大量程高精度的新型弱光栅位移传感器研究
2023-09-20 12:56:22郑勇,余洁,易兴,刘磊,曾彬
压电与声光 2023年4期
郑 勇,余 洁,易 兴,刘 磊,曾 彬
(1. 重庆交通大学 河海学院,重庆 400074;2. 重庆科技学院 建筑工程学院,重庆 401331;3. 中国建筑第五工程局有限公司,湖南 长沙 410004)
0 引言
位移是工程结构健康监测中极关键的基本物理量之一,尤其在结构变形、开裂、土体沉降及边坡滑动监测等方面中具有重要作用[1]。目前传统的位移监测设备主要是电位器式、电容式、电阻式和电感式等位移传感器。该类传感器量程最大可达1 m,但测量精度一般为0.005%~2.000%,防水性和抗电磁性能差,易腐蚀,远程实时遥测效果不理想,因此,传统传感器的适用范畴很受限。
光纤传感技术因其体积小,质量小,抗电磁射频干扰,具备遥感和分布式传感能力等优势而广泛应用于土木工程健康监测中[2-5]。基于光纤传感原理的传感器主要有基于光纤和光纤光栅两大类。基于光纤传感原理的传感器精度及灵敏度较低,而基于光纤光栅传感原理的传感器具有高灵敏度及高分辨率优势,使用更普遍。1978年,Ken Hill等[6]制造出世界首个光纤光栅,阿迪王后光纤光栅传感技术蓬勃发展,目前基于光纤光栅原理的传感技术得到了极大的发展,光纤光栅位移传感器一直是热点研究问题。
王俊杰等[7]利用弹簧和悬臂梁结构研制了一种新型光纤光栅位移传感器,位移分辨率为0.05%,但存在波长的零点漂移。杨秀峰等[8]研究了一种基于杠杆原理的位移传感器,利用力臂尺寸比例放大位移,位移灵敏度达到12.5 nm/mm,而量程仅0.2 mm。SANADA H等[9]提出了一种U型形式光纤光栅传感结构,在5 mm小范围量程内,具有1.035 nm/mm的灵敏度。SHEN C Y等[10]基于双等腰三角形悬臂梁结构设计了一种位移传感器,量程可达20 mm,且灵敏度为0.058 nm/mm,但其结构形式较特殊。孙丽等[11]研制出基于楔形结构光纤光栅位移传感器,灵敏度系数可达13.77 pm/mm,但量程较小。郭永兴等[12]基于等强度梁原理,进一步结合楔形滑块,提出了一种滑动式光纤光栅位移传感器,量程可以达到10 cm且灵敏度为20.11 pm/mm,但其组件复杂,加工制作难度高。谭跃刚等[13]设计出一种弓型结构光纤光栅位移传感器,量程较小,仅为1 mm,灵敏度可达2.02 pm/mm。吕国辉等[14]设计了一种基于椭圆形式位移放大传感器,在10 cm量程内,位移分辨率达到6.1 pm/mm。在上述研究的光纤光栅位移传感器中,一类传感器灵敏度较高,但量程较小;另一类传感器虽可同时具备一定量程和较高灵敏度,但其结构形式较复杂,加工难度高。
最近兴起的弱光纤光栅(wFBG)[15-16]与传统的强反射光栅的强反射率相反,其常规反射率约为0.1%。wFBG不仅具有强光栅的传感特点,且可大量矩阵式复刻,从而提升传感测量的距离。因此,本文基于弱光栅传感原理和杠杆原理设计了一种具有大量程、高精度的弱光栅位移传感器,推导了其对传感位移的放大效果,建立了弱光栅中心波长变化与被测位移的关系式,对传感器进行了标定测试和模型试验。结果证明,该位移传感器结构简单,具备较好精度和较大量程,拥有良好的工程应用前景。
1 传感器结构和测量原理
1.1 传感器结构选型
传感器常见结构形式有X型、弓型、环形、U型及圆弧型等。综合考虑传力效率、稳定性、制作和架设便利等因素,本文选定X型结构为基础形式进行改进。图1为本文设计的5种轴对称结构形式。图中,Lx为下部待测体产生的位移,Ls为结构变形协调引起上部发生的位移,θ1为两上臂铰接与水平方向角度,θ2为两臂内外拐与水平方向角度,L3为两臂上部直立段,L2、L1分别为两臂铰接上、下部段,L4为两臂下拐。
如图1所示,传感单元布设在结构顶部,下部连接待测体。为使上部传感单元尽可能在较短的长度产生足够大的位移,必须设置弹簧扩大位移。但弹簧有一定的直径,为保证弹簧能自由变形,有必要在每种结构的上部加竖直段。进一步确定5种结构形式的位移方法效果,设位移放大倍数β=Lx/Ls,则由图1(a)可得:
2L1cosθ1
(1)
由图1(b)可得:
(2)
由图1(c)可得:
(3)
由图1(d)可得:
2L1cosθ1
(4)
由图1(e)可得:
2L3cosθ1
(5)
为比较这5种结构的β值,在保证其总高H、夹角θ1、θ2和结构上部初始宽度L(传感单元初始长度)相同的情况下,求出满足结构协调变形关系的结构剩余尺寸,然后求出该结构尺寸下对应的β值。通过计算,所有结构均满足初始尺寸H=300 mm,L=28 mm,θ1=48°,θ2=26°时,以1 mm为步长,Ls从1 mm开始,逐渐增加,求出结构位移放大系数β。由于本文设计结构上部传感单元的存在(上部传感单元由弹簧和表面粘贴弱光栅的基片连接而成),为保证基片尽量长和装置变形运动过程中不受构件尺寸因素限制,同时保证弹簧提供基片的拉力在基片上产生的应变不过大而超出弱光栅应变感测范围,且不过小以致装置灵敏度太低,故先利用弹簧刚度设计公式,并考虑上部传感单元在允许尺寸范围来确定弹簧初始长度为12 mm,外径不超过∅3 mm,通过弹簧最大弹性伸长量计算得出在该尺寸下弹簧能达到最大伸长量约为16 mm,故取16 mm作为Ls上限值。用于计算各结构放大系数初始尺寸参数如表1所示。计算得到的Ls-β关系曲线如图2所示。

表1 用于计算各结构放大系数的初始尺寸

图2 各结构Ls-β关系曲线
由图2可知,在Ls逐渐增大的过程中,5种结构的β与Ls基本呈水平线性关系,X-SNGZL的β值从10减小到9.34,X-SWGZL的β值却从18.75增大到18.97,另外3种结构的β值变化趋势接近,从相同起始β值为15.14分别减小到14.29、14.46和14.22。在Ls逐渐增大过程中,X-SWGZL的β值始终大于其余任何结构,位移放大效果最佳。
为进一步校验图1中5种结构的最大量程,故上部位移Ls在增大过程中,5种结构在上部弹簧保持弹性状态时的量程如图3所示。

图3 各结构Ls-量程关系曲线
由图3可知,5种结构的最大量程与Ls的连线几乎都呈斜直线,X-SNGZL斜率最小,X-SWGZL的斜率最大,另外3种的斜率相近。尽管X-SNGZL的Ls可达16 mm,但其最大量程仅149 mm;而X-SWGZL的Ls最小(只有13 mm),但其量程最大(达247 mm)。另外3种的Ls虽可达到16 mm,但其最大量程为228~231 mm。
综上所述,本文采用弹簧连接表面粘贴弱光栅的基片组合形式共同作为上部传感结构,但由于弹簧本身尺寸和刚度问题导致实际情况中结构上部初始距离L和上部最大位移Ls存在上下限值,从结构最终所能达到的量程方面考虑,得出X-SWGZL在结构的高度和上部初始宽度均相同的条件下,其放大倍数和量程均最大。因此,本文选用X-SWGZL作为传感器的最优结构形式。
1.2 传感器结构设计
基于上述优选的X-SWGZL结构形式,本文设计了一种利用弱光栅传感原理的位移传感器,其主要部件包括固定脚构件,类X型钢杆件、螺栓、弹簧以及用于粘贴弱光栅的基片等,其结构形式如图4所示。上部传感单元组合形式如图5所示。
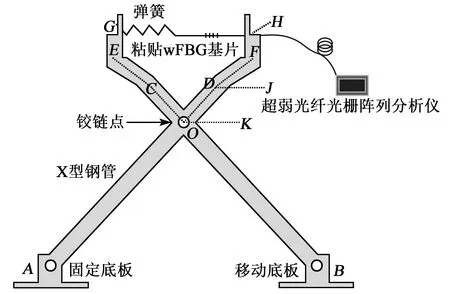
图4 基于弱光栅原理的新型位移传感器示意图
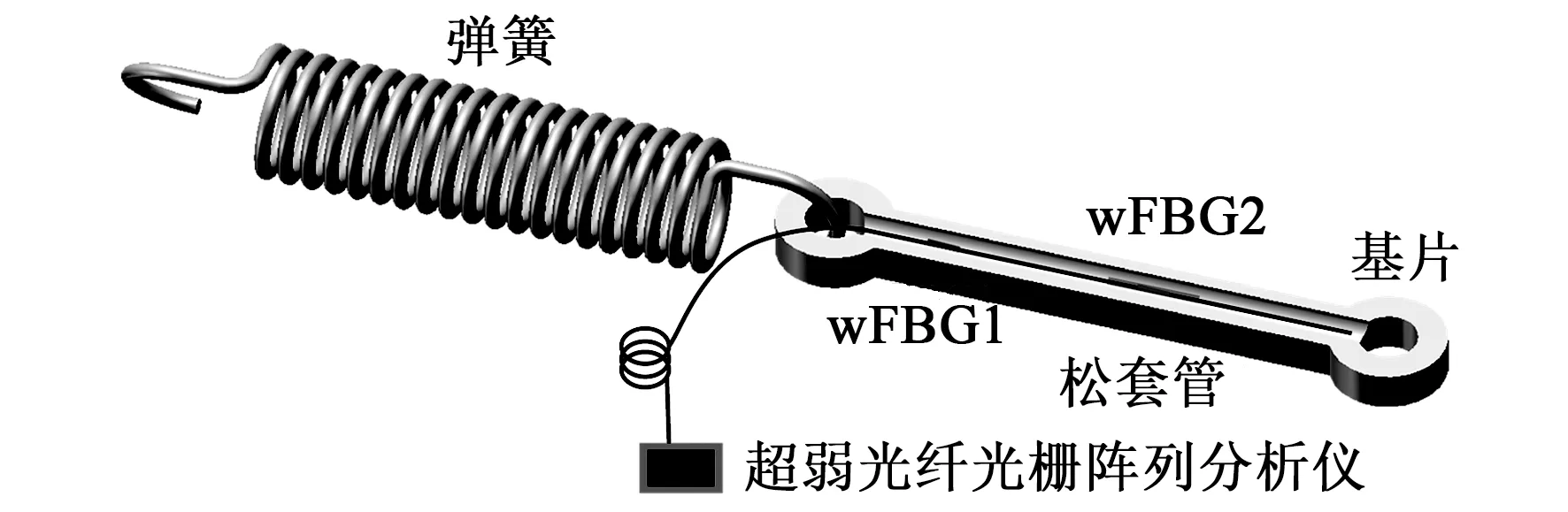
图5 上部传感单元示意图
图4中,AO=BO=L1,OC=OD=L2,CE=DF=L4,EG=FH=L3,θ1为OD与水平线OK之间夹角,θ2为DF与水平线DJ之间夹角。中间核心装置是由两根钢条中间使用螺栓连接,在L1、L2构成的纯X型构件顶部焊接上外拐段L4和上外伸段L3,最终构成改进的X-SWGZL型结构。上部核心构件由弹簧和基片连接而成,基片上使用502胶水将弱光栅1粘贴于基片中心轴向位置,松套管被胶水固定在基片中心处,弱光栅2穿过松套管作为温度补偿光栅使用,因此后续现场使用不需考虑温度的影响。
由于弱光栅可感测的应变范围有一定局限性,只有数千个微应变,距离小于2 cm可产生的位移小于0.2 mm,因此须用弹簧来使上部传感单元产生所需位移。传感器在测量时,弹簧左端连接在X-SWGZL型结构顶部左端,弹簧右端与基片左端连接,基片右端与X-SWGZL型结构顶部右端连接,当下部待测体发生位移时,下部宽度增大,从而引起上部宽度也增大,进而从左右两端拉伸弹簧和基片;弹簧受拉后伸长,基片受拉后根据变形协调而拉伸弱光栅使其产生轴向应变,根据产生的中心波长漂移可得到位移。
1.3 传感器测量原理
弱光栅的主要参量是谐振波长,wFBG中心波长为λB,中心波长变化取决于有效折射率neff和光栅周期Λ的敏感性。当基片受拉后,根据变形协调而拉伸弱光栅,使其产生轴向应变,温度改变引起热光效应,使光栅周期发生变化,同时由于应变产生光弹效应和温度引起热膨胀效应,使折射率发生变化。在轴向应变和温度共同作用下,弱光栅中心波长漂移为
ΔλB=2neffΔΛ+2ΔneffΛ=(1-Pe)ελB+
(α+ζ)ΔTλB
(6)
式中:Pe为有效弹光系数;ε为光栅产生的轴向应变;α为热膨胀系数;ζ为热光系数;ΔT为温度改变量。
对于温度改变量,在只需要测应变时,一般应进行温度补偿以消除温度改变的影响。结构本身变形引起光栅波长漂移可消除温度影响,则轴向应变为
(7)
当装置上部结构光栅和基片轴向应变为ε时,基片伸长量
ΔL=aε
(8)
弹簧上产生的拉力为
F=Ebhε
(9)
理论上,上部单元产生的总位移为
(10)
式中:a,b,h分别为基片的长度、宽度和厚度;E为基片弹性模量;K1为弹簧刚度系数。
2 传感器标定试验
2.1 试验材料
本文中使用的wFBG的栅区长度为10 mm,先确定竖直段的最小高度,在一定高度下,竖直段越短,其放大系数越大,但为了保证弹簧的变形空间,故存在最小高度和上部宽度,取竖直段高度L1=4 mm,上部初始宽度L=28 mm。由于在结构比选过程中已选定弹簧,长度为12 mm,故基片长度为16 mm,由式(3)、(4)按照理论弱光栅点可感测4 000 με为基准,设计选定基片材料为PLA材质,基片宽度、高度分别为1.5 mm、1 mm。
传感器材料及尺寸:2个弱光栅阵列中心波长为1 540 nm和1 541 nm,反射率小于0.1%,直径为∅0.5 mm;主体选用钢精密加工工艺制作,主体结构尺寸为:L1=4 mm,L2=6.257 mm,L3=13.13 mm,L4=355.134 mm,初始状态θ1=48°、θ2=26°,K1=1 441 N/m,长度12 mm;wFBG粘贴基片的a=16 mm,b=1.5 mm,h=1 mm;PLA材质的E=3 600 MPa,基片为3D打印。
其他实验设备及材料:宜昌睿传光电技术有限公司RS-HFBGA-04超弱光栅阵列分析仪及502胶等,解调仪可解调波长范围为1 528~1 568 nm,测量速度为1 Hz,波长分辨率小于1 pm。
2.2 试验过程
试验开始前,首先将弱光栅进行一定程度预拉伸,用502胶水将弱光栅和穿过光栅的松套管粘贴于基片长轴线中心位置,静置2 h,使粘胶达到最大粘结强度;再将弹簧连接基片一端预留孔,这样形成的上部结构两端分别与传感器主体结构顶部连接,结构组装完毕。
试验展开时,将一块表面光滑的大理石固定于试验平台上,再将传感器左下端支座用螺钉固定在大理石上,右端可单向自由活动,同时利用刻度尺作为传感器位移大小判定依据,将刻度尺0刻度位置水平置于传感器右端初始位置。
试验过程中,室内环境温度基本恒定且测试时间较短,移动传感器右端水平向右,移动步长为20 mm,稳定时间5 min,在每个位移点记录下弱光栅中心波长的读数,直到位移量达到160 mm,共进行3次标定试验,标定测试结果如图6所示。
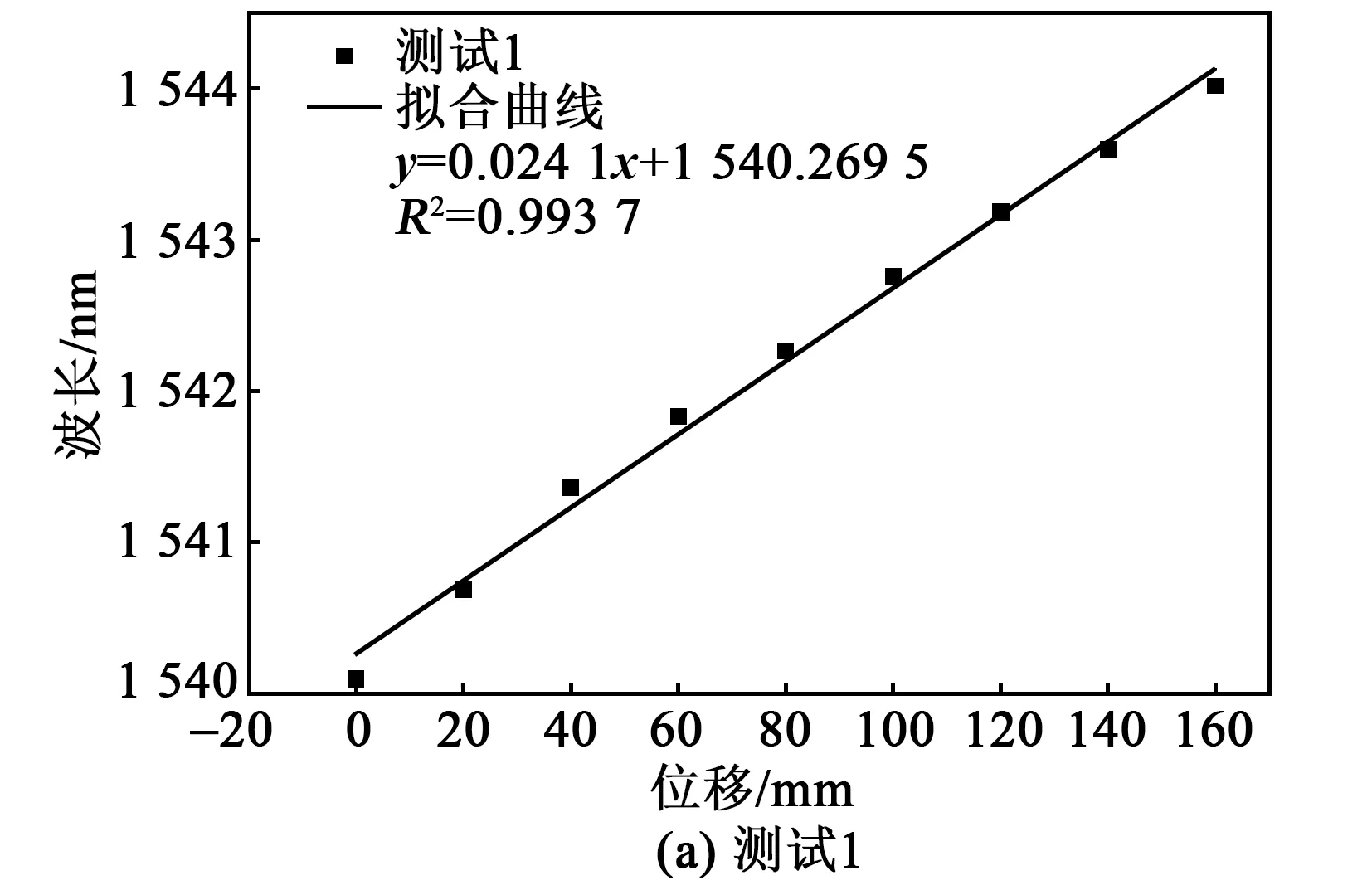
图6 标定测试结果
2.3 结果分析
测试过程中,由于测试时间较短且室温基本不变,弱光栅2上的中心波长基本恒定,可忽略温度对标定实验结构应变中的影响。由图6可看出,弱光纤光栅1的中心波长和传感器测量位移呈线性关系,拟合曲线相关系数R2均不小于0.993 7,线性度良好,传感器最小灵敏度系数为24.1 pm/mm,测量范围达到16 cm。其平均位移和波长之间的关系为
y=0.024 4x+1 540.208 3
(11)
由式(11)可知,该位移传感器的灵敏度系数为24.4 pm/mm。综上所述,该传感器具有较大的量程及良好的灵敏度。
3 传感器模型试验
由于环境因素的不断变化,结构体位移时常出现往复变化的特点,位移量不确定。因此,为进一步测试传感器对随机位移的监测性能,开展了裂缝开度往复试验。
试验展开时,将传感器左下端支座用螺钉固定在混凝土试件上,另外一端固定在最小定位精度为0.02 mm且测量行程可达400 mm的位移调节平台上,传感器右下端可随着调节平台移动而协调变形,如图7所示。在位移调节平台上随机调节位移量,记录此时真实位移值,并在每个位移点记录下弱光栅中心波长稳定后的读数,再结合传感器标定试验结果计算得出随机位移计算值,真实值和计算值对比结果及相对误差分析如图8、9所示。由于测试过程一直处于室内,温度变化极小,实验持续时间较短,弱光栅2中的中心波长基本保持不变,因此,弱光栅1的中心波长漂移由结构本身拉伸应变引起。
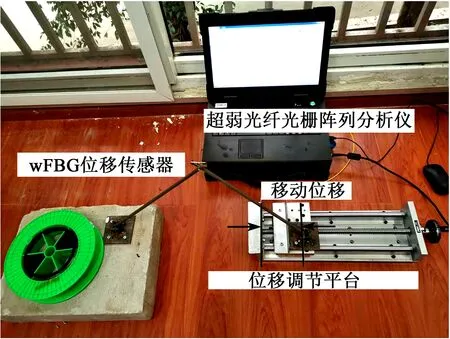
图7 传感器模型试验示意图

图8 裂缝监测过程模拟试验结果
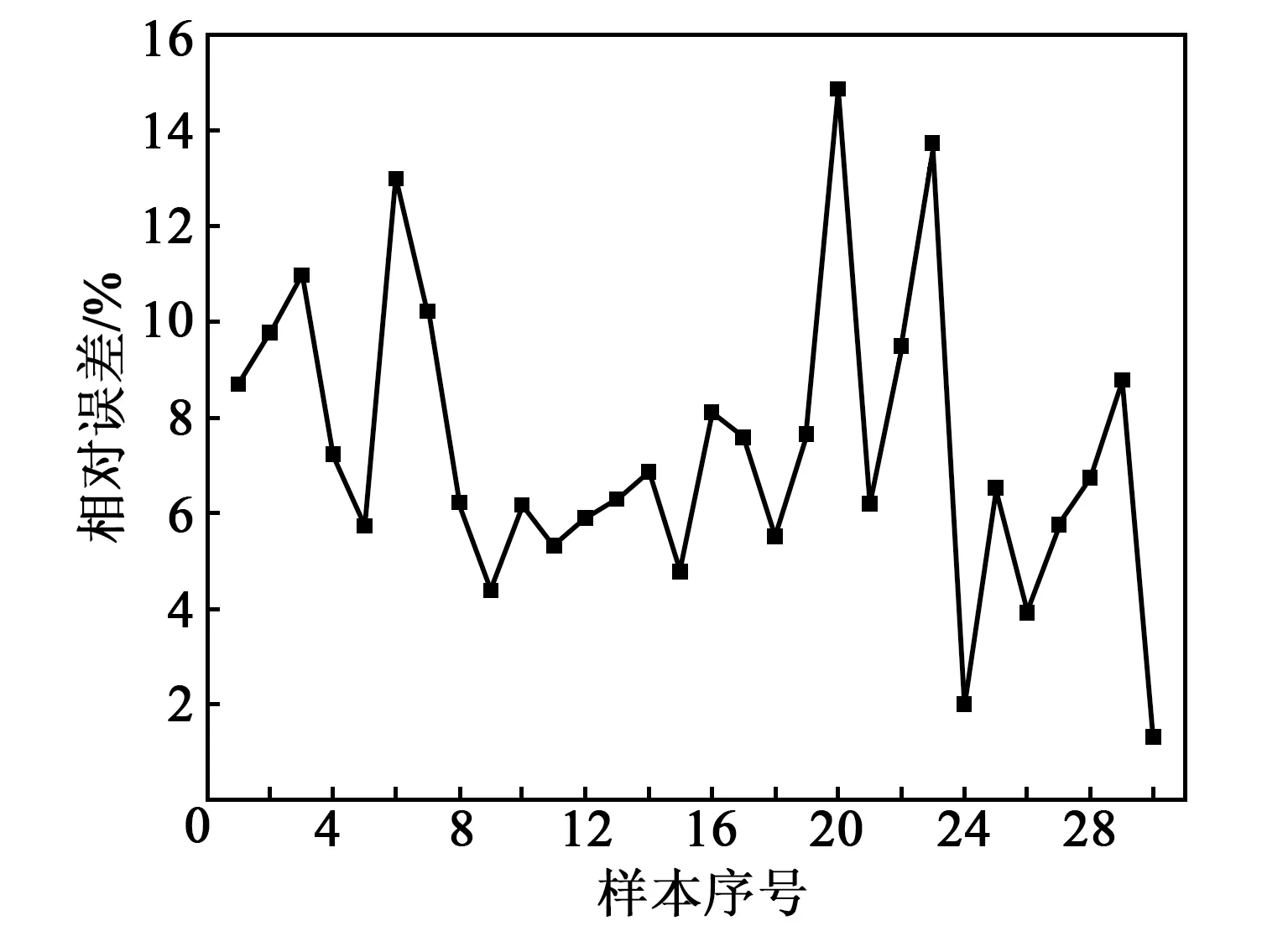
图9 裂缝监测过程模拟试验误差分析
由图8、9可知,裂缝随机开度模拟过程中,30个数据样本基本能反映出裂缝变化的真实情况,传感器真实值与参考值基本一致,相对误差较小,基本都保持在10%以内,满足实际工程监测要求。相对误差最大发生在第20号样本处,最小发生在第30号样本处,相对误差仅为1.3%。
4 结论
本文基于杠杆原理和弱光栅传感技术,通过多种结构形式的比选,设计了一种构造简单、传力稳定,且具有大量程,高精度、高灵敏度的新型弱光栅位移传感器。通过理论推导以及标定和性能试验,得到如下结论:
1) X型带上外拐加直立段(X-SWGZL)是最优传感结构,在结构高度和传感单元长度相同的情况下,位移放大倍数和量程均为最大。
2) 依据标定试验结果,设计的弱光栅位移传感器具有良好的线性度,较宽的测量范围达到160 mm,较高的灵敏度为24.1 pm/mm。
3) 裂缝随机模拟试验表明,本文的传感器可有效确定测量误差小于10%的位移开度变化。
根据实际测量要求,通过调整传感结构的测量臂尺寸比例来改变传感器的位移放大倍数和精度。由于2个弱光栅阵列的布设,弱光栅2穿过固定于基片上的松套管不受拉伸变形,可额外测量环境温度。因此,传感器本身可测量温度和变形。进一步实验可考虑通过3D打印技术一次成型整个传感装置,使弱光栅完美嵌入到结构中,既可使传感器性能稳定,又可提高其野外使用耐久性,同时应该开展传感器的串联准分布式监测,以较好地发挥弱光栅的复用能力,以便在现场工作中的长期监测应用。
猜你喜欢
表面技术(2022年3期)2022-03-31 05:48:24
军民两用技术与产品(2021年7期)2021-10-13 08:12:10
煤气与热力(2021年4期)2021-06-09 06:17:06
石油化工自动化(2018年5期)2018-11-14 02:34:16
高师理科学刊(2016年8期)2016-06-15 20:27:46
通信电源技术(2016年1期)2016-04-16 04:57:35
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:41
陶瓷学报(2015年4期)2015-12-17 12:45:02
哈尔滨理工大学学报(2014年3期)2015-01-04 13:31:57
物理与工程(2014年4期)2014-02-27 11:23:08