑制能力,但也存在分解过程中参数难以设定的缺点。
为了解决变分模态分解中参数难以确定的问题,学者们陆续开展了相应研究。王奉涛等[16]提出通过分解信号的能量差值来确定分解层数。毕凤荣等[17]提出通过计算分解后各个本征模态函数(intrinsic mode function,IMF)的中心频率差值来确定分解层数。李华等[18]提出通过最大峭度原则优化分解层数。然而,上述研究只优化了变分模态分解(variational mode decomposition, VMD)分解层数和惩罚因子中的一个,没有全面考虑到这两个参数之间的相互作用对分解效果的影响。为此,程军圣等[19]以正交低峰值为优化目标函数,利用萤火虫算法对分解层数与惩罚因子进行联合优化。唐贵基等[20]提出以信号包络熵作为粒子群算法的优化目标函数对参数进行优化。Xu等[21]引入Teager能量算子并结合最大峭度系数和平均峭度系数优化分解层数和惩罚因子。虽然上述研究实现了VMD分解层数与惩罚因子的自适应设定,解决了需手动设置参数的问题,但没有考虑IMF各个分量对应的惩罚因子αk对VMD结果的影响。因此,郑圆等[22]利用智能算法确定了分解层数和多惩罚因子αk,然而其在建立优化目标函数时,只考虑了分解后信号与原始信号的时域差异,无法有效地反映分解后信号包含原始信号的信息完整度。由此可见,当前利用VMD提取滚动轴承的故障特征时,其预先设置惩罚因子具有不确定性的问题并未得到合理解决,仍存在较大提升空间。
因此,本文提出一种基于多惩罚因子优化VMD的滚动轴承故障特征提取方法。首先,构建了融合皮尔逊相关系数、时频谱相似度以及最大峭度值的优化目标,然后,通过最大峭度准则优化其分解层数,再利用灰狼优化(grey wolf optimization,GWO)算法获取最佳分解层数以及最佳分解模态函数,保证了分解后模态函数最大限度地包含原始信号的故障特征信息,提升了滚动轴承振动信号经提取后故障特征的显著性。最后,利用公开数据集分析验证,通过对比多种不同方法,得出本文所提方法的故障特征提取效果优于其他同类方法,证明了该方法的有效性。
1 算法基本原理
1.1 VMD算法分解原理
VMD非递归式地将具有多个频率成分的实信号分解为多个本征模态函数uk,并求得每个uk的单边谱,同时对每个uk进行调频,最后添加约束条件得到一个带约束的变分模型[23]:
(1)
式中:ωk是假设分解得到的各阶模态分量的频率中心;uk是第k个IMF模态分量;f是原始信号;δ(t)为一脉冲函数。
通过拉格朗日函数将上述问题转化为无约束变分问题[15]:
(2)
式中:α为惩罚因子;λ为拉格朗日乘子。再利用交替乘子方向算法求解,更新各IMF分量的中心频率以及带宽[15]:
(3)
(4)

1.2 GWO算法原理
GWO算法将灰狼种群捕食活动中的追踪、接近、围捕以及进攻行为模拟运用到算法搜索寻优过程中,其种群将个体分为4个等级:α、β、γ和ω。通过前3种最好的个体α、β、γ引导群体向猎物方向(即最优解)靠近,该算法原理比较简单。相比其他算法,在运算过程中需要调整的参数较少且比较容易实现,且收敛速度较快,收敛结果较准[23]。
灰狼种群追捕猎物的公式为
D=|C·Xp(t)-X(t)|
(5)
X(t+1)=Xp(t)-A·D
(6)
式中:C和A为系数;Xp(t)为猎物位置;X(t)为灰狼位置。C和A的更新公式为
C=2r2
(7)
A=2ar1-a
(8)
式中:r1和r2为随机系数,其模值范围为[0,1];a为收敛因子,随迭代次数从2到0线性递减。再由式(5)和式(6)求出3条头狼的位置Xα(t+1)、Xβ(t+1)、Xγ(t+1),然后通过3条头狼的位置确定种群中其他灰狼的位置:
(9)
GWO算法根据当前解空间中前3个最优解搜索全局最优解,同时在搜索过程充分借助辅助系数改变某个体权重,因此算法陷入局部最优的概率较低。
2 基于GWO-VMD的滚动轴承故障特征提取方法
2.1 基于皮尔逊相关函数、最大峭度和时频谱相似度的优化目标函数
原始信号分解后的信号不能丢失原始信号的关键信息特征,且分解后的信号应更明显地体现出其内部的特征,否则做此分解操作并无意义。因此,量化分解效果的有效性应有两个准则[24-26]:一是分解后的信号应尽量包含原始信号完整信息;二是分解后应更明显地突出故障特征。
基于上述两个准则,本研究提出3个优化目标:皮尔逊相关系数、时频谱相似度以及最大峭度。
(1) 皮尔逊相关系数
皮尔逊相关系数可衡量两种信号的线性相关程度,绝对值越大代表线性相关的程度越强。
首先将信号进行VMD,然后通过得到的模态分量将信号重构,得到重构信号X(t),Xi为重构信号X(t)某一个样本点。设原始信号为S(t),Si为原始信号S(t)某一个样本点,则可计算X(t)和S(t)的皮尔逊相关系数如下:
(10)

(2) 时频谱相似度
时频谱能够描述两种信号在时域上其频率成分的变化情况,恰好解决了非平稳信号在时域上其频率不断变化的问题,通过时频谱相似度可以有效地反映两种非平稳信号的相关性。
利用希尔伯特黄变换求得重构信号时频谱Xt-f和原始信号时频谱St-f,其时频谱相似度为
(11)
(3) 最大峭度
峭度是一种无量纲参数。通常情况下滚动轴承振动信号峭度值为3左右,信号幅值呈正态分布,当出现故障时,振动信号峭度值增大且信号幅值偏离正态分布。峭度值越大,表明该滚动轴承故障越严重。
当原始信号分解后,其各个模态分量中的最大峭度越大,说明分解后的信号故障特征变现越明显,因此计算分解后各个本征模态分量的峭度,取最大的峭度:
(12)

两个时域信号的皮尔逊相关系数只能表征两个信号时域上的相关性,且在此背景下,皮尔逊相关系数只有正向判定而无反向判定,即数值高表征两个信号高度相似,但数值低并不能表征两个信号毫无相关性。因此,求得以上3个指标后,引入阈值融合皮尔逊相关系数、时频谱相似度和最大峭度,融合流程图如图1所示。

图1 融合3个目标流程图
如图1所示,当两种信号的皮尔逊相关系数大于某阈值时,则可充分表明重构信号包含原始信号的完整信息特征,因此融合最大峭度系数,提高其对故障特征的敏感性,不必再进行大量的计算求得时频谱相似度。当皮尔逊相关系数小于阈值,此时皮尔逊相关系数失效,必须求得时频谱相似度来标定重构信号与原始信号的相关性。
2.2 基于GWO-VMD的滚动轴承故障特征提取方法
在VMD算法中惩罚因子α是一个重要的参数,其决定着VMD后各IMF的带宽。通常,滚动轴承的振动信号包含谐波分量与脉冲分量,谐波信号频带带宽较小,因此VMD时需要较大的α,有利于提取其特征;而故障脉冲信号相反,其时域较短,频带带宽较大,因此VMD时需要较小的α,有利于提取其特征。
由此可见,单惩罚因子VMD无法同时提取滚动轴承振动信号包含的谐波特征与故障脉冲特征。因此,本文首先利用最大峭度准则优化VMD的分解层数K,然后通过GWO算法,以上文的优化目标函数为适应度,为每个IMF分量搜寻最优的惩罚因子,信号经分解后,对各个本征模态分量作包络谱分析,提取其故障频率特征。算法具体流程图如图2所示。
算法具体步骤如下所示。
步骤 1首先需要确定分解层数K的值,设置K从2递增到n,每次迭代中对振动信号作VMD得到K个模态分量,分别求得每个本征模态分量的峭度值,并取最大值,取第一个达到极大值时对应的K。
步骤 2设置GWO初始参数a,A、C的值。

步骤 4将每只灰狼的位置Xi作为惩罚因子[α1,α2,…,αK]对信号进行VMD,根据式(10)~式(12)计算得出适应度值,并记录最优的3个头狼个体位置Xα、Xβ和Xγ。
步骤 5通过式(9)更新其他灰狼个体的位置,并通过式(7)和式(8)更新参数A、C和a的值。
步骤 6循环执行步骤4和步骤5,直至迭代完毕。
步骤 7选取适应度值最大的个体作为优化后的惩罚因子[α1,α2,…,αK]以及最佳分解层数K作为VMD参数对信号作分解。
步骤 8对各个IMF做包络解调,提取故障特征信息。
3 实验与分析
3.1 数据源选择
本实验数据来源于某电气工程实验室的滚动轴承数据,是相关研究学者普遍采用的数据集。该实验采用一个参数可调节的电机作为负载,负载可为1 hp、2 hp以及3 hp。实验中的故障类型为表面加工的单点故障。实验中被测试的轴承有两种,其中SKF型号轴承的故障直径包含0.007 mils、0.014 mils、0.021 mils,NTN型号轴承的故障直径包含0.028 mils以及0.040 mils。本研究选择了故障直径为0.021 mils的SKF型号轴承振动信号数据来验证所提方法的有效性,其转速为1 772 r/min,采样频率为12 kHz。
3.2 实验过程与结果分析
首先,根据模型算法求得最佳分解层数,固定分解因子,计算出不同分解层数对应的最大峭度值,最大峭度与分解层数的关系图如图3所示。由图3可以观察到,最大峭度值对应的分解层数为4,因此最佳分解层数为4层。求出最佳分解层数后,运用GWO-VMD算法,为每层模态求得最佳的惩罚因子。

图3 最大峭度与分解层数的关系
本实验还将本算法与基于参数优化的VMD(parameter optimized VMD,PO-VMD)、基于蝗虫优化算法的VMD(grasshopper optimization algorithm-VMD, GOA-VMD)两种算法求解最优值的收敛情况进行对比,3种算法的收敛迭代折线图如图4所示。从图4中可观察到,GWO-VMD算法收敛效果最好,在47代左右基本收敛达到最优值;PO -VMD算法虽在前期收敛较快,但最终在70代左右才基本收敛达到最优值;GOA-VMD算法的效果则完全不如GWO -VMD算法。表1为各算法达到最优值的收敛情况,可观察到虽然PO-VMD算法可达到最快的收敛速度,但其整体性能远远不如GWO-VMD算法,而GOA-VMD算法各项指标都不如GWO-VMD算法,因此可表明GWO-VMD算法的效率性强于其他算法。由算法求得4层对应的惩罚因子分别为[5 224, 4 110, 1 860, 540]。

表1 3种算法收敛情况
将上述求得的最佳分解层数和惩罚因子代入,对信号作VMD,并通过分解后的各个模态分量重构原始振动信号数据如图5和图6所示。由图5和图6可观察到,原始信号与重构信号的时域波形及其相似。对这两种信号作包络解调,如图7所示,可观察到原始信号与重构信号的包络谱图极其相似,重构信号包络谱图仅仅在某些频率上的幅值有些许损失,因此表明该重构信号包含原始信号的完整特征,证明了该方法的有效性。

图5 原始振动信号波形图

图6 重构信号波形图

图7 原始信号与重构信号包络谱
再进一步对信号作分解,并求出各个IMF分量的频谱图。GWO-VMD算法分解后各个IMF的时域波形图以及对应的频谱图如图8所示。可观察到,原始信号通过分解后,分离出了各个频段部分的分量,分解效果较好。PO -VMD算法和VMD算法分解各分量时域波形和频谱分别如图9和图10所示。可以观察到,图9中IMF2的频谱图与IMF4频谱图处有重叠,并且在低频处丢失了信号应有的频率特征。图10也有相似的特点,图10中IMF1的频谱图与IMF4的频谱图处有重叠,也丢失了信号本该有的低频特征,这证明了本文方法的有效性以及优越性。

图9 PO-VMD各分量时域波形和频谱

图10 VMD各分量时域波形、频谱
然后,再对3种算法分解得到的IMF分量作包络解调,得到各个IMF分量的包络谱图。GWO-VMD后各IMF的包络图如图11所示。可以看到,在故障频率处以及其2~5倍频处有明显的谱峰,说明提取到了其故障特征频率,证明本文提出方法的有效性,并且谱图在故障频率及其倍频处比较干净,干扰较少。
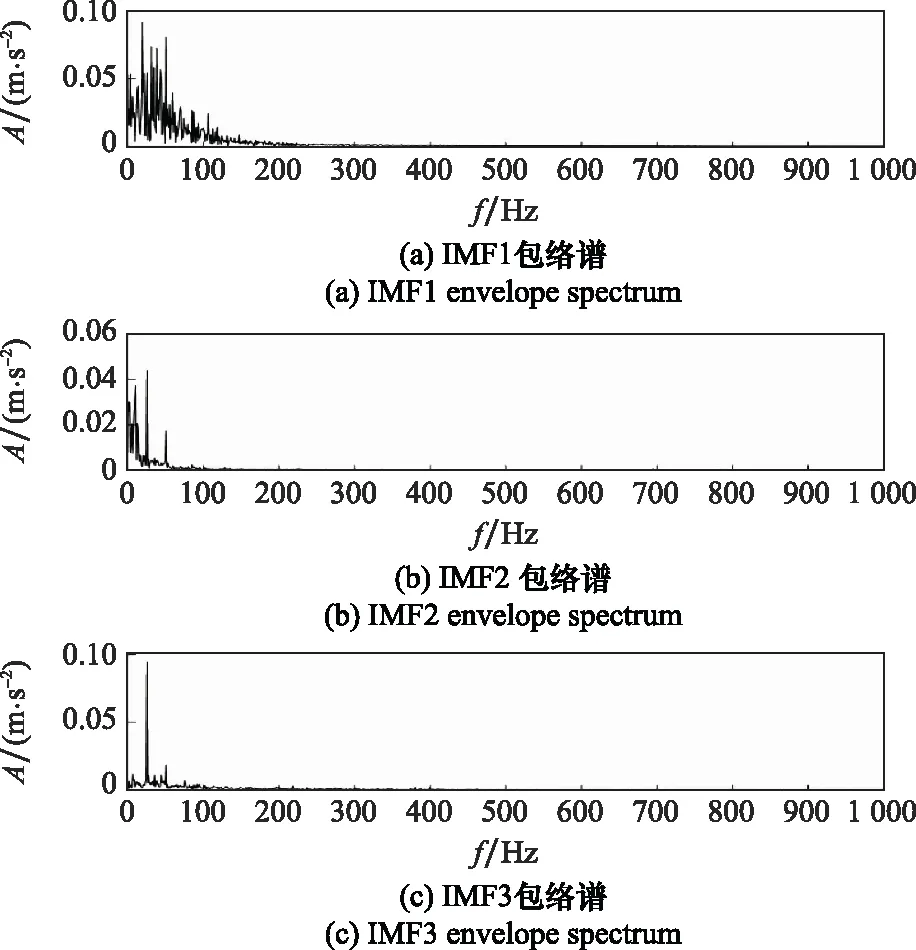
图11 GWO-VMD后4个IMF的包络谱
PO-VMD后的各IMF包络谱图如图12所示。从图12可以观察到,通过PO -VMD后,虽在IMF4包络谱图中在故障特征频率处以及其2~3倍频处有谱峰,但是其谱峰不是很明显,受周围噪声频率干扰会比较大,并且在4倍频以及4倍频以上处基本看不到谱峰,抑制效果过于严重导致所需要的故障特征也被抑制,无法有效地表征信号中蕴含的故障特征信息。
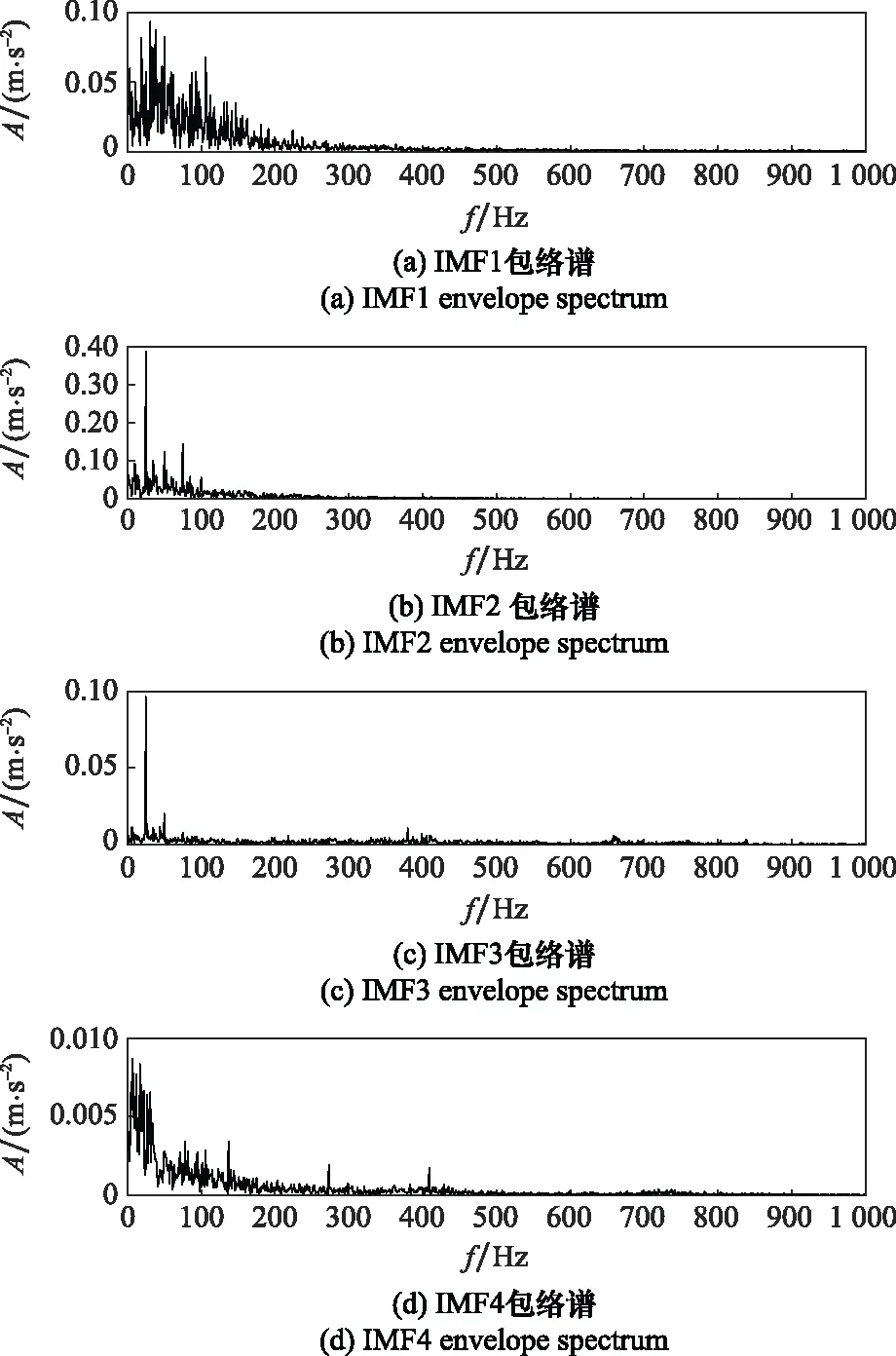
图12 PO-VMD后各IMF的包络谱
VMD后的各IMF包络谱图如图13所示。从图13可观察到,VMD后各个IMF都出现了较大的噪声,分解过程中噪声抑制不明显,并且分解后频率成分几乎集中在低频中,该频段噪声干扰很大,无法有效地观察到故障频率特征。

图13 VMD后各IMF的包络谱
上述分析结果表明了本文方法提取效果更好,能够更有效地提取出故障特征频率。表2中列出了3种方法提取的特征频率幅值情况,并做了归一化方便对比。同时,从表2也可以观察到本文所提的GWO-VMD方法提取的特征频率幅值远大于其他两种对比方法,进一步验证了本方法的有效性和优越性。

表2 3种算法提取特征频率幅值
4 结 论
本文提出了一种基于多惩罚因子优化VMD的滚动轴承故障特征提取方法,该方法以VMD理论为基础,以提升故障特征显著性和包含信息完整性为目标,构建融合皮尔逊相关系数、时频谱相似度以及最大峭度值的优化目标函数,并利用GWO算法自适应地搜索VMD的最佳分解层数和每个IMF分量对应的惩罚因子,解决了VMD需根据经验手动设置参数导致分解效果不佳的问题,实现了滚动轴承故障特征的有效提取。实验结果分析表明,GWO-VMD与PO -VMD和VMD等算法相比,可以在噪声环境下有效地提取轴承故障特征。
猜你喜欢
机床与液压(2023年1期)2023-02-03
东北水利水电(2022年6期)2022-06-28
康复(2022年31期)2022-03-23
空间科学学报(2021年6期)2021-03-09
铁道机车车辆(2020年2期)2020-05-20
电子制作(2019年11期)2019-07-04
测控技术(2018年7期)2018-12-09
电子世界(2018年12期)2018-07-04
振动、测试与诊断(2016年1期)2016-04-13
小天使·五年级语数英综合(2015年4期)2015-04-20
