点云密度对机载激光雷达大区域亚热带森林参数估测精度的影响*
2023-10-27 10:18周相贝李春干代华兵
林业科学 2023年9期
周相贝 李春干 代华兵 余 铸, 李 振 苏 凯
(1. 广西大学林学院 南宁530004;2. 广西自然资源职业技术学院 扶绥 532199;3. 广西壮族自治区林业勘测设计院 南宁 530011)
机载激光雷达(light detection and ranging, LiDAR)点云数据详细、准确刻画森林冠层三维结构,全面反映林分冠层水平和垂直分布状况,为森林参数估测和制图奠定了坚实的生物物理基础,已逐步成为当前单木和林分尺度森林参数估测的先进遥感技术(李增元等,2016;曹林等,2013;Mascaroet al., 2011;Zolkoset al., 2013;Singhet al., 2015),并成功应用于各类森林,包括温带森林(庞勇等,2012;Iokiet al., 2010;Ahmedet al., 2013)、北方森林(Næsset, 2004a;Thomaset al.,2006;Maltamoet al., 2016)、热带林(Drakeet al., 2003;Garcíaet al., 2017)、地中海森林(Garcíaet al., 2010;Montealegreet al., 2016)、高度集约经营的桉树(Eucalyptus)人工林(Görgenset al., 2015)以及城市森林(Heet al., 2013;Giannicoet al., 2016)、灌木林(Estornellet al., 2011)、林下植被(Estornellet al., 2011;2012;Liet al., 2017)等,从国家尺度(McRobertset al.,2010;Wattet al., 2013)和省州尺度(Johnsonet al., 2014)的森林资源监测到企业尺度(Straubet al., 2013)的森林资源调查评估均有大量成功应用案例。
随着传感器技术的快速发展,机载激光雷达数据精度得到极大改善(Renslowet al., 2000),由离散激光雷达系统产生的点云密度和每个脉冲的回波数量呈指数增加趋势(Singhet al., 2016),一些传感器如Riegl Q680i和YellowScan Mapper等,点云密度达30~40点·m-2(Latifiet al., 2015),可提取枝条等十分详细的树冠结构信息(Vauhkonenet al., 2013)。在以直升机为平台进行低空飞行和窄扫描角的情况下,激光雷达点云密度高达每平方米上千个甚至数千个(Pearseet al.,2018),能够极为精确刻画林木的枝、干结构,减轻地面调查工作量(Kellneret al., 2019)。点云密度增加有助于提高冠层垂直剖面描述精度和森林参数估测精度;然而,点云密度与数据获取成本呈正相关关系,点云密度高,意味着飞行高度降低,扫描条带变窄,导致数据获取成本增大,且对于大面积森林监测而言,高密度点云带来的海量LiDAR数据处理仍是一个挑战(Singhet al., 2016)。因此,大面积森林监测中几乎均使用有人驾驶固定翼飞机获取的低密度(≤4点·m-2)至中密度(4~20点·m-2)点云数据,极少使用高密度(>20点·m-2)点云数据(Pearseet al., 2018),且需要通过点云密度和估测精度的协调对获取参数进行优化,以平衡大面积森林资源监测的成本效率和精度(Jakubowskiet al., 2013;Zhaoet al., 2009)。
众多学者在点云密度对森林参数估测模型的影响方面进行了大量研究。有3种点云数据产生方法:一是对原有较高密度的数据采用降低密度(随机稀疏或系统稀疏)方法,得到一系列不同密度点云数据(Gobakkenet al., 2008;Magnussenet al., 2010;Tesfamichaelet al., 2010;Treitzet al., 2012;Strunket al.,2012;Ruizet al., 2014;Singhet al., 2015;2016;Otaet al., 2015;Garcíaet al., 2017);二是在同一区域以不同方式(不同飞行高度或不同扫描设备等)获取不同密度点云数据(Parkeret al., 2004;Næsset, 2004b;Thomaset al., 2006);三是模拟数据(Lovellet al., 2005)等。第二种方法获取的点云数据最接近真实场景,但成本太高,第三种方法获取的点云数据与真实场景存在较大差异,第一种方法为常用方法。有研究表明,系统稀疏方法得到的点云较随机稀疏方法更接近真实场景(Raberet al., 2007;Treitzet al., 2012)。分析方法均是比较不同密度下估测模型的决定系数(R2)和均方根误差(RMSE)等,以评估不同密度数据对森林参数估测模型的影响,得到的普遍结论是降低点云密度会增加LiDAR变量的变动,但即使点云密度降至很低,其模型精度受到的影响也很小(Strunket al., 2012)。然而,现有关于点云密度影响的研究很少关注景观背景对森林结构和生物量估测的影响(Singhet al., 2015),也很少涉及人工林,尤其是高度集约经营的人工林。不同林木起源和经营管理方式形成的森林冠层结构相差很大,探明不同森林类型中不同密度点云的LiDAR变量变动情况,是LiDAR点云密度优化需要面对的问题。此外,现有大多数研究均采用逐步回归法建立多元线性回归模型,得到的模型与数据集紧密相关,林分状况不同、森林参数不同、传感器不同,选取的模型变量相差很大(Görgenset al., 2015;Giannicoet al., 2016;Montealegreet al., 2016;Maltamoet al., 2016;Xuet al., 2018),不利于模型精度的比较分析。更为重要的是,现有研究只是分析不同点云密度对森林参数估测模型的影响,并未阐明点云密度对森林参数估测模型的影响机制。
本研究利用我国广西一个亚热带山地丘陵区域获取的机载激光雷达数据和样地测量数据,分析不同密度点云的机载激光雷达变量差异,探明密度点云对林分尺度机载激光雷达森林参数估测精度的影响及其机制,以期为机载激光雷达大区域森林调查监测应用技术方案的优化提供参考依据。
1 研究区概况与方法
1.1 研究区概况及样地和机载激光雷达数据
以广西南宁市行政区(107°45′E—108°51′E,21°13′N—23°32′N)为研究区,面积22 112 km2,样地数量383块。研究区概况、样地和机载激光雷达数据详见李春干等(2021)。
1.2 机载激光雷达数据处理
通过系统稀疏方法(Treitzet al., 2012),将归一化全密度点云(4.35点·m-2)分别稀疏至4.0、3.5、3.0、2.5、2.0、1.5、1.0、0.5、0.2和0.1点·m-2。具体方法为:对于某块样地,设需要稀疏至的点云密度为di(点·m-2),则该样地需要剔除的点云比例为p(%)=(1-di/4.35)×100,然后,根据点云编号,按相同间隔去除激光点。如将点云密度稀疏至2.5点·m-2时,则去除43%的点云,此时,可去除编号为2、4、6、8、12、14、16、18、···,即每100个点云中先剔除40个点云,剩余待剔除的3个点可去除编号为30、60、90的点云。依此类推,每种森林类型得到1个全密度(原始)点云数据集和10个稀疏点云数据集。各数据集均采用由全密度点云数据集生产的数字高程模型(digital elevation model,DEM)进行高程归一化处理。
对于各点云数据集,分别提取12个激光点云统计特征参数(LiDAR变量),包括25%、50%和75%分位数高度(ph25、ph50和ph75),平均高度(Hmean),最大高度(Hmax),高度分布的变动系数(Hcv);25%、50%和75%分位数密度(dh25、dh50和dh75),郁闭度(CC);叶面积密度(leaf area density, LAD)的均值(LADmean)和变动系数(LADcv)(Bouvieret al., 2015)。激光雷达传感器能够记录多次回波,尽管有研究表明由首次回波提取的LiDAR变量完全能够满足生物量估测需要(Singhet al., 2016;Chenet al., 2012;Kimet al., 2009),但本研究仍与大多数研究一样,采用全部回波提取LiDAR变量。
1.3 点云密度对激光雷达变量和森林参数估测模型精度的影响评价
为探明点云密度对LiDAR变量的影响,应用配对样本t检验方法,分析各稀疏密度点云数据集中12个LiDAR变量的均值与全密度点云数据集中相应变量的均值的差异。
为评估点云密度对森林参数估测模型精度的影响,对于每个点云数据集,采用样地调查资料和LiDAR变量分别建立各森林类型林分蓄积量(stand volume,VOL)和断面积(basal area,BA)估测模型。Bouvier等(2015)提出由Hmean、CC、LADcv和Hstdev构成的普适性乘幂模型,可用于林分蓄积量、出材量、地上生物量和断面积估测。前期研究(李春干等,2021)发现,用Hcv替换Hstdev效果更好,蓄积量和断面积估测模型的结构式如下:
式中:yˆ 为各森林类型(层)的林分参数(VOL或BA)估计值;a0、a1、···、a4为模型参数。
采用牛顿-高斯迭代法求解模型参数,选取决定系数(R2)、相对均方根误差(relative root mean square error,rRMSE)和平均预估误差(mean prediction error,MPE)评价模型拟合效果。MPE计算公式见曾伟生等(2011)和Zeng 等(2018)。
为减少随机误差,对各森林类型的各点云数据集进行50次森林参数估测试验,每次试验随机抽取70%样本数据用于建模,30%样本数据用于检验。通过检验样本R2、rRMSE、MPE的均值评价模型表现。应用t检验方法,对各稀疏密度点云数据集与全密集度数据集VOL和BA估测值的均值进行差异显著性检验。
2 结果与分析
2.1 不同密度点云的LiDAR变量的差异
2.1.1 高度变量 各森林类型中,各稀疏数据集ph25、ph50、ph75、Hmean与全密度数据集点云相应变量的差值的均值及其标准差很小,一般均小于0.05 m,且标准差大于均值。当点云密度小于0.5点·m-2或0.2点·m-2时,差值的均值及其标准差迅速增大(表1)。随点云密度降低,稀疏密度点云的Hmax逐渐减小,与全密度点云Hmax的差值的均值及其标准差逐渐增大。当点云密度由4.0点·m-2降至0.1点·m-2时,Hmax差值的均值(±标准差)变化范围为:杉木林0.013(±0.048)~1.847(±1.167)m,松树林0.006(±0.039)~1.503(±0.978)m,桉树林0.025(±0.087)~1.277(±0.812)m,阔叶林0.016(±0.074)~2.066(±1.335)m。当点云密度为0.1点·m-2时,4种森林类型的Hmax比全密度点云的Hmax分别低12.1%、8.5%、6.3%和13.2%。不同密度点云Hcv的均值基本相等。
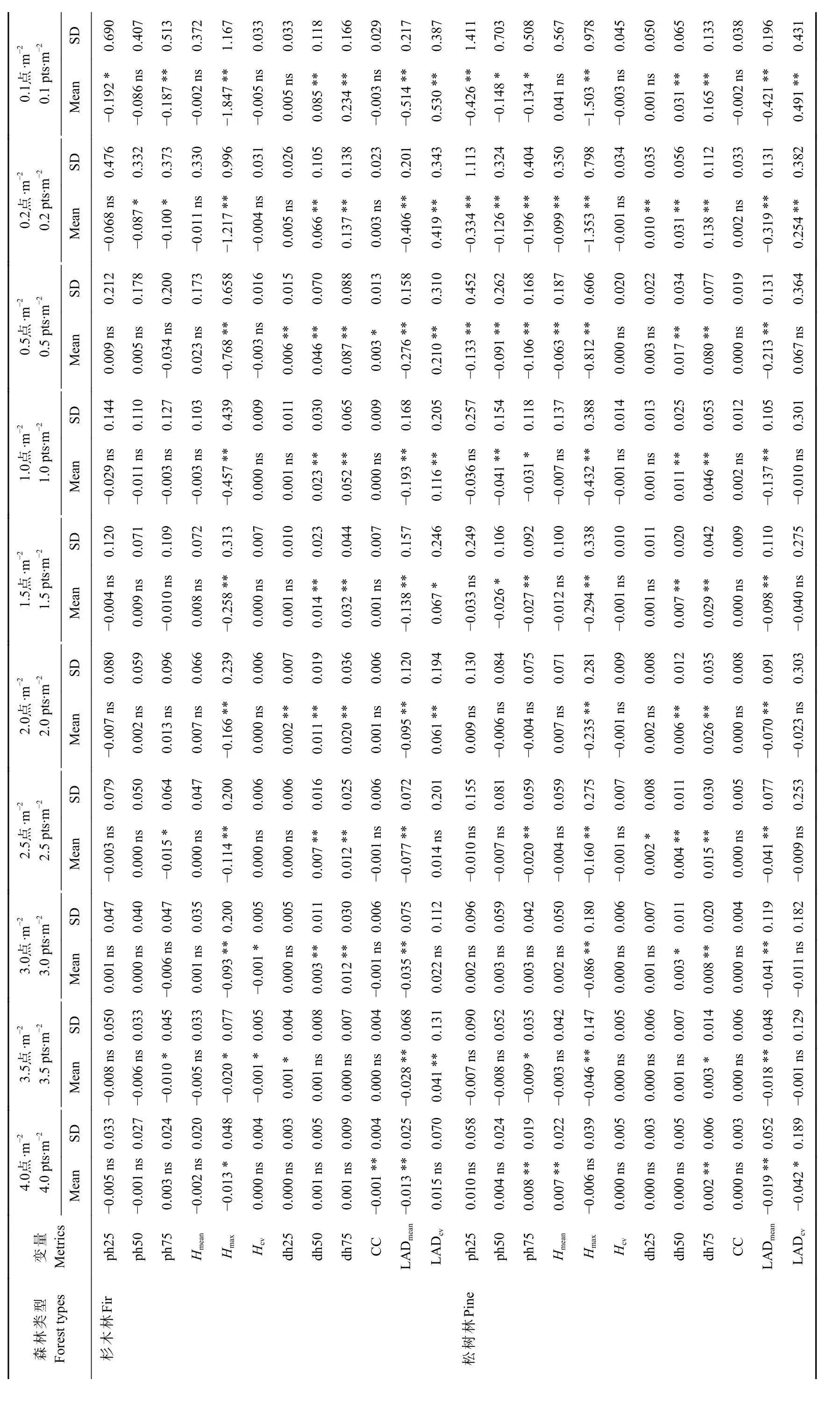
表1 4 种森林类型中各稀疏点云数据集LiDAR 变量与全密度点云数据集LiDAR 变量的差值的均值和标准差及其配对样本t 检验结果①Tab. 1 Mean and standard deviation (SD) of the differences of LiDAR-derived metrics between full-density point cloud dataset (4.35 pts·m-2) and various reduced-density point cloud datasets (4.0,3.5,3.0, 2.5, 2.0, 1.5, 1.0, 0.5, 0.2, 0.1 pts·m-2) of four forest types and the result of paired sample t-test
配对样本t检验结果(表1)表明:1) 点云密度较低时,4种森林类型分位数高度(ph25、ph50和ph75)的均值与全密度点云相应变量的均值存在显著性差异(α≤0.05),但不同森林类型、不同变量出现显著性差异时的点云密度不同,松树林ph50、ph75在点云密度≤1.5点·m-2时存在显著性差异,ph25在点云密度≤0.5点·m-2时存在显著性差异,杉木林ph25在点云密度≤0.5点·m-2时存在显著性差异;2) 点云密度≥2.0点·m-2时,各森林类型中虽然也出现某密度某变量的均值与全密度点云相应变量的均值存在显著性差异,但均不具有规律性;3) 各森林类型不同密度点云Hmean和Hcv的均值与全密度点云相应变量的均值不存在显著性差异,松树林Hmean在点云密度≤0.5点·m-2时的均值存在显著性差异除外;4) 所有森林类型中各稀疏密度点云Hmax的均值与全密度点云的Hmax的均值存在显著性差异。
2.1.2 密度变量 随点云密度降低,LiDAR密度变量具有如下变化特征(表1):1) 各森林类型中各稀疏密度点云CC的均值与全密度点云CC的均值基本不存在显著性差异;2) 阔叶林dh25的均值在点云密度≤1.5点·m-2时与原始密度点云dh25的均值存在显著性差异,其余森林类型dh25的均值不存在这种情况;3) 杉木林和松树林在点云密度≤3.0点·m-2、阔叶林在点云密度≤3.5点·m-2时,各稀疏密度点云dh50的均值与全密度点云dh50的均值存在显著性差异,桉树林各稀疏密度点云dh50的均值与全密度点云dh50的均值不存在显著性差异;4) 松树林和桉树林各稀疏密度点云dh75的均值与全密度点云dh75的均值存在显著性差异,杉木林和阔叶林在点云密度分别小于3.0点·m-2和3.5点·m-2时,各稀疏密度点云dh75的均值与全密度点云dh75的均值存在显著性差异。
以上说明在各森林类型中,各稀疏密度点云CC和中下层分位数密度(dh25)的均值与全密度点云相应变量的均值的差异不显著(阔叶林dh25除外),尽管差值的均值很小,但中上层分位数密度(dh50和dh75)的均值与全密度点云相应变量的均值存在显著性差异。
2.1.3 叶面积密度变量 随点云密度降低,各森林类型中稀疏密度点云LADmean与全密度点云LADmean的差值的均值及其标准差逐渐减小,当点云密度≤1.0点·m-2时,差值的均值减小幅度明显加大。当点云密度由4.35点·m-2降至0.1点·m-2时,杉木林、松树林、桉树林和阔叶林LADmean的均值分别减小42.2%、43.4%、48.6%和49.4%。LADcv的变化情况与LADmean相反,表现为点云密度≥1.0点·m-2时,随点云密度降低,差值的均值和标准差缓慢增大,点云密度≤1.0点·m-2时差值的均值和标准差迅速增大。当点云密度由4.35点·m-2降至0.1点·m-2时,杉木林、松树林、桉树林和阔叶林LADcv的差值的均值分别增大33.5%、28.0%、44.9%和16.6%(表1)。
各森林类型中,各稀疏密度点云LADmean的均值与全密度点云LADmean的均值存在显著性差异;当点云密度较低时,稀疏密度点云LADcv的均值与全密度点云LADcv的均值存在显著性差异,但不同森林类型出现显著性差异时的点云密度不同,杉木林和桉树林分别为2.0和1.0点·m-2,松树林和阔叶林为0.2点·m-2。
2.2 不同密度点云对森林参数估测精度的差异
各森林类型中,不同点云密度VOL和BA估测值的差值均很小。在50次模型适应性检验中,当点云密度分别为0.1和4.35点·m-2时,模型估测值的平均差值(各次中最大差值)为:杉木林VOL-0.66%(-3.72%),BA-0.67%(-3.49%);松树林VOL-0.35%(6.68%),BA-0.44%(3.55%);桉树林VOL-0.35%(-2.22%),BA-0.00%(-1.78%);阔叶林VOL0.67%(4.61%),BA0.21%(3.24%)。t检验结果表明,各森林类型中各稀疏密度点云VOL和BA估测值的均值与全密度点云相应估测值的均值不存在显著性差异。
随点云密度降低,在杉木林和桉树林VOL估测模型中,LiDAR变量对VOL变化的解释率(R2)呈逐渐缓慢减小的变化趋势。2个模型中,点云密度为0.1点·m-2时的R2分别比密度为4.35点·m-2时减小10.9%和3.9%,松树林和阔叶林VOL估测模型的R2则无明显变化规律(表2)。在4种森林类型BA估测模型中,点云密度变化对R2的影响无规律性。总体上,当点云密度≥1.0点·m-2时,4种森林类型VOL和BA估测模型的R2变化不大,但当点云密度≤0.5点·m-2时,R2呈明显减小趋势。
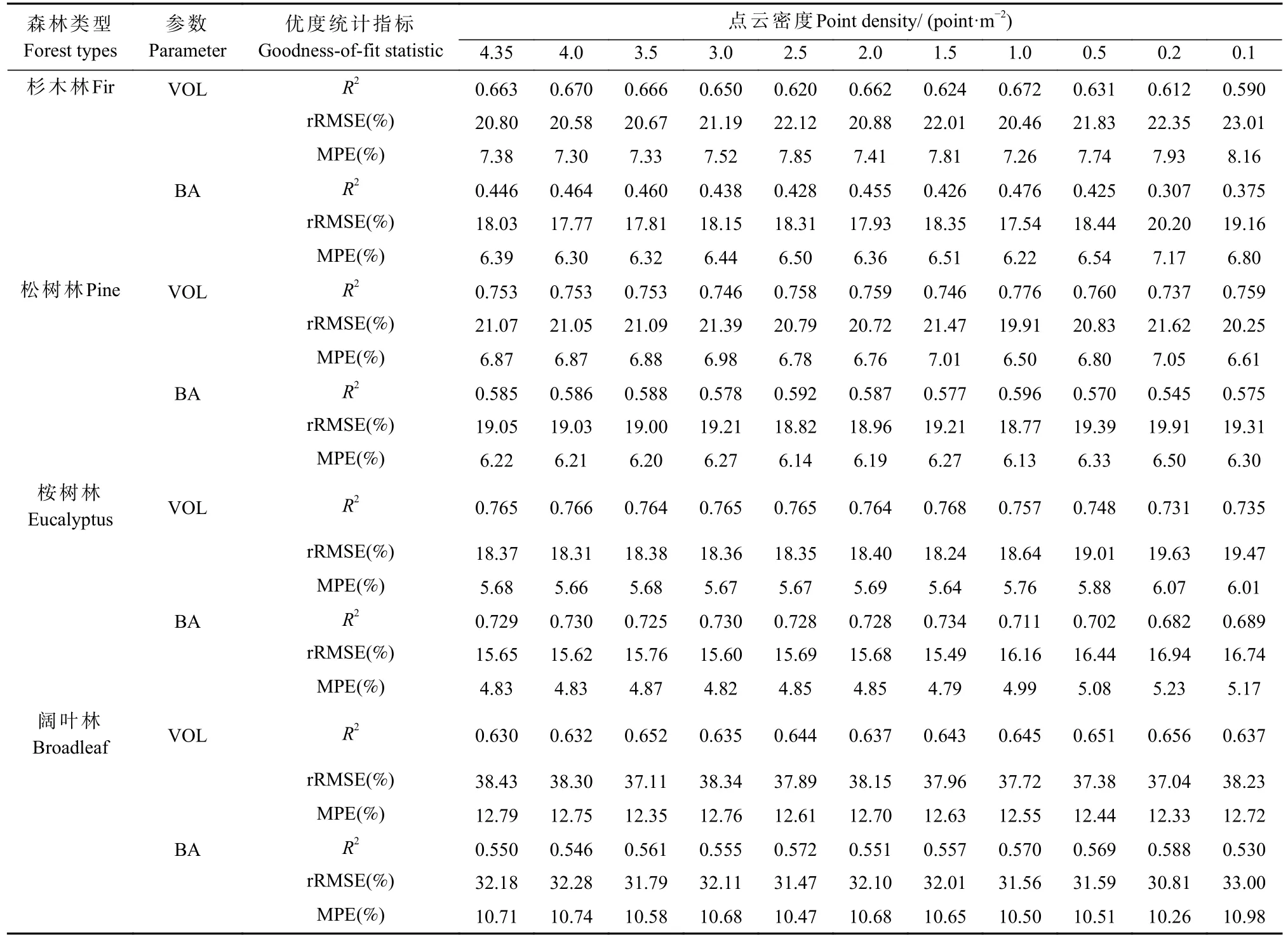
表2 4种森林类型中不同密度点云蓄积量和断面积估测模型的拟合效果Tab. 2 Goodness-of-fit statistic for VOL and BA predictive models using field measurements and LiDAR-derived metrics from datasets of various point cloud densities in four forest types
当点云密度由4.35点·m-2降至0.1点·m-2时,杉木林和桉树林VOL估测的rRMSE呈缓慢增大趋势,2个模型在点云密度为0.1点·m-2时的rRMSE比全密度点云分别增大10.6%和6.0%;不同点云密度松树林、阔叶林蓄积量估测模型的rRMSE分别在19.91%~21.62%、37.03%~38.43%范围呈无规律性的较小幅度变化。4种森林类型BA估测模型中,rRMSE均随点云密度降低呈缓慢增大趋势。总体上,当点云密度≤0.5点·m-2时,各森林类型VOL和BA估测模型rRMSE增大的幅度明显增大,阔叶林除外。随点云密度逐渐降低,MPE的变化与rRMSE类似。当点云密度由4.35点·m-2降至0.1点·m-2时,杉木林、桉树林VOL和BA模型的MPE均呈逐渐缓慢增大趋势,松树林和阔叶林VOL和BA模型的MPE均呈小幅度无规律性变动。当点云密度≤0.5点·m-2时,杉木林VOL和BA模型MPE增大的幅度较明显,其余森林类型无此特征。
上述各森林类型VOL和BA估测模型表现随点云密度变化的情况可归纳为:1) 随点云密度降低,大部分VOL和BA估测模型的R2呈缓慢减小、rRMSE和MPE呈缓慢增大趋势,但一些模型的上述指标表现为无明显规律性;2) 当点云密度≤1.0点·m-2或≤0.5点·m-2时,大多数模型的R2减小、rRMSE和MPE增大的幅度明显增大。
3 讨论
3.1 点云密度对LiDAR变量的影响
本研究发现,采用全密度点云生成的DEM对稀疏密度点云进行点云数据归一化时,降低点密度对不同LiDAR高度变量的影响不甚相同:点云平均高、高度分布的变动系数基本不受点云密度影响,但最大高存在严重影响;当点云密度较低时,ph25、ph50、ph75等分位数高度的均值与全密度点云的均值存在显著性差异,但不同森林类型、不同分位数密度出现差异时的密度上限不同,杉木林、桉树林为0.2点·m-2,阔叶林为0.1点·m-2(ph25为0.5点·m-2),松树林为1.5点·m-2(ph25为0.5点·m-2)。该结果与García等(2017)在3个研究区(原始点云密度≥10点·m-2,样地面积900 m2)的结论不尽相同,其结论中,当点云密度由原始密度降至1点·m-2时,Hmax均存在显著性差异,ph25和点云高度的标准差(Hstdev)均不存在显著性差异,Hmean、ph50、ph75在湿润常绿热带林和雨林中存在显著性差异,在橡树林、针叶林和针叶混交林及老龄湿润热带林中不存在显著性差异。其原因可能是:1) 森林类型不同造成森林三维结构不同。本研究中,桉树林为高度集约经营人工林,绝大部分为单层林;阔叶林为天然混交林,几乎全为复层林;杉木林为人工林,在幼龄林多为单层林,但在成熟林有相当比重的复层混交林【与阔叶树或马尾松(Pinus massoniana)混交】;松树林多为天然林,为阳性树种,既有单层纯林,亦有混交林,这些结构差异导致不同森林类型激光点云分位数高度的差异。García等(2017)3个研究区也包含不同森林类型,其点云高度分位数的差异情况亦不相同。2)García等(2017)研究中,不同密度点云高度的归一化由其相应密度点云生产的DEM进行,当点云密度降低时,激光脉冲击中冠层顶部和穿透至地面的概率减小,从而影响DEM的精度(Disneyet al.,2010)。
正如期望的一样,不同森林类型中,不同密度点云的CC均不存在显著性差异。本研究发现,点云密度对分位数密度具有较大影响,但森林类型不同、点云密度不同,不同分位数密度的差异情况各不相同。由于激光脉冲击中树冠顶部的概率减小,因此,各森林类型的稀疏密度点云中,上层分位数密度dh75大多存在显著性差异。对于垂直结构简单的桉树人工林而言,不同密度点云的中下层分位数密度(dh25和dh50)均不存在显著性差异;对于垂直结构复杂的阔叶林而言,当点云密度降至3.5点·m-2时,dh25和dh50存在显著性差异;对于垂直结构复杂性介于上述二者之间的杉木林和松树林,当点云密度降至3.0点·m-2时,冠层中部分位数密度(dh50)存在显著性差异,但各点云密度之间,dh25不存在规律性的显著性差异。其可能原因是:森林垂直结构决定点云的穿透性和垂直分布,垂直结构越复杂,点云穿透性越差,点云垂直分布变异越大,当点云密度降低时,由于点云垂直分布的不均匀性而扩大了其变异。如表1所示,尽管不同密度点云分位数密度的均值相差很小,但其标准差随点云密度降低逐渐增大。
叶面积密度剖面依据垂直冠层中给定高度的高度层(本研究为0.3 m)的高度层的间隙系数进行计算(Bouvieret al., 2015)。由于一些垂直层的点很少(几十个点甚至几个点),当点云密度降低时,间隙系数变化较大。相对于分位数密度,叶面积密度剖面受点云密度影响更大,故各森林类型中不同密度点云的LADmean均相差较大且存在显著性差异,但其标准差也随点云密度降低逐渐增大。因此,在点云密度不太小时,叶面积密度分布的变动系数(LADcv)不存在显著性差异(表1)。
总之,不同森林类型的点云平均高、点云高度分布变动系数和郁闭度不受点云密度影响,而点云最大高度和反映冠层垂直结构的叶面积密度均值正好相反,不同点云密度对不同森林类型的分位数高度、分位数密度和叶面积密度分布变动系数的影响不同,其原因是不同森林类型具有不同垂直结构。综观已有研究,未见点云密度对不同森林类型分位数密度和叶面积密度影响的报道,这正是本研究的一个亮点。
3.2 点云密度对森林参数估测模型的影响机制
本研究发现,各森林类型中稀疏密度点云森林参数(VOL和BA)估测值的均值与全密度点云估测值的均值不存在显著性差异,模型精度变化不明显,与很多关于森林参数和生物量估测的研究结论一致(Montealegreet al., 2016;Singhet al., 2015;2016;Otaet al., 2015;Wattet al., 2014;Jakubowskiet al., 2013;Strunket al., 2012;Treitzet al., 2012;Tesfamichaelet al.,2010;Gobakkenet al., 2008)。Thomas等(2006)认为点密度降至0.035点·m-2时,森林参数估测精度不受影响。
然而,不可否认的是,随点云密度降低,各森林参数估测模型的R2均呈缓慢减小、rRMSE和MPE呈缓慢增大的变化趋势,且当点云密度≤1.0点·m-2或≤0.5点·m-2时,大多数模型的R2减小、rRMSE和MPE增大的幅度呈明显增大趋势(表2),说明当点云密度降低时,尽管估测结果差异不显著,但模型精度仍然存在缓慢降低趋势。本研究发现,虽然用于构建估测模型的4个变量(Hmean、CC、LADcv和Hcv)在稀疏密度点云中的均值与全密度点云相应变量的均值不存在显著性差异(出现的少量显著性差异属随机误差,不具规律性),但在各森林类型中,当点云密度由4.35点·m-2降至0.1点·m-2时,4个模型变量中总有1~3个变量的变动系数呈较大幅度增大变化,如杉木林的CC、LADcv和Hcv的变动系数分别增大19.2%、18.6%和21.0%,松树林的CC和Hcv分别增大14.6%和17.9%,桉树林的CC和Hcv分别增大30.0%和34.6%,阔叶林的Hcv增大13.0%,这意味着模型变量变动增大,推测是模型精度逐渐降低的原因,但仍需要作更深入研究。以上也说明在构建森林参数估测模型时,需要科学选择模型变量。
4 结论
本研究分析点云密度对机载激光雷达变量和森林参数估测模型的影响,初步阐明点云密度降低对森林参数估测模型的影响机制。
点云密度降低对点云平均高及其变动系数和郁闭度不存在显著影响,但对点云最大高、中上层分位数密度(如dh75)、叶面积密度均值存在显著影响;当点云密度降至一定程度时,分位数高度存在显著影响,但不同森林类型和不同分位数高度出现显著影响时的点云密度不同;上层分位数密度受点云密度影响很大,除桉树林外,其余森林类型中层分位数密度受点云密度的影响也较大,除阔叶林外,下层分位数密度几乎不受点云密度影响;叶面积密度的变动系数在点云密度降至一定程度时受到影响,但不同森林类型出现显著影响的点云密度不同。不同密度点云的各森林类型估测结果不存在显著性差异,但随点云密度降低,模型拟合精度呈缓慢降低趋势,尤其是当点云密度降至0.5点·m-2时,模型精度降低的幅度明显增大。点云密度降低导致激光雷达变量标准差增大是造成森林参数估测模型精度降低的主要原因。在实际区域性森林资源调查监测应用中,点云密度以大于0.5点·m-2为宜。
本研究中,最大点云密度为4.35·m-2,所有稀疏密度点云均采用全密度点云生产的DEM进行高程归一化处理,各森林类型2个森林参数估测模型均采用相同结构式。当点云密度更大时,或不同稀疏密度点云均采用其相应地面点数据生产的DEM进行高程归一化处理时,或不同森林类型不同森林参数采用不同模型结构式进行估测时,点云密度对LiDAR变量和估测模型表现的影响有待进一步研究。
猜你喜欢
数学年刊A辑(中文版)(2021年4期)2021-02-12
电子制作(2019年24期)2019-02-23
西南交通大学学报(2018年5期)2018-11-08
苏州科技大学学报(自然科学版)(2017年1期)2017-03-20
知识产权(2016年8期)2016-12-01
高中生学习·高三版(2016年1期)2016-05-30
中学生数理化(高中版.高二数学)(2016年4期)2016-03-01
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
数学年刊A辑(中文版)(2014年4期)2014-10-30
航天返回与遥感(2014年4期)2014-07-31