基于掌子面三维几何图像计算Jv值的方法研究
2023-10-18 04:08仇文革王先毫白衡斌
隧道建设(中英文) 2023年9期
曹 勇, 杨 川, 仇文革, 王先毫, 白衡斌, 凌 鹏
(1. 中铁上海设计院集团有限公司, 上海 200070; 2. 皖赣铁路安徽有限责任公司, 安徽 合肥 230000; 3. 成都天佑智隧科技有限公司, 四川 成都 610031; 4. 西南交通大学 交通隧道工程教育部重点实验室,四川 成都 610031; 5. 中铁十局集团第三建筑有限公司, 安徽 合肥 250101)
0 引言
隧道围岩地质情况影响着施工进度与安全,故地勘资料的准确性决定了隧道支护设计的合理性。由于隧道地质情况的复杂多变且受技术、经费等限制,地勘资料与真实地质情况往往有较大的出入,导致施工参数设置不合理,造成工期延误和经济损失。通过分析开挖揭露的掌子面围岩并确定围岩等级,对施工参数动态调整意义重大。
围岩完整度是确定围岩分级的重要参数,掌子面围岩结构面信息的获取是围岩完整度判识的基础。传统的围岩结构面信息获取方式是采用地质素描,但该方式存在数据采集困难、作业效率低等问题;同时,其测量结果受人员经验影响,不利于掌子面围岩分级评价[1]。
随着非接触测量方法的发展,有学者利用数字照相和激光扫描等技术进行围岩信息的获取和完整度的判识。在数字照相技术方面: 冷彪[2]采用单目视觉法研究了掌子面图像地质信息的提取,并实现了已开挖部分隧道地质结构的可视化; 王凤艳等[3]应用数字近景摄影测量建立产状解算模型对岩体结构面几何信息进行了研究,确定了模型的精度要求;杨民等[4]在数字图像上通过像素测量方式能够准确、快速获取结构面间距; 陈建琴等[5]通过单相机双目技术建立高精度掌子面三维模型,实现了岩体间距和粗糙度的自动化提取;谢壮等[6]采用多视几何法获取掌子面岩体表观信息,提高了数据采集的灵活性;李赤谋等[7]采用Unet神经网络算法对掌子面图像节理迹线自动识别,结合围岩强度信息,实现了掌子面围岩分级。但数字照相技术需手动控制相机采集掌子面全景图像,存在数据采集时间长和图像重叠区域不均等问题。在隧道复杂、恶劣的工作环境中,较长的数据采集时间会使同组图像质量难以保证以及会出现图像上同名点难以匹配等问题[8]。在激光扫描技术方面: 刘昌军等[9]、郭登上等[10]、葛云峰等[11]应用三维激光扫描获取岩石边坡点云,采用模糊聚类算法、区域生长算法实现了对围岩结构面产状的提取;荆洪迪等[12]在地下矿山工程中,将三维激光扫描和地质构造分析结合,实现了点云数据的结构面自动获取;杨辉[13-14]将掌子面三维点云数据进行三角网重建,结合结构面空间迹线特征,采用最小路径代价算法实现了结构面迹线提取。但当前以Faro等为代表的隧道激光扫描设备存在体积较大、携带不便的问题,且存在无法获取岩体表面纹理信息的缺陷。综上所述,目前大多学者对于非接触测量的研究仅依托于单一技术手段,其在现场应用中存在一定的缺陷。
随着激光扫描小型化设备的发展,其在车载激光雷达[15]、无人机避障[16]和输电线路数据采集[17]等方面有了较多的应用。基于此,本文提出一种将小型激光扫描设备、相机和云台结合的便携式掌子面围岩信息采集设备,可实现掌子面围岩信息的快速采集。将激光扫描可获取探测物体表面三维坐标的特点与相机可获取目标形状、颜色信息的特点相结合,建立具有高精度和实景色彩的掌子面三维模型,并基于卷积神经网络算法建立一种隧道掌子面围岩完整度的自动化判识方法,以期为隧道地质信息编录提供支持。
1 掌子面三维模型构建方法
1.1 掌子面信息采集
在建立高精度掌子面三维模型前,需采集掌子面围岩地质信息数据。使用自主研发的激光雷达与相机的组合设备——智隧慧眼和外置灯光作为数据采集工具(见图1)。相机图像数据处理基于多视几何投影技术,相邻图像的重叠率需大于30%,故将设备与云台结合,实现数据自动采集,降低人为因素干扰。为保证数据采集质量,减少隧道粉尘对成像质量的影响,选择在出渣排险后、架立拱架前进行数据采集。采集时,仪器可在距掌子面5~10 m、边墙1 m以上的区域内任意摆放。摆放后,借助水平气泡基本调平设备,并使设备正面对准掌子面方向,采集过程中需避免人员遮挡和局部强光照射掌子面。数据采集示意如图2所示。

图1 数据采集设备

图2 数据采集示意图
1.2 三维模型构建
使用SMART EYE软件对掌子面围岩信息进行处理,建立高精度三维实景模型。针对掌子面图像数据,采用SFM(structure from motion)技术,通过将多张掌子面图像中的特征点匹配,利用摄影定理计算得到相机的位置等场景信息,再将场景信息与原始图片相结合,得到物体的三维点云,最后使用泊松表面重建算法(poisson surface reconstruction)将点云连接形成三角网格进而构建三维曲面,完成图像三维重构。图像模型通过光学成像的方式获取,可准确记录掌子面的颜色状态,具备很高的平面像素精度。
激光雷达利用飞行时间(time of flight)探测方法可以准确计算发射及接收电磁波的时间,测量被测目标距设备的距离,获取围岩表面的三维点云坐标,建立与隧道掌子面实际尺寸相同的三维点云模型,赋予模型三维矢量信息。
利用围岩特征信息标定的方式获取图像重构模型和激光模型的内外参对应关系,通过矩阵转换的方式将图像模型投射到点云空间坐标系中,使图像模型和点云模型相结合,统一坐标系。将开挖里程与模型进行匹配,实现模型在设计线路中的定位。掌子面重建模型如图3所示。

(a) 图像三维模型
1.3 掌子面分割
经过三维重建处理后得到的模型由初期支护、边墙和掌子面组成。为便于分析开挖轮廓内的掌子面围岩信息,需将模型进行分割。在确定模型和设计轮廓的尺寸关系后,结合里程信息对掌子面三维模型进行定位,以确定模型与设计线路里程的对应关系。利用现场施工提供的初期支护里程,完成模型初期支护的分割。利用掌子面的三角面网格法向量与设计线路有明显的平行关系,边墙的三角面网格法向量与设计线路有明显的垂直关系,完成对模型中掌子面和边墙的分割。掌子面三维模型分割如图4所示。

(a) 三维模型
2 掌子面围岩节理识别
2.1 模型结构面识别
基于不同结构面的法向量朝向有较大差异的特点,可对三维掌子面点云模型的结构面进行识别。其实现方式如下: 1)将掌子面模型结构面分割为不同的封闭小区域,采用聚类算法将法向量相同的封闭区域进行聚合,不同聚合区域之间存在的边界即为结构面的三维迹线; 2)通过计算三维结构面区域内点云的平整度和结构面迹线的平滑度,剔除加权和小于设定阈值的三维结构面; 3)采用投影算法,将三维迹线投影至掌子面二维图像上,即可得到掌子面的二维结构面迹线。结构面识别和投影如图5所示。
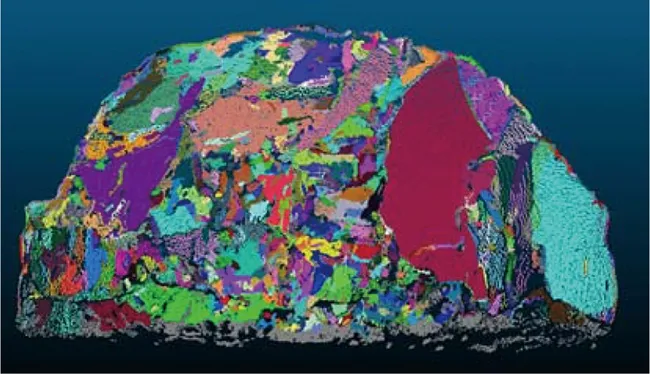
(a) 三维识别
2.2 卷积神经网络节理识别训练
传统的数字图像处理技术和机器学习算法利用轮廓提取和特征点匹配等方式对掌子面结构面进行识别,但针对的场景单一、适用范围小、正确率低下,不同光照、不同采集角度都会对图像处理的结果产生很大影响,且提取得到的轮廓包含了大量的噪点,如挖掘机开挖痕迹等。而卷积神经网络是目前进行图像模式识别研究最有效的手段之一,可以完成复杂图像特征的抽取,故本文选择卷积神经网络训练软件完成对掌子面图像中围岩节理迹线的识别和提取。训练流程如下。
1)训练数据集建立。地质工程师对生成的掌子面图像进行结构面迹线标注,同时剔除机械划痕和爆破等人为影响因素。标注的结构面迹线图像数据以文本方式记录,将标注后的文本和图像汇总,与原始图像一起形成数据集。结构面识别训练如图6所示。

(a) 原始图像1 (b) 迹线标注1
2)数据集扩展。现场采集的掌子面图像尺寸较大,直接用于训练对硬件设备有较高的要求,需要将图像裁剪为小尺寸图像,并将不含结构面迹线标注的掌子面图像剔除。为增加数据集的多样性,将训练图像进行随机旋转,翻转,镜像、亮度与饱和度调节等操作,并在处理图像时,将标注的图像数据共同处理,以保持一致性。
3)卷积神经网络训练。卷积神经网络是通过前向计算输入与权值的内积得到输出,通过反向传播算法不断迭代更新权值,结合梯度下降方法,最后得到整个网络最优的权值。将数据集图像裁剪为800×800像素大小,利用卷积神经网络监督学习,软件识别效果达到设计精度要求或设计次数后停止训练。神经网络训练如图7所示。
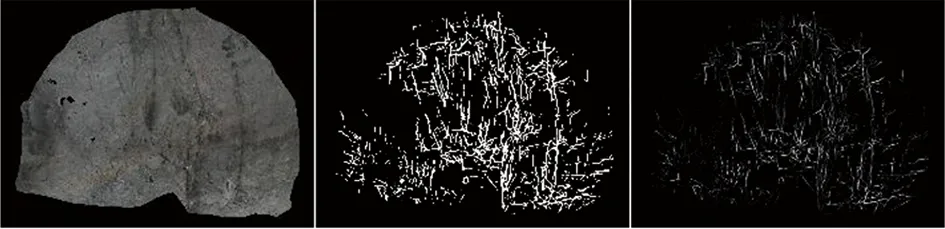
(a) 原始图像1 (b) 识别训练1 (c) 训练结果1
4)节理特征图像处理。通过神经网络模型得到的特征图像是概率分布图,需经过处理才能得到待定结构面区域,本文采用条件随机场算法(CRF)对结构面图像进行标记,算法步骤如下:
①设置随机变量Xi∈L={l1,l2,…,lL}表示像素i的标签,并根据X1,X2,…,XN组成随机向量,N表示图像的像素个数。

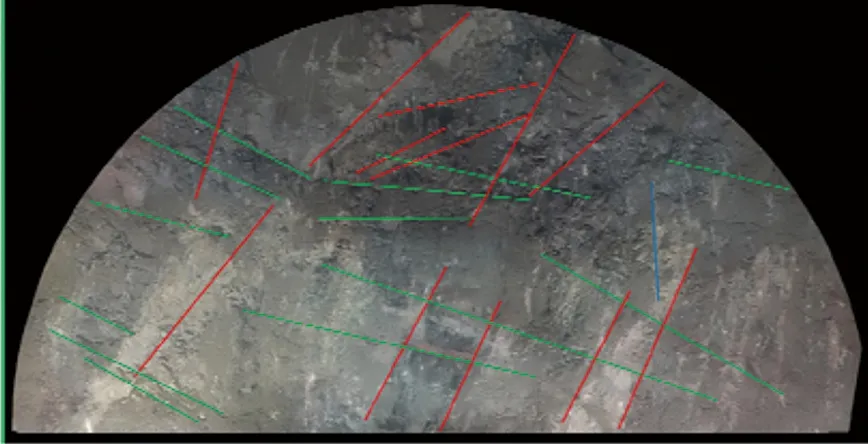
③在全连接的条件随机场模型中,将标签xi的能量表示为E(x)=∑iφu(xi)+∑i ④针对得到的E(x)进行阈值判断,保留概率大于0.5的像素点,得到掌子面结构面概率阈值,如图8所示。 图8 掌子面结构面概率阈值图 5)毛刺剔除及节理分组。首先,对阈值标签图像进行连通区域提取; 然后,对提取到的连通区域进行线条细化处理,得到单像素宽度的不规则线条; 最后,将训练获取的节理迹线与三维模型识别投影至二维平面上的结构面迹线进行重合度判断。当二维识别结构面最小闭包与三维结构面投影区域基本重合时,说明二、三维同时识别了同一结构面。利用两者角度的绝对差计算两者最小闭包矩形重合率,将闭包面积小于预设阈值的区域进行剔除。 在对节理迹线进行分组时,为解决0°与360°重合导致无法使用欧式距离进行聚类的问题,利用式(1)计算基于统一参照坐标轴的角度,然后利用式(2)将角度映射到圆周上得到位置的坐标点。 (1) 式中:θ为迹线角度;x0、y0为原点坐标;x1、y1为迹线的起点坐标;x2、y2为迹线的终点坐标。 P(x,y)=(sinθ,cosθ)。 (2) 式中P(x,y)为迹线坐标点。 将处理后的节理迹线坐标点作为集合,使用Meanshift聚类算法对其进行分类。该算法通过随机确定中心点,将距中心点带宽之内的点作为集合;计算出中心点与集合中每个元素的向量,并将向量相加得到偏移值;将中心点沿偏移向量移动其模长的距离,直至偏移向量大小满足设定的阈值,实现节理迹线坐标点聚类。聚类后的节理迹线取数量最多的前3组作为保留节理,剩余的组别作为杂乱结构面。掌子面素描结果如图9所示。 图9 掌子面素描结果 《铁路隧道设计规范》采用BQ法对围岩进行评价,该方法是基于岩石坚硬程度和岩体完整程度2个指标,其中岩体坚硬程度由围岩单轴饱和抗压强度Rc得出、岩体完整程度通过岩体完整性指数Kv得出。BQ值计算见式(3)。 BQ=90+3Rc+250Kv。 (3) 式中: BQ为围岩基本质量指标;Rc为围岩单轴饱和抗压强度;Kv为岩体完整性指数。 在进行BQ值计算时,Rc值可通过围岩强度试验直接获取,Kv值的获取则为本文的研究目标。由规范可知,Kv值与岩体体积节理数Jv值存在对应关系,而Jv值可由掌子面围岩节理识别计算得出。Jv值和Kv值一般情况下的计算见式(4)[18]。 (4) 式中Jv为岩体体积节理数。 间距法是常用的Jv值测量方法。在本文中,卷积神经网络算法提取掌子面节理迹线并分组后,通过做虚拟测线的方式可获取各组节理迹线之间的间距并求得其平均值,通过式(5)计算出Jv值。 Jv=S1+S2+…+Sn+Sk。 (5) 式中:Sn为第n组节理每m长测线上的条数;Sk为每m3岩体非成组节理条数。 由式(5)可知,其默认假定为各组节理的法向计算测线长度均为1 m,但实际岩体中节理分布不均,节理间距存在明显的离散性,而且当节理组与单位体表面斜交时,其计算测线长度大于1 m,故实际计算Jv值时,乘以1.05~1.1的修正系数[19]。 本文研究方法在池黄铁路岭上村隧道和黄坑隧道进行了现场应用。其中,黄坑隧道位于黄山市黄山区境内,为单洞双线隧道,隧道全长2 942 m,最大埋深约350 m。勘测资料显示,隧址区域构造应力复杂,造成区域内褶曲、断裂交错,隧道洞身稳定性较差,故在开挖过程中进行隧道掌子面围岩结构面特征信息提取对验证勘察资料和指导施工有着重要意义。 在黄坑隧道DK64+695~+845段共采集18组掌子面数据对掌子面围岩完整性进行分析。现以DK64+706断面掌子面为例,对掌子面围岩结构面特征获取进行描述。掌子面围岩信息使用智隧慧眼设备进行采集,在该里程处共采集图像23张。DK64+706掌子面图像如图10所示。将原始数据导入SMART EYE软件后,经过拼接、三维点云生成、连接和拟合后,获得的掌子面三维模型如图11(a)所示,裁剪后的掌子面如图11(b)所示。 图10 DK64+706掌子面图像 (a) 掌子面三维模型 (b) 裁剪后的掌子面 基于前述方法获得的DK64+706断面节理软件识别效果如图12(a)所示。该掌子面包含2组节理,组1节理的倾角主方向为49°、节理间距为0.51 m、平均长度为2.85 m; 组2节理的倾角主方向为-8°、节理间距为0.79 m、平均长度为3.26 m; 掌子面围岩Jv值为3.55、Kv值为0.73。软件识别结果与地质工程师素描结果(见图12(b))进行对比,能够识别出与之对应的节理迹线,验证了该方法在隧道使用中的可行性和准确性。 (a) 软件识别效果 在黄坑隧道获取的18组掌子面围岩节理信息如表1所示。可以看出: 开挖揭露的掌子面围岩Kv值处于0.66~0.75,岩体完整程度为完整和较完整,总体来看应用段落内围岩完整程度较好,适合隧道开挖施工。 表1 掌子面节理信息 DK64+695~+845段长150 m,共开挖46 d,施工进度反映了本文所用方法对围岩完整度识别的准确性。 从现场应用可知,相比于传统的人工获取隧道围岩节理信息的方式,采用本方法可以在不接触的条件下,灵活、快速地从掌子面模型和图像中获取围岩节理信息,避免了地质工程师暴露在掌子面开挖围岩下方的风险,保证了在围岩信息采集中的人身安全。此外,结合现场围岩回弹试验、点荷载试验或随钻监测[20]等方式获取的掌子面围岩强度信息,可进行围岩分级工作,为隧道地质信息编录和施工调整提供依据。 1)提出掌子面围岩信息快速采集方式,使用自研软件实现图像三维重构模型与激光扫描模型的匹配。利用掌子面和边墙三角面网格模型法向量与设计线路的关系,实现三维模型的切割。现场应用表明,该方法可快速建立掌子面三维实景模型,并避免了边墙对围岩结构面识别的影响,有较好的推广应用价值。 2)利用三维模型中围岩结构面法向量的差异,实现结构面三维识别。利用卷积神经网络算法实现围岩结构面的自动识别标记,结合Jv值计算式建立掌子面围岩完整度判识方法,在黄坑隧道的现场应用中验证了该方法的准确性和可行性。 3)掌子面围岩分级作为确定隧道设计参数合理性的重要参数,是当前的研究热点。本文研究的内容主要是围岩完整度判识,仅为掌子面围岩分级参数中的一部分,下一步将结合围岩强度等参数对掌子面围岩分级的自动判识进行研究。 现场应用证明: 本文提出的方法可获得掌子面精确的围岩结构面特征信息,具有良好的围岩完整度判识效果; 但在现场应用中也表现出图像模型和扫描模型结合精度不足、结构面自动识别准确率有待提高等局限,后续需注重模型结合算法和结构面识别算法的优化。

2.3 围岩Jv值计算
3 工程应用
3.1 掌子面模型构建及节理分析


3.2 掌子面岩体完整度分析

4 结论与讨论
猜你喜欢
科技和产业(2020年11期)2020-12-09
铁道科学与工程学报(2020年10期)2020-11-19
铁道建筑(2019年7期)2019-08-08
福建交通科技(2019年2期)2019-05-18
中国铁道科学(2019年1期)2019-02-18
中国煤层气(2018年3期)2018-07-27
中国工作犬业(2017年8期)2017-08-22
中国工作犬业(2016年12期)2017-01-04