永磁同步电机自适应逆变器非线性补偿
2023-10-15 01:38:26丁一平
微特电机 2023年9期
甘 辉,孙 乐,丁一平
(南京理工大学 自动化学院,南京 210094)
0 引 言
永磁同步电机(以下简称PMSM)在功率密度、效率、可靠性等方面具有明显的优势,在新能源汽车驱动、机械臂控制等各行业应用广泛[1-2]。PMSM驱动系统主要采用电压源型逆变器,其调制技术主要采用空间矢量脉宽调制。在实际应用中,为了防止逆变器桥臂直通,在开关切换时需要加入长度大于开关切换时间的延时,即为死区时间[3]。逆变器非线性因素包括死区时间和绝缘栅双极性晶体管的开通/关断延时、管压降、寄生电容等,会导致逆变器的输出电压产生误差,引起电机三相电流畸变,造成转矩脉动,影响电机控制系统的稳定运行。因此,为了提高电机系统的稳定性和控制性能,必须对其驱动系统中的逆变器非线性进行补偿[4]。
为此,国内外学者已开展了大量研究,并提出了多种补偿方法。文献[5]应用跟踪微分器构建带有相位补偿的电流滤波器,能够准确判断出相电流极性,并在此基础上进行电压前馈补偿,但是该补偿方法未考虑逆变器非线性参数不确定性对补偿效果的影响。文献[6]根据电压空间矢量合成的方法等效改进了传统时间补偿法,并通过调整系数k来对处理逆变器非线性参数不确定的问题,但是需要进行大量实验来找到合适的调整系数。文献[7]通过实验测量拟合补偿值进行逆变器非线性补偿,补偿效果良好,但是需要精确的逆变器非线性模型。文献[8]设计了一种基于扰动观测器的在线自适应补偿算法,在两相旋转坐标系下对误差电压进行估计并补偿,但未经过实验验证。文献[9]将理想输出矢量和死区矢量进行矢量合成,并进行建表查询,列出相应补偿公式进行死区补偿。文献[10]使用迭代学习和文献[11]使用人工神经网络进行逆变器非线性补偿,其补偿效果不受模型参数影响,但是算法复杂,计算量大,难以在工程中实现。
本文在电压前馈补偿的基础上,提出了一种基于α,β轴电流误差的自适应逆变器非线性补偿策略。它利用逆变器非线性参数不确定性导致的电机相电流畸变,使用α轴、β轴的电流误差作为PI自适应控制的输入,PI控制器的输出作为修正量叠加到电压前馈补偿输出的α,β轴指令电压中,实时修正由于逆变器非线性参数不确定性导致的补偿误差。该策略无需电机和逆变器的精确参数,能有效地改善电机三相电流的畸变,减小电机的转矩脉动,且算法简洁、计算量小,便于工程实践。
1 逆变器非线性原理分析
图1为三相电压型桥式逆变电路驱动的PMSM系统拓扑图,其调制策略一般采用SVPWM。为了避免桥臂直通短路,通常在理想的驱动信号中插入死区时间Td,在Td内,同一桥臂的两个开关管均关断,二极管导通续流,此过程中产生的管压降为Vd,开关管导通时产生的管压降为Vs。除此之外,开关管的开通和关断过程中有开通延时Ton和关断延时Toff。
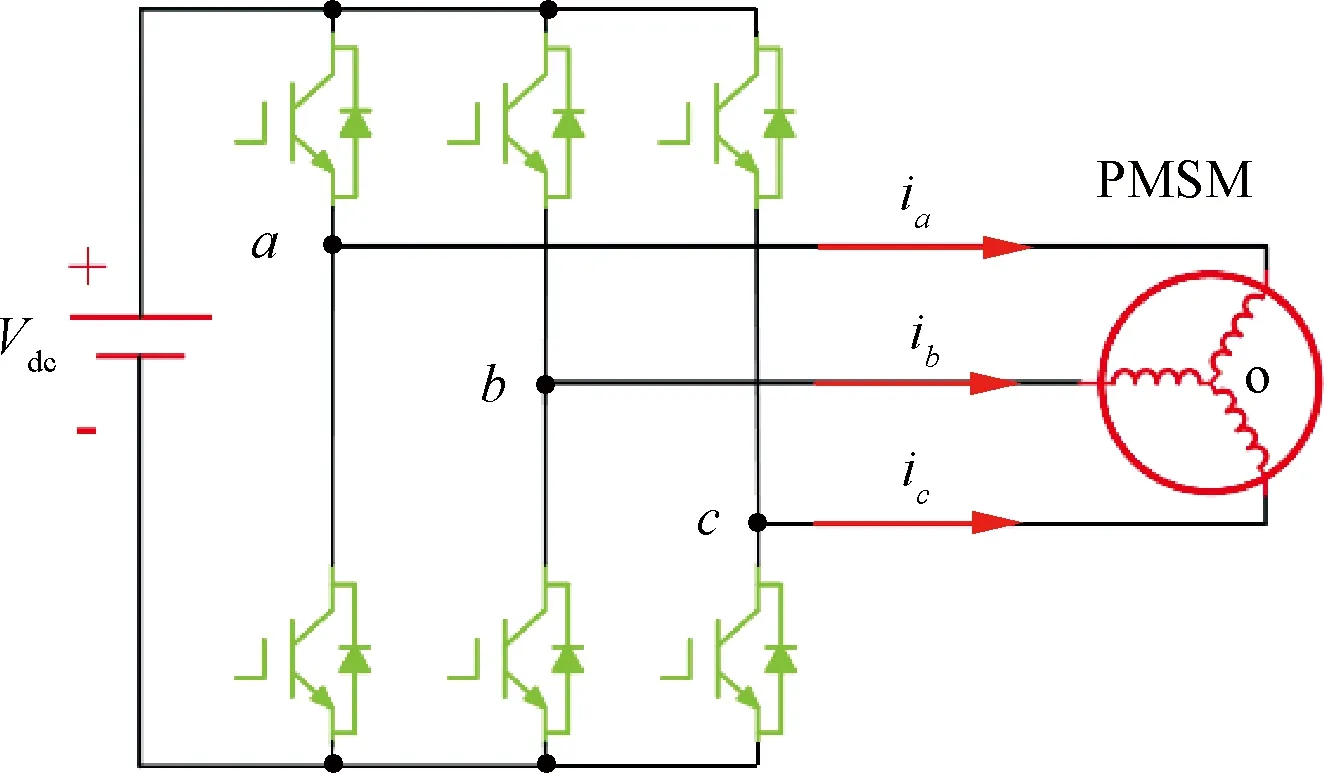
图1 桥式逆变电路-PMSM驱动系统拓扑图
下面对由逆变器非线性引起的误差电压进行详细分析。以A相为例进行分析,定义电流正方向为流入电机的方向,电流负方向为流出电机的方向,如图2所示。
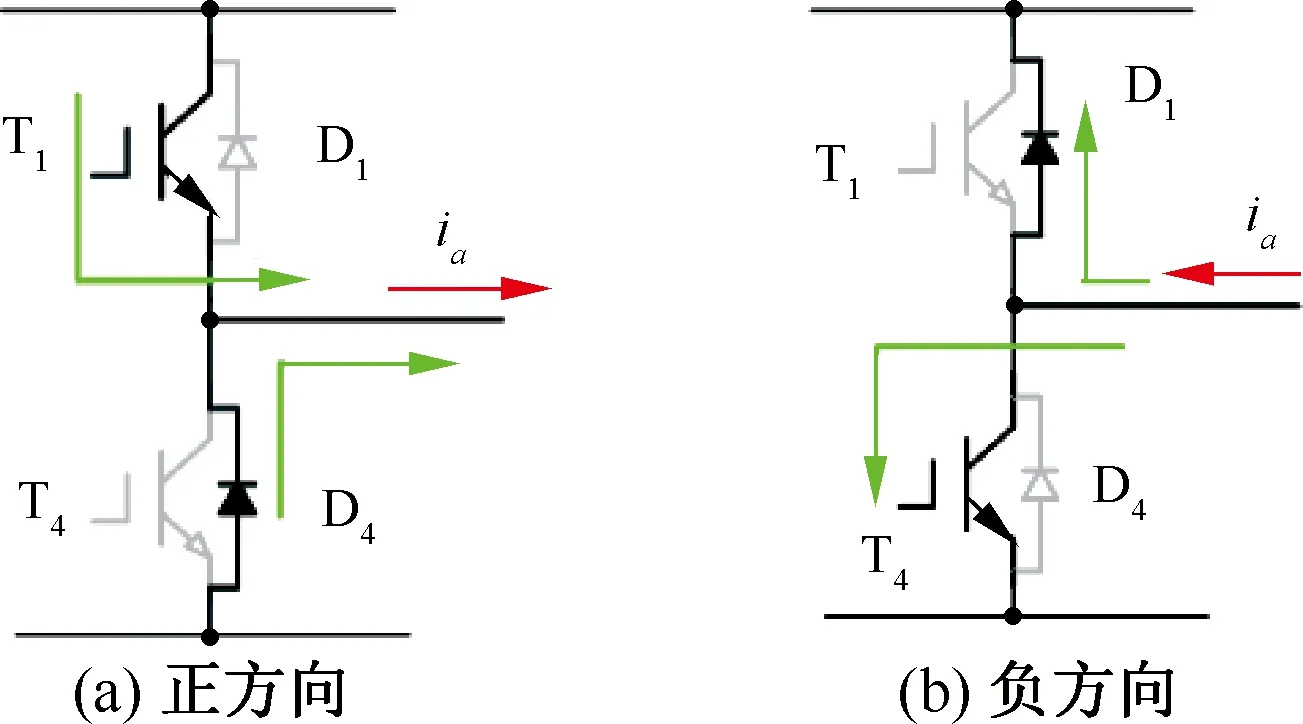
图2 A相桥臂电流方向
图3为驱动信号、开关管的状态以及A相输出电压。
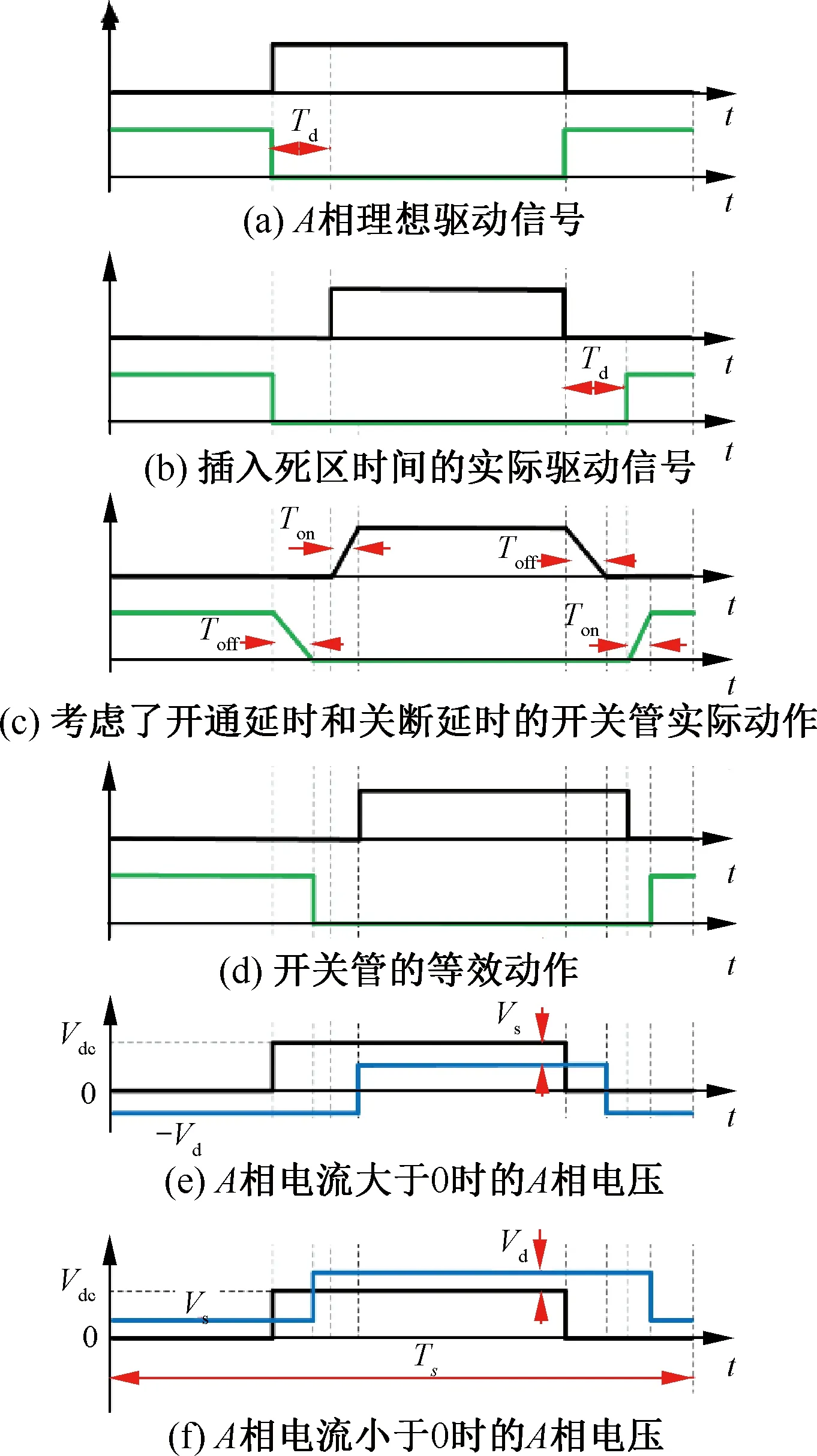
图3 A相开关信号和输出电压
当A相电流ia>0时,在一个开关周期Ts内,上管T1关断时,电流通过二极管D4续流,此时逆变器的输出电压为-Vd;在Td和Ton内,理想情况下上管T1导通,电流流经T1,输出电压为Vdc,实际是上管T1保持关断,电流继续通过二极管D4续流,此时逆变器的输出电压为-(Vdc+Vd);当上管T1开通时,电流流经T1,此时逆变器的输出电压为Vdc-Vs;在Toff内,理想情况下上管T1关断,实际是上开关管T1继续导通,输出电压继续保持为Vdc-Vs。
逆变器输出的理想电压:
V=DVdc
(1)
式中:D代表理想驱动信号的输出占空比;Vdc为母线电压。
在一个Ts内,由伏秒平衡等效原理得:
Va_errTs=-(Td+Ton-Toff)(Vdc+Vd-Vs)-
(1-D)TsVd-DTsVs
(2)
故A相的误差电压:

(1-D)Vd-DVs
(3)
当A相电流小于0时,分析类似,得ia<0时的误差电压:
(1-D)Vs+DVd
(4)
令:
(5)
(6)
可得A相的误差电压:
Ua_err=-sgn(ia)(ΔV+Va)
(7)
B、C相误差电压的推导和A相类似,故三相误差电压可表示:
(8)
2 逆变器非线性补偿策略
2.1 电压前馈补偿

图4 基于电压前馈补偿的PMSM矢量控制框图
通过坐标变换得到两相静止坐标系下的补偿电压:
(9)
将式(8)代入式(9)可得:
(10)
定子三相电流的方向直接关系到补偿电压的计算,影响电压前馈补偿的效果,故需要对三相电流的方向进行准确的判断。
2.2 电流方向判断
逆变器非线性效应引起的电机相电流畸变和电流的采样噪声等会影响电流极性的判断,影响补偿效果。在采用SVPWM作为调制策略的PMSM伺服驱动系统中,电流极性和定子电流矢量角存在对应关系,可以从电流矢量的角度来判断电流极性,下面对这种对应关系进行详细分析。
三相电流ia,ib,ic合成电流矢量is,以图5(a)为例,三相电流的方向分别为正、负、负(+--),分析这种电流方向组合下电流矢量角的极限情况:如图5(b)所示,ia= -ic>0,ib=0,此种情况下,is的电流矢量角为30°;如图5(c)所示,ia= -ib> 0,ic= 0,此种情况下,is的电流矢量角为-30°,则电流方向为+--的情况下,电流矢量角的范围是-30°~30°。其他各种电流方向的情况和此种类似,故得到三相电流方向和电流矢量角的关系如图5(d)所示。
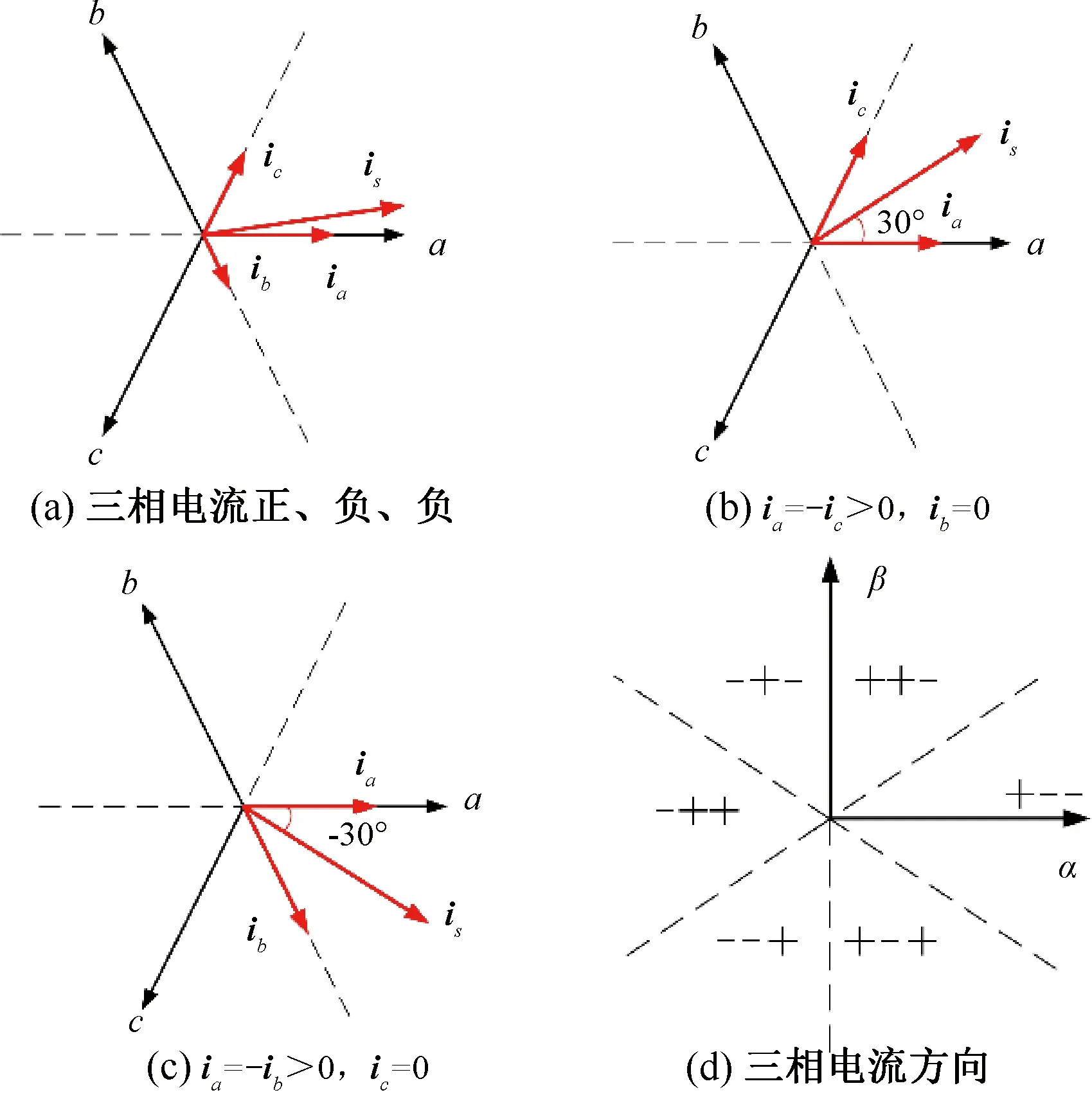
图5 电流矢量与三相电流方向关系图
定子电流矢量如图6所示,定子电流矢量与d轴之间的夹角为Φ,ψ为转子位置角,在PMSM伺服系统中,通常采用id= 0控制,此时Φ= 90°,故定子电流角θ=ψ+90°。
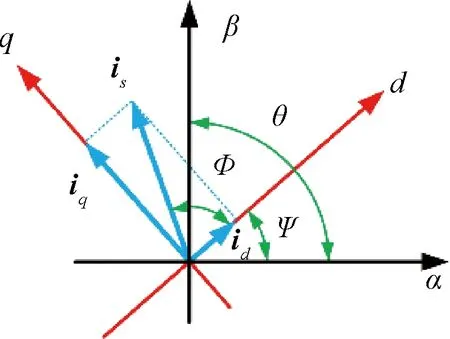
图6 定子电流矢量
结合电流矢量角和三相电流方向的关系以及式(10),可得静止坐标系下的补偿电压,如表1所示。
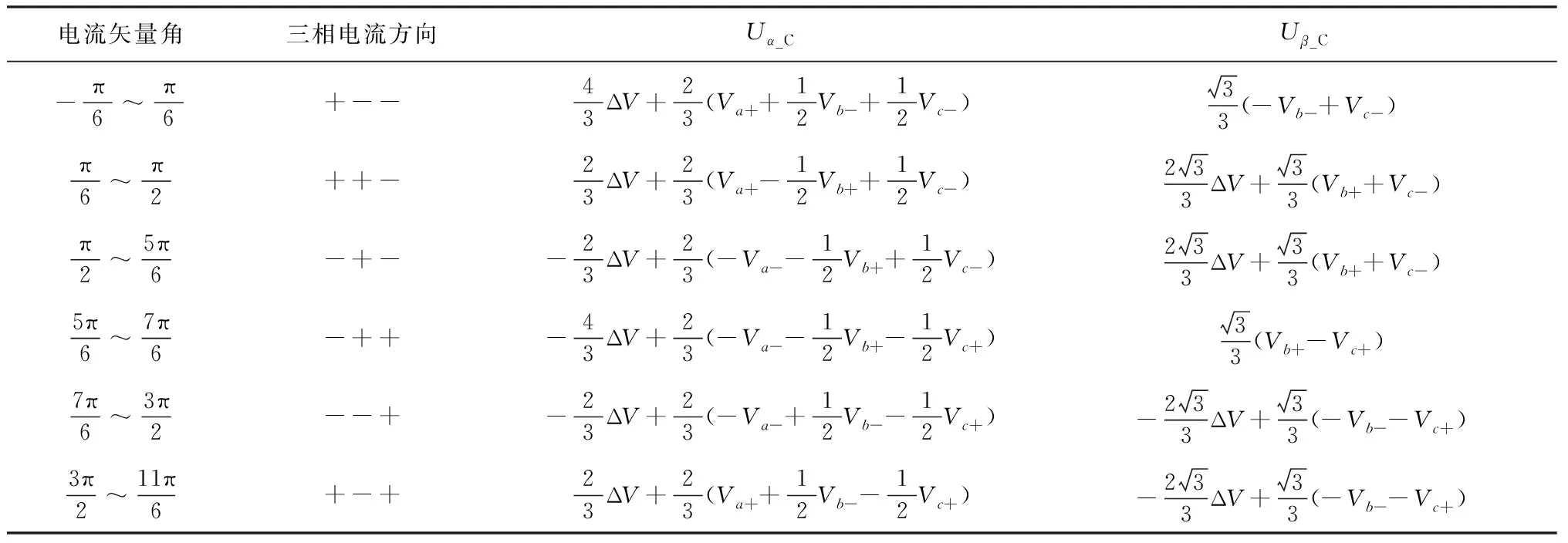
表1 电流矢量角和补偿电压关系表
根据表1的补偿电压,在每个电流矢量角扇区分别加入对应的前馈补偿电压,并将补偿后的电压输出作为SVPWM的参考电压,即可完成电压前馈补偿。完成电压前馈补偿后的α,β轴指令电压:
现场应用过程中水处理药剂的质量浓度为50 mg/L,加药点位于CDFU出口端。取加药前后出水水样,分别在室温及80℃加热3 h后观察水质情况,如图10所示。
(11)
图7为电压前馈逆变器非线性补偿的拓扑图。图7中,Da,Db,Dc分别为逆变器三个上桥臂的理想占空比。
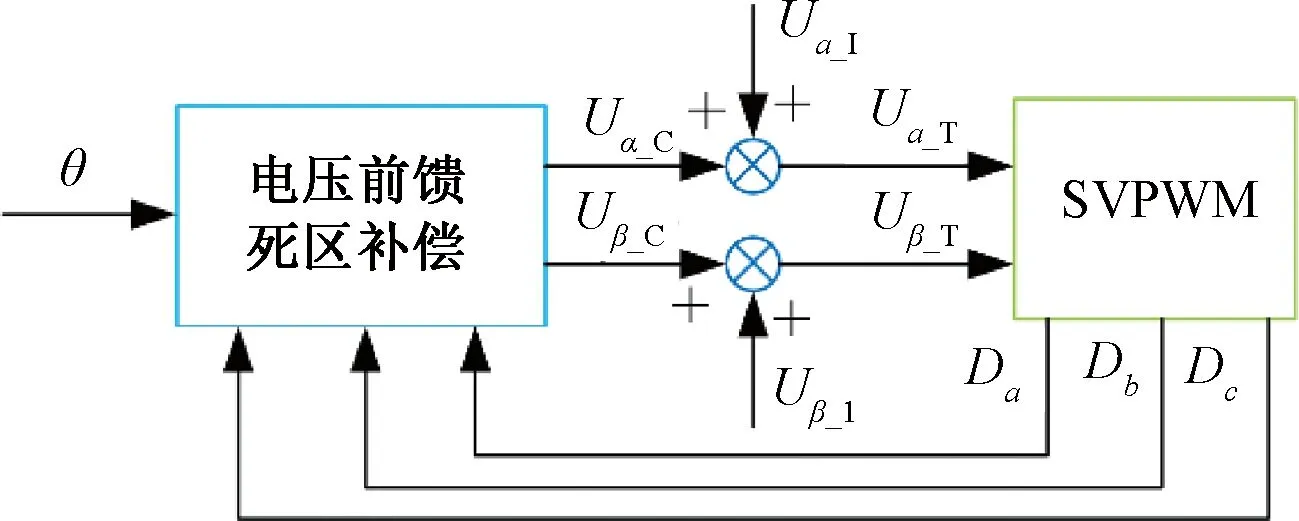
图7 电压前馈逆变器非线性补偿
3 自适应非线性补偿
由式(3)和式(4)可知,只要获得Vdc,Vd,Vs,D,Ts,Ton,Toff的准确值就可以精确地计算误差电压,进行准确的逆变器非线性补偿。而在实际系统中Vdc可通过电压采样准确获得,Ts,D和Td可以从控制系统中直接获得,而Vs,Vd的大小随流过电流、环境温度等因素的改变而变化,Ton,Toff的值变化复杂,不易得到[13],故这些参数具有不确定性。而根据式(11)进行的逆变器非线性补偿将Vd,Vs,Ts,Ton,Toff作为定值,忽略了其参数的不确定性,导致补偿不充分。针对该问题,本文提出基于α轴和β轴电流误差的自适应逆变器非线性补偿算法,具体分析如下。
表贴式PMSM基于α,β轴的电压方程:
(12)
式中:Rs为定子电阻;Ls为定子电感;p为微分算子;ψf为永磁体磁链;ωe为电角速度;θe为电角度。
经过式(11)的电压前馈补偿,受逆变器非线性参数不确定的影响,α,β轴电压的实际值和期望值之间会产生误差,由式(12)可知,该误差会体现在α,β轴电流分量上。
α,β轴的参考电压方程:
(13)
将式(12)和式(13)作差可得表贴式PMSM静止坐标系下的电压误差方程:
(14)
由式(14)可知,α,β轴电压误差和α,β轴电流误差成比例积分关系,可以用α,β轴电流误差为输入,α,β轴电压误差为输出,设计PI控制器,得:
(15)
将α,β轴上的电压误差Uα_err和Uβ_err分别叠加到Uα_T、Uβ_T上,可得自适应逆变器非线性补偿:
(16)
根据式(15)、式(16),得自适应逆变器非线性补偿,如图8所示。利用α轴、β轴电流误差实时计算α轴、β轴电压误差,然后将电压误差作为修正量补偿到电压前馈补偿中,得到自适应补偿后的α轴、β轴电压。

图8 自适应逆变器非线性补偿
4 仿真验证
结合图4、图7和图8,搭建PMSM自适应逆变器非线性补偿算法的仿真模型。仿真电机参数如下:定子电阻0.13 Ω,定子电感2.17 mH,极对数3,磁链0.008 Wb,转动惯量0.000 105 kg·cm2,给定负载转矩0.1 N·m;逆变器参数如下:电源电压80 V,续流二极管导通压降设定为1.1 V,开关管导通管压降设定为0.9 V,导通延迟时间设定为1.0 μs,关断延迟时间设定为1.1 μs,死区时间设定为4 μs,SVPWM载波频率10 kHz,仿真波形如图9~图11所示。
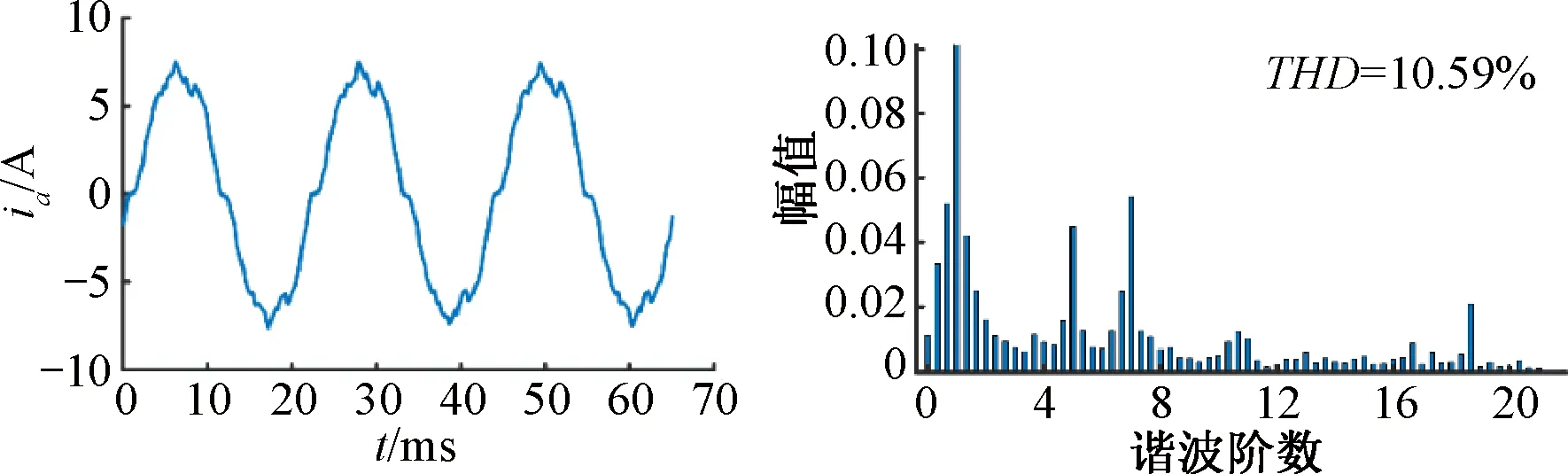
图9 未加补偿A相电流仿真波形及其THD值

图10 加入电压前馈补偿时A相电流仿真波形及其THD值
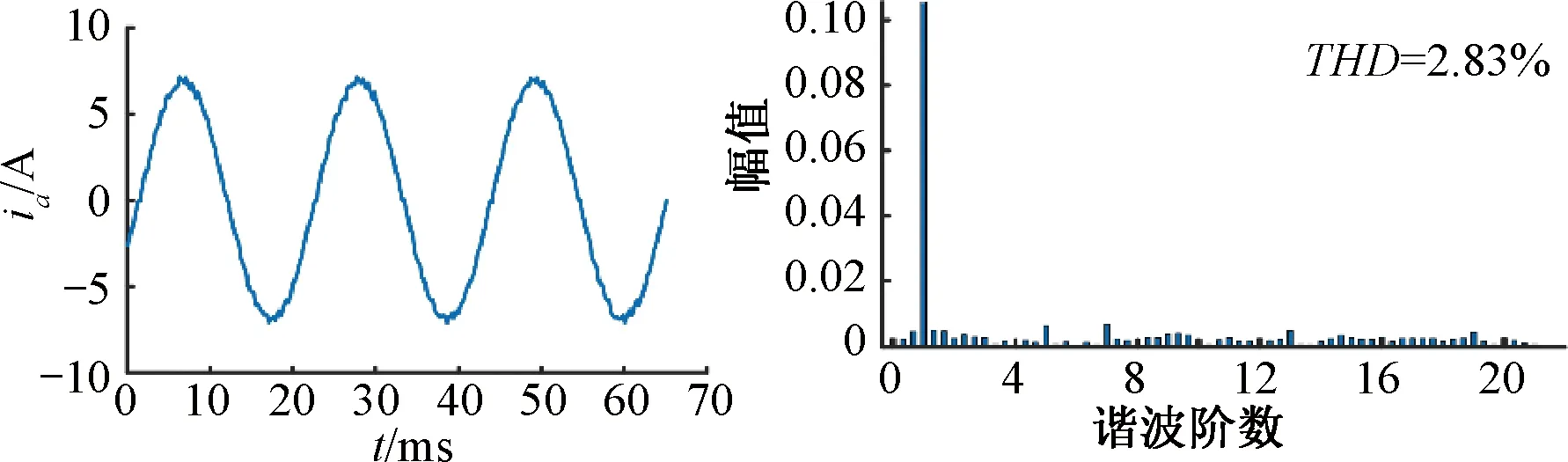
图11 加入自适应电压补偿时A相电流仿真波形及其THD值
图9~图11分别为未加入补偿、加入电压前馈补偿、加入自适应补偿时的A相电流波形。由图9可看出,受逆变器非线性的影响,PMSM的A相电流发生明显的畸变,这将会引起转矩脉动,影响电机的稳定运行。通过对比可以看出,随着不同方式补偿的加入,电机A相电流波形的畸变逐渐改善,趋向于正弦,分别对三种情况下的A相电流进行FFT分析,其总谐波失真THD值分别为10.59%、4.56%、2.83%,由谐波引起的波形失真程度逐渐减小。由仿真结果可以看出,自适应补偿算法能够在电压前馈补偿的基础上,进一步增强了逆变器非线性补偿效果,改善了电机三相电流的畸变。
5 实验验证
本文采用的实物实验平台如图12所示。电机额定功率400 W,额定转速3 000 r/min,额定转矩1.27 N·m,其他参数以及逆变器参数和仿真环境中设定的一致,控制系统使用TMS320F28379D为主控芯片的逆变器模块,负载使用磁粉制动器,电机运行过程中加载0.1 N·m,电机A相电流通过示波器观测,d轴、q轴电流通过CAN总线通信上传到PC端进行存储和观测。
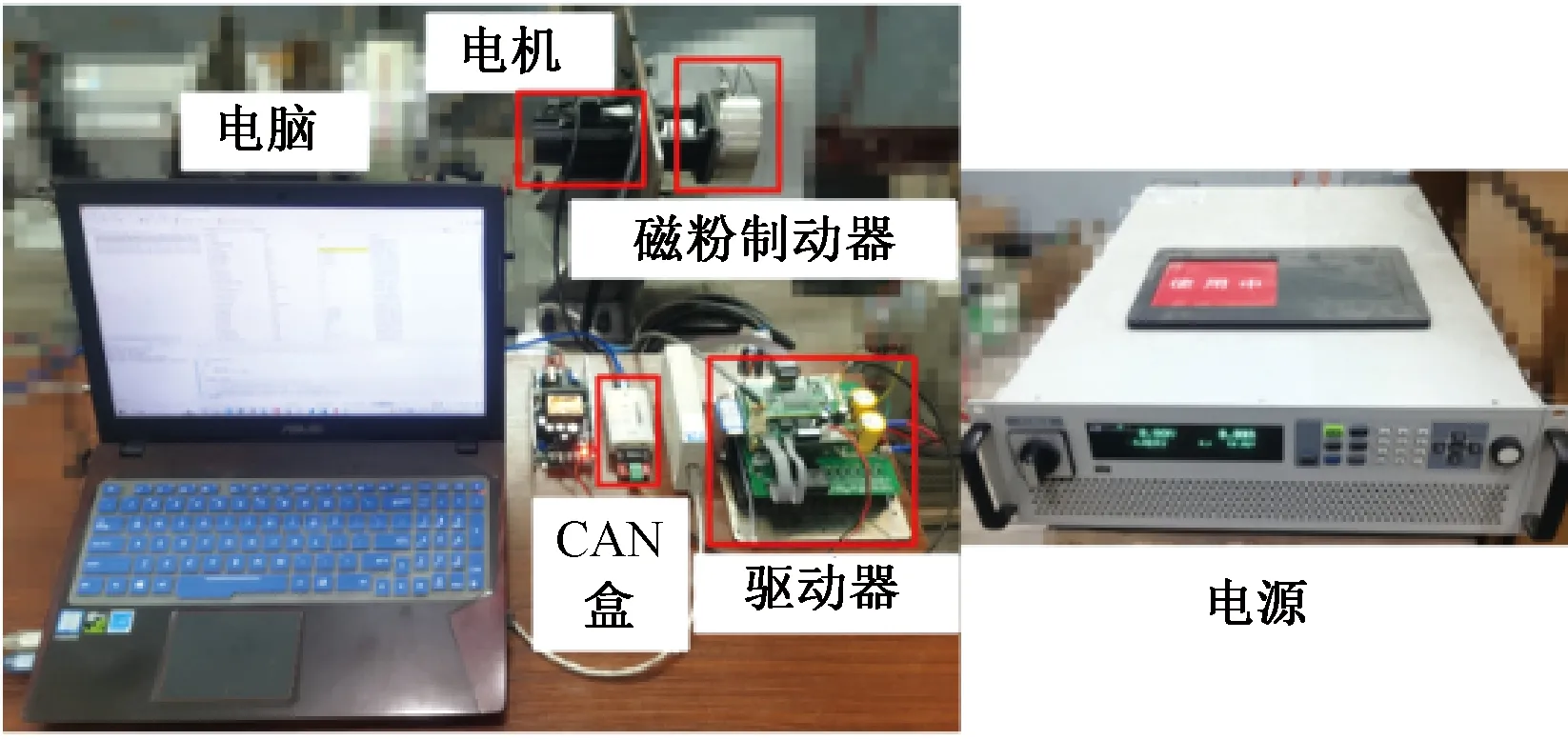
图12 实物实验平台
为了验证自适应逆变器非线性补偿,分别给定PMSM转速200 r/min和2 000 r/min,实验波形如图13~图17所示,并对A相电流波形进行FFT分析。

图13 未加补偿的A相电流实验波形

图14 加入电压前馈补偿的A相电流实验波形
图13~图15分别为200 r/min、2 000 r/min下未加补偿、加入电压前馈补偿、加入自适应补偿的A相电流波形以及对应的FFT分析,图16~图17分别为上述情况下q轴、d轴的电流波形。各组对比实验中的THD值、id和iq的波动值如表2所示。

表2 3种补偿状态下实验结果对比表
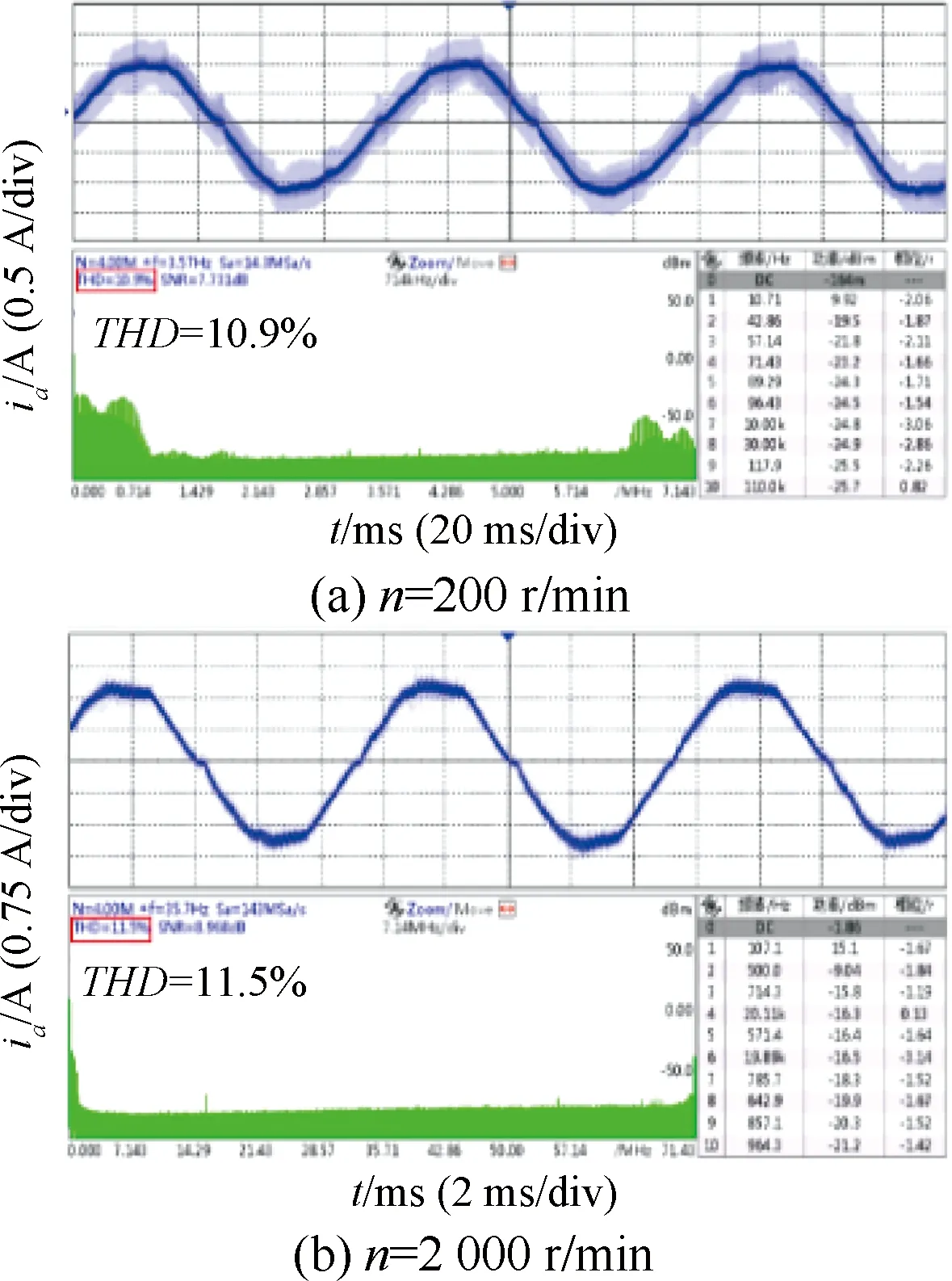
图15 加入自适应补偿的A相电流实验波形
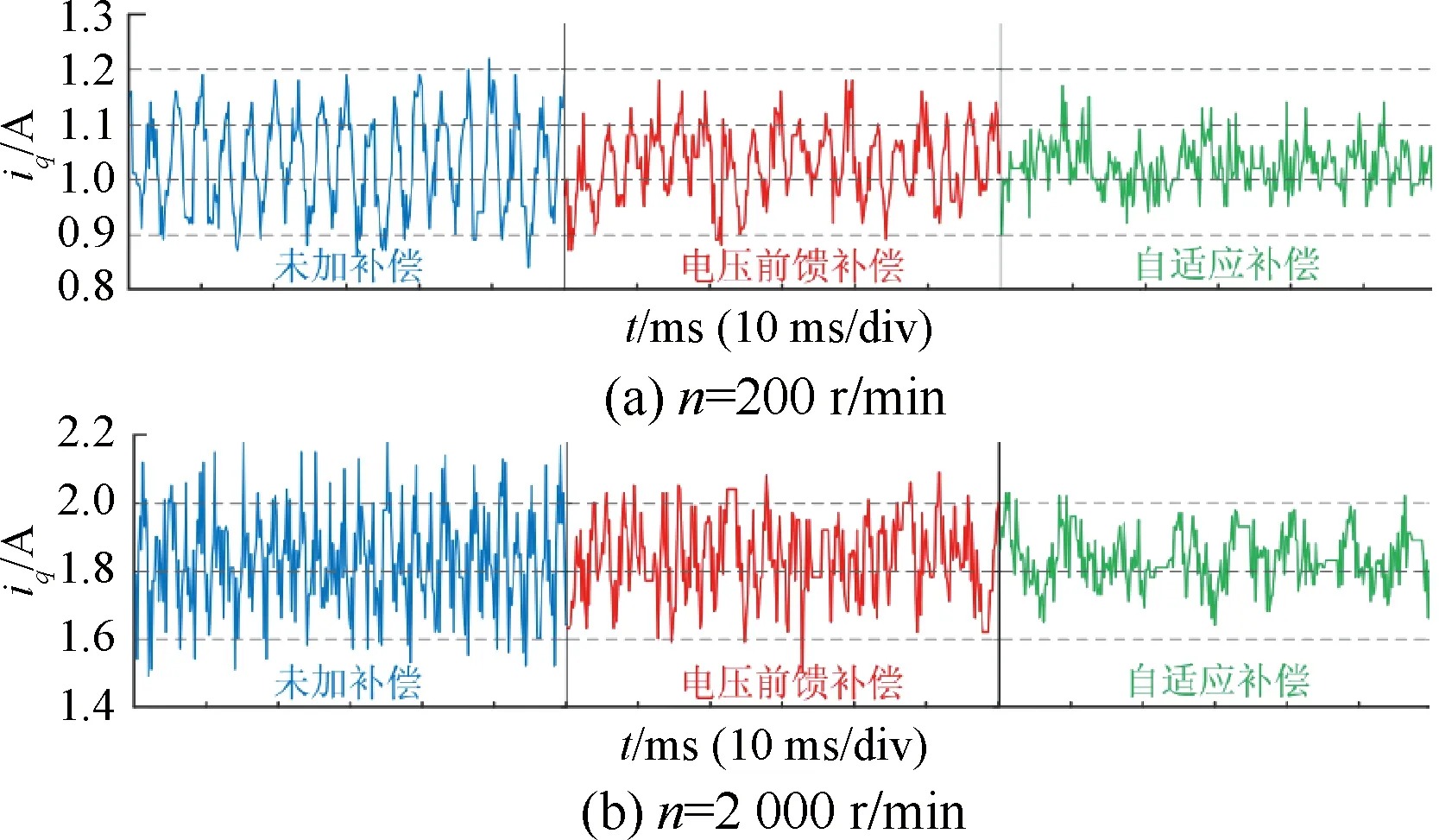
图16 q轴电流实验波形
通过图13~图17以及表2中的实验数据对比可得,在电机转速为200 r/min的情况下,随着补偿算法的改进,A相电流的畸变逐渐减小,电压前馈补偿和自适应补偿的THD值对比于未补偿时分别减小了10.98%和33.54%;d,q轴电流的波动幅值逐渐减小,其中iq的波动幅值对比于未补偿时分别降低了18.92%和35.14%,id的波动幅值分别降低了25.53%和46.81%;而在电机转速为2 000 r/min的情况下,THD值分别减小了17.53%和25.32%;iq的波动幅值分别降低了14.29%和47.14%,id的波动幅值分别降低了28.95%和47.37%。由实验结果可得,本文的自适应补偿算法能有效地改善电机定子三相电流波形,降低d,q轴电流的误差波动,减小PMSM转矩脉动,且算法简单易实现,具有良好的工程应用价值。
6 结 语
本文的自适应补偿,在传统电压前馈补偿的基础上,充分考虑了逆变器开关管开通/关断时间、导通管压降,二极管续流管压降等非线性因素的不确定性,利用PMSM控制系统中α,β轴的电流误差,自适应地修正电压前馈补偿,进一步改善了补偿效果,增强了系统的稳定性。该算法简单易实现,对电机和逆变器模型参数的依赖程度小且工程实用性强。仿真和实验结果验证了算法的有效性。
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
新型工业化(2021年8期)2021-10-23 10:27:10
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
电子与封装(2021年7期)2021-07-29 10:58:48
防爆电机(2021年1期)2021-03-29 03:02:46
测控技术(2018年2期)2018-12-09 09:00:52
现代防御技术(2016年1期)2016-06-01 12:13:28
新高考·高一物理(2016年1期)2016-03-05 22:47:39
电机与控制应用(2015年10期)2015-03-01 03:50:16
电测与仪表(2014年21期)2014-04-04 12:32:08