基于GSA-SVR算法的MEMS温度漂移补偿方法
2023-09-20 12:38:38梅方玉顾生闯仇海涛
压电与声光 2023年4期
梅方玉,顾生闯,仇海涛
(1.北京信息科技大学 高动态导航技术北京市重点实验室,北京 100192;2.北京航天控制仪器研究所,北京 100070)
0 引言
微机电系统(MEMS)惯性器件因具有体积小,价格低,功耗低及可靠性高等优点,被广泛应用于导航与控制领域。MEMS陀螺和MEMS加速度计是MEMS惯性导航系统的核心部件,其性能优劣直接影响了惯导系统的精度,零偏是主要误差源之一。MEMS惯性器件零偏极易受环境温度变化的影响,导致传感器输出较大的温度漂移误差,降低了导航精度。因此,对MEMS零偏的温度补偿很重要。
通过温度模型辨识,建立惯导的温度漂移模型,再通过软件算法补偿零偏是工程中常用的手段。算法补偿成本较低,操作较简单,更具实用性。多项式模型和分段模型已广泛应用于惯性传感器漂移的温度模型辨识[1]。文献[2]提出了一种基于全温域MEMS惯导标定方法,利用MEMS陀螺和MEMS 加速度计在不同温度和温度变化速率下标定获得的零偏,通过多项式拟合方法建立仪表的温度补偿模型,但多项式拟合对非线性数据难以准确建模。文献[3]提出了将粒子群算法应用在MEMS的温度建模中,采用优化的混合算法对网络进行训练,并与多项式拟合方法和径向基函数(RBF)神经网络方法做对比,证明了方案的合理性。神经网络具有以任意期望精度逼近非线性函数的优点,可以建立任意所需精度的漂移模型[4]。然而传统的神经网络算法需要大量的测试数据,增加了标定时间和成本。
很多研究只考虑MEMS在稳定工作状态下的温度漂移补偿,不考虑启动工作阶段的温度补偿,而在启动工作阶段,外界温度及内部发热器件产生的温度均对零偏产生影响[5],因此,对不同工作阶段分别进行补偿可有效地提高仪表精度。
本文提出了一种基于引力搜索算法(GSA)和支持向量回归(SVR)[6]的MEMS零偏温漂补偿新方法。根据MEMS的特点分别对启动状态和稳定工作状态进行建模。SVR算法对小样本有较好的泛化能力,通过引入核函数可避免过拟合问题,有效地解决了非线性问题。由于SVR的补偿精度受其参数选择的影响较大,因此,采用GSA优化训练参数,获得最佳估计和性能。
1 MEMS仪表温度漂移机理分析
1.1 MEMS陀螺
MEMS陀螺的基本原理是将传统陀螺的转动转化为振动,然后通过输入角速率引起的科氏力耦合至谐振轴的正交轴上,通常也被称为检测轴,然后通过测量轴的位移得到与科氏力成正比的输出信号,从而得到输入角速率的大小。
温度对MEMS惯性器件的影响,主要是一种间接作用,即温度影响材料的性能变化导致结构参数和电参数发生变化,如机械结构变形、弹性模量和残余应力变化等现象都会导致陀螺仪产生温度漂移误差。微机械陀螺的主要构成材料为硅,该材料对温度特性非常敏感。同时,其他电路元件特性也会随环境温度的变化对 MEMS 陀螺零偏产生影响。系统刚度随着材料弹性模量的变化而发生变化,进一步改变陀螺仪谐振频率,陀螺仪输出产生漂移[7]。材料弹性模量随温度变化近似成线性关系:
E(T)=E0-E0κET(T-T0)
(1)
式中:E(T)是温度为T时硅材料的弹性模量;T0为常温;E0为常温下的弹性模量;κET=(25~75)×10-6为硅材料弹性模量温度变化系数,一般取κET=50×10-6。通过分析MEMS陀螺仪的工作机理,陀螺谐振频率与温度的关系可线性近似为
ωn(T)=ωn(T0)[1-1/2κET(T-T0)]
(2)
式中ωn(T)是温度为T时陀螺谐振频率。
温度通过影响MEMS陀螺谐振频率对陀螺驱动及检测模态产生影响,进一步影响陀螺信号的输出,从而引起陀螺零位输出的漂移。因此,通过分析陀螺仪输出,建立正确的温度误差模型并对陀螺仪输出进行补偿很重要。
MEMS陀螺仪的工作阶段在实际应用中可分为两种状态:
1) 上电后20 min内。MEMS陀螺刚启动时,内部谐振还未达到稳定,电路系统和传感器还处于预热状态,温度变化主要来源于传感器内部元器件自身发热。
2) 稳定工作阶段。内部元器件的特性主要受外部环境温度的影响。
为了提高补偿模型在复杂环境下的适应性,同时提高MEMS陀螺仪的温漂补偿精度,本文分别对这两个阶段进行建模。
1.2 MEMS加速度计
MEMS加速度计由质量块、弹性件、阻尼元件和限位件等组成。与MEMS陀螺仪机理分析类似,对于MEMS加速度计,温度变化将导致加表机械结构尺寸、材料弹性模量及介质介电常数的变化,从而引起敏感电容的变化,造成输出误差[8]。当有加速度计输入时,电容间距产生变化,致使电容量差值发生变化,即:
(3)
式中:C0为无输入状态时极板间电容;d0为无输入状态时极板与质量块间距离;m为敏感质量块质量;a为输出加速度。
在实际应用中,MEMS加速度计与MEMS陀螺相似,也分为启动阶段和稳定阶段两种状态,因此也需要对MEMS加速度计两个阶段分别进行建模。
2 GSA-SVR算法
由于MEMS的原始输出中含有较大的随机噪声,对模型训练造成较大的干扰,因此,在训练前使用小波变换[9]对输出信号进行去噪。根据MEMS的上电时间,将其工作状态分为启动状态和稳定状态,分别对陀螺和加速度计的零偏进行建模,阈值根据经验设置为900 s。为了消除不同数据间的量纲,方便数据比较和共同处理,需要将MEMS输出归一化为训练样本,通过SVR训练温度漂移误差模型,消除温度引起的误差,最终提高导航精度。SVR参数的选取对建模的精度影响较大,所以有必要采用元启发式算法来实现SVR参数的优化,提高回归的精度。与其他一些元启发式算法相比,GSA可以在非线性信号领域取得更高的性能,易于实现,同时具有收敛速度快,计算成本低及收敛速度方便控制等优点。
2.1 SVR算法
SVR是一种用于回归的监督学习方法,可以最大限度地实现高精度预测,避免过拟合。传统的神经网络通常需要大量的数据,容易过拟合。SVR实现了结构风险最小化(SRM)的原则,使用核函数将数据变换到更高维的特征空间,使得进行线性分离成为可能,在小样本的情况下处理非线性问题可以达到更高的准确率[6]。因此,SVR算法适合建立MEMS零偏的非线性温度模型,使用有限的试验数据减小拟合误差,同时具有很强的泛化能力。
给定训练样本集(xi,yi),i=1,2,…,N,SVR线性回归函数为
f(x)=w·x+b
(4)
式中:w为决定超平面方向的法向量;b为超平面到原点的位移量。
依据结构风险最小化原则得到如下目标函数用来计算参数w和b为
(5)
式中:C为惩罚因子;ζ,ζ*分别为衡量上、下界误差的松弛变量。
利用拉格朗日函数法将式(5)转化为二次规划问题:
(6)
约束条件:
(7)
求解上述问题可以得到拉格朗日乘子a和a*,从而得到:
(8)
式中:ε为预先指定的最大误差;S为支持向量的个数。
由于传统的SVR算法只适用于线性回归,通过引入核函数可以将非线性问题转化为线性问题。选择径向基函数[3]作为核函数:
(9)
式中σ为核函数的内核宽度。对应的二次规划问题:
(10)
综上所述,MEMS零偏温度漂移的非线性回归函数为
(11)
作为SVR的核心,核函数参数σ和惩罚因子C对SVR的精度影响较大。C是一种用于避免过拟合的参数,如果参数较大,则模型更注重减少复杂度,导致欠拟合,而参数过小,模型更注重减少误差,导致过拟合。但是惩罚因子设置太高,模型会倾向于选择较少的特征或样本,同样会导致过拟合。核函数参数σ决定了映射到特征空间后的分布,影响样本训练的速度和精度[10]。因此,使用GSA算法来实现C和σ的优化。
2.2 GSA算法
GSA是一种基于物理学的优化技术,灵感来源于牛顿的万有引力定律。根据此算法,每个搜索代理都被视为一个物体,其质量与适应度成正比。所有物体间都存在引力,这个力会导致所有物体向最优解移动[11]。SVR算法的参数C和σ的优化流程可以分为以下阶段:
1) 初始化空间。根据随机均匀分布初始化空间中的粒子及经验值,设置粒子数n=30,粒子的运动范围(C和σ的取值范围)为{C,σ|C∈(0,1 000),σ∈(0,1 000)}。
2) 确定适应度(Fitness)函数M(t)。粒子的位置表示需要确定的SVR参数,选择SVR算法的回归残差作为目标函数,以表示当前位置的适应度函数。
3) 计算粒子的惯性质量F(t)。第i个粒子的惯性质量与其适应度成正比,满足如下关系:
(12)
(13)
4) 更新引力常数G(t)。设置迭代次数d=30,初始引力常数G0=500,则引力常数为
(14)
5) 更新加速度ai(t)。第i个粒子的引力值Ni(t)为
(15)
式中:Rij为第i个和第j个粒子之间的欧氏距离;λ为相当小的常数;x(t)为粒子位置。则第i个粒子的加速度为
(16)
6) 更新速度和位置。下一时刻的粒子速度和位置为
vi(t+1)=vi(t)+ai(t+1)
(17)
xi(t+1)=xi(t)+vi(t+1)
(18)
7) 迭代计算步骤2)~6),直到满足停止条件。某次迭代过程如图1所示。粒子的适应度值越小,颜色越深。全局粒子朝着颜色最深的粒子移动,随着迭代次数增加,其他粒子集中于颜色最深的粒子附近,该粒子的位置表示GSA寻优的结果。

图1 GSA-SVR算法迭代过程示意图
3 试验结果与分析
将MEMS惯导放置在与振动隔离地基固连的温箱(型号为银河 HL7025PG)内,整个试验过程保持静止。MEMS惯导系统由3个陀螺、3个加速度计及信号处理系统组成。MEMS陀螺的零偏稳定性约为1 (°)/h,而加速度计的零偏稳定性约为10-3g。MEMS采样时间为2 ms,数据离线处理。为了满足MEMS体积和质量的高要求,其内部结构十分紧凑,带来了复杂的热环境。本文对MEMS在启动工作阶段和稳定工作阶段分别进行建模,并进行温度漂移补偿。最后对比了几种不同温度建模方法来验证GSA-SVR方法的有效性。
3.1 启动工作阶段
试验在22 ℃恒温环境中重复3次,每次试验前MEMS断电冷却2 h。以加速度计为例进行分析,X轴加速度计在启动工作阶段的温度和温度变化率如图2所示。由图可看出,在启动工作阶段中温度一直在升高,温度变化率先升高后降低,15 s达到峰值,820 s后稳定。加速度计的输出信号和温度如图3所示。加速度计输出一直在减小,820 s后也趋于稳定。

图2 启动工作阶段X轴加速度计温度和温度变化率
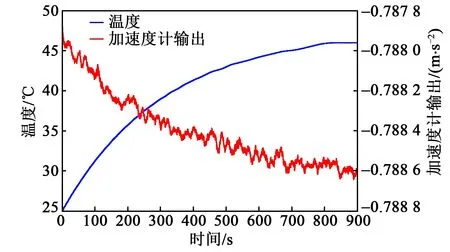
图3 启动工作阶段X轴加速度计温度和输出
启动工作阶段中每组试验持续0.5 h。前两组数据为训练集,使用GSA-SVR算法训练以温度为自变量的MEMS零偏温度漂移模型。最后一组数据是用来验证算法有效性的测试集。启动工作阶段中的最佳SVR参数如表1所示。X轴加速度计的补偿效果如图4所示。前900 s输出的标准差从1.778 mg减小为0.213 mg。三轴加速度计补偿结果如表2所示,其标准差降低了约80%。

表1 启动工作阶段三轴加速度计零偏的SVR优化参数

表2 启动工作阶段三轴加速度计输出的标准差
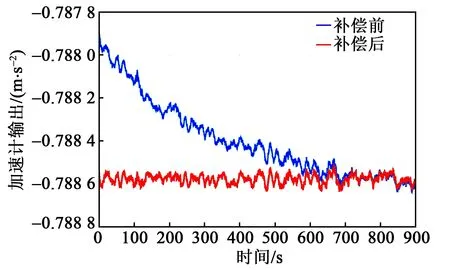
图4 启动工作阶段X轴加速度计原始输出和补偿后输出
3.2 稳定工作阶段
温箱温度控制在60 ℃并保持1 h,MEMS通电20 min后开始记录数据。按照-30 ℃/h温变率降温至-40 ℃并保持2 h,然后按照30 ℃/h温变率升温至60 ℃。试验重复3次,每次试验前MEMS冷却2 h。
图5为稳定工作阶段变温过程中六轴仪表的温度。由图可看出,加速度计和陀螺的温度存在一定差异。这是由于三轴加速度计集成在一块芯片上,体积更小,结构更紧凑。而三轴陀螺分布在不同面的电路板上,位置相对分散。因此,变温过程中,加速度计温度略高于陀螺。此外,六轴仪表的初始温度和结束温度略高于温箱设定温度,说明仪表不仅受外界环境温度的影响,也受自身产生的温度场的影响。因此,本文有必要将其工作状态分为启动阶段和稳定阶段。
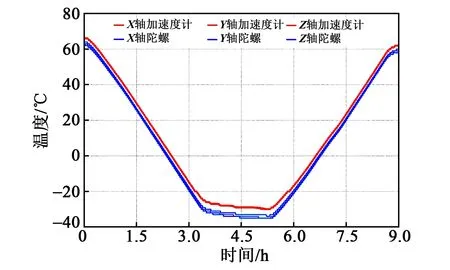
图5 稳定工作阶段变温过程中六轴仪表的温度
在温箱工作时,MEMS输出中含有大量的噪声信号,使用小波变换对输出进行预处理,以更好地体现温度的影响,降噪后的信号如图6所示。由图可看出,变温试验中,MEMS加表输出最大变化3 mg,而MEMS陀螺输出最大变化10 (°)/h。相对于仪表的自身精度,由温度引起的零偏漂移会引起较大的测量误差,进而制约导航精度,因此,对MEMS进行高精度温度补偿至关重要。
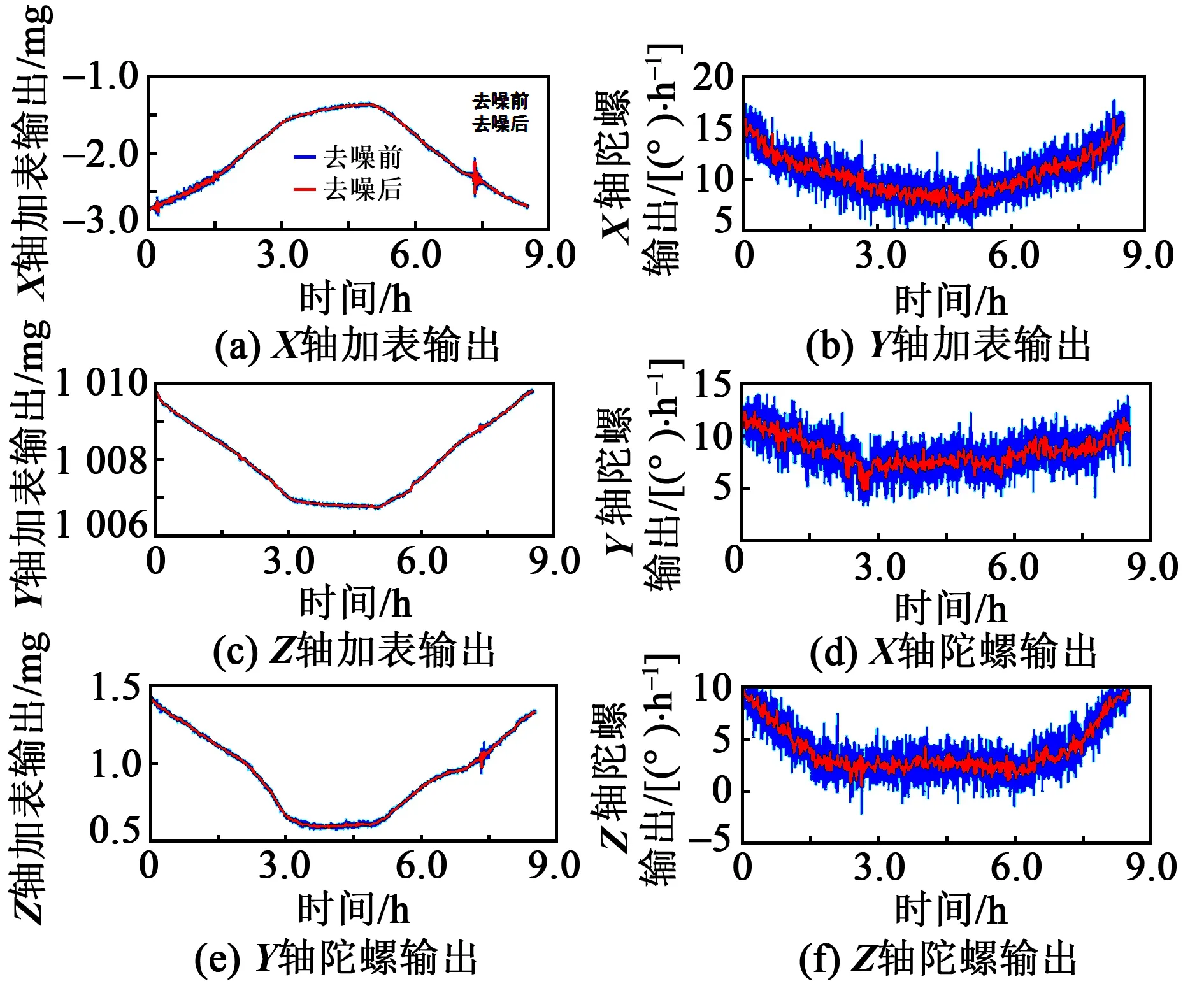
图6 稳定工作阶段变温过程中六轴仪表的输出
稳定工作阶段试验中,每组试验持续9 h。前两组数据为训练集,采用GSA-SVR算法以六轴仪表的温度为自变量训练稳定工作阶段的零偏温度模型。最后一组数据是用来验证算法有效性的测试集。稳定工作阶段下最优SVR参数如表3所示。六轴仪表经补偿后的输出误差如图7所示。由图可看出补偿效果明显,MEMS的零偏温度漂移分量基本消除。表4为稳定工作阶段六轴MEMS输出的标准差。由表可看出,加速度计的输出标准差降低了90%,陀螺的输出标准差降低了85%。
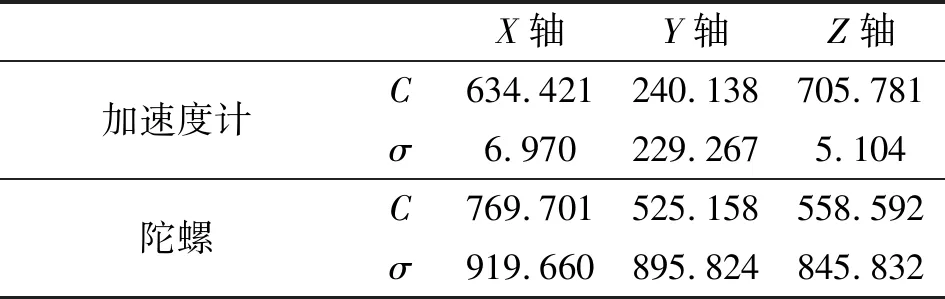
表3 稳定工作阶段六轴MEMS零偏的SVR优化参数

表4 稳定工作阶段六轴MEMS输出的标准差
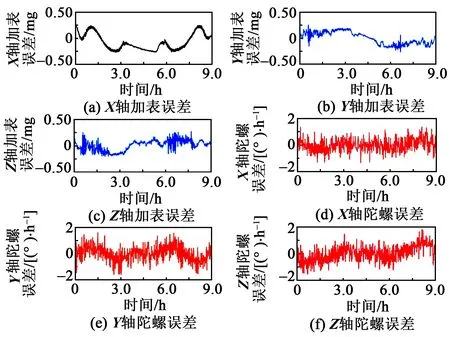
图7 补偿后稳定工作阶段变温过程中六轴仪表输出误差
3.3 不同补偿方法对比
利用MEMS惯导稳定工作阶段的数据,选择最小二乘法(LSM)、自适应回归(AR)及SVR等温度建模方法与本文所述GSA-SVR方法进行对比,表5为不同方法补偿后的六轴MEMS仪表输出的标准差。由表可以看出,GSA-SVR方法显著提高了补偿精度,零偏漂移补偿效果远优于传统的LSM和AR方法。此外,与传统的SVR相比,GSA-SVR将MEMS加速度计和陀螺的输出标准差分别降低了6%和10%。
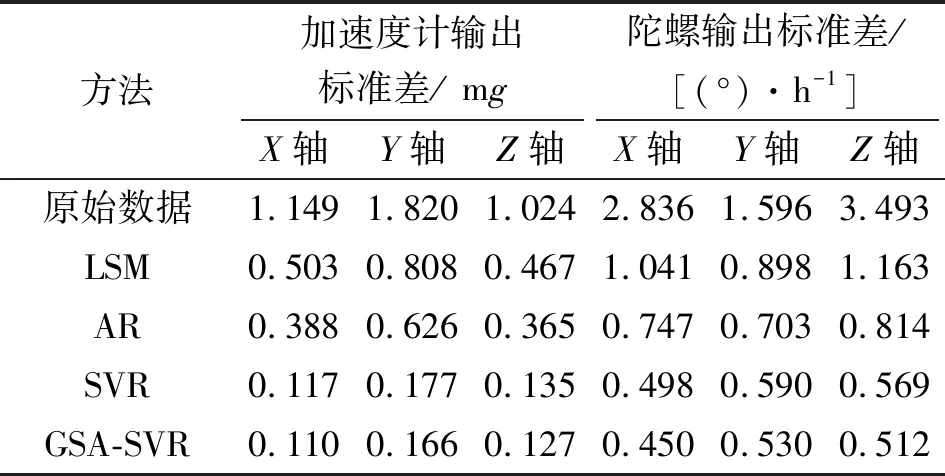
表5 不同补偿方法MEMS仪表输出标准差对比
4 结束语
本文提出了一种新的基于GSA-SVR的MEMS零偏温度漂移补偿方法。通过分别对陀螺和加速度计的不同工作状态进行建模,充分利用六轴仪表提供的温度信息获取MEMS的零偏与温度变化的关系。实验结果验证了GSA-SVR方法的准确性和实用性,与补偿前相比,使用GSA-SVR方法建模,补偿后MEMS加速度计和陀螺的输出标准差分别降低了90%和85%。此外,与传统SVR相比,GSA-SVR将MEMS加速度计和陀螺输出的标准差分别降低了6%和10%。
猜你喜欢
中国特种设备安全(2021年5期)2021-11-06 05:09:08
当代医药论丛(2021年3期)2021-03-17 07:03:12
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
光学精密工程(2016年5期)2016-11-07 09:06:41
赤峰学院学报·自然科学版(2015年15期)2015-03-21 00:30:56
导航定位与授时(2014年2期)2014-04-27 13:41:11