薄壁易碎圆柱内壁工件的内撑式机械手抓取接触-碰撞仿真与实验研究
2023-09-19 06:46王良文孔阳光王若澜张志刚刘旭玲李林峰
中国机械工程 2023年17期
王良文 孔阳光 王若澜 张志刚 刘旭玲 李林峰
1.郑州轻工业大学机电工程学院,郑州,450002
2.郑州轻工业大学国际教育学院,郑州,450002
3.河南省机械装备智能制造重点实验室,郑州,450002
0 引言
脆性材料的抗动载荷和抗冲击的能力均较差,抗压能力远高于抗拉能力,具有易碎特性,而典型的脆性材料(如玻璃、陶瓷等)应用非常广泛。在食品包装生产、轻工产品的加工以及各类物流生产线上,采用机械手完成对薄壁易碎工件的抓取与作业,具有很大的应用需求[1-2]。
在采用机械手实施对易碎件的作业过程中,易碎件的容许强度限制了机械手与易碎工件之间的接触应力。研发适用于薄壁易碎工件抓取与转运作业机器人的末端执行器存在较大的技术瓶颈,比如:高速抓取过程中,抓取手指与薄壁易碎件之间的碰触冲击可能导致易碎件的破损;而在装配易碎工件的过程中,机械手对易碎件采用“硬”的施力模式,易造成易碎件破损等问题。综上,对薄壁易碎工件作业机械手操作过程的接触碰撞进行分析与仿真具有重要意义。
世界上已有许多公司研发了适用于生产线的上下料机械手系统。如针对汽车风窗玻璃安装过程,张永春等[3]设计了自动上下料系统。机械手系统实现特定功能作业的关键部件是末端执行器[4],而机械手手指设计非常关键。许多科研人员对机械手的抓取进行了探讨,如SINTOV等[5]研究了侧面抓取的策略,VINCENT等[6]改进设计的机器人抓取器可以抓取大而薄的物体。
研究机械手抓取易碎件的过程,开展抓取过程的冲击仿真,对完善机械手的结构十分关键。对易碎件作业过程开展类似的研究包含:RATHOD等[7]对陶瓷-金属复合材料的弹道性能进行了数值分析,胡文进等[8]研究了不同速度下玻璃钢船与冰的碰撞情况。但在现有的研究中,还较少涉及在采用机械手抓取薄壁易碎工件的作业过程中开展接触碰触的研究。
在本研究中,针对工业生产中对薄壁易碎件的抓取转运与装配需求,提出了一种具有指掌协同特征、适用于薄壁脆性圆柱内壁工件作业的内撑式机械手构型。为了探索机械手抓取过程的接触-碰撞规律,采用HyperMesh等软件集成建模的方法,建立了机械手指端零部件的有限元模型,计算得到了易碎件接触碰撞过程中的应力等变化规律。
由于有限元模型设计复杂,且存在仿真运行时间较长、软件集成难度大等问题[9],所以,为研究在不同壁厚、速度条件下的应力变化,以仿真计算获得的机械手抓取参数与抓取作业时接触应力的变化规律为基础,开展了不同壁厚、速度条件下应力大小的预测研究。
针对建立预测模型,国内外已开展了相关研究:王文竹等[10]通过引入Kriging代理模型,对鼓式制动器稳定性进行了优化设计;DENIMAL等[11]利用复模态分析对制动噪声进行了预测;HAWCHAR等[12]利用主成分分析和多项式展开来逼近极限状态面;MEDINA-GONZALEZ等[13]提出了一种基于Kriging元模型的数据驱动决策框架方法。本文的研究中,通过建立Kriging代理模型,计算得到了不同壁厚、抓取速度条件下接触应力的预测值,研究过程为改良手指结构及确定作业过程参数建立了基础。
1 机械手总体结构
本文针对特定生产线上的上料与装配机械手进行研究,其作业过程如图1所示[14]。将专用的易碎环状工件(图1a)转运在模具上方(图1b),并装配在模腔的凸模上。
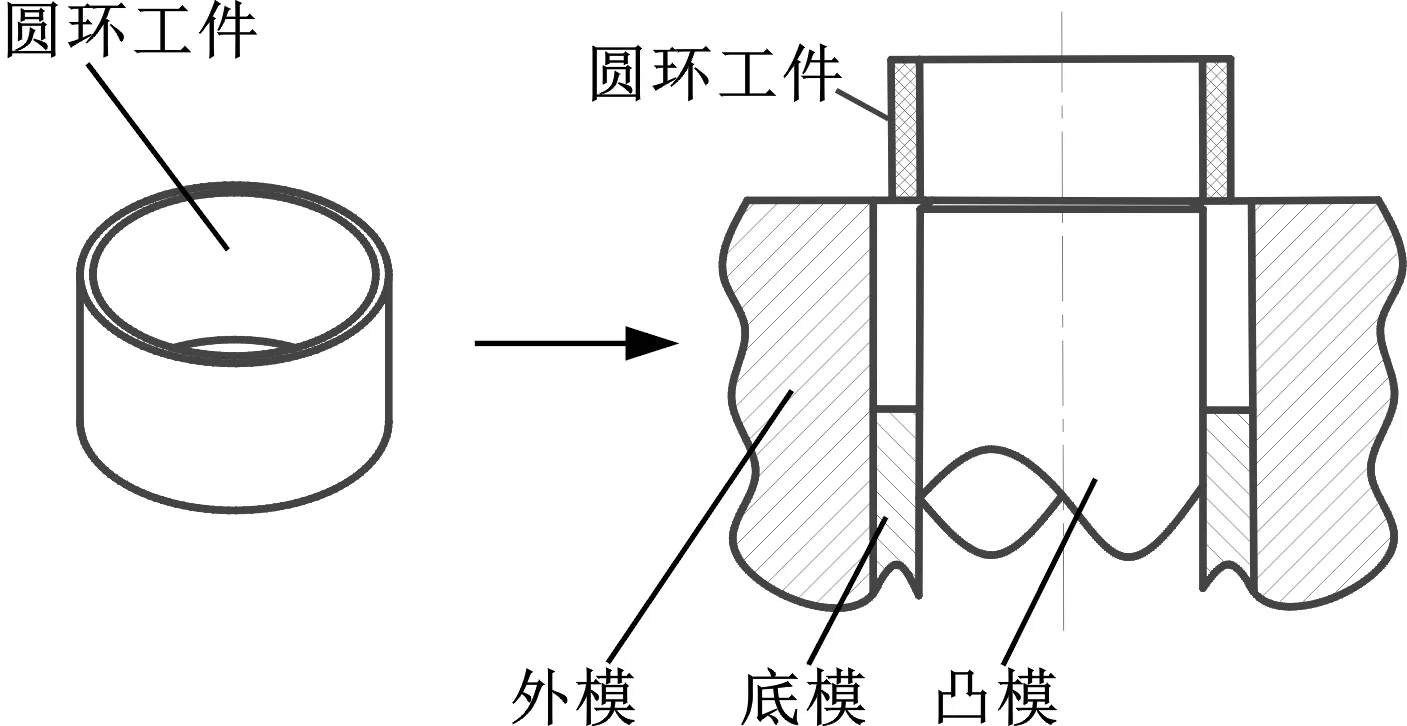
(a)易碎环状工件 (b)成形模具
当采用机械手将被夹持的工件安装在模腔的凸模上时,需要在成形模的中心凸模外壁与外模内壁之间的狭小缝隙间完成工件在凸模上的套装作业。综合考虑作业特征和技术要求,采用一种手指系统回缩、手掌下压的作业模式进行研究。
本设计中,将内撑式三手指嵌套在桶状手掌的内圆柱面内,通过指掌联合完成工件在狭窄空间内的下压装配作业。并设置导向杆结构及弹性结构,保证机械手的手指在完成下压装配后能够平稳地回复原位[15-16],相关结构如图2所示。综合机械手的结构功能要求,将机械手安装在可实现水平和垂直运动的模组上,从而形成机械手系统的构型。
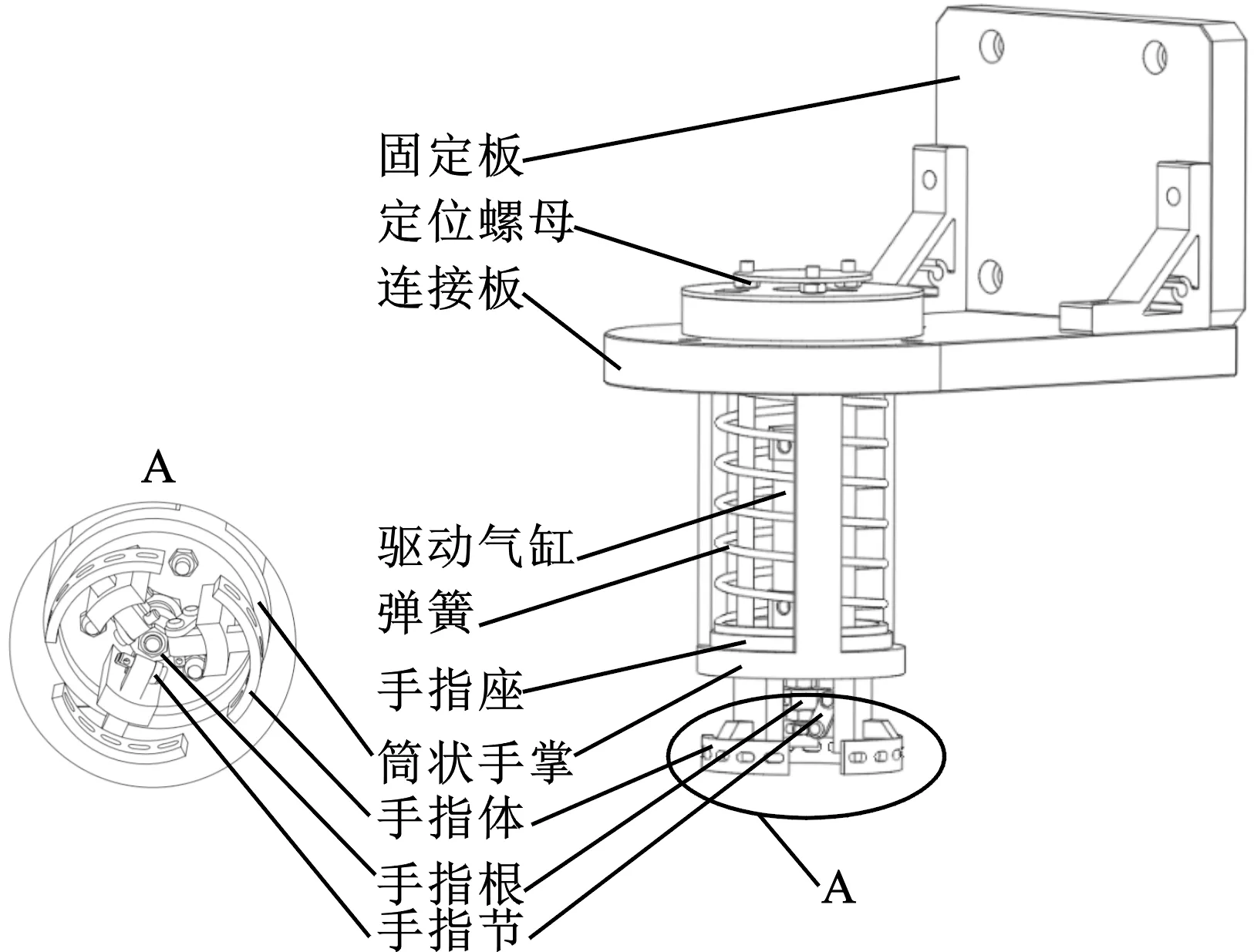
图2 实现内撑抓取的机械手结构
2 机械手抓取易碎件接触冲击仿真相关技术
2.1 集成建模仿真技术关键
在本研究中,对机械手指碰撞易碎件的过程运用SolidWorks、HyperMesh、LS-PrePost等软件进行集成建模,首先通过SolidWorks建立三维实体模型,导出IGS文件,并将其导入到HyperMesh中进行网格划分,生成K文件,再导入到LS-PrePost后处理器中进行后处理设置,其中包括定义有限元模型如下多项工作:材料类型、单元类型、沙漏能、PART、接触方式、施加载荷、边界条件设置、输出步长与数据输出频率,保存K文件,并导入到manager软件中进行计算。
2.2 机械手抓取易碎件的有限元模型构建
典型机械手气缸连接结构如图3所示,由气缸-活塞杆组成机械手的驱动系统,气缸输出的直线伸缩运动经过手指根(气缸接头)、手指节(连杆)、手指体的传递后转化为机械手的张开与收缩动作,以此来实现易碎件的抓取和放置作业。

图3 机械手气缸连接结构
基于SolidWorks、HyperMesh、LS-PrePost集成建模,建立的内撑式抓取机械手指冲击易碎件的有限元模型如图4所示。其中内撑式机械手采用刚性手指与软性手指结合的几何结构,并与易碎件形成刚-柔-脆介质传递模型,机械手指体材料为铝合金,机械手指表面覆盖有橡胶垫,且橡胶垫粘合在机械手指表面。

图4 机械手指冲击易碎件的有限元模型
2.3 脆性材料力学性能
一般而言,脆性材料的抗压能力很强,但其抗拉伸能力很弱,由于从自由表面反射的压缩波而产生的拉伸波会导致大量碎片产生[17],故脆性材料的抗压和剪切强度远高于其抗拉强度。最大拉应力理论(第一强度理论)指出,引起受拉脆性材料断裂的主要原因是最大拉应力,无论处于何种应力情况,最大拉应力达到某一极限值时材料就会发生断裂。即单向拉伸应力σ1达到单向拉伸应力状态下的极限强度σb时会发生断裂情况,断裂条件为:最大拉应力强度σmax大于极限强度(即σ1=σmax≥σb)。
冲击应力是瞬间产生的。材料受到冲击下,当应力达到断裂强度时即可对材料造成损伤,即当σ1=σb时,以此为临界点,求出临界冲击应力。在本课题的研究中,以此为评价准则。
3 内撑式机械手指抓取易碎件作业碰撞仿真分析
为了研究刚-柔-脆介质间的接触碰撞过程,以及手指系统采用不同参数时与易碎件接触的应力变化,本研究选用玻璃这种常见的脆性材料为代表进行仿真。内撑式机械手的待抓易碎件为玻璃环,内半径为27.75 mm,外半径为30.75 mm,环的深度为35 mm。模型的基本参数如下:机械手指抓取冲击的基本速度为1 mm/ms,机械手指指端覆盖的橡胶厚度为1 mm,机械手指上表面与易碎件上表面的位置齐平,手指与环边的初始距离为3 mm。相关材料参数[18-20]如表1和表2所示。
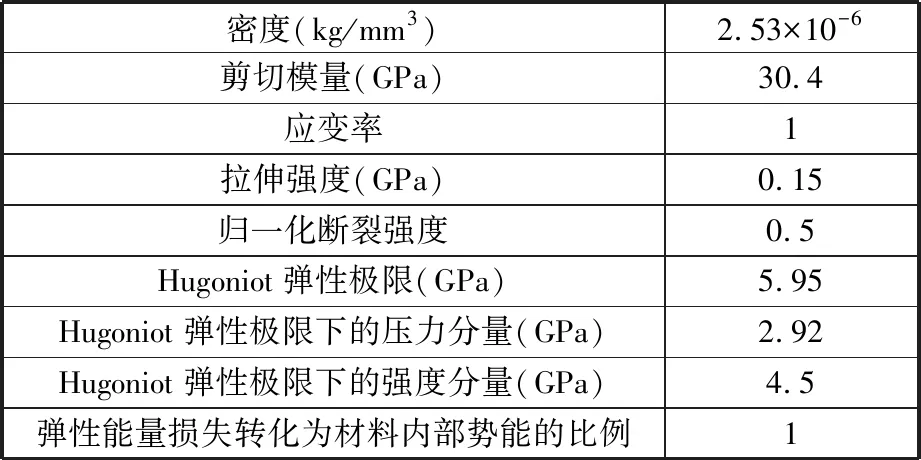
表1 玻璃的材料参数

表2 手指体及手指垫材料参数
仿真分析中,笔者分别研究了冲击速度、易碎件厚度、施加加速度大小对易碎件所受应力大小的影响,进而获得了优选的机械手作业参数。
3.1 冲击速度的变化
对于由基本参数建立的有限元模型,选择改变冲击速度形成第1组(1~5号)有限元模型,选择冲击速度分别为0.5 mm/ms、1 mm/ms、1.5 mm/ms、2 mm/ms、2.5 mm/ms。图5为五个模型在碰撞过程的应力云图,其中,X轴正方向为手指抓取冲击垂直于工件表面的方向,Y轴正方向为沿工件外表面向上的方向。该组工件所受的最大主应力(principal-max)以及在X、Y、XY方向上的最大应力如表3所示。上述应力的变化曲线见图6。显然冲击速度与最大应力的变化成正相关关系。但应力的增长比例关系不同于冲击速度的增长比例关系。在冲击速度从0.5 mm/ms增大到2.5 mm/ms的过程中,冲击速度增大为原来的5倍,但最大主应力以及X、Y、XY方向上的最大应力只增大为原来的3~4倍。
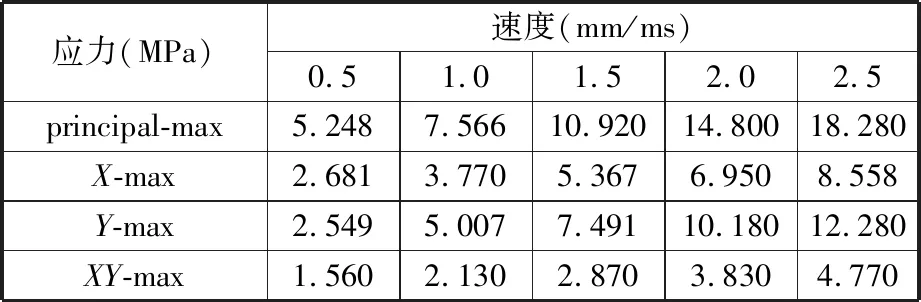
表3 工件在不同速度下的应力

图6 冲击速度变化下的易碎件最大应力变化图
3.2 工件壁厚的变化
选取易碎件壁厚的变化形成第2组有限元模型,壁厚依次取0.5 mm、1 mm、1.5 mm、2 mm、2.5 mm。速度选择1 mm/ms时,易碎件所受的最大主应力以及在X、Y、XY方向上的最大应力如表4所示,显然,随着易碎件厚度的增大,应力将逐渐减小。工件所受的最大主应力以及在X、Y、XY方向上的最大应力变化如图7所示。

表4 工件在不同壁厚下的应力

图7 工件壁厚变化下的易碎件最大应力变化图
图7中,最大主应力以及在X、Y、XY方向上的最大应力的曲线变化趋势相类似,但最大主应力和Y方向上的最大应力变化较X、XY方向上的最大应力变化明显。在较小壁厚0.5~1.0 mm阶段,应力急剧减小,最大主应力和Y方向上的最大应力减小约9.1 MPa,X、XY方向上的最大应力减小约5.3 MPa。在较大壁厚1.0~2.5 mm阶段,应力缓慢减小,其中最大主应力和Y方向最大应力减小约4.6 MPa,X、XY方向最大应力减小约1.9 MPa,壁厚平均每增大0.5 mm,对应最大主应力、Y方向最大应力减小1.5 MPa,X、XY方向最大应力减小0.7 MPa;壁厚0.5~1.0 mm的应力变化是壁厚1.0~2.5 mm应力变化的6~7倍。显然,易碎件壁厚的变化对碰撞接触应力非常敏感。
3.3 冲击加速度的变化
选择机械手抓取冲击的加速度变化形成第3组有限元模型,机械手以1 mm/ms的速度碰撞易碎件,在碰撞瞬间施加的加速度分别为0.5 mm/ms2、1 mm/ms2、1.5 mm/ms2、2 mm/ms2、2.5 mm/ms2。此状态下,所受的最大主应力以及在X、Y、XY方向上的最大应力如表5所示。随着机械手指加速度的递增,作用于薄壁易碎件的冲击应力增大,对应的有限元仿真分析应力变化如图8所示。
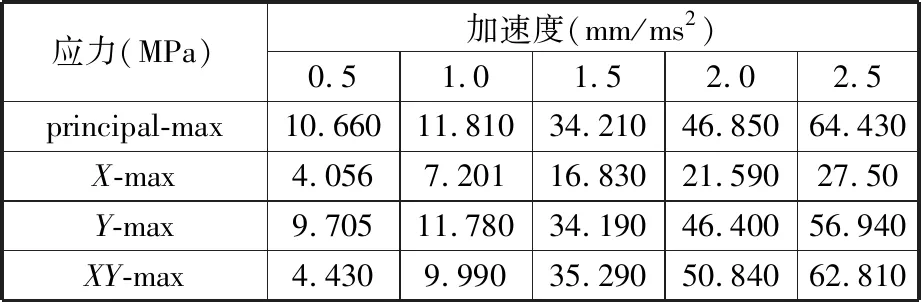
表5 工件在不同加速度下的应力
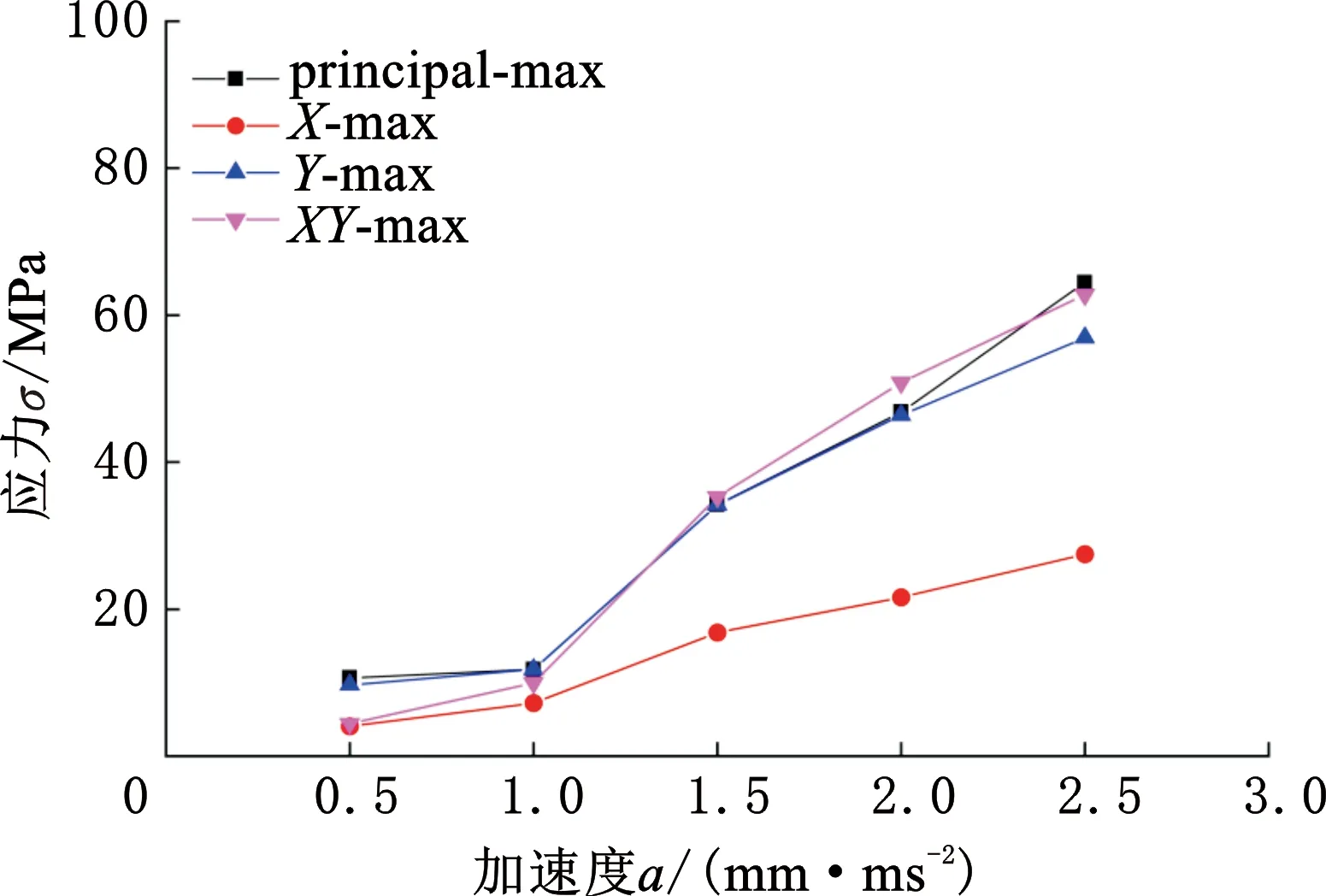
图8 加速度变化下的易碎件应力变化图
图8中,最大主应力以及在X、Y、XY方向上的最大应力的曲线变化趋势类似,但是,在1.0~2.5 mm/ms2区间,最大主应力和Y、XY方向上的最大应力曲线较X方向上的最大应力曲线变化明显。在较低加速度0.5~1.0 mm/ms2阶段,应力增大较为平缓,最大主应力和X、Y、XY方向上的最大应力增大了2.1 MPa。在较高加速度1.0~2.5 mm/ms2阶段,应力增大较为明显,X方向最大应力增大了20 MPa,而最大主应力和Y、XY方向上的最大应力增大了约49 MPa,加速度平均每增大0.5 mm/ms2,对应X方向最大应力增大6.7 MPa,而最大主应力和Y、XY方向上的最大应力增大16.3 MPa。显然,加速度在1.0~2.5 mm/ms2区间时,最大主应力和Y、XY方向上的最大应力变化是0.5~1.0 mm/ms2区间对应最大应力变化的8~9倍。
3.4 仿真结果的讨论
对于普通玻璃,其失效应力在10~90 MPa之间变化,当失效应力约为70 MPa、最大有效塑性应变为0.01时,其仿真结果与实验结果相仿[21]。通过对机械手抓取过程中的冲击速度、冲击加速度、易碎件厚度进行改变并分析,可得出以下结论:
由于玻璃易碎件的抗拉能力较差,因此它对拉应力较为敏感,在同等的抓取条件下,速度的改变对抓取可靠性的影响最大,这是因为速度的改变对冲量的影响较大,在碰撞瞬间冲击力也会显著增大,从而会降低抓取的可靠性。
根据实例分析结果,当易碎件壁厚为2 mm、作业冲击速度大于4.5 mm/ms时,应力会急剧增大,应力明显超过70 MPa,工件发生破坏;当壁厚为0.25 mm、作业冲击速度为1.5 mm/ms时,工件受到破坏,破坏时最大应力约为76 MPa;当工件壁厚为2 mm、作业冲击速度为1 mm/ms时,冲击瞬间加速度达到3 mm/ms2,应力约为72 MPa,使得薄壁易碎件碎裂。为防止玻璃环发生破坏,当壁厚为2 mm时,机械手速度应小于4 mm/ms;当壁厚为0.25 mm时,机械手速度应小于1 mm/ms;当壁厚为2 mm、作业冲击速度为1 mm/ms时,加速度应低于2.5 mm/ms2。
4 Kriging代理模型的构建与应力预测
由于有限元模型设计复杂且仿真运行时间较长,为根据已有的计算结果评估在相近参数作业下的机械手抓取接触应力,本文建立了Kriging预测模型。为使实验数据可视化,采用图形用户界面(graphical user interface,GUI)设计,其流程如图9所示。
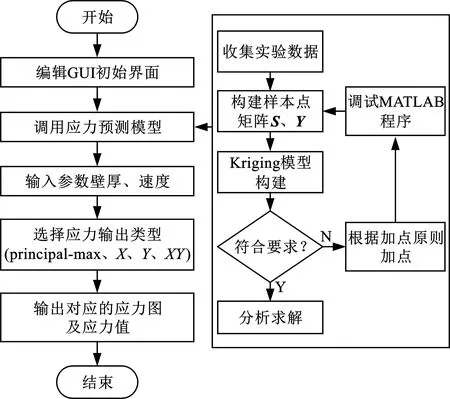
图9 Kriging预测模型及GUI界面设计流程图
Kriging插值方法是一种能够对有限区域内进行无偏最优估计的空间局部内插法[22]。该方法以实验数据为计算点,对取值数据进行加权插值的权值设计,是一种精确的插值方法,具有预测精度高、耗时少的特点[23]。
对于给定m个包含壁厚、速度的样本点S=[s1s2…sm]T,其输出响应principal-max、X-max、Y-max、XY-max等应力可表示为Y=[y1y2…ym]T。对上述数据作标准化处理,即
(1)
其中,S:,j、Y:,j分别为给定样本点矩阵S、Y中的第j个列向量;μ[·]、V[·,·]分别为均值和协方差;n、q分别为输入样本矩阵和输出样本矩阵中的列数。
对于Kriging模型选定的样本点x,其对应的应力预测函数响应值定义为y(x),其一般表达式可记为
(2)
假设随机过程z(x)的均值为0,则协方差为
Cov(z(xi),z(xj))=σ2R(xi,xj,θ)
(3)
其中,σ2为系统响应随机过程z(x)的方差;xi、xj为样本点;R(xi,xj,θ)表示带有参数θ的相关模型,通过优化θ,该模型能够自适应地调节样本点之间的空间相关性,其相关函数表达式如下:
(4)
本文通过最大似然估计法得到参数θ的估计值,其表达式如下:
(5)
其中,|R|是R的行列式。
本文研究的机械手冲击仿真实验以壁厚和速度为自变量,其中壁厚区间为0.25~2.50 mm,速度区间为0.5~4.5 mm/ms,将不同速度、壁厚的样本点写入样本矩阵S。应力为输出变量,应力包括最大主应力和在X、Y、XY方向上的最大应力,将多种应力写入样本矩阵Y。Kriging代理模型的回归模型用零阶多项式表达。相关函数采用高斯函数。
Kriging模型建立在一定数量样本点的基础上。样本点的选取关乎Kriging预测模型的准确与否,本文采用矩形网格设计。选用的壁厚、速度是均匀分布的样本点,能最有效地控制或降低计算预测的统计不确定性,提高预测模型的可靠性。针对多种基于代理模型的加点准则,本文选取均方误差准则[24],可以找出样本误差期望值最大的点,从而快速地提高全局精度。初始的代理模型成功后,可以发现在样本点(2.5,3.5)、(1,3)处的应力预测误差较大,运用SolidWorks、Hyper-Mesh、LS-PrePost等软件进行集成建模,得到仿真分析结果。并将壁厚、速度、仿真结果写入样本矩阵S、Y,从而添加新的样本点,以提高预测模型的拟合程度。
利用MATLAB软件DACE工具箱,设置以壁厚、速度为X、Y坐标,以应力为Z坐标,通过编程调用工具箱中的函数指令,计算得到的在不同壁厚,速度条件下应力大小的预测模型,如图10所示,可以看出,当壁厚在0.5~2.5 mm、速度在0.5~4.0 mm/ms时,应力变化较小,并且随速度增大、壁厚的减小,应力呈现增大的趋势。但是,当壁厚小于0.5 mm、速度超过4 mm/ms时,应力会急剧增大,直至破坏。为防止易碎件破坏,机械手速度应小于4 mm/ms,壁厚应大于0.5 mm。
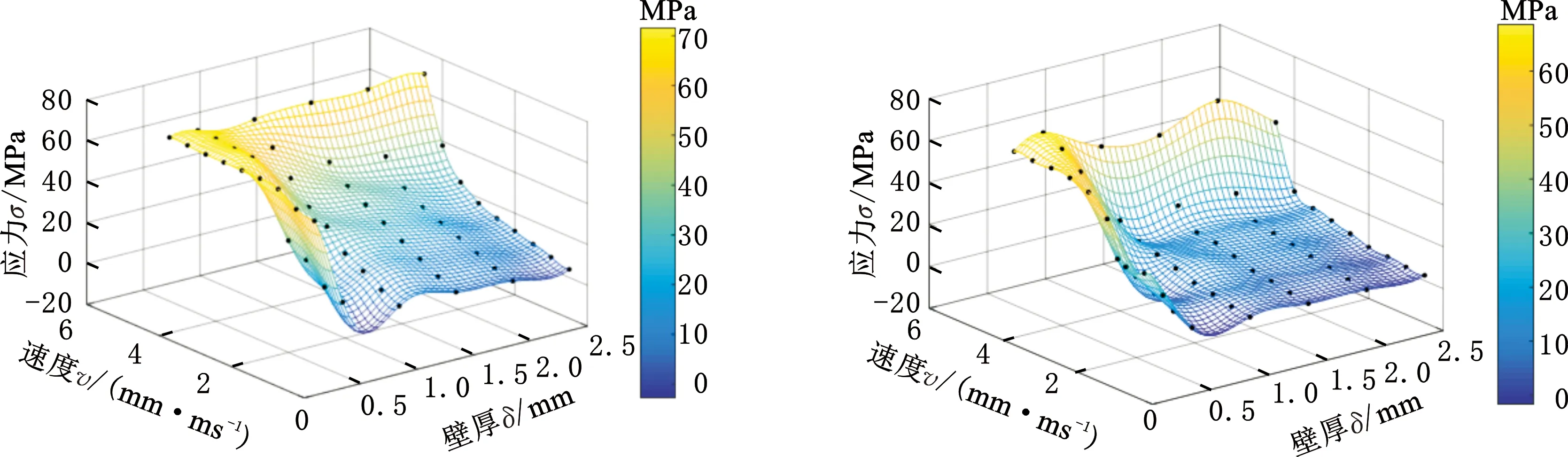
(a)principal-max应力图 (b)X-max应力图
为使应力结果可视化,运用MATLAB下的子模块GUI进行研究,并设计Kriging预测模型的GUI界面。运行程序弹出GUI设计界面,通过输入壁厚、速度参数,即可输出Max应力图形与相应的应力值,方便设计人员对机械手作业参数进行评估与优化。在系统的界面设置许用应力值,当评估的最大应力值达到或超过许用应力值时,将给出系统提示,如图11所示。

(a)principal-max应力GUI界面 (b)X-max应力GUI界面
5 薄壁工件内撑式上料机械手样机抓取实验
为了验证机械手抓取不同厚度易碎工件的可靠性以及得到手指抓取过程的冲击受力,根据设计的手指结构,搭建内撑式机械手样机及实验系统,如图12所示。

图12 机械手样机及实验系统
机械手的手指体材料为铝合金,手指垫材料为橡胶,工件材质为石英玻璃,相关参数见表1和表2。实验中,实验工件的厚度分别取1.5 mm、1 mm、0.8 mm。图13给出了厚度为1 mm的工件实样及测试应变片粘贴位置。

图13 不同壁厚的薄壁玻璃环及应变片粘贴
为了测试机械手抓取工件的冲击速度,采用OLYMPUS高速摄像机对机械手抓取工件的过程进行抓拍。高速摄像机的拍摄帧频设置为每秒500帧,可以得到机械手指在对应时刻下的位置图片。对抓拍的图片进行整合处理,可得到机械手指抓取时刻下的位移-时刻图像,从而得到机械手指抓取运动的速度与加速度。图14为高速摄像机抓拍到的机械手指不同位置-时刻图像。

图14 不同位置-时刻图像
机械手指的运动由气缸运动驱动。在机械手样机实验系统中,通过安装精密调压阀调节气缸的进出压力即可控制机械手指的运动速度,然后利用高速摄像机捕捉机械手指运动时的图像即可计算出机械手指抓取运动的速度和加速度。在机械手指抓取工件前,通过实验测定了系统压力以及机械手指的运动速度、加速度的对应关系与控制参数。
对于易碎件应力的测量,采用在工件表面粘贴应变片测量。实验中采用DH3816静态应变测试系统。该系统有6个通道,每个通道有10个采集点,采样速度可达到每秒60点,最高分辨力可达到1 με。在操作系统中输入玻璃的弹性模量,即可显示出工件玻璃环对应点的应力。
实验中,采用机械手抓取1.5 mm、1 mm和0.8 mm厚的薄壁玻璃圆环,将应变片粘贴在薄壁环被机械手指抓取位置的背面。打开气动电磁阀的开关使机械手运动抓取薄壁环,利用静态应变测量仪的连续采集功能在持续采集数据模式下记录系统采集到的薄壁环表面的应力。
依据现有的机械手样机系统的结构与参数,实验选择的参数如表6所示,其中,垫厚(手指垫厚度)1、2、3分别为2 mm、1.5 mm和1 mm,壁厚(工件厚度)1、2、3分别为1.5 mm、1 mm、0.8 mm,位置(机械手爪抓取工件时,与工件的作用位置)1、2分别表示齐平10 mm和内降10 mm,速度(机械手指抓取工件的冲击速度)1、2、3分别为0.16 mm/ms、0.13 mm/ms和0.1 mm/ms。
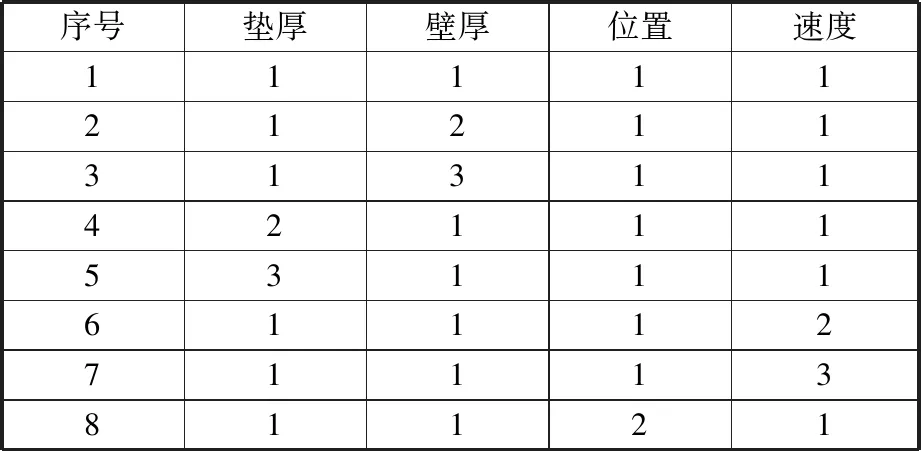
表6 实验参数选择
依据实验选择的参数,分别进行了仿真计算与实验测试,对机械手碰撞实验测试应力结果的最大值进行平均处理,并且选择接触碰撞仿真计算应力数据的最大值,如图15所示。
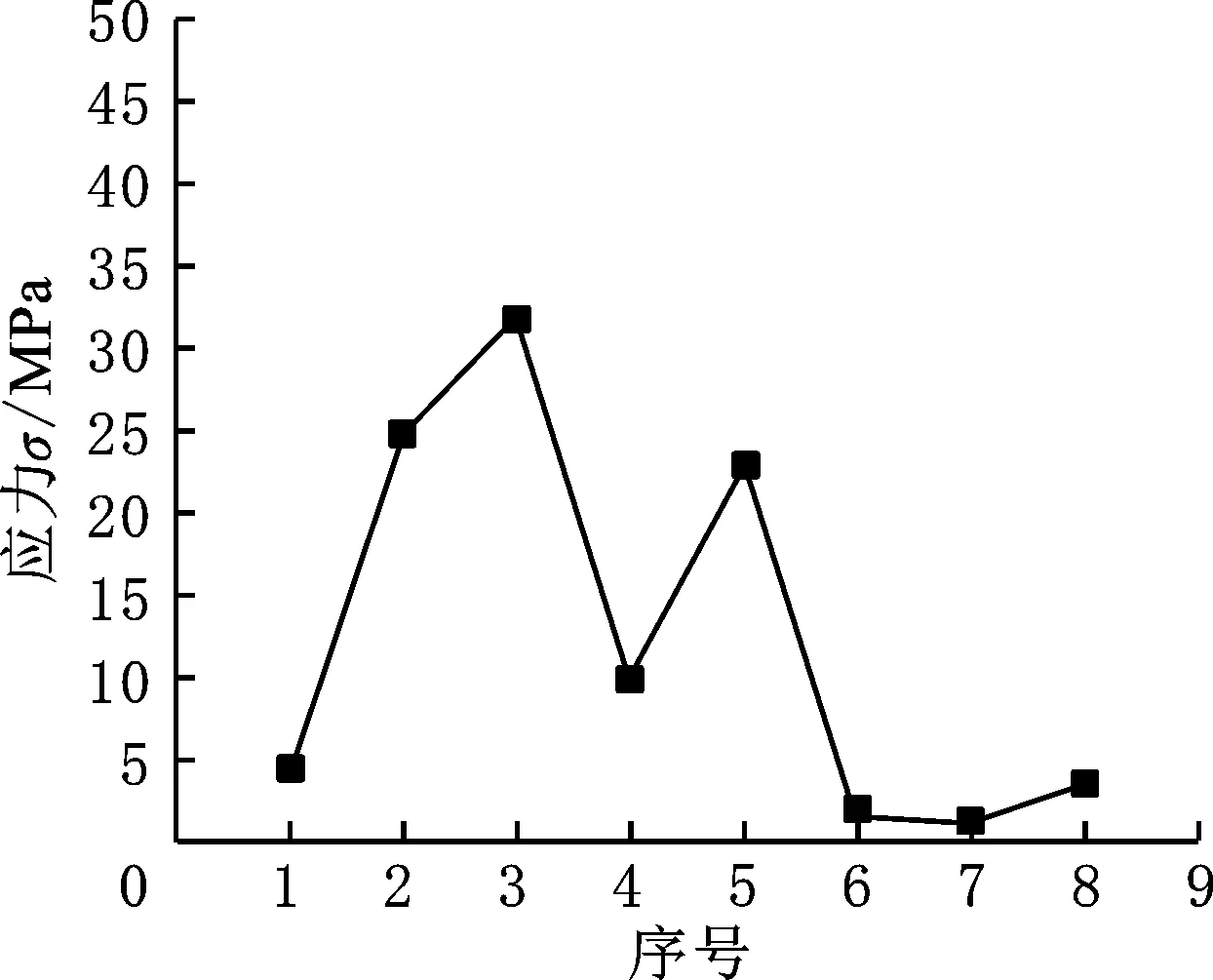
(a)实验数据
从图15中可以看出,实验数据与仿真数据变化规律一致,但是其应力值相差过大。进一步分析可知,在仿真计算中,采用的是单个机械手指进行抓取作业。而在实验中,利用单个机械手指很难实施对工件抓取。为方便实验数据采集,采用了三爪机械手进行抓取作业。
为研究机械手采用三指实际抓取与采用单指仿真抓取的应力关系,建立了相关模型进行研究。假设圆环的应变是均匀的,且每个单元受到的力均为F,面积为ΔA,机械手布置及受力如图16所示。
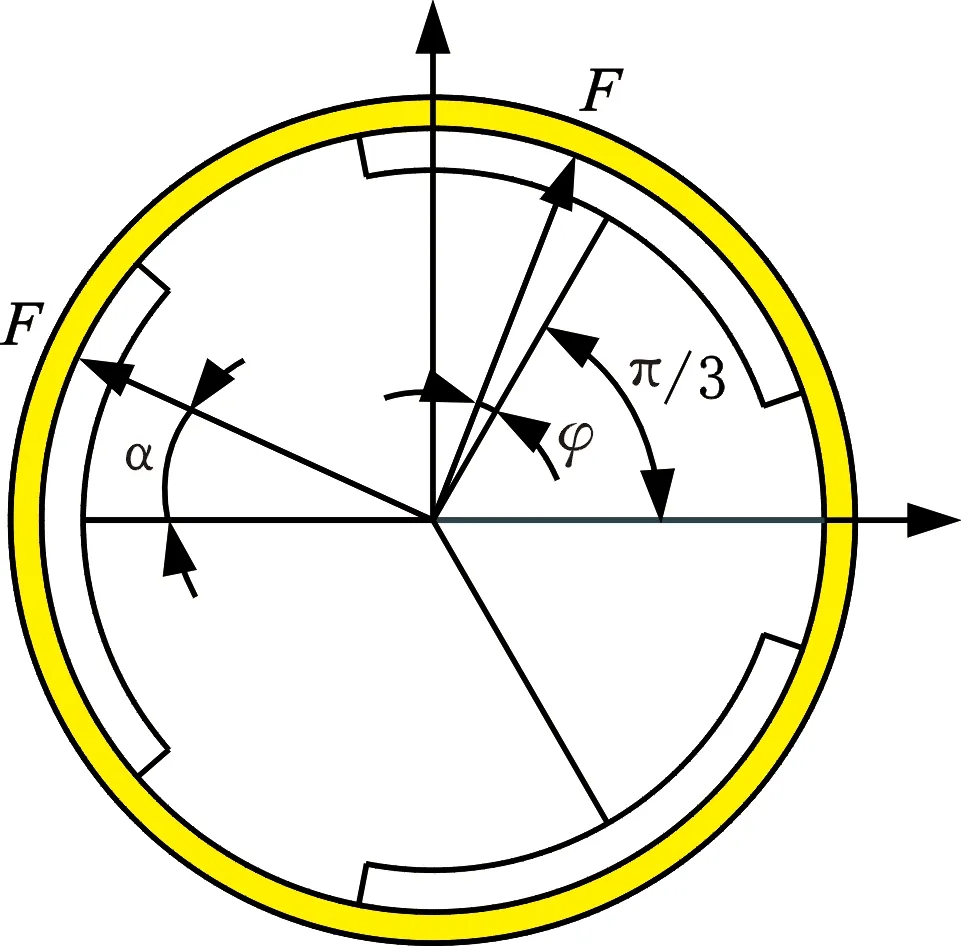
图16 机械手三爪布置及受力
当机械手选用一个手指时,手指的布置如图16的左侧所示,用α表示受力点位置的角度,则Y方向上的应力可表示为
(6)
当机械手采用三个手指时,其他2个手指的布置如图16的右侧所示,用φ表示受力点位置的角度,则Y方向上的应力可表示为
(7)
单指机械手与三指机械手的抓取应力转换关系为
(8)
依据上述关系对仿真数据进行变换:将采用单指抓取仿真获得的应力值乘以5.7即可得到三指抓取对应的仿真应力值。实验数据与变换后的仿真数据如图17所示,显然可见两者数据相近。

图17 实验数据与变换后的仿真数据对比
对比序号1、2、3可以得出工件应力随壁厚变化的规律,对比序号1、4、5可以得到工件应力随着手指垫厚度的变化,对比序号1、6、7可以得到机械手运动速度对工件应力的影响,对比序号1、8可以得到碰撞位置对工件应力的影响。分析图17不难发现,工件壁厚和手指垫厚度对工件的影响较大,而其他因素对工件的影响相对较小。
实验结果表明,该机械手可以完成不同厚度易碎工件的可靠抓取,工件表面没有破损情况。实验结果与仿真计算结果吻合。
6 结语
通过建立薄壁易碎件内撑式上料机械手抓取作业过程的有限元模型,对机械手指与易碎件之间的碰撞过程进行仿真分析,研究了机械手作业过程中不同的抓取冲击速度、工件壁厚、抓取加速度等因素对工件内力的影响规律。并通过建立Kriging代理模型,计算得到在不同壁厚、抓取速度条件下接触应力的预测值,研究过程为改良手指结构及确定作业过程参数建立了基础。相关研究结果通过实验也得到了验证。
在后续的研究中,笔者将进一步研究机械手构型、结构参数变化对接触碰撞应力的影响。并进一步完善实验设备及条件,对相关理论分析结果进行更精细的验证研究。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26
建井技术(2022年4期)2022-10-13
实用手外科杂志(2022年2期)2022-08-31
小聪仔(婴儿版)(2020年12期)2021-01-26
复杂油气藏(2018年4期)2019-01-16
通信电源技术(2016年1期)2016-04-16
少年科学(2015年8期)2015-08-13
中国铁道科学(2015年4期)2015-06-21
机电信息(2015年3期)2015-02-27
河南科技(2014年11期)2014-02-27