
基于数字孪生的多能源送端系统能量耦合协同优化控制
2023-10-21 03:10陈远东张海龙史文江汪振宇阎乃臣顾大可
可再生能源 2023年10期
陈远东,孟 辉,张海龙,史文江,张 超,汪振宇,阎乃臣,顾大可
(1.国网内蒙古东部电力有限公司内蒙古超特高压分公司,内蒙古 锡林浩特 026099;2.东北电力大学,吉林吉林132012)
0 引言
在多能源送端系统中,由于不同能量流传输时间尺度的不同,以及各能量传输通道的延时问题,导致在某一时刻管道首端输入流量与末端流出流量存在差异,在进行优化控制过程中使得实时能量流响应难以与负荷的实时需求维持平衡[1],[2]。
为实现多能源送端系统的外送能量的稳定,国内外科研人员进行了大量的研究工作。其中数字孪生技术的发展在一定程度上解决了多能源系统中能量流间的协调控制问题[3],[4]。文献[5]基于数字孪生模型对风力发电机状态预测和健康管理进行了研究,但无法实时更新数字孪生模型。文献[6]通过数字孪生算法与硬件相结合,可进行高频功率变换器的状态感知,但实际应用难度较大。文献[7]基于建筑信息模型技术,建立了电网设备的数字孪生系统,可视化较强但不能进行仿真计算,无法进一步对设备状态进行了解。文献[8]采用自适应简化智能优化学习方法,通过模仿人类学习过程来更新解决方案并搜索最优解。文献[9]将自适应简化智能优化学习方法与遗传算法、二元和谐搜索算法在计算性能等方面进行了对比分析。文献[10]提出一种基于数字孪生的智能控制方法,将迭代学习控制与模型预测控制相结合,在一定程度上提高了多能源间的协调控制能力。文献[11]针对电力系统的未知变量以及不确定变量,采用改进的学习递推最小二乘辨识算法,将数字孪生方法与传统迭代学习控制相结合,对多能源系统中能量流的协调控制起到较好的效果。
以上文献针对数字孪生技术以及数据处理等进行了研究,但并未针对综合能源系统进行数字孪生分析与应用。本文通过数字孪生技术感知系统实时状态参数,结合数字孪生模型架构,建立多能源送端系统数字孪生控制架构模型;通过建立多能源系统能量流信息耦合模型,实现多能源系统中信息的快速感知、传输、控制。最后,在所建立的基于数字孪生的多能源控制系统中,通过外送数据及多能量流传输模型的快速优化控制,实现送端系统输出功率的稳定。充分利用有效数据,设计合理的控制器,实现多能源送端系统的能量流协同控制,提高多能源送端系统能量流供应的稳定性。
1 多能源送端系统数字孪生架构
结合数字孪生模型的传统架构,针对多能源系统能量流传输的特点,设计了多能源送端系统的数字孪生模型,主要包括送端系统的物理层、感知层、传输层、数据层、计算层、应用层[12],[13]。物理层主要包括数字孪生建模的对象,即多能源送端系统中的可再生能源发电机组以及能源耦合设备等。感知层的功能是感知系统的状态,基于数据传感器可以得到表征多能源系统稳定运行特征的状态量。传输层的功能是将感知层采集和识别的信息进一步传输到数据层。数据层的功能则是对采集到的数据进行处理分析。计算层是数字孪生建模的核心,通过将多能源送端系统能量传输物理模型、校正控制算法、仿真计算相关内容进行集成,形成数据驱动以及模型驱动的混合计算方法。应用层为最顶层,通过模型的实测数据以及模型的仿真结果进行相应决策优化,然后将决策优化结果存储到数据层,可以直接作用于物理层进行决策指导。多能源送端系统数字孪生架构如图1所示。
1.1 数字孪生模型
多能源送端系统数字孪生模型采用实时在线运行模式,数字孪生模型与多能源送端系统之间建立实时信息交互传输,能够根据送端系统的当前状态数据实时感知实际系统能量供需状态,满足模型对数据的要求。在基于模型驱动与数据驱动的混合建模方法中,模型驱动主要体现在多能源系统的能量流的模型计算,数据驱动主要是将采集到的送端系统的外送功率及当前系统的发电量作为输入。采用“多能源各子系统参数辨识+多能源耦合的整体参数校正”的控制方式,通过参数辨识方法得到多能源子系统中的运行参数,可迅速找到与实际运行参数相近的初始数值,然后进行系统整体的参数校正。多能耦合整体参数校正具体过程如图2所示。
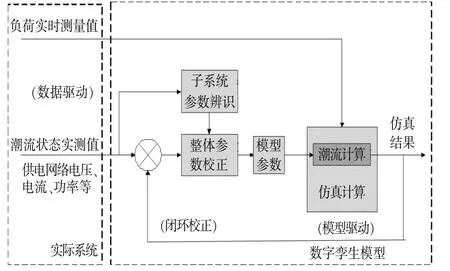
图2 多能耦合整体参数校正Fig.2 Multi-energy coupled integral parameter correction
基于数字孪生技术,可以实现送端电网状态量的虚实映射。首先,通过对送端电网中获取到的物理量进行虚实映射,建立送端电网运行状态的数字孪生模型。其次,根据送端电网中电、热、气的供需关系建立电力送端系统能量模型,将电、热、气的输出功率值添加到所建立的几何模型,并建立数据接口,构建状态量数据信号与孪生模型的联系,使实际运行的多能源送端系统与虚拟的送端电力系统进行融合。最后,采用“条件-状态-事件”模式来构建送端系统的数字孪生模型。
式中:FU表示数字孪生送端系统多能源装置;TF表示数字孪生送端系统多能源装置的实际数据集合;TU表示实际送端系统多能源装置;⇌表示实际送端系统多能源装置与数字孪生送端系统多能源装置对应映射关系;IP表示数字孪生送端系统多能源装置几何模型集合;YH表示数字孪生送端系统多能源装置物理属性集合;RT表示数字孪生送端系统多能源装置运行逻辑模型集合;MK表示数字孪生送端系统多能源装置运行动作行为集合;←表示送端系统多能源装置的运行逻辑、运行行为在数学模型中关联集成;><表示自然连接;WE表示须满足的数字孪生送端系统多能源装置运行状态的实时属性集;PO表示匹配的状态模式;BN表示状态模式与送端系统多能源装置运行状态实时属性集匹配时送端系统多能源装置运行行为;→表示条件执行指令。
1.2 考虑时延特性的燃气管网传输模型
在某一时间节点,天然气管道首端输入流量与末端输出流量存在一定差异,天然气管网响应后由首端流到末端所需的时间称为时延,天然气传输时延与自身管道参数及压力有关。对任意两节点i,j之间的管道容量进行计算:
式中:V为燃气管道的固定容积;T0为系统的额定温度;Z0为额定条件下的压缩因子;P0为额定条件下燃气管道的压力;T为燃气管道中燃气温度;p为燃气管道的压力;Z为压缩因子的计算值;L为燃气管道的长度。
为精确得到燃气管道传输延时时间,设管道长度为dl,则燃气传输的运动方程为
式中:λg为燃气系统中燃气管道的摩擦系数;υ为燃气的流速,m/s;D为燃气管道的直径,mm;ρ为燃气密度。
根据连续性方程以及气态方程,可得:
式中:M为燃气质量流量;R为气体常数。
式(5)中的温度T可表示为
式中:p1,p2分别为管道首端、末端压力;T1,T2分别为管道首端、末端温度;Z1,Z2分别为管道首端、末端的压缩因子;n为气体的摩尔质量。
将式(4),(5)带入式(2),可得:
将式(7)代入式(2),可得:
燃气管网的时延tde可表示为
式中:t′de为管道传输控制的时延;ci,cj分别为天然气管网节点i,j处的燃气流量。
1.3 考虑热惯性的热力管网能量流传输模型
多能源系统中热力管网可存储大量的热能,并且热力媒质在传输过程中存在一定的时延特性,热力媒质在进行定径传输和变径传输过程中的传输速率也存在一定差别。因此本文研究热力系统的热惯性主要考虑热力管道的热延时及热损耗两个因素。
在热力传输过程中,热负荷处温度的变化较热源处媒质温度的变化具有一定的时延。热力媒质从管道首端传输到管道末端的时延可表示为
式中:thdel为热力管道供热时延;khdel为热力媒质的热能传输延迟系数;Lh为热力媒质所流经的管道长度;υ为热媒质的流动速率。
在热能传输消纳的过程中,热负荷具有较大的热惯性,使得热能不能在短时间内发生突变,在停止供热后负荷温度也能够在一段时间内保持相对稳定。因此,本文建立了基于时间尺度的热力管网热损耗模型:
式中:ΔTlos为热力管道中媒质的温降;Tst(t)为t时刻燃气管道的首端温度;Tou(t)为t时刻管道外部的环境温度;η为热力管道的热传输效率;Ch为热媒质的比热容;m为热力管道的流量;L为热力管道的长度。
通过以上分析可以得到热力管道传输时延与热力损耗关系:
式中:Ten(t)为热力管道由首端传输到负荷端的温度。
热惯性可表示为
式中:QLR,t为热负荷在t时刻消耗的热能;μ为热力管道单位长度上的传热系数;C为热媒负荷热容;S为热负荷的额定功率;Δt为控制过程中的调度时间间隔;分别为t,t-1时刻热负荷所处的室内温度;为环境温度。
1.4 多能源系统能量流信息耦合模型
电网、热网、气网与多能流信息通信网络节点度数分别为poide(pi),poide(hi),poide(gi),poide(cj),由于电网、热网、气网中能量的流动具有方向性(图3),分别以节点pi,hi,gi为起点的链路数目为

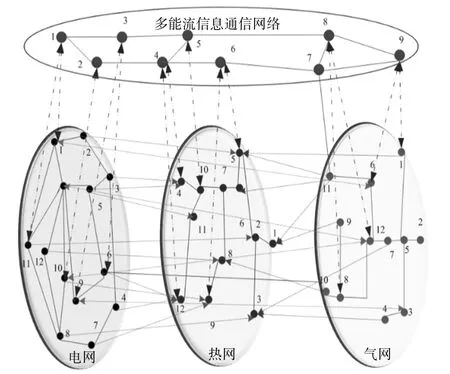
图3 多能源系统能量流信息耦合模型Fig.3 Information coupling model of energy flow in multi-energy system
为更加精确地量化电、热、气各节点在整个多能源系统中的重要程度及各能量流之间的相互转化情况,应确定多能源系统中各节点pi,hi,gi对(pj,pk),(hj,hk),(gj,gk)能量流以及信息流的利用情况,计算式为

为了明确系统中每个节点的重要程度以及节点的效率,可以通过式(17)计算得到系统中各节点的利用效率:
式中:Apij,Ahij,Agij分别为在最短路由控制方式下,(pi→pj),(hi→hj),(gi→gj)所经过的节点数。
根据式(15)~(17),可以将多能源系统中的节点的出、入度关系,能量流、信息流的利用情况及节点的利用效率由以下矩阵进行表示:
2 多能源送端系统能量耦合控制
多能源送端系统能量耦合控制主要由感知、传输以及控制3个阶段组成。首先,感知送端系统能量的实时状态变化;然后,将感知数据通过可靠传输系统进行交互,传送到控制器;最后,控制器以多能源系统实时能量平衡为目标发出控制决策指令。多能源系统能量耦合控制框架如图4所示。在感知送端系统能量实时状态变化的阶段,为得到更为准确的送端系统能量需求数值,对多能源系统中的能量、温度及压力等信号建立多能源异构感知模型,感知终端i所得的需求变量可表示为
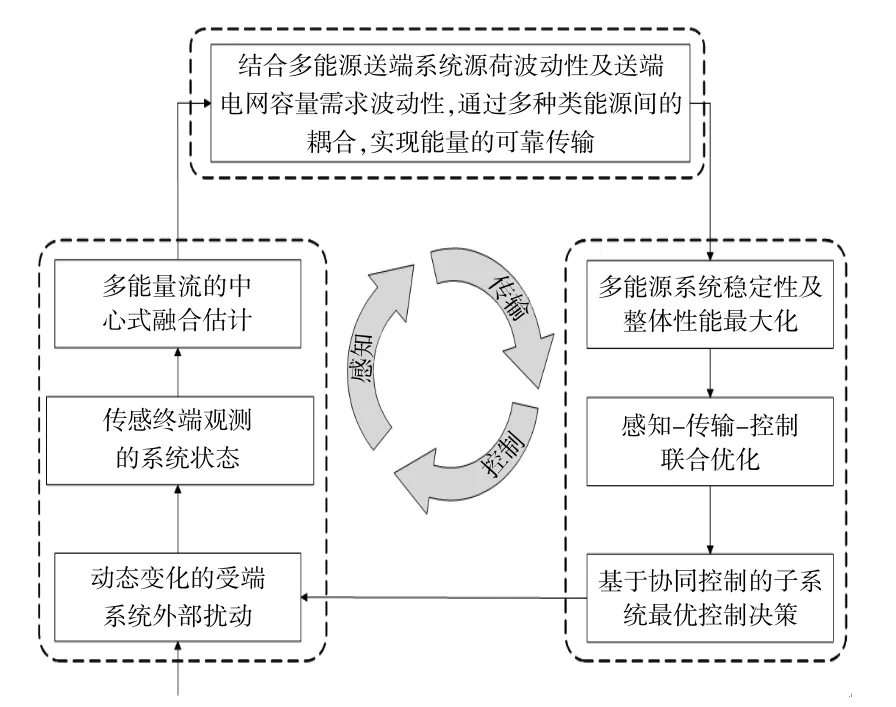
图4 多能源系统能量耦合控制框架Fig.4 Energy coupling control framework of multi-energy system
式中:Zi为多能源系统终端的数据观测矩阵;ni(t)为检测过程中的噪声干扰,对于单个感知终端α为不可观向量;Φi为感知终端集合。
多能源系统主要由低压配电系统、天然气配气系统,区域热力系统组成。在多能源送端系统各子系统控制过程中,须要根据系统运行方式及负荷需求,在送端系统装机容量一定的情况下,考虑可再生能源出力波动,进行能量流的合理分配。在能量耦合控制中,首先通过数字孪生技术将实际系统能量需求变量进行处理得到系统的模拟需求量,然后通过整体参数校正及潮流计算,实现多能源送端系统的协调控制。多能源送端系统中各子系统的控制如图5所示。
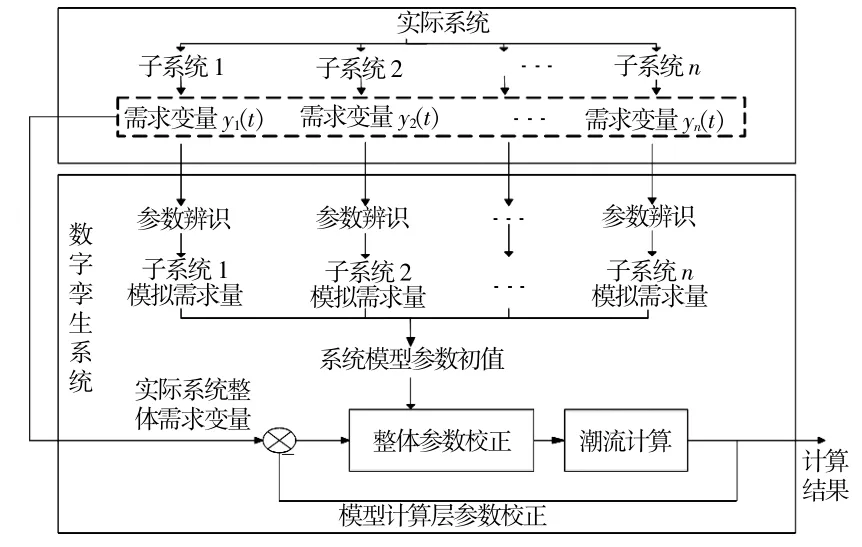
图5 多能源送端系统各子系统控制流程Fig.5 The control process of each subsystem of the sending-end multi-energy system
3 算例仿真
本文选取我国东北某多能源送端系统为仿真对象,不同时间段的多能源负荷需求如图6所示,多能源送端功率需求如图7所示。在可再生能源出力发生波动的情况下,本文以图6,7中的数据为基础对多能源送端电网的输出功率稳定性进行仿真分析,对多能源间耦合控制进行协调优化。
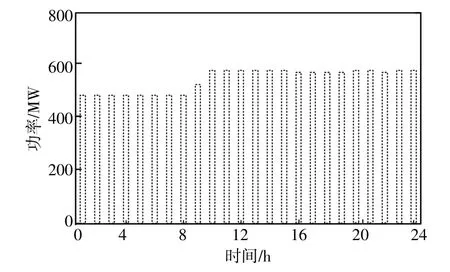
图6 多能源负荷需求Fig.6 Multi-energy load demand
为验证本文所提方法的有效性,在送端系统中负荷容量较少且可再生能源装机容量较高的情况下,对提出的数字孪生控制方法进行验证。将考虑多能量流耦合及传输时延的控制方法,与未考虑多能量流耦合及传输时延的控制方法进行对比分析。图8显示了送端系统内两种控制方式下的机组出力曲线。

图8 不同场景下机组出力曲线Fig.8 Unit output curve in different scenarios
在两种情况下,当送端系统中发电功率出现波动时,输出功率波动情况如图9所示。

图9 输出功率波动对比结果Fig.9 Comparison results of output power fluctuation
由图8,9可以看出,在采用本文提出的能量耦合控制方法后,送端系统机组的出力明显降低,调峰压力明显减小,且当送端系统发电功率出现波动时,输出的功率波动幅度减小,明显趋于稳定。因此,本文提出的能量耦合控制方法是有效的。
4 结束语
本文针对多能源送端系统中能源转化以及传输过程中的时延问题,建立了基于数字孪生的多能源送端系统能量控制模型,通过送端多能源间的协调配合,实现外送能量流的稳定。提出的基于数字孪生的多能源送端系统能量耦合控制方法,可在保证送端系统能量稳定的前提下,通过数字孪生技术,结合不同能量流的传输时间尺度差异,实现安全可靠的能量外送。通过仿真结果可以看出,在送端系统中可再生能源出力发生波动的情况下,通过多能源间的耦合,可以提高整体系统的稳定性。
猜你喜欢
无线互联科技(2022年4期)2022-05-11
数学物理学报(2022年2期)2022-04-26
建材发展导向(2022年6期)2022-04-18
煤气与热力(2021年10期)2021-12-02
计算机工程与设计(2021年11期)2021-11-20
冶金设备(2019年6期)2019-12-25
中国宝玉石(2018年3期)2018-07-09
网络安全与数据管理(2017年24期)2017-12-29
大型铸锻件(2015年5期)2015-12-16
湖南理工学院学报(自然科学版)(2014年1期)2014-02-28
