
车床上下料液压机械手的设计*
2023-10-18 07:19杨丽梅李鹏祥张春兰李永宁
南方农机 2023年21期
杨丽梅 ,李鹏祥 ,张春兰 ,李永宁 ,王 博
(宁夏理工学院,宁夏 石嘴山 753000)
制造业是我国的立国之本、兴国之器、强国之基。中国是制造业大国,随着工业5.0 时代的到来,机械手作为智能机械化、自动化生产过程的一种新型装置,现已被广泛地应用于智能自动化柔性生产线中[1]。近年来,智能机器人生产和研制的快速发展,促进工业机械手朝着智能化、自动化、精细化的方向进一步发展[2]。当下机械手的种类包罗万象,虽然机械手的灵活性能与大多数人工相比低了很多,但是它可以替代人工做一些重复枯燥的机械运动。目前,我国大多数工厂里面的生产流水线工作还是由人工劳动力去完成的,其中的危险性较大,人力、物力的消耗对于工厂来说是一笔不小的开销,但是如果换成现有的老旧机械手,耗时长、生产效率低下而且成本并不低。本设计的主要目的是针对国内生产线上那些劳动强度大且具有一定危险性的岗位,满足工厂生产的需要,并提高生产的效率,节省工厂在人力、物力上的成本。车床上下料机械手整体结构的改进,能够有效提高劳动生产率,降低人力劳动的强度,改善车床上下料车间的工作环境。为此,我国高度重视机械手的研制和发展,本设计可为后续相关人员的研究提供一定的理论参考依据。
1 机械手整体方案的设计
1.1 机械手结构形式
在车床上下料中,根据给定的设计参数,在考虑到加工制造的工件合格的情况下尽量地减少成本和材料的消耗且有效地提高工作效率。只有所设计的机械手结构简单紧凑才能有效地达到上述目标,因此在这次设计中最大程度上简化机械手的结构使其方便操作和使用,为工厂的使用提供了最大的便捷。由于机械手需要实现上下料和取料的动作,主要考虑在X轴和Y轴运动以及绕Z轴的旋转运动。故选用圆柱坐标形式的结构,设计实现上下料功能的机械手[3]。机械手结构形式如图1所示。
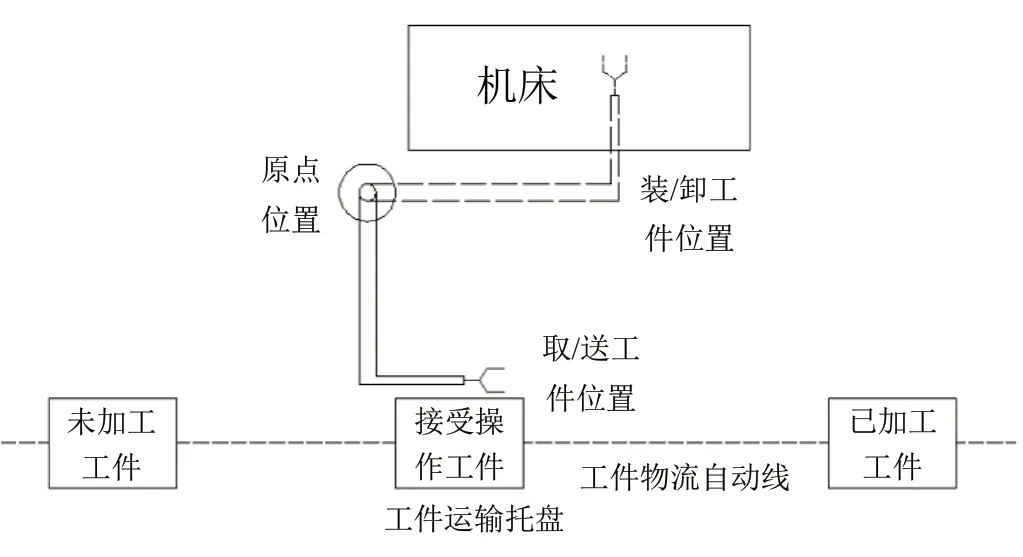
图1 机械手结构形式
1.2 机械手腰座结构设计
驱使机械手腰座回转的方式主要有以下两种:1)电机通过减速器机构来控制腰座的回转;2)电机通过摆动液压缸或液压马达机构来控制腰座的回转。综合目前国内机械手的整体情况可以看出,大部分的机械手都采用电机通过减速器机构来控制腰座的回转。本次设计的机械手的控制系统基于PLC 进行控制,为了使机械手在运动的过程中各个机构之间不会产生干涉现象,因此在设计的过程中不用选择过多的液压元件。腰座是上下料机械手的重要回转关节,对机械手控制的精度产生极大的影响,精确地控制机械手腰部的回转运动非常重要[4]。如果直接采用电机带动减速器来控制机械手腰座的转速和扭矩,在满足转速和扭矩的要求下,齿轮传动的传动比较大,若采用多级齿轮传动,且齿轮传动的过程中存在齿侧间隙,会导致齿轮传动的机械效率较低,因此不宜采用多级齿轮传动。若采用大于100 传动比的单级齿轮传动,可避免将机械手的结构设计得复杂,同时,齿轮的材料应选择高强度、高硬度、高精度的铸钢[5],并且采用高精度的加工制造工艺,提高加工制造齿轮的精度,从而减小齿轮传动产生的误差来满足机械手腰座的运动性能要求。机械手腰座结构如图2所示。

图2 机械手腰座结构
1.3 机械手手臂的结构设计
考虑实际工况环境,机械手主要实现上下料功能,运动形式大多数为直线运动。为了方便控制机械手的直线运动,通常采用的控制方式有电动控制、液压传动控制、气压传动控制、复合传动控制等方法。由于在设计的过程中机械手搬运的物料质量较轻,为了能精准地控制机械手的运动,运动速度控制为中低速[6]。在满足性能和成本的基础上,采用液压控制系统。在机械手手臂工作的过程中由液压系统来控制机械手的上下左右动作,通过液压缸来实现机械手的移动和控制。依据机械手结构的标准范围,为了设计的结构紧凑,在设计的过程中额外加入了导杆机构,并且在小臂上加入了一个导杆来提高其刚度,在大臂处增设了四个导杆,四个导杆呈正四边形布置,为了减轻机械手手臂的重量,所有导杆均采用空心结构。这样设计的机械手臂机构紧凑、质量轻、控制精度高、稳定性好。
1.4 机械手腕部的结构设计
当机械手进行上下料的作业时,考虑到车床加工的具体形式和具体要求,在满足工艺要求的前提下需要提高机械手工作时的安全性和可靠性。为了降低控制机械手的难度,将机械手的结构设计得简单紧凑一点,因此在设计的过程中采用三个自由度实现机械手的上下运动以及回转运动[7]。机械手腕部结构如图3所示。

图3 机械手腕部结构
1.5 机械手手爪的结构设计
在机械手的设计中,主要使用了齿轮齿条的结构形式,用手爪后部的液压缸来驱动活塞的移动以带动手爪的张开和闭合,其中,手爪的抓取直径可以随意调节,可以满足抓取工件的尺寸要求[8]。机械手手爪结构形式如图4 所示。
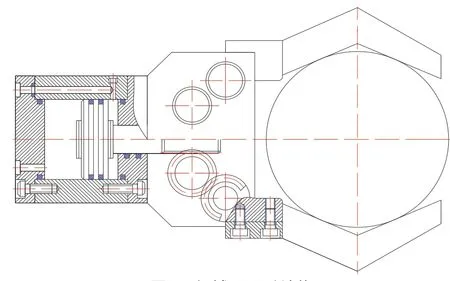
图4 机械手手爪结构
2 机械手液压系统的设计
机械手液压系统由三相异步电动机来提供动力,然后控制机械手臂的移动和换向,在液压系统中选用溢流阀V1 对整个液压系统起安全保护作用,其通断由PLC 控制的二位二通电磁换向阀1DT 的得电与失电进行控制[9]。整个液压系统中还包含机械手手爪的液压系统设计,其中手爪的抓紧和放松由5DT和6DT 来控制,同时这两个元件结合单向阀及节流阀,控制机械手抓紧和放松的速度。为了保证机械手的升降能够有序平稳运行,本次设计采用了2DT和3DT 控制的平衡回路为升降液压缸的下腔提供背油,来确保升降的平稳性[10]。机械手液压系统如图5所示。
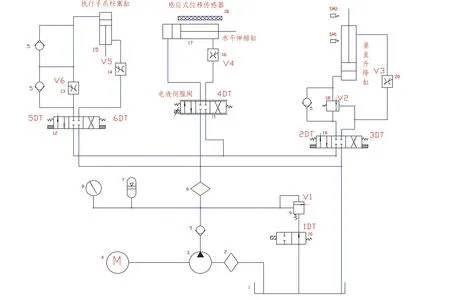
图5 机械手液压系统图
3 总结
本文通过对上下料液压机械手进行整体机构的设计,特别是对机械手的结构形式、腰座、手臂、手爪、腕部等结构进行具体的选型。机械手的控制部分采用液压控制系统,并且通过PLC 对液压系统的电磁得失电和电机的转动进行控制,有效提高了机械手的工作效率。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
机械设计与制造工程(2022年1期)2022-02-19
模具制造(2019年10期)2020-01-06
电子制作(2018年24期)2019-01-03
华北理工大学学报(自然科学版)(2017年4期)2017-11-29
荣誉杂志(2017年7期)2017-08-23
通信电源技术(2016年1期)2016-04-16
机电信息(2015年3期)2015-02-27
机械工程师(2014年12期)2014-12-23
河南科技(2014年11期)2014-02-27
