
机器人辅助与传统手术治疗股骨转子间骨折的前瞻性研究
2023-10-07 03:01肖伟元金翔赟周春曹昕琪白佳润郭韵悦黄平董宇启
实用骨科杂志 2023年9期
肖伟元,金翔赟*,周春,曹昕琪,白佳润,郭韵悦,黄平,董宇启*
(1.上海交通大学医学院附属仁济医院创伤骨科,上海 200127;2.上海交通大学医学院附属仁济医院临床研究中心,上海 200127)
股骨转子间骨折常见于老年人群,骨折后需长期卧床,易导致肺部感染、尿路感染、褥疮、深静脉血栓等并发症,1年内死亡率可达30%[1],被称为人生的最后一次骨折。股骨近端髓内钉是固定股骨转子间骨折最常用的手术方案之一,通过手术固定可以减轻骨折对患者造成的痛苦并帮助患者早期进行床上功能锻炼,从而降低长期卧床导致的各类并发症。股骨近端髓内钉的拉力螺钉在股骨头中心的位置与其从股骨头中切出的概率密切相关[2],因此术中如何准确置入拉力螺钉是手术的关键。
手术机器人最早在1985年被应用于脑外科手术中,此后以“达芬奇”为代表的手术机器人被广泛应用于普外科、胸外科、泌尿外科、妇产科等外科手术中[3]。1992年,手术机器人开始应用于骨科手术[4],骨科手术机器人通过术中的X线或CT图像采集,结合术中实时跟踪系统,将手术部位与机器人操作位置进行匹配,从而指导医生进行术中定位和内固定置入,具有准确、微创的优点。其目前已在髋膝关节置换、脊柱椎弓根螺钉置入以及骨折内固定等手术中投入应用[5-7]。
本研究在股骨近端髓内钉治疗股骨转子间骨折手术中,应用骨科手术机器人辅助定位置入拉力螺钉,并与传统手术方法进行比较,观察两者的疗效差异,现报告如下。
1 资料与方法
1.1 纳入排除标准 纳入标准:(1)AO分型为A1.2~A2.2型的股骨转子间骨折[8];(2)骨折发生在2周内;(3)年龄为50~90岁;(4)能充分理解并自愿签署知情同意。满足以上全部条件可入组。排除标准:(1)术中闭合复位失败需切开复位;(2)术中使用股骨近端髓内钉长钉进行固定;(3)开放性骨折;(4)病理性骨折;(5)严重血流动力学不稳定,需要急诊手术干预者;(6)合并其他脏器损伤或骨折需要手术等额外处理者;(7)伴随神经运动功能损伤,或者下肢肌力异常者;(8)全身情况或伴发疾病难以耐受手术者,如:凝血功能障碍,或者心、肝、肾功能不全者;(9)全身或局部严重感染者。符合以上条件中的一项者即需排除。
1.2 一般资料 本研究为前瞻性随机对照研究,纳入2021年1月至2022年6月在上海交通大学医学院附属仁济医院接受手术治疗的股骨转子间骨折患者。研究获得本单位伦理委员会批准(KY2020-201),并在中国临床试验注册中心注册(ChiCTR2100043984),所有患者均签署知情同意书。
本研究共纳入50例患者,纳入患者采用随机信封法分配为机器人辅助组和传统手术组各25例。其中传统手术组中1例患者术后2周时因肺栓塞导致死亡,其余患者术后随访时间均>12个月。两组患者性别、年龄、身体质量指数(body mass index,BMI)、骨折AO分型等术前一般资料比较,差异均无统计学意义,具有可比性(见表1)。

表1 两组患者一般资料比较
1.3 围手术期处理
1.3.1 术前准备 (1)入院后完善术前检查,行下肢静脉血管彩超排除深静脉血栓;(2)骨折后24 h内开始使用低分子肝素1支,每日1次,预防深静脉血栓,术前12 h停用。
1.3.2 手术方法 手术采用气静麻醉,所有患者均由副高以上医师主刀,术中内置物为亚洲型解剖股骨髓内钉短钉。患者取平卧位,患肢置于牵引架,健侧肢体置于截石位架上以便术中透视。C型臂透视辅助下,行闭合牵引复位,正侧位透视确认骨折复位满意。常规消毒铺巾,传统手术组置入股骨近端髓内钉主钉并透视确认后在透视辅助下分别置入近端拉力螺钉、远端锁定钉和尾帽,再次透视确认后冲洗并缝合切口。机器人辅助手术组应用天玑骨科机器人,在置入股骨近端髓内钉主钉后,安装患者示踪器,展开骨科手术机器人,安装机械臂示踪器及标尺,使用C型臂采集患侧髋关节正侧位图像,并确保标尺上的10个定位点均在视野内。将C型臂采集的图像导入到主控台,由主控台完成近端拉力螺钉导针的置入规划路径(见图1)。运行机器人机械臂,按照规划路径定位导针的置入方向并安装套筒及导针,将髓内钉导航支架的拉力螺钉套筒移至与导针位置一致(见图2),置入近端拉力螺钉导针并置入近端拉力螺钉,再依次安装远端锁定钉和尾帽,透视确认后冲洗并缝合切口。
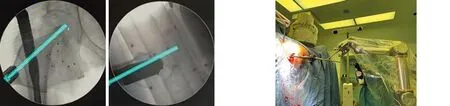
图1 采集透视图像后,由主控台规划拉力螺钉位置 图2 机器人定位辅助下置入拉力螺钉导针
1.3.3 术后处理及随访 (1)术后6 h使用低分子肝素0.5支抗凝,术后第1天开始使用低分子肝素1支,每日1次抗凝,出院后改为口服拜瑞妥10 mg每日1次至术后42 d;(2)术后定期行伤口换药,术后2周拆线;(3)术后第1天开始在康复科指导下进行床上功能锻炼,下地负重时间由主刀医生确定;(4)出院前拍摄髋关节正侧位X线及CT,门诊定期随访。
1.4 观察指标 主要观察指标为术后尖顶距(tip-apex distance,TAD)[9]及拉力螺钉在股骨头中心位置[10]。TAD指分别在正位和侧位X线片上,测量从拉力螺钉的尖端到股骨头顶端的距离,予以校正后,将两者相加得出的总和(见图3)。拉力螺钉位置的评价采用克利夫兰分区法,在正、侧位X线片上分别以“上、中、下”和“前、中、后”来评价拉力螺钉的位置,螺钉位于5区或8区为位置优良(见图4)。次要观察指标为拉力螺钉置钉过程中导针穿刺次数及透视次数。此外,记录手术时间、术中出血量、术后12个月髋关节功能评分(Harris评分)[11],记录围手术期深静脉血栓发生情况及术后内固定失效等并发症情况。
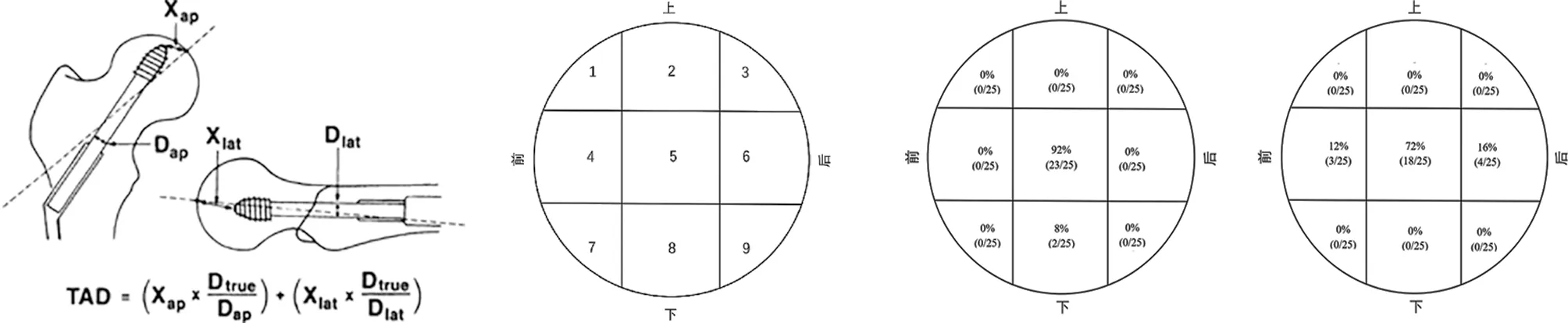
图3 TAD测量示意图 图4 克利夫兰分区示意图 图5 机器人辅助组螺钉位置分布情况 图6 传统手术组螺钉位置分布情况

2 结 果
50例患者均获得随访,机器人辅助组随访时间12~16个月,平均(13.1±1.0)个月;传统手术组随访时间3~18个月,平均(13.2±2.9)个月。
2.1 术后TAD值 机器人辅助组TAD值为(13.70±1.91) mm,传统手术组TAD值为(15.77±2.57) mm,机器人辅助组TAD值低于传统手术组,差异有统计学意义(P=0.002)。
2.2 术后拉力螺钉位置 机器人辅助组拉力螺钉位置优良率为100%,传统手术组拉力螺钉位置优良率为72%,机器人辅助组拉力螺钉位置优良率高于传统手术组,差异有统计学意义(P=0.004)。具体螺钉分布情况见图5~6。
2.3 术中情况 在拉力螺钉置钉过程中,机器人辅助组穿刺次数为(1.0±0.2)次,传统手术组穿刺次数为(2.3±1.2)次,机器人辅助组穿刺次数显著低于传统手术组,差异有统计学意义(P<0.001);机器人辅助组透视次数为(4.4±0.6)次,传统手术组透视次数为(5.4±1.2)次,机器人辅助组透视次数显著低于传统手术组,差异有统计学意义(P=0.001)。两组患者的手术时间、术中出血量比较,差异无统计学意义(P>0.05,见表2)。

表2 两组患者术中情况比较
2.4 术后Harris评分 术后12个月,机器人辅助组患者Harris评分为(83.7±6.2)分,传统手术组患者Harris评分为(81.2±6.7),两者差异无统计学意义(P=0.186)。
2.5 并发症及预后情况 2例患者术前下肢血管B超提示深静脉血栓形成,其中机器人辅助组1例,传统手术组1例,2例患者均于术前行下腔静脉滤器置入术。传统手术组中1例患者术后2周时因肺栓塞导致死亡,其余患者末次随访时骨折均愈合。
3 讨 论
股骨近端髓内钉内固定是治疗股骨转子间骨折的首选方案,而拉力螺钉在股骨头中心的位置被认为是手术过程中的关键步骤[14]。拉力螺钉由股骨外侧皮质向股骨头中心置入,术中必须通过不断透视,调整进针的位置以及进针的角度,从而获得最佳的置入路径。反复的透视、穿刺会增加患者的创伤,另一方面,初始的进针路径会形成一条既有通道,在进行微调时导针极有可能滑入这条原有的通道,难以实现有效的调整。天玑骨科手术机器人可以规划手术器械的空间定位,通过机械臂的运动使手术器械置入相应的解剖部位,具有安全、准确、稳定的特点。通过实时监测,它还可以自我修正路径,保证规划路径与手术路径一致,为术中内置物置入路径提供定位辅助,其精确度可达毫米级(误差<0.8 mm)[15]。本研究将天玑骨科机器人应用于股骨转子间骨折拉力螺钉的置入过程中,研究结果表明天玑骨科机器人辅助可以提高拉力螺钉置入的准确性,减少置入过程中的穿刺次数和透视次数,从而确保手术的准确性并减少手术的创伤。
既往已有研究将天玑骨科机器人应用于股骨转子间骨折的手术中,但均应用于辅助股骨髓内钉主钉的置入。Lan等[16]应用天玑骨科机器人辅助定位股骨髓内钉主钉的进针点,结果表明机器人辅助组手术时间更短、术中出血量更少,术中导针穿刺次数以及术中透视次数也明显低于传统手术组。但本研究预实验时发现,使用天玑骨科机器人辅助定位股骨髓内钉进针点时,由于主钉导针的置入方向往往需要尽可能靠近躯干从而顺利进入股骨髓腔,因此会出现机器人机械臂运行时被患者身体阻挡而无法达到指定位置的情况,尤其是患者体型比较肥胖时,会严重影响定位的准确性。张朕等[17]也报道了类似情况,在实际操作中,他们规划时正位X线片上定位入针点在大转子最高点位置且方向外展约40 °,从而避免软组织遮挡,但在置入导针时需2次进针。第1次在机器人定位下进针,以取得入针点为目的,再将机器人机械臂撤出后进行第2次进针。由于操作步骤相对繁琐并且存在一定的不确定性,因此本研究仅将机器人辅助应用于拉力螺钉的置入。
此外,其他计算机辅助定位技术也被应用于股骨近端髓内钉拉力螺钉的置入过程中。美国一公司针对Gamma 3髓内钉设计了配套拉力钉定位系统(ADAPT),该系统由主机、固定于髓内钉支架上的ADAPT Clip以及捆绑于C型臂接收端的FluoroDisc组成,术中连接完成并进行正侧位透视后,该系统可以实时模拟拉力螺钉在股骨头中心的位置[18]。Simcox等[19]将ADAPT与传统手术方法进行了比较,结果发现ADAPT组患者术后TAD值更低(P=0.023),螺钉位置的优良率更高(P=0.024),这一结果与本研究结果类似。因此,天玑骨科机器人与ADAPT系统都可以有效提高拉力螺钉置入的准确性。相较于ADAPT系统,天玑骨科机器人辅助置钉需要额外做辅助切口,安装患者示踪器,但天玑骨科机器人可以应用于任何一种股骨髓内钉系统,而ADAPT系统只能匹配该公司Gamma 3髓内钉使用。
在手术时间方面,骨科机器人的安装、定位需要花费一定时间,但其中一些步骤可以由助手在手术过程中同步进行,在操作熟练后,机器人所花费的时间可以被稳定控制在5 min以内。而机器人的使用可以明显提高置钉的成功率,省去了反复透视穿刺的时间。谭哲等[20]报道机器人辅助股骨近端髓内钉手术的手术时间要短于传统手术组。张朕等[17]报道两者在手术时间方面差异无统计学意义。本研究中,机器人辅助组与传统手术组在手术时间方面差异无统计学意义。总体而言,机器人辅助并不增加手术时间。
值得注意的是,虽然本研究中机器人辅助组的TAD值更低,但传统手术组的平均TAD同样只有16 mm,符合TAD值<25 mm的标准[21],并且两组患者术后1年髋关节功能评分差异无统计学意义。股骨转子间骨折患者的预后与骨折分型、骨质疏松程度、复位质量、内固定选择、拉力螺钉位置及骨折前的身体情况等均相关[22-24]。因此,尽管机器人辅助可以提高拉力螺钉置入的准确性,但患者是否能从中获益还有待进一步研究。结合考虑机器人手术产生的额外费用,笔者认为,对于年纪较轻、复位后稳定、预期可尝试早期下地的患者,机器人辅助技术可以确保更好的拉力螺钉位置和更合适的TAD值,帮助患者早期下地康复。而对于高龄、骨质疏松、粉碎性骨折的患者,手术的主要目的是解决疼痛、方便床上护理,术后TAD值在标准范围内即可,因而不必应用机器人辅助技术过分追求TAD值。
本研究尚存在以下不足:(1)手术主刀为副高以上医师,但并非由同一人完成,因此手术技巧、复位及置钉要求等存在一定差异,可能会对手术时间、TAD值、透视次数等造成一定影响。(2)由于体位遮挡的原因,本研究未能实现机器人辅助下股骨髓内钉主钉的置钉,相信随着机器人机械臂的改进以及机器人跟踪系统的优化,骨科机器人将进一步应用到各类骨科手术中。
综上所述,应用骨科机器人辅助股骨近端髓内钉拉力螺钉的置入,可以减少术中导针穿刺次数及术中透视次数,同时获得更优良的螺钉位置以及更佳的TAD值,为患者提供更精确、更微创的治疗。
猜你喜欢
中国伤残医学(2022年14期)2022-12-23
航空发动机(2020年3期)2020-07-24
中华肩肘外科电子杂志(2019年4期)2019-08-24
发明与创新·中学生(2018年2期)2018-02-07
时代英语·高二(2017年4期)2017-08-11
天津体育学院学报(2016年3期)2016-12-18
医学教育管理(2015年3期)2015-12-01
实用手外科杂志(2015年2期)2015-08-28
实用手外科杂志(2015年4期)2015-08-27
中华肩肘外科电子杂志(2015年3期)2015-01-21
