
基于LoRa 的山地果园轨道运输机远程控制系统设计*
2023-10-18 07:19邱逸凡林仕聪柯文韬王家博肖茂华周路双
南方农机 2023年21期
邱逸凡 , 林仕聪 , 柯文韬 , 王家博,2 , 肖茂华 , 周路双
(1.南京农业大学,江苏 南京 210031;2.江苏农林职业技术学院,江苏 镇江 212400;3.金湖双洋机械有限公司,江苏 淮安 211600)
山地果园坡度较陡,山路曲折迂回,果树栽植密集,运载果品时操作人员与轨道运输机距离较远,再加上彼此间有果树遮挡,因此要求较远的通信距离和较高的远程控制系统的稳定性[1]。针对山地果园运输中恶劣的作业环境和较差的舒适性,设计了一套用于轨道运输机的远程控制系统,供轨道运输机运送果品使用。LoRa 技术是一种低功耗、远距离数据传输技术,目前LoRa 技术最大覆盖直径可以达到10 km,具有超低的延迟,可以满足大多数对数据传输延迟要求较高的使用场景[2]。课题组基于LoRa 技术设计了一种应用于山地果园轨道运输机的远程控制系统,应用该系统后能够在5 km 的直径范围内远程控制以汽油发动机为动力的山地果园轨道运输机。该系统具有功耗低、传输距离远、成本低且稳定性好等特点[3],可提升丘陵山地农业生产效率,推进山地农业向机械化、智能化方向快速转型[4]。
1 系统整体概述
课题组设计的山地果园轨道运输机远程控制系统以装有推杆、汽油机为动力的山地果园轨道运输机为主要应用对象。遥控器部分由STC89C51 单片机、键盘模块、LCD1602 模块、干电池和Lora 无线通信模块组成[5]。在键盘端可输入前进、后退、停止3 种指令,STC89C51 单片机接收到指令信号后,在LCD1602 模块上将指令显示出来,并通过LoRa 无线通信模块将指令向山地果园轨道运输机发出,干电池作为遥控器的电源。山地果园轨道运输机上的LoRa无线通信模块接收到遥控器发送的信号后传输到STC89C51 单片机中,此时STC89C51 单片机将指令转换为电平信号传输给L298N 电机驱动模块,该模块控制电动推杆,将山地果园轨道运输机的控制推杆运行到指定的位置,来达到物理控制山地果园轨道运输机的效果,以此来控制轨道运输机的启动、停止及运动方向。干电池给STC89C51单片机供电,24 V 锂电池通过L298N 电机驱动模块给电动推杆供电。系统整体设计如图1所示。
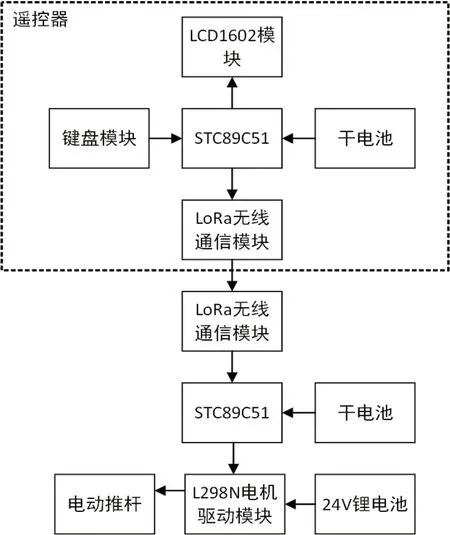
图1 系统整体设计图
2 系统设计
2.1 系统硬件设计
本次设计采用4 位独立键盘作为指令输入端,使用STC89C51 芯片接收输入的指令并进行处理,外接LCD1602 显示屏显示单片机接收到的指令信息,遥控器端AS32-TTL-1W 模块接收数据并通过广播的方式发送出去,在接收端山地果园轨道运输机上使用相同配置(波特率、空中速度、模块地址、通信信道)的AS32-TTL-1W 模块进行数据的接收,从而达到远距离低功耗传输,指令通过另一STC89C51 芯片处理后转换为电平信号传输给L298N 电机驱动模块,最后电动推杆推动离合摇杆和换挡摇杆实现轨道运输机的控制。
2.1.1 LoRa模块
LoRa 模块选用的是AS32-TTL-1W 型号,此型号的LoRa模块是一款433 MHz、1 W、具有高稳定性的无线传输模块,根据SX1278 射频芯片设计开发[6]。该模块采用高效的循环纠错算法,具有编码效率高、纠错能力强的特点,提高了稳定性和抗干扰性。接收灵敏度达-130 dBm,传输距离达10 000 m,休眠电流低至1.5 μA,频率410 MHz~441 MHz,有32 个信道可选,默认工作在433 MHz,无需申请即可使用,满足设计要求。
AS32-TTL-1W 模块具有4 种工作状态,可在运行时通过引脚的输入切换状态。本次设计使用省电工作状态和唤醒工作状态,在这两种状态下,消耗电流极低,极低的功耗满足使用要求。4 种工作状态如下。
1)一般工作状态:串口和无线打开。
2)省电工作状态:串口接收关闭,无线处于空中唤醒模式,接收到无线数据后打开串口发送数据。
3)唤醒工作状态:串口和无线打开,与一般工作状态不同之处在于,此状态下,数据包在发送之前会自动添加唤醒码,唤醒省电工作状态下的接收方。
4)休眠工作状态:无线进入休眠状态,只可通过接收命令进行参数配置。
LoRa 模块引脚定义:MD0、MD1 作为输入互相配合,0 和1 决定模块的4 种工作模式。RXD 作为TTL 串口输入,连接到外部TXD 输出引脚,可配置为漏极开路或上拉输入。TXD 作为TTL 串口输出,连接到外部的RXD 输入引脚,可配置为漏极开路或推免输出。AUX 作为用于指示模块工作状态的用户,唤醒外部的MCU 上电自检初始化期间输出低电平,可配置为漏极开路输出或推免输出,VCC 电源输入端,GND接地[4]。模块引脚连接如图2所示。
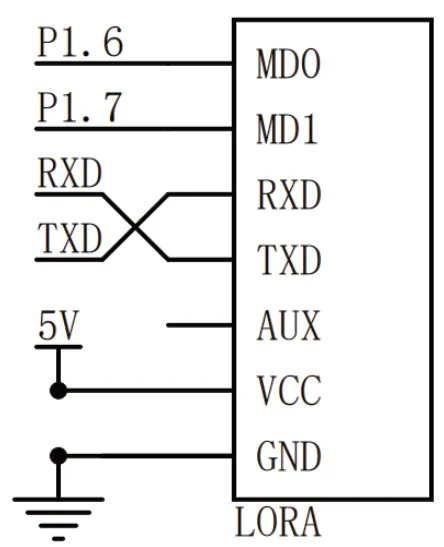
图2 LoRa 模块引脚连接图
2.1.2 4位独立键盘
在山地果园轨道运输机的远程控制系统设计中,本次设计采用了4 位独立键盘作为输入设备,用于实现用户与STC89C51 单片机之间的交互操作。4 位独立键盘是一种常见的数字输入装置,由4 个独立按键或按钮组成,每个按键分别代表一个数字或功能,可实现用户对系统的输入和控制。4 个按键都与单片机的I/O 口相连,使用其中3 个,通过I/O 口来读取按键的输入状态。用户可以通过键盘按键S4、S3、S2 输入前进、后退、停止3 种指令,独立键盘引脚图及实物图如图3 所示。这种设计为山地果园轨道运输机的远程控制系统提供了简单、直观且有效的输入方式,增强了系统的友好性和可操作性。
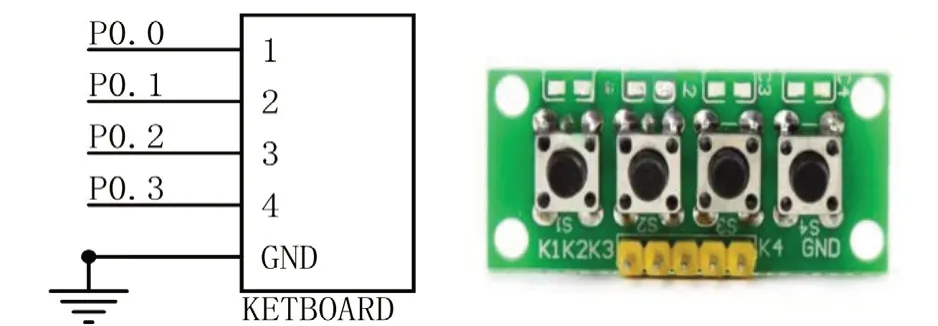
图3 独立键盘引脚图及实物图
2.1.3 LCD显示模块
本次设计采用LCD1602A 字符型液晶显示模块,其中1602 代表每行显示16 个字符,共有2 行显示,专门用于显示字母、数字元、符号等的点阵型液晶显示模块[7]。LCD1602A 具有功耗低、抗干扰能力强、体积小、价廉等优点,使其成为山地果园轨道运输机的远程控制系统设计中的理想选择。LCD1602A 模块的引脚包括:
1)VSS:接地,用于提供LCD模块的电源地线。
2)VCC:接5 V 电源,用于供给LCD模块的工作电压。
3)VO:接滑动变阻器,可通过调节电压大小来调节LCD亮度,实现背光的控制。
4)RS:为寄存器选择,用于区分数据和命令的输入。高电平状态和低电平状态分别选择数据寄存器和指令寄存器。
5)RW:为对单片机的读写指令,用于控制LCD的读写操作。高电平时进行读操作,低电平时进行写操作[8]。
6)E:为显示屏的输入使能端,用于启动LCD显示。
7)D0 到D7:为8 位总线结构,用于双向传输数据和命令。
8)BLK 和BLA:分别接背光电源的正负极,用于控制LCD的背光亮度。
2.1.4 电机驱动模块
在山地果园轨道运输机的STC89C51 单片机上连接L298N 逻辑的7 A/160 W 双路直流电机驱动模块,单片机将指令处理后转换为电信号,通过此模块达到控制电动推杆的目的。7 A/160 W双路直流电机驱动模块是双H 桥结构,可同时驱动两台直流电机,每一路拥有7 A 大功率;宽电压6.5 V~27 V;光耦隔离输入信号[9];可I/O 口直接控制,不受干扰;带隔离和欠压保护;符合电磁兼容EMC 设计规范,有静电泄放回路,稳定可靠。
2.2 软件系统设计
2.2.1 控制流程设计
本次山地果园轨道运输机的远程控制系统设计使用keil5 软件进行程序的编写,控制系统流程图如图4所示。

图4 控制系统流程图
2.2.2 设计程序实现
程序编写主要分为两个部分,一个作为指令信息发送端的遥控器部分,主要是键盘输入和LCD 显示屏显示以及LoRa 模块进行数据发送;另一个在山地果园轨道运输机上作为指令信息的接收端,主要是LoRa 模块对数据的接收和电机驱动模块驱动电动推杆的运行。具体程序如表1~3所示。

表1 STC89C51单片机主函数代码
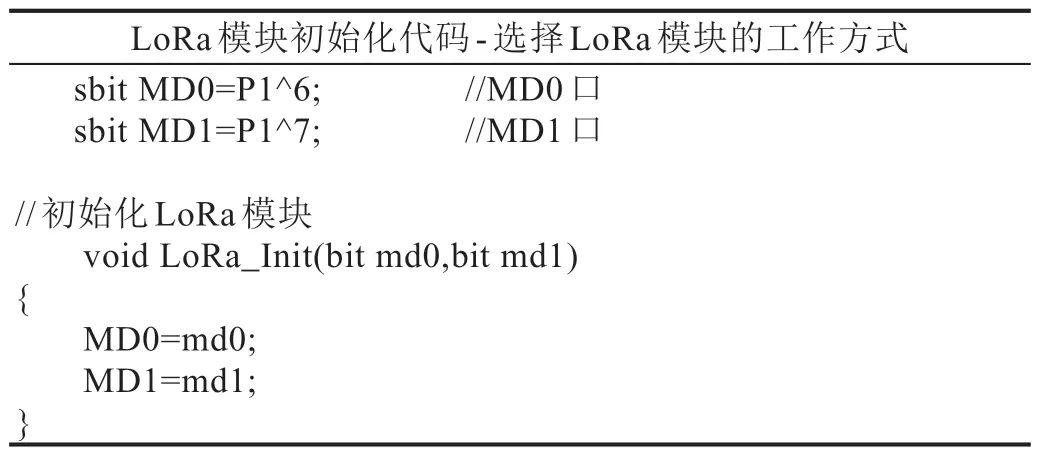
表2 LoRa模块初始化代码
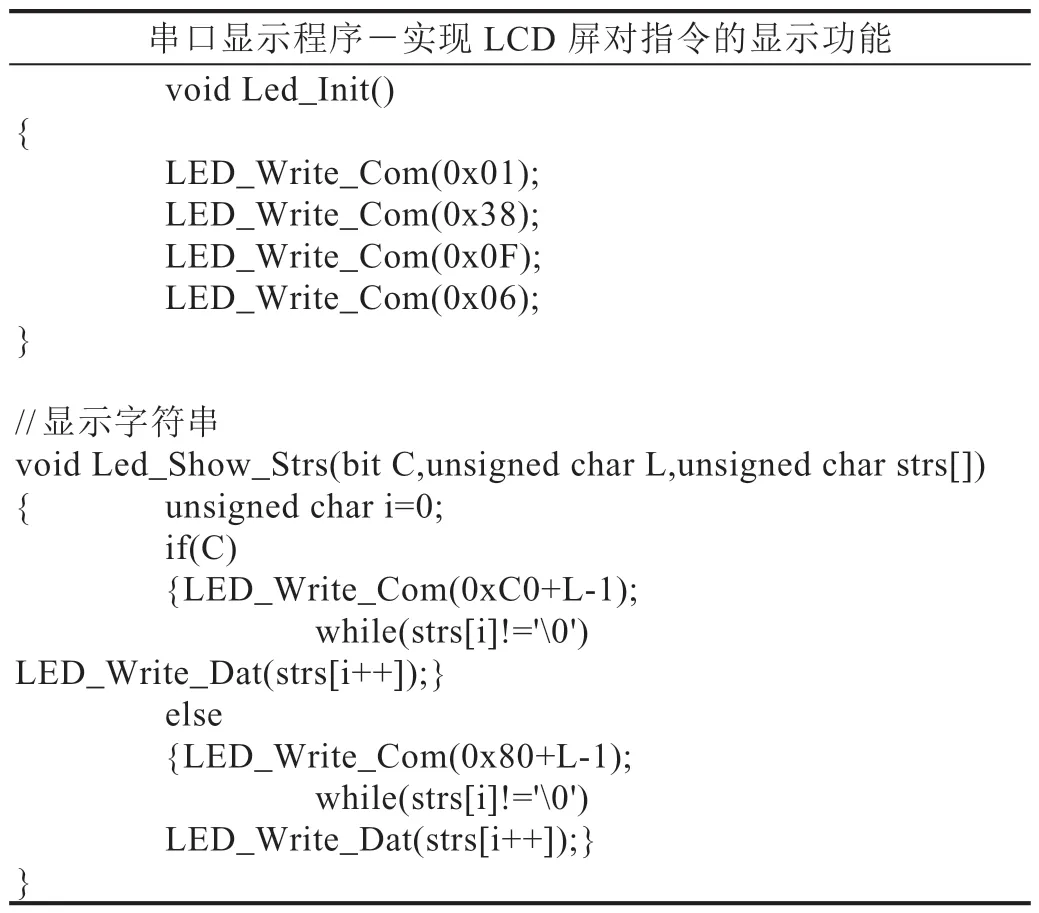
表3 串口显示程序
3 系统调试
系统整体测试地点在金湖双洋机械有限公司场地,通过遥控器对山地果园轨道运输机前进、后退、停止3 种指令在有无装载货物的情况下进行多次试验,得出运输机在遥控器操控下,能够实现任一点换挡,任一点瞬间制动,频繁换向及极限位置自动停止功能,满足控制系统所需[10]。运输机整体测试主要包括以下几个方面:
1)控制距离与延迟测试。控制距离与延迟时间结果如表4 所示。

表4 控制距离与延迟时间
此次试验选取了3 个各自相差大于70°的方向,分别与轨道运输机相距0.5 km、2 km 和5 km 的距离,在遥控器端输入指令,通过软件测试出轨道运输机端LoRa 模块接收到指令的延迟时间,满足远程精确控制的要求。
2)指令准确性测试。在控制距离与延迟时间测试中,在各方向不同距离装载货物和空载情况下各测试10 次换挡指令。试验结果表明轨道山地果园运输机能够根据输入的指令进行换挡操作,传输数据误码率几乎为0。
3)功耗性测试。AS32-TTL-1W 型号的LoRa 模块工作在收发模式下最大功耗在1 W 左右,接收灵敏度高达-130 dBm,休眠电流低至1.5 μA,功耗低,续航久。
4 结论
课题组基于AS32-TTL-1W 型号的LoRa 模块设计了山地果园轨道运输机控制系统,充分利用 LoRa模块的传输距离远的特性,在山地丘陵等地形陡峭崎岖的果园生产中远距离控制轨道运输机。本设计主要特色体现在:1)远距离的传输,其覆盖直径可以达到5 km;2)极短的延迟时间,数据平均传输时间在2 ms 以内,可以实现精确控制;3)功耗低,续航时间久,最大功耗在1 W 左右,休眠电流低至1.5 μA,能够长时间使用。另外本设计的控制系统对于以柴油机为动力和电动机驱动的轨道运输机同样适用,在其他的远程控制领域也能得到应用,为人们的生活提供了便利,在农业机械化、智慧农业、无人农场等领域有广阔的应用前景。
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30
青海草业(2022年2期)2022-07-23
军事文摘(2020年15期)2020-08-15
小哥白尼(军事科学)(2019年5期)2019-08-27
测控技术(2018年5期)2018-12-09
经济技术协作信息(2018年28期)2018-11-22
电子测试(2018年18期)2018-11-14
乡村地理(2018年3期)2018-11-06
小学生学习指导(小军迷联盟)(2018年10期)2018-10-12
乡村地理(2018年4期)2018-03-23
