
基于物联网的智能高速公路系统研究
2023-10-05 08:10李绍珍
电子设计工程 2023年19期
李绍珍
(云南省交通运输厅路网监测与应急指挥中心,云南昆明 650051)
随着智能交通系统的快速兴起与发展,使得高速公路管控越来越智能化。智能高速公路系统的主要目的就是将通信技术、物联网技术、计算机技术以及自动化控制技术应用到高速公路上[1]。依靠这些技术,加强了高速公路上的车辆与道路的联系,从而使高速公路上车辆的通行更加高效,有利于缓解交通拥堵和减少安全事故。物联网技术助力高速公路的智能化建设,即利用各种先进技术,采集车辆或道路的信息,并协同各类数据处理算法,获取车辆的速度及在道路上的位置等基本信息[2]。通过物联网技术,可以提供定位导航、事件检测等应用,提升交通运行效率,解决高速公路管理效率低下的问题。有学者提出了高速公路的智能化管理和服务平台的建设[3]。国外的智能高速公路系统起步较早,美国从20 世纪90 年代就开始尝试提出“信息化高速公路”的战略[4],大学与企业也逐渐开展相关研究。至2009 年,美国交通部发布规划,以无线连接为主,集成各类传感器技术和物联网技术将车辆、人、道路信息紧密地联系起来[5],从而完成智能驾驶的构想。在欧洲,英国、德国、意大利也普遍为高速公路配置了监控设备。欧盟在2006 年制定了《物联网战略研究路线图》,该路线制定的计划覆盖智能交通领域,同时为了响应该战略,欧盟国家开始大量为高速公路布置检测器、摄像机、电子标签等物联网设施[6]。日本政府也于2009年开始在全国高速公路部署智能化路侧设施,接入高速无线网络[7],从而避免交通事故的发生。在国内,智能高速公路在2010 年借助七大产业支柱之一的物联网产业的重要应用工程[8]持续发展,目前高速公路已完成全覆盖式不停车收费联网系统。智能高速公路系统一般包含信息发布功能、车速检测功能、紧急救援功能、车牌识别功能以及电子收费功能等。这些功能普遍作为辅助性手段,为交通管理者或监督者提供处罚或决策依据。
随着移动互联网信息技术的快速发展,移动支付手段相较于传统的现金支付和银行刷卡结算更具有方便、快捷、减少假币流通等优势。以二维码支付为代表的移动支付手段在商品支付交易中占有较大的市场份额,受到广大消费者青睐。然而,科技进步带给人们新享受的同时也催生了财产犯罪的新样态。
1 物联网相关技术
1.1 GPS定位技术
将GPS 设备安装在车辆上,高速公路的管理中心可以收到车辆的基本定位信息并进行数据处理,也能发布高速公路的道路信息以及沿途的气象状况、事故发生状况等[9]。车辆依靠GPS 技术可以选择以最佳行驶路线达到目的地。GPS 定位技术具有全天候、抗干扰、全球化等诸多特点。GPS 定位系统由分布于地球上空6 个轨道不少于24 颗卫星以及主控站、地面站和各类GPS 接收器等组成[10]。通过接收到卫星的数据信息,用以确定用户位置,卫星与接收器的空间位置如图1 所示。
苏:在我很小的时候,就见妈妈和外婆都跳沙朗舞,那时候也不知道什么是沙朗舞,反正就是跟着跳。有时候,白天跟着父母忙活路,累得不得了,晚上饭一吃,把桌子一搬,就在楼板上跳,跳得楼板都要断了。记得那时候,跳沙朗舞就像是着了魔一样。因为我自幼受母亲苏世珍的影响,每逢节庆与丰收的日子,便跟着母亲一起在寨子里跳起欢快的沙朗舞。后来随着沙朗舞技能的逐渐提升,名气也越来越大,慢慢被更多的人熟知,我也曾作为沙朗舞中的领舞者,多次代表北川县羌族同胞,到省市参加比赛和演出,就这样一点一滴地将羌族沙朗艺术发扬光大!
卫星部分都具有自己的空间坐标,例如卫星坐标为(X1,Y1,Z1),向外发射信号,而接收器的空间位置为(X,Y,Z),用以接收数据。因此,理论上卫星与接收器的空间距离如式(1)所示。
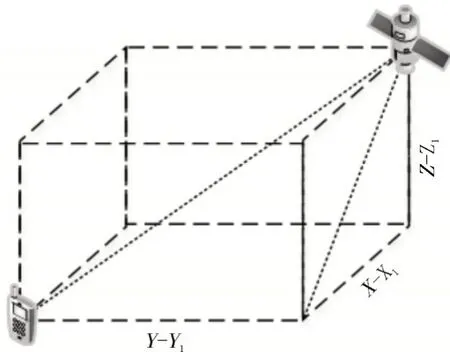
图1 卫星与接收器的距离
视觉数据或者图像数据的物联网采集技术,大多依赖于高速摄像机的使用。摄像机大多数需要满足图像或者视频数据的实时分发以及查询的要求[11],尤其对于网络中的视频摄像采集设施会采用数字信号处理(DSP)信号。通过使用DSP 芯片可以增强图像效果[12],对数字噪声有一定的抑制作用,具有宽动态、真彩色以及运动补偿的特点[13]。而且在通信协议中,对于视频网络的时延、抖动、丢包问题[14],视频数据传感器都会进行适当的光补偿,以利于高速公路上的视频数据采集。摄像机一般部署在道路的正上方或者道路侧,高度设置在5~10 m 左右,通常摄像头的空间布置示意图如图3 所示。
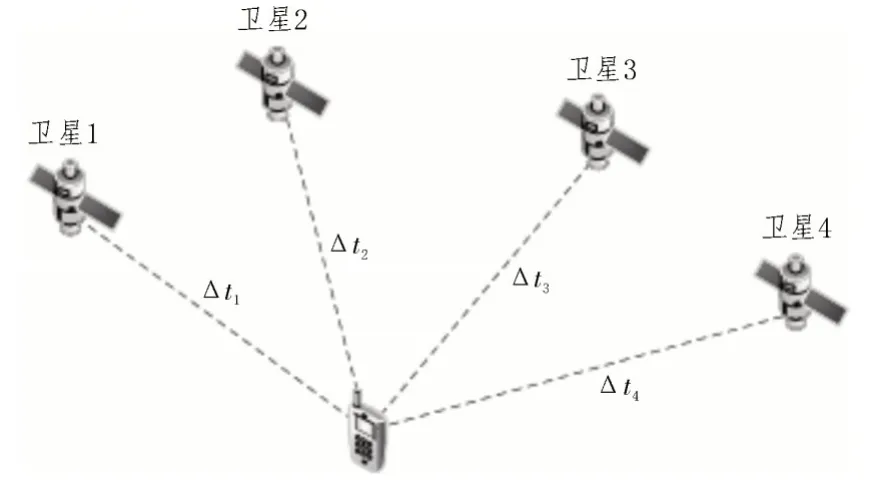
图2 卫星定位示意图
1.2 视频传感器采集技术
由于GPS 接收器与地球轨道上的卫星很难达到时间同步,总会存在一些误差,将伪距离差作为c(T-T1)。由于存在卫星与接收器的时间差Δt,一般为了实现精确定位的目的需要4 颗卫星。经过修正可利用式(2)进行计算,其中X、Y、Z、Δt作为待求解变量,如图2 所示。可以看出接收器的定位精度严格受到卫星精度、卫星时钟以及介质中光速的影响。
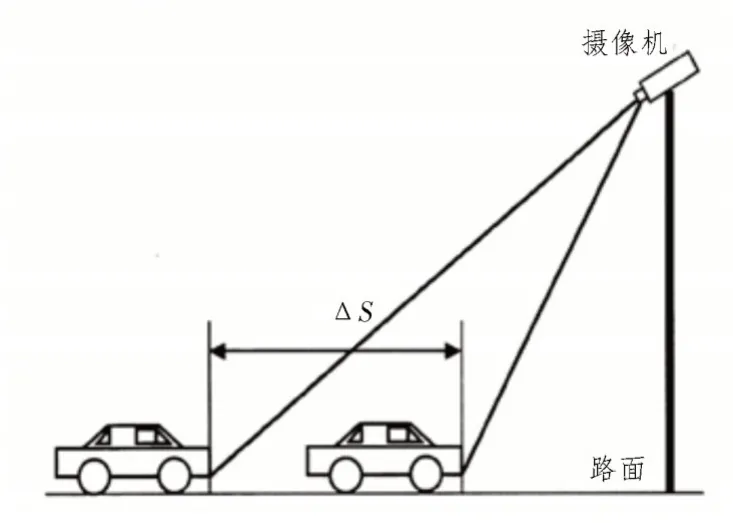
图3 摄像机与道路的位置示意图
2 车辆速度检测功能模块
2.1 算法设计
5)对存在质量问题的两位三通电磁阀、联锁触头等主断部件反馈给主机厂,找出部件源头质量存在的原因,杜绝机车主断源头质量问题的发生。

图4 虚拟线圈测速原理示意图
车牌号的识别方法是基于高速公路摄像机采集的图像,待定位出车牌的位置后,再进行二值化处理,如图12 所示。对于二值化处理后的图像进行垂直投影,确保能将车牌上的字符精准地分割开,其效果图如图13 所示,可以看出每个波峰附近的位置都对应一个字符,而波谷的位置则用以判断字符间隔。最后,再将这些分割好的单个字符放入字符库中比对,识别出每个正确的字符。

图5 车辆速度检测算法流程图
2.2 模块功能实现结果
从车身上精准定位出车牌位置之后,需要对车牌上的字符进行分割,从而逐个识别出来。重点针对高速公路上的小型汽车与载客汽车进行研究,这两类车型的车牌具有较为一致的特征。车牌区域的长宽比通常为7∶22,字符的高宽比为2∶1。车牌一共有7个字符,第一个字符为汉字,后六个字符为26个大写字母和10个数字部分组合而成,可以利用垂直投影的分割法对采集到的图像进行分割。通过采用局部二值模式(LBP)的图像识别算法,对车牌字符样本的LBP特征进行提取,然后放入到训练好的神经网络模型中,对字符结果进行识别。图10为车牌识别模块的设计框图。
基于物联网的视频图像采集技术,对智能高速公路系统进行研究,重点阐述系统的车辆速度检测功能模块和车牌识别功能模块。其中,基于视频的车辆速度检测功能是系统的重要组成部分,对于解决实时车辆速度的测量问题以及同时对多车辆的速度测量具有突出的优势。车辆速度检测算法原理是依据视频图像设定的虚拟线圈进行车速检测[15],假设两个线圈的距离为ΔS,车辆经过第一个线圈时,此刻计时为T1,下一时刻经过虚拟线圈2,此刻计时为T2,那么时间差为T2-T1,根据速度公式就可以求出车辆的速度,其原理示意图如图4 所示。

图6 设置虚拟线圈效果图

图7 车辆经过虚拟线圈记录图

图8 车辆急速检测记录图
3 车牌识别功能模块
3.1 车牌识别功能设计与实现
采取适当改进的MSER 算法对车牌定位,首先将图像进行灰度处理,并将灰度处理后的图像转换成二值图像,转换的阈值取值规则为[0,255]。阈值增加会导致整体图像的亮度变大,从而显示出从白色逐渐过渡到黑色。而在阈值提升的过程中,图像部分区域亮度面积增长不明显的地方被称为稳定极值区,记为MSER+,相反地,从全白到全黑变化明显的区域记为MSER-。则该连通区域面积的变化v(i)的计算公式如式(4)所示:
在智能高速公路系统中,基于物联网的视频图像采集技术的最主要一项功能就是对车辆车牌的精确识别与记录。该功能设计的重点是如何依据图像监控信息对车牌号码进行正确识别,并且解决车牌定位算法精度不高以及严重依赖车牌底色的问题。由于车牌图像通常都是彩色的,依据灰度处理后图像的亮度信息区别,可以精准地定位车辆的车牌位置,并依据图像灰度处理后的垂直投影显示出的峰谷变化对字符进行分割识别。
2014年厦门市基层医疗机构就诊人次比2013年增长43.6%,管理前后血糖、糖化血红蛋白的达标率大幅提高,医疗费用开支降低50%以上,患者自我管理能力大幅提高。厦门市政策的支持:突破基本药物制度,针对糖尿病制定专门的医保支付政策,限制三级医院用药天数,倒逼到基层医院就诊开药等。区域医疗信息平台的建立使患者健康信息互联互通,有力支撑了三师共管技术共享[7]。
其中,Qi表示二值图像第i个连通区域的面积;Δ表示阈值的微小变化。如果v(i)小于阈值,则认定该区域为最大极值区域。整车的车牌位置识别方法流程图如图9 所示。
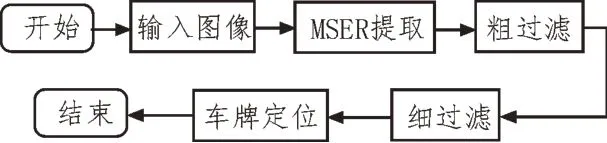
图9 车牌定位识别流程图
首先,在道路视频图像上设置两个虚拟线圈,其线圈的距离为0.9 m,如图6 所示。分析视频采集到的第67 帧图像和第80 帧图像,如图7 所示,可以看到进入虚拟线圈后,车辆用方框进行标记,并显示质心位置。由于摄像机的帧频为25 帧/秒,可以计算出该车的行驶速度v,如式(3)所示,其检测效果图如图8 所示,在图像的第81 帧体现出来,并且该帧图像记录了车牌号,一旦车辆有违法行为,智能交通系统就能进行记录,并对其行为实施处罚。
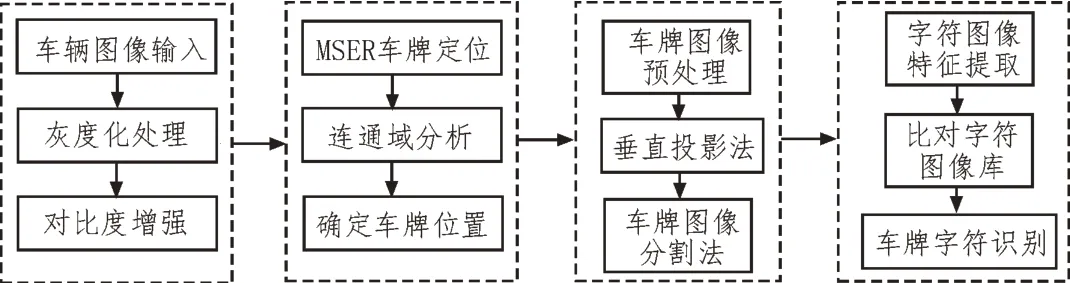
图10 车牌识别模块设计框图
首先,利用Matlab软件的detectMSERFeature 函数提取车牌MSER 区域,并将其转换为二值图像。然后通过车牌的长宽比与字符的宽长比的比例特征对图像进行过滤,剔除掉不符合的区域,最终只留下精准定位的车牌区域。该车牌定位过程效果图如图11所示。

图11 基于MSER的定位算法示意图
根据摄像头采集到的图像灰度值的变化,从算法中虚拟线圈的图像灰度产生改变的时刻开始计时,并对车辆的车牌号进行识别,但同一辆车行驶到第二个线圈时,根据GPS 定位技术,判断第二个线圈的图像灰度改变并计时,同时识别车牌后进行验证,判断是否为同一辆车。此时可以根据视频记录的间隔时间以及两个线圈的距离,检测车辆的速度,可以判断出车辆是否在高速公路上超速行驶。整体算法流程如图5 所示,该算法的复杂度较低、计算简单[16],并可以同时检测多辆汽车,同时还可以记录下车辆的车牌号,有利于识别高速公路上的违法行为,便于高速公路系统的控制管理。
2016年,Kosynkin等[9]研发了一种可应用于高温、高盐度储层的纳米粒子示踪剂。该技术的应用证明了纳米粒子在示踪地层情况方面具有重要的作用,为油田示踪剂的研发提供了新的思路。
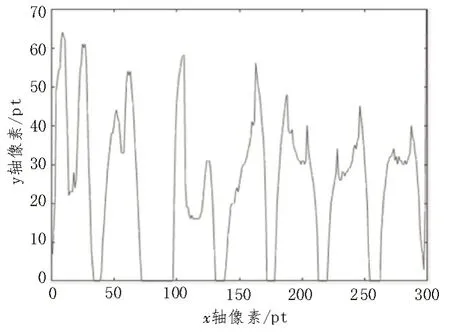
图13 车牌字符垂直投影效果图
3.2 实验结果与分析
通过对高速公路上行驶的汽车进行抓拍,再利用上述车牌识别功能模块,可实现智能化识别高速公路上同时行驶的不同汽车车牌的目的。对于定位出车牌位置的结果图,首先进行车牌字符的分割和归一化处理,对原始图像进行滤波处理,然后再灰度化处理,紧接着进行二值化处理。去除车牌边框之后,可以获得较为清晰的单个字符,并利用归一化的方法分解为40×20 pt 像素大小的图像,整个过程如图14 所示。对获得的单个字符,提取其LBP 字符特征,并将其放入到经过训练的神经网络中。该网络模型主要是依靠中国省份的汉字简称、10 个阿拉伯数字以及2 个大写英文字母完成训练。据此就可得出该车牌的识别结果,如图15 所示,可以看到车牌识别结果与车牌的实际情况一致,证明该功能模块实现的正确性与有效性。

图14 车牌字符分割与归一化处理(仅示部分车牌号码)
4 结论
1)阐述了国内外对于智能高速公路系统的研究现状,分析了用于交通系统的物联网相关技术,说明了物联网技术可以有效地提升高速公路的智能化效果。
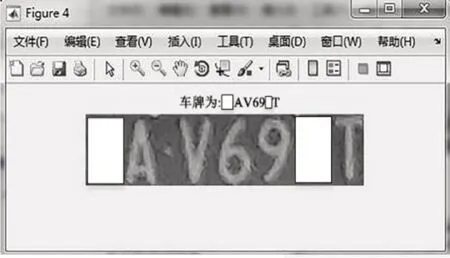
图15 车牌字符的识别结果(仅示部分车牌号码)
2)针对智能高速公路系统中的关键功能模块进行设计。对于车辆速度检测模块的设计采用虚拟线圈算法,可以获得车辆的实时速度信息,通过实验的方法说明该算法实现结果的正确性。
3)设计车牌识别功能模块,通过采集原始图像,对车牌进行位置锁定、字符分割以及字符识别,可将道路上同时行驶的不同车辆进行车牌识别,保障了车辆信息的收集作用。依据Matlab 的实验结果,证明了其算法实现的有效性,该模块能够准确识别单个或多个车辆在行驶过程中的车牌,有利于获取车辆信息,有利于识别超速等违法违规行为。
4)在未来的研究中,会对系统增加信息发布功能,后续还会关注路侧设施对车辆的无线通信技术,集成更多的智能化模块,扩大应用范围,为高速公路智能化的发展提供更多的解决方案。
猜你喜欢
大电机技术(2022年4期)2022-08-30
电脑爱好者(2022年15期)2022-05-30
中国特种设备安全(2021年5期)2021-11-06
小学生学习指导(低年级)(2019年12期)2019-12-04
电子制作(2019年19期)2019-11-23
模具制造(2019年7期)2019-09-25
电子制作(2019年12期)2019-07-16
少儿美术(快乐历史地理)(2018年7期)2018-11-16
小猕猴智力画刊(2017年5期)2017-05-25
电子制作(2017年22期)2017-02-02
