基于表面肌电与步态的外骨骼穿戴疲劳评测
2023-10-24 10:09:14何恺伦吕健李林徐兆潘伟杰
浙江大学学报(工学版) 2023年10期
何恺伦,吕健,李林,徐兆,潘伟杰
(1.贵州大学 现代制造技术教育部重点实验室,贵州 贵阳 550025;2.贵州航天控制技术有限公司,贵州 贵阳 550009)
现阶段的无源下肢外骨骼主要用于辅助训练和辅助行走.人体下肢运动是一种由骨骼肌、骨骼以及关节共同协作完成的高自由度复杂运动,在下肢运动过程中,主观疲劳感受与客观疲劳感受会有相互作用[1].大多数外骨骼使用过程的疲劳评测仅仅通过单一维度评价指标进行分析,因此会导致评价结果较为片面并且准确率较低.本研究采用主客观多维度数据对外骨骼进行评测,可以提高评测精度以及外骨骼设备的人机优化效率,从而降低使用风险带来职业损伤的几率.
针对穿戴式无源下肢外骨骼的疲劳状态评测问题,当前学者主要聚焦于表面肌电信号(surface electromyography,sEMG)、压力检测与血氧饱和度的外骨骼穿戴疲劳研究.在sEMG 评测方面,荷兰代尔夫特理工大学设计了下肢外骨骼机器人XPED1,该外骨骼由人工肌腱和可调节框架结构组成,实验结果表明该外骨骼能够有效降低穿戴者腓肠肌的sEMG 强度[2].渥太华大学设计出一款用于重力支撑的无源下肢外骨骼机器人,通过局部压力检测,在站立姿态下外骨骼可分担穿戴者身体重量的9.41%~26.18%;在行走状态下外骨骼可对穿戴者提供14.02%~27.52%的身体重量支撑力[3].河北工业大学设计的是一款用于承重的下肢外骨骼机器人NNLELE,该外骨骼主要由2 条带有储能装置的后支撑链和前支撑链组成,通过血氧饱和度检测,受试者的代谢能耗与未穿戴状态相比降低了10%以上[4].在主观疲劳评价领域中,Foster 等[5]提出主观疲劳自觉量表(scale for rating of perceived exertion,sRPE)方法,通过专项和交叉训练验证了该方法的可靠性.在运用sEMG 评价疲劳方面,Morse 等[6]提出将sEMG 特征用于肌肉负荷的判断,该方法为肌肉疲劳阈值(electromyogram fatigue threshold,EMGFT).刘晓光等[7]通过对10 名受试者进行负载递增骑行实验,验证EMGFT对于肌肉疲劳状态评测的有效性.由于步态过程中的运动状况复杂,导致生物信号信噪比的降低,单靠sEMG 信号作为外骨骼评价标准,评价的有效性将会降低,因此需要额外数据进行对比验证,以提高评价准确性.
针对上述问题,结合动作捕捉技术、EMGFT以及sRPE[8]量表评分,对人在穿戴下肢无源外骨骼过程中的疲劳程度进行综合评价.通过设计步态分析对比实验,同步采集实验过程中受试者下肢位置信息、sEMG 信号以及进行sRPE 评分[9],在实验的基础上分别进行下肢稳定性分析、EMGFT计算以及主观评分计算,并对比结果,以此实现基于表面肌电与步态的外骨骼穿戴疲劳评测.为了探究外骨骼使用熟练度以及穿戴者的强壮程度对下肢外骨骼使用效果的影响,在实验中增加熟练对照组以及强壮对照组,进行对比分析.
1 实验方法
为了从主、客观角度综合评价和分析下肢外骨骼使用过程中的疲劳状态,实现外骨骼使用过程中的有效疲劳监测,通过采集18 名受试者实验过程中的受试者下肢位置信息、sEMG 信号以及进行sRPE 评分,设计了步态分析的对比实验,实验方法如图1 所示.

图1 步态分析的对比实验流程Fig.1 Comparative experimental process for gait analysis
1.1 实验内容与目标
在实验前,通过动作捕捉进行步态分析,找出相关发力肌肉并选定sEMG 采集位置.在实验中,同步采集受试者的sEMG 数据以及动作捕捉数据.实验目标为:1)验证EMGFT算法对于无源下肢外骨骼疲劳分析的准确性;2)观察受试者体能强度与外骨骼使用熟练度对外骨骼使用效果的影响.
1.1.1 实验设备 实验采用美国Delsys 公司的Trigno 全无线生理传感器,该传感器可以同步采集sEMG 信号与惯性检测单元(inertial measurement unit,IMU)信号,其中sEMG 采样频率为2 000 Hz,IMU 信号采样频率为75 Hz,角度采集精度精确到小数点后5 位.所使用的外骨骼为中国航天科工集团第十研究院自主开发的无源助力外骨骼.实验使用的跑步机为KPOWER K160A,每档速度为1 km/h.
1.1.2 sRPE 主观量表选择 CR-10 scale 是以10 级刻度进行划分的sRPE 量表,该量表源于瑞典心理学家 Gunnar Borg 发明的主观疲劳评估方法.区别于Borg 6-20 scale 这类粗略对应心率(60~200 bt/min)的划分方式,CR-10 scale 的效果更加可靠与有效.CR-10 scale 经过大量实验数据验证了其结果的稳定性以及广泛适用性[10].该方法已被证实可对多个年龄段和水平层次的运动员进行主观疲劳量化,实验受试者完全满足该量表的评价限制.
根据训练计划研究训练冲量理念(training impluse, TRIMR),受试者的内部负荷可由 “内部负荷=自感疲劳程度评分×运动时长” 来计算[11].自感疲劳程度评分是运动中人体内部对运动负荷刺激的认知,以及多种综合心理因素决定的.受试者进行系统训练可以降低评分误判提高和数据精度,此次实验前通过受试者在跑步机上进行训练,提前体验不同评分量级的主观感受.
1.2 受试人员及环境
选取18 名健康且无不良嗜好的男性受试者参与实验,年龄(25±2)岁,身高(168.0±3.0)cm,体重(62.0±5.0)kg,受试者均身体健康,且无肌肉损伤或其他相关疾病,在近一周内未参加剧烈运动.在正式实验前,告知受试者实验内容,指导受试者学习sRPE 主观量表并评价运动强度.所有受试者均为自愿参与此次实验且实验开始前均已熟悉实验方案、流程和注意事项.
为了对比穿戴与未穿戴2 种状态下疲劳状态的差异,18 名受试者均须先后进行A、B 这2 组步态分析实验.A 组实验为配戴外骨骼实验,B 组实验为未佩戴外骨骼实验,A、B 组实验间隔时间为48 h.为了提高实验可靠性,A、B 这2 组实验各重复3 次,每次间隔时间为72 h.探究外骨骼使用熟练度以及穿戴者的强壮程度对下肢外骨骼使用效果的影响,按照受试者每周体能训练时长、外骨骼使用总时长对受试者状态进行划分,将18 名受试者分为普通组、熟练组、强壮组3 组,每组6 人.实验规定每周体能训练时间少于3 h 且外骨骼使用时长为0 h,受试者为普通组;每周体能训练时间少于3 h,外骨骼使用时长多于20 h 为熟练组;每周锻炼时长大于7 h,但外骨骼使用时间为0 h为强壮组.实验所用负重物为20 kg 标准质量沙袋,并将沙袋置于背包中,同时所有受试者均进行大于4 h 的主观疲劳评分量化训练,受试者分组情况如表1 所示.伦理声明:本研究已经通过贵州大学人体医学实验伦理分委员会审批(批文编号:HMEE-GZU-2021-T005).

表1 外骨骼负载实验分组情况Tab.1 Grouping of exoskeleton load experiments
1.3 实验设计
在行走过程的下肢肌肉发力情况下,实验前通过动作捕捉对步态进行周期划分[12].以人体右侧单侧腿为例进行步态分析,当进行一次完整的步态周期时,存在支撑相与摆动相2 个明显特征,支撑相以目标腿为主要支撑腿,摆动相目标腿为非主要受力.步态过程中支撑相占整个步态周期的60%,摆动相占40%.在一个完整周期里,将步态分为8 个主要特征进行数据采集:首次触地期、承重反应期、支撑相中期、支撑相末期、摆动相前期、摆动相初期、摆动相中期、摆动相末期,如图2 所示.

图2 人体步态周期划分示意图Fig.2 Diagram of human gait cycle division
根据步态分析结果可将下肢在行走过程中肌肉发力分为触地期:(大腿肌群+臀部肌肉)、承重反应期到支撑相中期:(小腿肌群+部分大腿肌群)、支撑相末期到摆动相末期:(大腿肌群+臀部肌肉).选取大腿肌群中的股内肌、小腿肌群中的腓肠肌进行sEMG 数据采集,2 个部位能较好避免衣物摩擦与外骨骼遮挡.根据下肢步态受力分析,实验采用14 个传感器进行数据收集,其中1~9、14 号传感器启用IMU 通道,进行动作捕捉和位置信息采集,10~13 号传感器采集sEMG 原始信号.10~13 号传感器对应部位分别为:10 号左侧股内肌、11 号左侧腓肠肌、12 号右侧股内肌、13 号右侧腓肠肌.sEMG 与IMU 传感器佩戴位置如图3 所示,设置场景图如图4 所示.
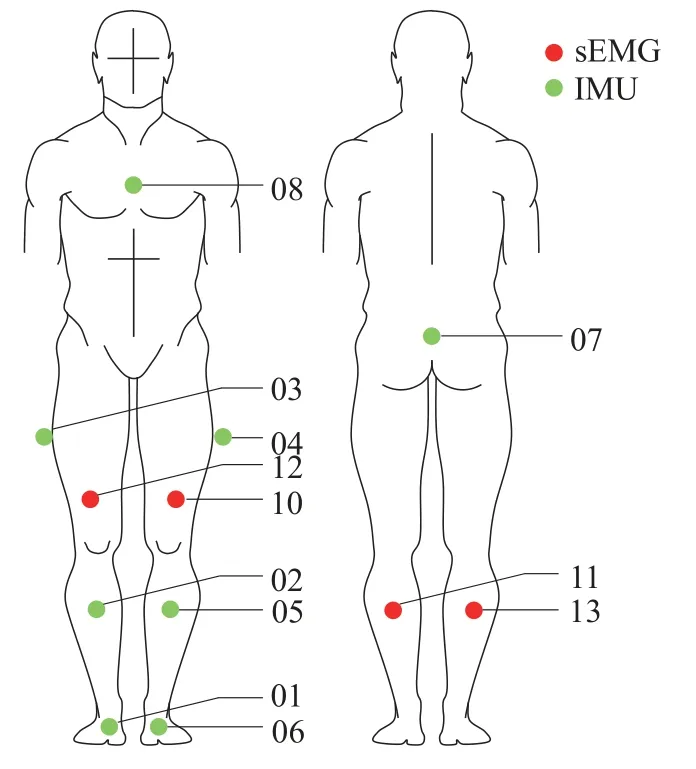
图3 sEMG 与IMU 传感器分布图Fig.3 sEMG and IMU sensor distribution

图4 sEMG 与IMU 传感器设置场景图Fig.4 Scenario of sEMG and IMU sensor settings
1)A 组受试者
该组受试者状态为配戴外骨骼且背负装有20 kg标准质量沙袋的背包,背包置于背板托架上.为了避免因佩戴外骨骼带来的IMU 传感器滑动,将大腿外侧03、04 号传感器与小腿前侧02、05 号传感器利用电工胶带进行加固,其余IMU 与sEMG传感器使用双面贴纸固定.如图5(a)所示.
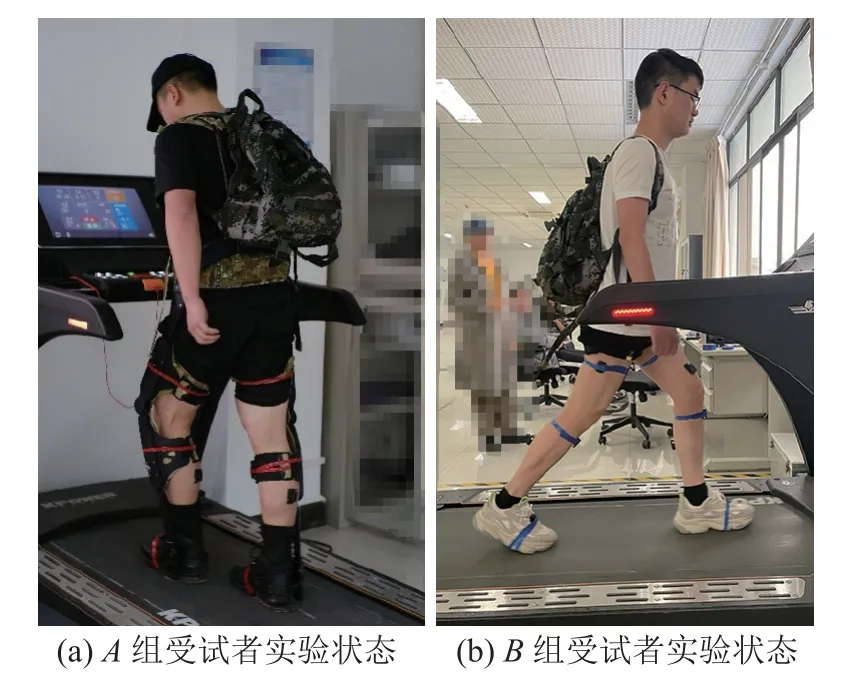
图5 受试者实验状态及环境Fig.5 Subject experimental status and environment
2)B 组受试者
该组受试者状态为未佩戴外骨骼且背负装有20 kg 标准质量沙袋的背包.传感器按照指定位置使用双面贴纸固定,如图5(b)所示.在实验开始前,为了确保受试者处于非疲劳状态,设置A、B 组,实验间隔时间为48 h,休息期间受试者不得进行剧烈运动.在实验前,为了减少信号漂移所带来的误差,提高sEMG 数据精度,刮除受试者股直肌与腓肠肌表面体毛,并使用75%酒精清洁表面皮肤.为了避免受试者因首次操作与负重不适应所发生的意外,要求所有测试对象在开始前1 min 内对实验设备进行试穿与试重.在准备工作结束后,按照图4 配置传感器.18 名受试者分别进行步态训练实验,每位受试者进行6 min 步态训练实验,18 名受试者依次完成后记为一组实验,A、B 组均进行3 组实验,每组实验间隔72 h.实验同步采集3 类原始数据,分别为下肢位置信息、sEMG 的原始信号,以及sRPE 主观量表评分,并且分别按照实验分组对数据进行分类整理,摘除明显异常数据.
2 疲劳特征计算及提取
为了对下肢穿戴外骨骼步态训练过程中受试者的疲劳状态进行主、客观综合分析,在第1 章步态分析对比实验的基础上,分别通过EMGFT算法、下肢稳定性分析方法和sRPE 评分计算方法对实验获取的下肢位置信息、sEMG 的原始信号以及sRPE 主观量表评分原始数据进行计算分析,实现基于表面肌电与步态的外骨骼穿戴疲劳评测.
2.1 肌肉疲劳阈值
sEMG 是通过生物活动期间肌肉产生的生物信号经电极引导捕捉而来,对所捕捉信号进行放大和记录获得有序的一维时间序列信号.sEMG信号采集具有低风险、多靶点以及非损伤性的特点[13].EMGFT是将sEMG 信号的计算确定肌肉疲劳阈值的方法[14].相较于其他传统sEMG 信号疲劳特征分析方法,EMGFT是sEMG 信号的均方根值.对预处理sEMG 信号进行加窗计算,获取肌肉进入无氧阈值的时间点,可以更好反映监测部位的肌肉状态与特征状态.本研究通过EMGFT对A、B 组实验中受试者的股内肌进行疲劳阈值计算,得出作为受试者疲劳程度的量化依据.
在进行EMGFT计算之前,需要对原始sEMG进行预处理,由于人体sEMG 集中于0~500 Hz,在使用低通滤波器去除实验过程中,传感器触碰与摩擦产生的噪声通过49.5~50.0 Hz 陷波滤波器去除工频噪声[15].当采样频率为2 000 Hz 时,样本数据量大,为了有效地计算均方根值(root mean square,RMS),对预处理后的sEMG 数据进行加窗计算.实验时长固定且样本量较大,因此设定固定长度的移动窗(mov)与时间窗(tim)提高结果精度,根据时间长度设定mov 为2 s,tim 为1 s,6 min 实验将获得360 个数据样本.
为了量化分析肌肉疲劳程度,对预处理后的sEMG 信号进行EMGFT计算,具体步骤如下.
1)通过sEMG 信号与处理方法,对实验采集到的A、B 组的sEMG 原始数据进行预处理并建立sEMG 数据集.
2)对经过预处理的sEMG 数据集进行加窗计算,得到RMS 数据集:
式中:Nt为单个时间窗内sEMG 信号的数据数量,i为数据序号,Ei为sEMG 数据集中的第i个数据序号.
3)由于本次实验数据量较大,将所得RMS 数据集分为M、N这2 个部分.将15 个RMS 数据点作为一组记为M1,剩余数据点记为N1,M1、N1的结合作为拟合组1;将15+1 个RMS 数据点作为M2,剩余数据作为N2,M2、N2的结合作为拟合组2,之后以此类推.当Nn的RMS 数据点数量等于M1的RMS 数据点时,将Mn、Nn作为拟合组n.对n个拟合组进行一阶最小二乘拟合,得到2 条拟合直线并用公式kMn·kNn计算每组拟合直线的斜率乘积.
4)将步骤3)中计算的得到的斜率乘积最大的一组数据中拟合直线的交点所对应的时间作为EMGFT,图6 为EMGFT计算原理.

图6 EMGFT 计算原理图Fig.6 Calculation schematic of EMGFT
2.2 下肢稳定性分析方法
为了进行步态过程膝关节的稳定性分析,分别对A、B 组受试者进行动作捕捉,通过大腿与小腿2 处的惯性测量单元(inertial measurement unit,IMU)传感器与Isen 模块输出膝关节外展角角度,所用IMU 传感器角度精度为小数点后5 位,满足实验要求.该外展角α 如图7(b)所示,坐标平面如图7(a)所示.
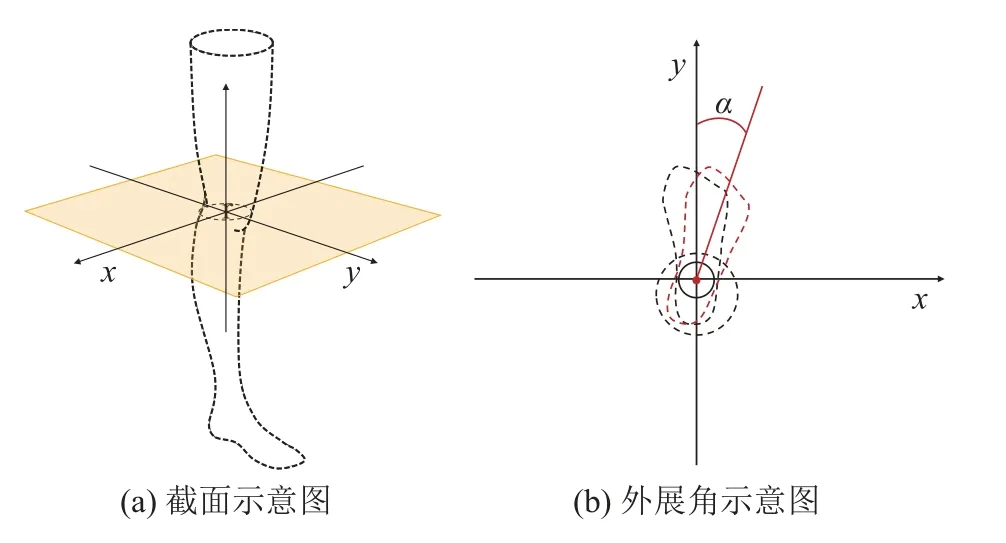
图7 膝关节外展角示意图Fig.7 Schematic diagram of knee abduction angle
在行走过程中,膝关节活动由多块肌肉相互配合发力进行,下肢肌肉进入疲劳状态时会影响膝关节稳定性从而让动作产生偏移[16].方差作为衡量一组数据离散程度的特征值,对单一变量数据集进行方差计算,可以反映该组数据的波动大小,即该组数据的稳定性.膝关节外展角方差计算结果将有效反映实验过程中受试者下肢稳定性状况,即下肢疲劳程度.对实验中所采集动作捕捉数据进行膝关节偏移距离方差S2进行计算:
2.3 主观评分计算方法
下肢疲劳是一种主观感受与客观感受相互影响的多维现象,为了综合评价外骨骼穿戴疲劳状态,需要受试者进行多次sRPE 评分反馈,因此实验使用1.1.2 节中所描述的改进CR-10 scale 采集受试者的疲劳评分.按照10 级对疲劳等级进行划分,如表2 所示.考虑到受试者均有负重并且训练强度适中,为了提高反馈评分进度,将费力与非常费力拆分为2 个评分等级,提高受试者在该感受下的判断空间.根据表2,在6 min 的实验中对每名受试者进行4 次疲劳评分收集,分别为0、2、4、6 min.将每小组均值作为sRPE 评分特征值.
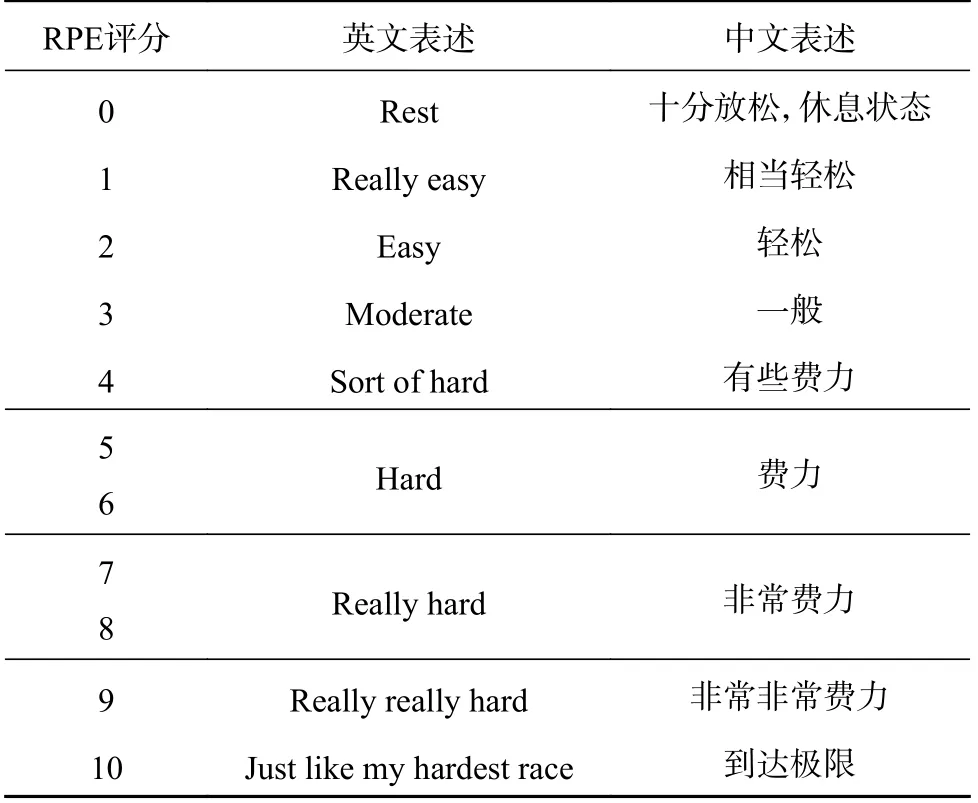
表2 CR-10 scale 疲劳程度对照表Tab.2 CR-10 scale Comparison table of fatigue degree
3 实验结果分析
3.1 EMGFT 计算结果
根据2.1 节中所述的预处理方法,对原始sEMG进行低通滤波与陷波滤波处理,随机挑选一名受试者的原始sEMG 信号预处理(R)结果如图8 所示.通过2.1 节中对预处理过后的sEMG 信号进行EMGFT计算,随机挑选一名受试者,实验结果如图9 所示,其中sEMG 原始信号为G,EMGFT到达时间为t,Fr为频率.各组EMGFT均值如表3 所示.

表3 A、B 组的EMGFT 平均到达时间与变化时长Tab.3 EMGFT average arrival time and duration of change in group A and B

图8 sEMG 信号预处理过程时域和频域图Fig.8 Time and frequency domain diagrams of sEMG signal preprocessing
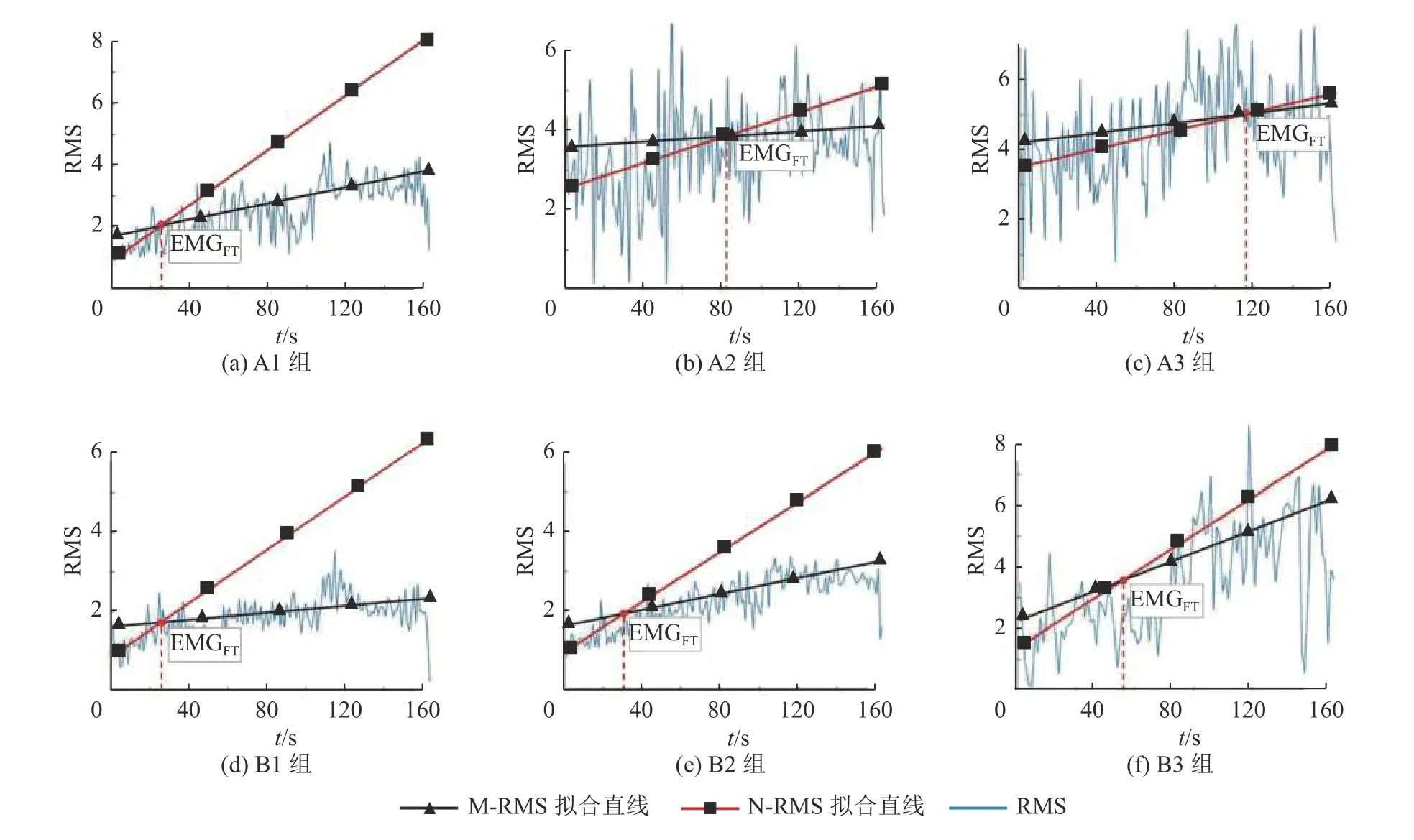
图9 RMS 拟合直线交点与EMGFT 到达时间的变化趋势Fig.9 RMS fitting of line intersections and trend of arrival time of EMGFT
由图8 可知在A、B 组实验中,外骨骼可以有效延缓负载状态下受试者股内肌到达疲劳的时间,且该套外骨骼对于A2、A3 的影响相较于B2、B3 组t明显延后,对于A1 组与B2 组,效果不佳.A1 组与B1 组相比,A1 组t仅比B1 组平均延后1.3 s,该结果表明非熟练者使用外骨骼难以起到有效缓解疲劳的作用;A2 组与B2 组对比,A2 组t相比B2 组平均推迟了51.7 s.由此可见,熟练使用外骨骼将极大推迟t;A3 组与B3 组对比,A3 组t相比B3 组平均推迟了44.6 s,由该组结果可知身体素质较高者使用外骨骼同样能起到延缓疲劳的作用.
在A 组实验中,相较于A1 组,A2 组受试者对外骨骼的使用效果提升了211%,A3 组受试者对外骨骼的使用效果提升了333%.A2 组相较于A3 组,其使用效果提升了41%.横向对比A 组显示,身体素质和熟练度是决定外骨骼使用效果的相关因素,在相同身体素质情况下,熟练度起到决定性作用.
在B 组实验中,B2 组的EMGFT与B1 组相差6%,B3 组相较于B1 组的EMGFT延后157%.B3 组相较于B2 组的EMGFT延后140%.横向对比A 组,结果表明身体素质较好的实验对象晚达到疲劳时间,同时B2 组与B1 组身体素质相当,在不借助外骨骼的情况下EMGFT相当.
3.2 膝关节稳定性分析
对膝关节进行2.2 节中的稳定性计算,实验时间较长,获取数据量较大,因此对A、B 组数据进行加窗,并计算其方差S2.设时间窗为2.5 s,移动窗为5.0 s.获取受试者膝关节偏移量方差,并对该方差进行最小二乘法曲线拟合,同时计算该直线斜率P.随机挑选一名受试者的实验结果进行展示,如图10所示.将A、B 组的结果进行对比,穿戴外骨骼进行步态负载训练时下肢稳定性均高于未穿戴外骨骼,A 组方差拟合直线斜率均小于B 组,证明该外骨骼可以有效缓解因疲劳引起的膝关节抖动加大.

图10 膝关节偏移量方差的拟合直线与拟合直线的斜率Fig.10 Fitting line and slope of fitting line for variance of knee joint offset
纵向对比A1 组与B1 组,P下降了67.8%;A2 组与B2 组,P下降了77.2%;A3 组与B3 组对比,P下降了84.1%.该组结果对比表明,外骨骼对于A1、A2、A3 组成员下肢稳定性均有稳定提升,并且与身体素质,熟练度等相关因素相关性较小.对A 组进行横向对比,A2 组相较于A1 组,P下降了25.0%;A3 组相较于A1 组,P下降了60.7%;A3 对比A2,P提升了91.0%.该结果显示,高熟练对下肢稳定性的影响较低,但较好的身体素质对下肢稳定性的影响较大.横向对比B 组,B2 组相较于B1 组,P上升了8.0%;B3 组相较于B1 组,P下降了20.7%;B3 对比B2,P提升了25.0%.在无外骨骼穿戴的负载步态实验中,身体素质与下肢稳定性有直接关系.
3.3 sRPE 对照反馈
根据2.3 节中所述CR-10 scale 对A、B 组进行主观疲劳评分收集,并对各小组sRPE 特征值(F)进行提取.随机挑选一组受试者数据进行展示,结果如表4、5 所示.实验每2 min 进行一次评分收集,结果表明,穿戴外骨骼负载实验使得sRPE 评分平均下降28.5%,并且A3 与B3 组均保持在相对轻松的主观感受中,同时A2 组测试结果表明该组通过使用外骨骼也达到了相对轻松状态.
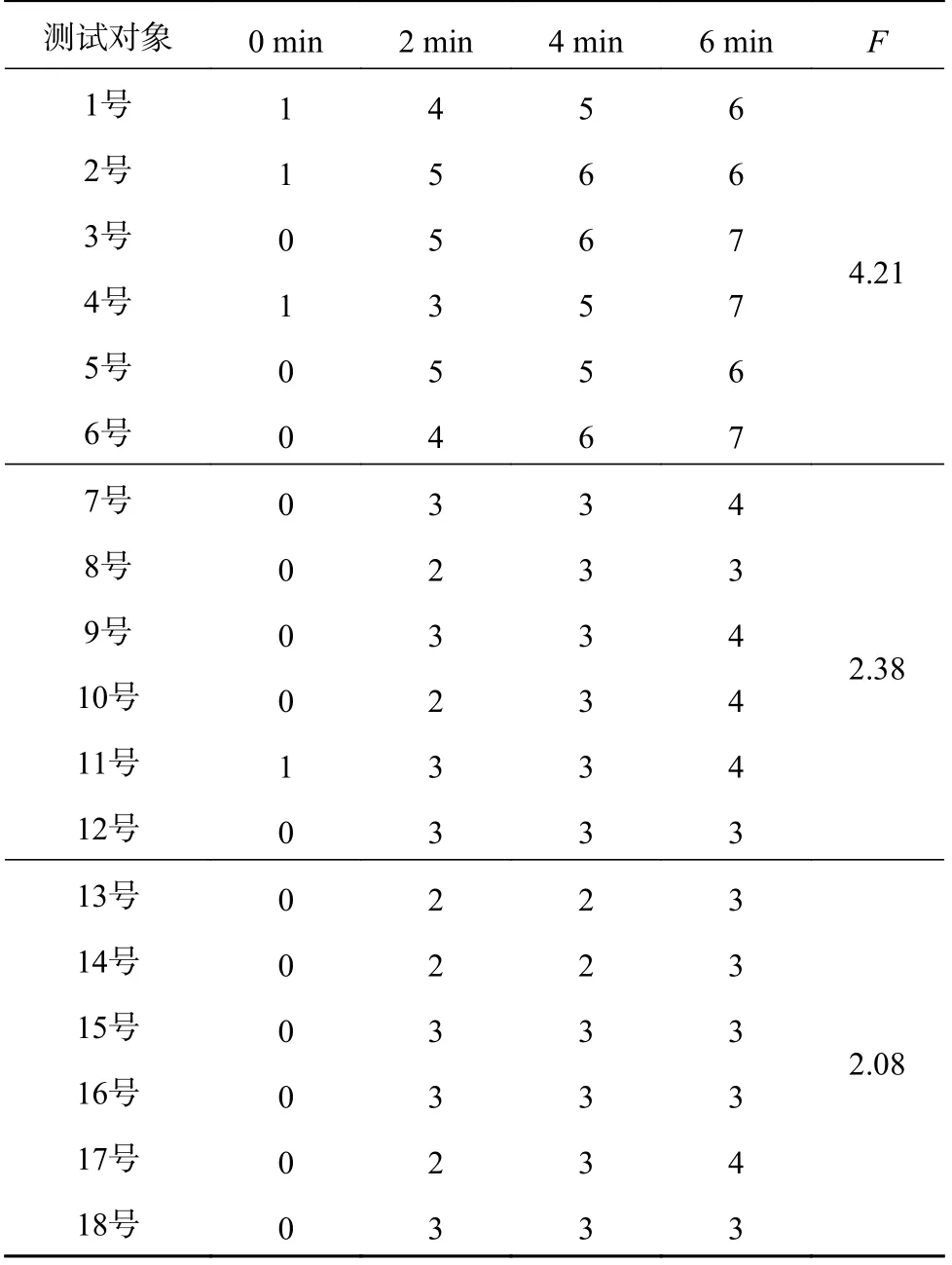
表4 A 组穿戴外骨骼且负重sRPE 评分表Tab.4 Group wears exoskeleton and bears weight sRPE score

表5 B 组穿戴外骨骼且负重sRPE 评分表Tab.5 Group B wears exoskeleton and weight-bearing sRPE score
在A 组中,在使用外骨骼的情况下,A2 组相较于A1 组,F下降了43.5%;A3 组相较于A1 组,F下降了50.5%;A3 组相较于A2 组,F下降了12.6%.在B 组中,B2 组相较于B1 组,F下降了15.1%;B3 组相较于B1 组,F下降了53.1%;B3 组相较于B2 组,F下降了44.8%.结果表明,外骨骼对非熟练使用者有主观上的疲劳减轻作用,熟练使用后可进一步放大疲劳缓解的效果.
3.4 特征值对比
对3 组特征值进行汇总并进行分组对比,外骨骼在负重状态下对受试者的辅助提升效果如表6 所示.

表6 各组特征值与总体提升率Tab.6 Individual group features and overall enhancement rate
由表6 可知,所用外骨骼在3 个方面对受试者起到辅助作用.在下肢疲劳方面,熟练使用外骨骼有效推迟EMGFT,平均推迟了42.9%.虽然A3 组配戴外骨骼同样可以延缓EMGFT,但是相较于B3 组其提升效果低于A2 与B2 组;在下肢稳定性方面,该套外骨骼表现效果突出,稳定性综合提升了75.8%.A3 组与B3 组效果相对突出,因此该套外骨骼可以有效提高下肢稳定性,同时有效缓解疲劳;在主观疲劳方面,外骨骼对受试者的主观疲劳感受平均减轻了30.3%,同时熟练使用外骨骼可以进一步降低主观疲劳感受.
4 结 论
1)在18 名受试者进行无源下肢外骨骼的负载对比实验中,通过sRPE 评分与膝关节稳定性对EMGFT值进行主、客观验证,3 组数据在不同分组条件下均具有相同趋势,其特征值具有较强相关性,可以作为评价标准.
2)通过对实验中各组数据进行特征提取,实验所使用的无源下肢外骨骼在熟练使用的情况下,有效降低人体在负载状态行走中产生的肌肉负荷.根据受试者反馈发现,当外骨骼通过背板与连接部位缓解压力时,肩部感到较为明显的局部压力会影响主观疲劳评分,因此人机关系优化可能会改善局部压力所产生的主观疲劳.
3)在实验中,A3 与B3 组均表现出较高下肢稳定性与较晚到达EMGFT值的特点,可以判断受试者更晚进入疲劳状态,因此较好的身体素质将有效提高外骨骼使用效果.在所有受试者反馈中,均提到外骨骼背部负重板影响动作灵活性的问题.
本研究通过验证所提方法的可行性与有效性,为外骨骼使用效能的评价与优化方法选择提供参考.在接下来的相关研究中,需要更加关注样本差异性以及基于此评价的外骨骼升级优化.
猜你喜欢
科学大众(2024年5期)2024-03-06 09:40:34
军事文摘(2024年6期)2024-02-29 09:59:38
中共云南省委党校学报(2022年1期)2022-04-26 13:55:44
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
高师理科学刊(2020年2期)2020-11-26 06:01:16
小学生优秀作文(低年级)(2020年4期)2020-07-24 08:31:16
电子制作(2018年18期)2018-11-14 01:48:04
自动化学报(2018年6期)2018-07-23 02:55:42
法律方法(2018年2期)2018-07-13 03:22:06
发明与创新(2015年33期)2015-02-27 10:40:00