
弱连接VSC的锁相环同步暂态稳定综述
2023-09-11 07:07李霞林唐王倩云
电力自动化设备 2023年9期
潘 莉,李霞林,王 智,唐王倩云,郭 力
(1.天津大学 智能电网教育部重点实验室,天津 300072;2.南方电网科学研究院有限责任公司 直流输电技术国家重点实验室,广东 广州 510663)
0 引言
随着电力系统中新能源机组所占比例的不断提高,以传统同步机为主导的电力系统将逐渐演变为以电力电子变流器为主导的新型电力系统[1-2]。电压源变流器(voltage source converter,VSC)以其能够实现功率双向流动、具有四象限运行的特点和运行控制方式灵活多样等优势在可再生能源并网、柔性直流输配电等领域均得到广泛应用。基于dq旋转坐标系和锁相环同步(phase locked loop synchronization,PLL-Syn)的双闭环矢量控制技术因具有控制系统成熟可靠、有功和无功功率解耦控制的优势,被广泛应用于VSC 并网控制[3-4]。高渗透率可再生能源接入及大容量、远距离电能输送可能会导致VSC运行于弱交流电网条件。弱连接VSC(weak-grid connected VSC,WG-VSC)系统在电网故障等大扰动下易出现3 类PLL-Syn 暂态失稳现象:①失去平衡点;②平衡点存在但小扰动不稳定;③无法过渡至新的可行平衡点[5-6]。本文重点关注第3 类暂态失稳现象。
当WG-VSC 系统出现PLL-Syn 暂态失稳现象时,会引起闭锁保护动作,导致大规模新能源机组脱网,进而影响整个电网的安全运行[7-8]。如2011年甘肃酒泉风电基地出现短路故障,进而引发大规模风电脱网事故,导致西北地区电网频率由50.034 Hz跌落至49.854 Hz,严重威胁电网频率安全;在新能源发电比例高达50 % 的南澳大利亚,2016 年某日极端天气(台风暴雨)引起电压跌落导致大量风机脱网,进而使得与维多利亚州相连的275 kV 联络线上的潮流瞬间增大至900 MW,联络线上的断路器跳开,系统崩溃,导致南澳大利亚州大停电超过50 h,上述现象均与低电压穿越(low voltage ride-through,LVRT)期间VSC 和弱交流电网之间的动态耦合密不可分。可以预见,在越来越多新能源接入电力系统的发展趋势下,交流电网将越来越弱,电力电子装备的锁相环动态与弱交流电网之间的交互作用将愈发复杂[9-10]。
在理论研究方面,自2009 年文献[11]首次揭示了电力电子装备接入弱交流电网发生PLL-Syn 暂态失稳现象以来,近十几年来国内外学者在WG-VSC系统的PLL-Syn 暂态失稳机理、量化分析方法、稳定性提升控制措施等方面做出了大量研究,并重点围绕单个WG-VSC 系统在对称故障等大扰动下的PLL-Syn暂态稳定性进行研究。文献[12]从WG-VSC系统的同步控制策略、静态失稳与动态失稳机理、致稳方法等角度进行综述,并指出现有稳定性研究中存在的不足。文献[13]从WG-VSC 失稳机理、研究方法与镇定方法3 个角度对现有研究进行综述,梳理与总结了现阶段并网变换器暂态同步稳定性问题的研究成果与一般性方法。文献[14]从建模、失稳机理、分析方法等角度进行综述,阐述了此类问题构建的基本系统模型,并简要罗列了几种适用的分析方法,如等面积法与相轨迹法。
现有研究综述点多面广、方法描述偏简略,本文聚焦于单个WG-VSC 系统在对称故障等大扰动下的PLL-Syn 暂态稳定性问题。介绍典型的WG-VSC 系统及其双环控制结构,通过详细电磁暂态仿真直观地展示2类典型的PLL-Syn暂态失稳现象,并推导了相应的简化数学模型。然后分别从PLL-Syn 暂态失稳机理、基于数值积分和基于直接法的PLL-Syn 暂态稳定分析方法这3 个方面,给出了相应的基本原理及其研究综述,并进行对比分析。在综述以VSC注入有功/无功电流为参数空间的暂态稳定域基础上,提出电流可行域(feasible region of current,FRC)定义与构建方法;并进一步总结归纳提升PLL-Syn暂态稳定性的两大类控制策略。最后提出结论并进行展望。
1 WG-VSC 系统发生PLL-Syn 暂态失稳现象及适用于该问题分析的简化数学模型
1.1 WG-VSC系统及基于PLL-Syn的双环控制
本文考虑的WG-VSC 系统主电路拓扑及控制系统如图1 所示。图1(a)中:Pin为VSC 直流侧输入功率;C为直流母线电容;Udc为直流母线电压;VSC 经LC 滤波器并网,Lf和Cf分别为滤波电感和电容;E、Vt、VF、Vs和It分别为VSC 出口电压、并网点电压、故障点F电压、无穷大电源电压和VSC 经并网点注入电流;ZF和Zg分别为并网点至故障点和故障点至无穷大电源之间的等效阻抗。

图1 WG-VSC系统主电路拓扑和控制系统Fig.1 Main circuit topology and control system of WG-VSC system
VSC 采用基于PLL-Syn 的双闭环矢量控制策略,其控制系统包括锁相环控制、外环控制和电流内环控制。其中,锁相环控制主要通过比例积分(proportional integral,PI)控制器将并网点电压q轴分量Vtq调整为0,实现d轴与并网点电压之间的同步。图1(b)中:kp和ki分别为锁相环控制器的比例和积分系数;θpll和Δωpll分别为锁相环控制器输出相角和角频率变化量;ωs和ωn分别为无穷大电网角频率与额定角频率。
VSC 外环控制包含有功控制环路和无功控制环路,根据不同的应用需求和控制功能,有功控制环路可以选择直流电压控制或有功功率控制,无功控制环路可以选择交流电压控制或无功功率控制。在WG-VSC 系统中通常采用直流电压和交流电压控制模式,在正常运行工况下,通过直流电压控制和交流电压控制经PI 控制器生成d、q轴电流参考值Itdref、Itqref,kp1、ki1和kp2、ki2分别为对应PI控制器的比例和积分系数。需要指出的是,本文所综述的分析方法也可应用于其他外环控制策略。当电网发生故障时,尤其在LVRT期间,Itdref和Itqref由具体的故障穿越控制策略直接给定。图1(b)中:Udcref、Vtref分别为直流母线电压和并网点电压幅值Vt的参考值。
VSC 电流内环控制中,d、q轴电流采用常规PI控制策略,实现VSC 输出电流dq轴分量Itd、Itq对电流参考值的追踪,并生成VSC 出口电压信号d、q轴分量Ed、Eq。图1(b)中:Vtd、Vtq分别为Vt的d、q轴分量。
1.2 PLL-Syn暂态失稳现象
对于WG-VSC 系统而言,直流侧功率大幅阶跃、网侧发生严重故障等都可能引发PLL-Syn 的暂态失稳现象。为了直观展示上述2 类大扰动下WG-VSC系统的PLL-Syn 暂态失稳现象[8,15],基于图1 所示WG-VSC 系统主电路拓扑,在PSCAD/EMTDC 中搭建WG-VSC 系统的详细开关模型,模型参数见文献[3,5]。
1.2.1 直流侧功率大幅阶跃
为展示WG-VSC 系统因直流侧功率大幅阶跃引起的PLL-Syn 暂态失稳现象,考虑如下2 组仿真工况。工况1:t1=1 s 时Pin由1 p.u.阶跃至1.15 p.u.;t2=3 s 时Pin由1.15 p.u.阶 跃 至1.2 p.u.;t3=6 s 时Pin由1.2 p.u.阶跃至1.25 p.u.。工况2:t1=1 s时Pin由1 p.u.直接阶跃至1.25 p.u.。相应的仿真结果如图2所示。图中:θt为并网点电压相角;Udc、Vt、xpll=∫Vtqdt均为标幺值。

图2 直流侧功率阶跃下暂态仿真结果Fig.2 Transient simulative results under DC-side power step
由图2(a)可知:当Pin由1 p.u.经过3次小幅阶跃至1.25 p.u.时,WG-VSC 系统PLL-Syn 暂态稳定,这表明工况1下Pin=1.25 p.u.时WG-VSC系统存在小扰动稳定平衡点。由图2(b)可知:当Pin直接由1 p.u.大幅阶跃至1.25 p.u.时,WG-VSC 系统PLL-Syn 发生暂态失稳现象。当直流侧功率大幅阶跃时,即使扰动后的系统存在新的小扰动稳定平衡点,系统仍有可能失稳。在WG-VSC 系统中,当源侧发生功率波动时,可能发生PLL-Syn 暂态失稳现象,因此有必要探究此类暂态稳定机理与关键影响因素,为大规模新能源稳定运行控制提供理论与技术支撑。
1.2.2 网侧发生严重故障
网侧发生严重故障也可能引发WG-VSC 系统的PLL-Syn 暂态失稳现象。考虑如下2 组仿真工况。工况3:t1=1 s 时,故障点电压对称跌落至0.1 p.u.;t2=3 s时,故障点电压进一步对称跌落至0.075 p.u.。工况4:t1=1 s 时,故障点电压对称跌落至0.075 p.u.。相应的仿真结果如图3所示,图中:ωpll为锁相环角频率;Vtq为标幺值。上述2 种工况下,在故障初始时刻t1=1 s时,电流设定值Itdref、Itqref均从故障前的0.7 p.u.、0 分别调整至0 和1 p.u.,以进行故障限流和无功支撑模拟。
由图3(a)可知,故障点电压通过2 次跌落至0.075 p.u.时,系统PLL-Syn 稳定;由图3(b)可知,当故障点电压直接跌落至0.075 p.u.时,系统PLL-Syn发生暂态失稳现象。对比图3(a)、(b)的仿真结果可知,在网侧发生严重故障的大扰动下,WG-VSC 系统亦存在PLL-Syn暂态失稳现象。
由图2、3 所示仿真结果可知,WG-VSC 系统在受到直流侧大幅功率波动、网侧严重故障等大扰动后,即使存在满足小扰动稳定的可行平衡点,由于WG-VSC 系统的PLL-Syn 输出无法稳定跟踪电网频率,失去与电网同步的能力,导致WG-VSC 系统无法从扰动前的平衡点稳定过渡至新的可行平衡点。该现象即为PLL-Syn 暂态失稳现象。此问题将严重威胁到高比例新能源和电力电子化电力系统的安全稳定运行,有必要进行深入分析。
1.3 适用于PLL-Syn暂态稳定分析的简化数学模型
本节将在图1 所示主电路和控制结构的基础上,给出分别适用于不同类型PLL-Syn 暂态稳定现象分析的简化数学模型,为后续PLL-Syn 暂态稳定分析方法综述提供模型基础。
由于讨论的是PLL-Syn 时间尺度暂态特性,在简化分析过程中,考虑以下假设[16-21]:
1)电流内环动态通常远高于外环控制和锁相环控制动态,故忽略电流内环动态,即认为VSC注入电流Itd、Itq可近似实时跟踪参考值Itdref、Itqref;
2)忽略LC滤波器和交流电网电磁暂态影响;3)忽略变流器损耗,不考虑调制过程延时和采样延时。
基于上述简化条件,可得WG-VSC 系统的简化等值模型,如图4所示。
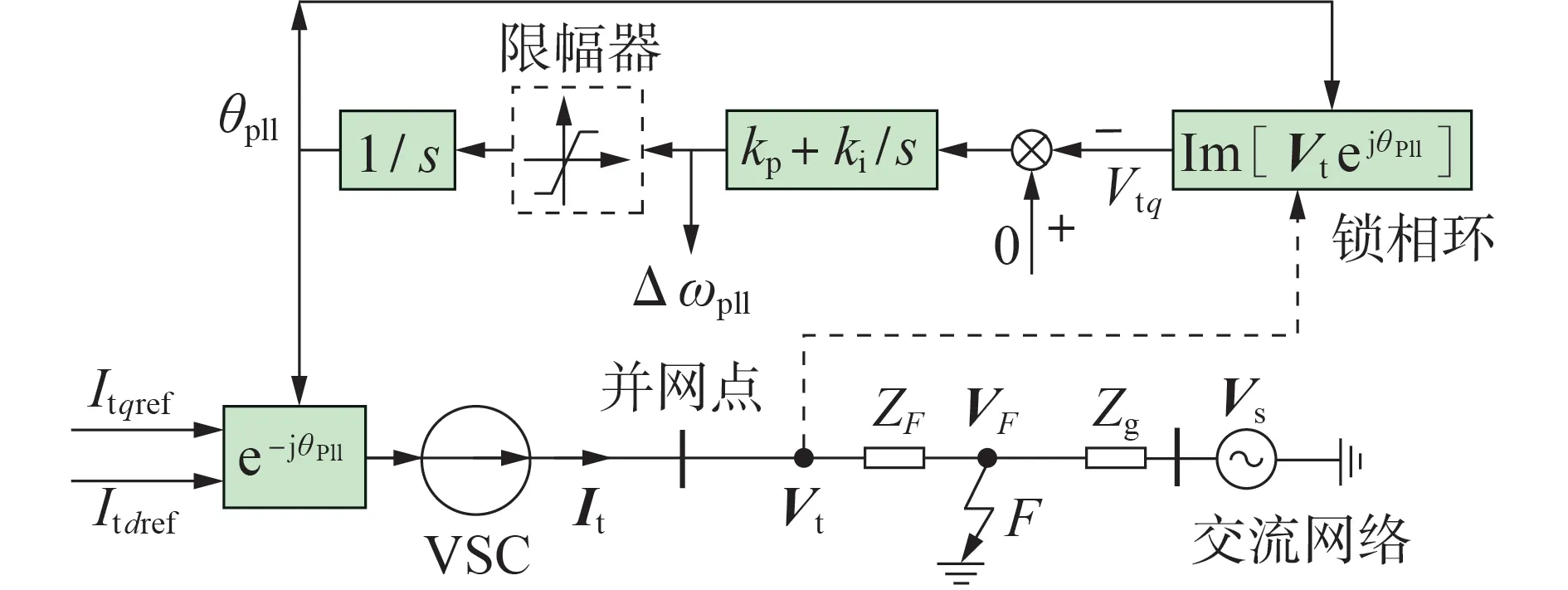
图4 WG-VSC系统的等值模型Fig.4 Equivalent model of WG-VSC system
基于图4 所示WG-VSC 系统等值模型,可进一步推导适用于PLL-Syn 暂态稳定分析的简化数学模型。WG-VSC 系统在直流侧功率大幅阶跃下与网侧发生严重故障时发生暂态失稳现象的简化数学模型具体表达式分别如附录A 式(A1)、(A2)所示,详细推导过程可参考文献[6,22]。
需要说明的是,已有的研究表明,虽然限幅环节可以将频率限制在合理范围内,但会对WG-VSC 系统的暂态同步稳定特性产生一定的影响[23-25]。文献[23]从系统故障期间是否存在静态平衡点两方面,考虑了限幅器对故障期间系统同步动态响应的影响。文献[24-25]则采用Lyapunov 函数(Lyapunov function,LF)描述了系统的暂态稳定边界,定量分析了限幅器对WG-VSC 系统暂态稳定性的影响。是否考虑输出限幅,对于暂态稳定分析而言主要在于数学模型上的区别,后文中PLL-Syn 暂态稳定分析及稳定提升的方法在考虑输出限幅的条件下分析。
2 PLL-Syn暂态稳定分析方法
基于平衡点线性化的小扰动稳定分析方法无法解释WG-VSC 系统在直流侧功率大幅阶跃、网侧发生严重故障等大扰动下的PLL-Syn 暂态失稳现象,下面基于现有研究,总结分析WG-VSC 系统的PLLSyn 暂态稳定分析方法。PLL-Syn 暂态稳定分析方法综述如图5所示。
2.1 PLL-Syn暂态失稳机理分析方法
有不少学者研究发现WG-VSC 系统的PLL 动态特性可类比为单机-无穷大系统(single machine-infinite bus,SM-IB)的转子同步动态特性。因此,可将等面积法则[26-31]推广应用至揭示WG-VSC 系统的PLL-Syn暂态稳定机理。
文献[13,32-35]基于传统等面积法则,通过比较加速面积与最大减速面积的大小关系来判断系统暂态稳定性。但分析的前提是忽略了系统阻尼,难免会遇到保守性较高且稳定判断不准确的问题。为弥补忽略负阻尼带来的不准确稳定估计,文献[31,36-37]忽略了负阻尼区间,对正阻尼区间进行了有效暂态稳定分析,提高了分析的保守性,且构建了有效的暂态稳定估计域,可以作为系统暂态稳定的充分判据。在正阻尼区间内,文献[30]分析了不同短路比下锁相环动态对PLL-Syn 系统暂态稳定的影响,并提出了相应的锁相环参数设计措施,以保持系统同步以及故障穿越的能力。短路比越小,交流电网越弱,VSC 并网暂态稳定能力越弱。当明确系统其他影响参数时,可确定VSC运行的短路比极限值。综合以上传统等面积法则与限定正负阻尼区间的改进等面积法则的思路,为了达到准确估计的基础上且缩小保守性的目的,文献[38]提出了考虑负阻尼情况的改进等面积法则,通过选定角频率最大值ωmax修正类比阻尼Deq,对负阻尼进行合理缩放,重新划定了最大减速面积Sdec.max的区域,确定了Sdec.max积分的上、下限区间,达到合理判断系统暂态稳定情况的效果。考虑Deq的正负性及其处理方式,梳理总结了3种不同等面积法则及其改进法则,具体如表1所示。表中:Sacc为等效加速面积;θplle,0—θplle,5为不同等面积法则分类下计算等效加速、减速面积的积分起始与终止锁相环相角,具体见附录B图B1;Pm2、Pe2分别为类比机械功率与电磁功率。
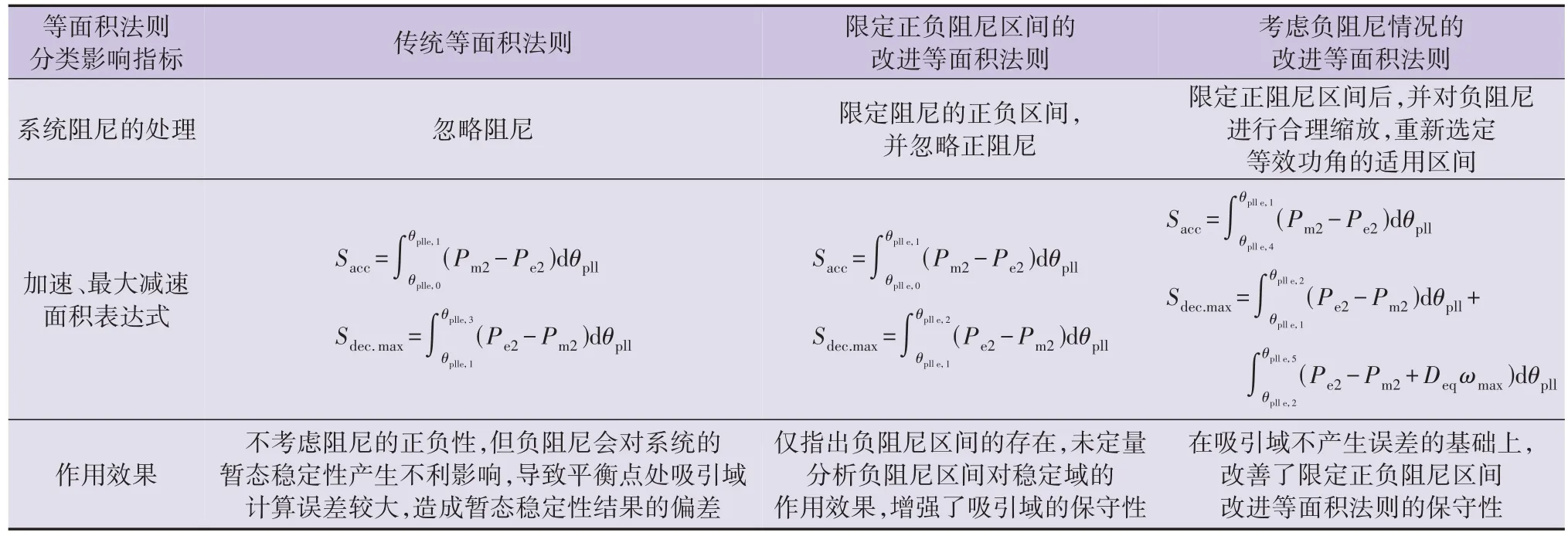
表1 等面积法则及其改进方法Table 1 Equal area criterion and its improvement method
由于作用影响效果的不同主要体现在最大减速面积上,因此图B1 中分别对3 种等面积法则的最大减速面积区域进行标注。
2.2 基于数值积分的PLL-Syn暂态稳定分析
相轨迹法与逆轨迹法均基于数值积分,对WGVSC 系统的PLL-Syn 暂态稳定进行分析,能准确刻画非线性系统方程状态变量的轨迹和构造平衡点处的吸引域边界。
2.2.1 相轨迹法
相轨迹法[14,18-20,25,39-42]是一种基于数值积分的方法,用于分析非线性动力系统的图像轨迹。文献[14,18-19,39-40]介绍了相轨迹法的基本原理与实现方法,能较直观地描述WG-VSC 系统的PLL-Syn暂态失稳现象。针对网侧严重故障情形,整理2 阶非线性方程,如附录C式(C1)所示。
对于非线性系统方程ẋ=f(x),在f(x)连续可微的条件下,当给定初值Φ(t0)后,基于数值积分逐点刻画系统轨迹后即可得到上述方程的解。
进一步地,为探讨主电路参数、控制参数等对PLL-Syn暂态稳定的影响,文献[19]探讨了并网点电压幅值(Vt)、并网点至故障点线路阻抗(RF、XF)、锁相环控制参数(kp、ki)等系统参数对平面相轨迹的动态作用。短路比作为影响系统暂态稳定性的因素之一,反映了系统的弱连接特性,文献[25]基于相轨迹法展开了不同短路比下系统暂态稳定性的影响分析。同时文献[20,41]基于相轨迹法直观展示了系统阻尼与调节时间对系统暂态同步过程的动态作用,并提出通过降低系统动态响应速度与增大等效阻尼对于提升WG-VSC 系统在严重故障下的PLLSyn暂态稳定性具有显著效果。
考虑功率外环控制与锁相环的交互动态,分析WG-VSC 系统在正常运行情况下面临源侧大功率扰动时的暂态稳定性,整理4 阶非线性方程,如附录C式(C2)所示。
基于此,文献[42]通过相轨迹法直观展现了当外环控制参数改变时对WG-VSC 系统同步稳定过程的影响,表明忽略直流电压控制时会影响暂态稳定评估的准确性,并分析了不同短路比下对系统暂态稳定性的影响因素,相应地提出了参数优化策略。该方法基于时域积分能够直接对系统暂态同步稳定与否做出判断,但本质上属于数值积分方法,无法给定系统稳定裕度指标且难以评价系统的整体运行状态。
2.2.2 逆轨迹法
文献[43]指出,一般电力系统的小扰动稳定平衡点的吸引域边界∂Ω是由位于该边界上的不稳定平衡点的稳定流形Ws(xe)组成的。基于逆轨迹法刻画非线性系统ẋ=f(x)吸引域的本质则是刻画位于吸引域边界上的不稳定平衡点的稳定流形[44]。
具体步骤是:①将非线性系统右边取负号得到原系统的逆轨迹系统,具体表达式如附录D 式(D1)所示;②在不稳定平衡点的稳定流形上取点作为初值,对其积分求得一系列轨迹,并以逆轨迹的集合来估计穿过不稳定平衡点的吸引域边界[45]。
逆轨迹法可刻画出系统真实的吸引域边界,可实现对简单电力系统吸引域的准确刻画和可视化研究。文献[46]探讨了锁相环的PI 控制参数对WGVSC 系统吸引域的影响,指出增大比例系数或减小积分系数可增强系统的暂态同步稳定性。这种方法的应用同样存在如下问题:①无法给出所刻画吸引域边界的解析表达式,因此在利用该吸引域进行进一步理论分析或拓展应用时存在局限性;②对于高阶系统,刻画其不稳定平衡点的稳定流形变得十分困难,因而这种方法只适用于低阶系统,不具有一般性。
2.3 基于直接法的PLL-Syn暂态稳定分析
对于非线性系统ẋ=f(x),当系统阶数过高时,利用逆轨迹法构建其系统真实吸引域通常较为困难,计算量大且过程复杂。为此,可基于直接法,通过构造合适的LF,刻画扰动后平衡点的估计吸引域,进行WG-VSC 系统PLL-Syn 暂态稳定分析。直接法通常从构建相对保守性较低的最大估计吸引域(largest estimated domain of attraction,LEDA)的角度出发,来对故障后的系统状态进行判断。基于能量函数的构建,主要是选取合适的LF,基于LF 构建对应的LEDA,通过判断故障前的平衡点是否位于故障后平衡点的LEDA 内从而判断系统是否可以过渡或保持暂态稳定状态[47-49]。
针对WG-VSC系统PLL-Syn暂态稳定分析,2.3.1、2.3.2 节分别从解析能量函数与数值能量函数出发,对LF的构造方法进行总结分析。
2.3.1 基于解析能量函数的方法
针对WG-VSC 系统的PLL-Syn 暂态失稳现象,本节将以文献[50]中所述方法为例,介绍如何构建Lyapunov 能量函数,实现Lyapunov 能量函数的构建以及对动态过程中动、势能相互转化过程的机理解释[51-59]。
值得注意的是,Lyapunov 能量函数中的阻尼项是非线性且不定的。许多研究会选择忽略阻尼项对系统稳定分析的影响,如基于势能界面法(potential energy boundary surface,PEBS)的能量函数法[50-52]。也有一些研究会适当地对阻尼项进行处理,如固定阻尼的正向区间,如基于LaSalle 不变集的能量函数法[53-55]。基于此,对现有相关研究进行分类,如表2所示。

表2 Lyapunov能量函数法的实现形式Table 2 Realizing forms of Lyapunov energy function method
由表2 可知,文献[50-52]所提出的Lyapunov 能量函数忽略了系统阻尼,即忽略了负阻尼对系统暂态稳定域的影响,导致系统刻画了不准确的吸引域。为解决该问题,文献[53-55]限定了系统的正阻尼区间,并通过将PLL-Syn 型WG-VSC 系统与SM-IB 系统相类比,提出了Lyapunov 能量函数的构建方式以及系统等效动能与势能的表达式。但为了避免负阻尼效应造成的不准确稳定域,文献[53-55]构建了相对保守的稳定域,确保估计的有效性。
综合文献[50-55],当借助Lyapunov 能量函数法构建系统估计吸引域时,存在非线性阻尼项与保守性的矛盾、难以找到合适的能量函数这两大问题。为此,文献[56]提出结合奇异摄动理论与Lyapunov稳定性理论的暂态稳定分析方法,从快子系统与慢子系统出发,分别构建正定能量函数LF,仅当2个子系统均呈暂态同步稳定时,可判定系统处于稳定状态。文献[56]在一定程度上很好地解决了忽略非线性阻尼项以及难以构建合适的LF 这一难题。文献[57-58]基于Hamiltonian 模型及其耗散准则,构建了非线性系统遭遇大扰动故障后系统平衡点处的有效LEDA,达到了保守性较低的效果。但其本质上与限定阻尼为正向区间时的能量函数法相同,此处不再赘述。文献[59]基于WG-VSC 系统简化模型,提出了一种特殊的构建形式,通过LaSalle 不变集定理构建其耗散区域,当构建的LF 的1 阶导数小于0 时即V̇≤0时,刻画此方法下针对具体工况的估计吸引域。可以发现,在一定程度上Lyapunov 能量函数法的构建思路可以为构建保守性较低的LF 提供一些理论依据与思路。
2.3.2 基于优化数值能量函数的方法
2.3.2.1 TS模糊建模法
由Takagi 和Sugeno 首次提出的TS 模糊建模法[60-62],主要是通过局部的线性特性来表征原非线性系统。当构建的局部线性函数数量足够多时,可将构建的一系列TS 模糊线性模型与原非线性系统模型等效。文献[60]通过TS 模糊建模法建立了局部电力系统控制模型,并指出随着电力系统中的极度不确定性和复杂性增加,传统的数学建模方法已经显得不够灵活和高效。文献[61]对TS 模糊建模方法进行了深入研究,并将其应用于直流供电系统的大信号稳定性分析,提出基于TS 模糊建模方法的直流供电系统稳定性分析,具有较强的鲁棒性和适用性,并为电力系统的稳定性分析和控制提供了一种新的思路和方法。文献[62]则基于TS 模糊建模法构建了系统的LF,为准确判断系统扰动后的暂态稳定性提供了分析工具。
TS 模糊建模法是一种高效的非线性系统分析和控制方法,计算简单,模型结构清晰。当TS 模糊建模法考虑非线性项数量较多时,其复杂性使得TS模糊建模法无法拓展至更高阶非线性系统。
2.3.2.2 平方和规划法
为克服不确定阻尼项构建的不准确吸引域的问题,文献[63]提出了平方和规划(sum of square,SOS)法,并在文献[64-66]中得到应用。SOS 法是一种将非线性多项式方程的正定性问题转化为平方和形式多项式函数问题的方法。文献[64]提出可以将非线性方程问题转化为等价的凸问题,并基于SOS 法约束最优化条件来构建系统的LF 以判断稳定性。文献[65]针对风机接入的系统中故障穿越等复杂暂态问题,通过SOS 法实现了非线性问题的有效处理。另外文献[66]构建了LF,基于SOS 法分析了不同参数对系统暂态稳定的影响。
SOS 法常用于构建较为保守且有效的吸引域,但受多项式次数增多、变量数目多等问题的限制,需不断寻求新的优化求解思路以拓展其在高阶系统中的应用。
2.3.2.3 线性矩阵不等式优化法
线性矩阵不等式(linear matrix inequality,LMI)优化法[5-6,67-68]是基于Lyapunov 稳定性定理,针对非线性多项式动力系统模型构建LEDA 的方法。文献[5-6]中应用了LMI 优化法,构建了系统的PLL-Syn暂态同步稳定域,并应用于构建参数空间下的电流可行域,分析了不同参数对系统暂态稳定的影响。文献[67-68]提出可以将非多项式系统的吸引域估计问题转化为优化问题,从而具有良好的鲁棒性和可扩展性。由于LMI 优化法刻画的LEDA 具有较低的保守性,因此可以帮助设计和优化电力系统的控制策略,从而提高系统的稳定性和可靠性。
2.3.3 直接法的工况应用及其对比分析
综合上述直接法的介绍,以工况4 为例,对直接法的应用与案例进行说明,如图6 所示。图6(a)、(b)分别给出了解析能量函数构建的吸引域和优化数值能量函数构建的吸引域对比结果。为了更加直观对比不同直接法应用效果,图6(c)给出了解析能量函数和优化数值能量函数构建的吸引域对比效果。图中:x1=θpll,x2=∫Vtqdt,x1、x2均为标幺值。根据图6,可得到以下结论。

图6 直接法的应用与案例说明Fig.6 Application and case introduction of direct method
1)由图6(a)比较3种解析能量函数构建的LEDA,基于PEBS 的能量函数法在部分轨迹区域将超出真实吸引域边界,从而造成系统故障后状态的不准确估计;基于LaSalle 不变集的Lyapunov 能量函数法进一步固定了临界能量函数值,避免了这一情况,但会造成LEDA 区域面积的缩小,提高了保守性。为了提升LEDA 的高准确性与低保守性,文献[59]提出的能量函数的一种特殊实现形式在一定程度上有效扩大了LEDA。
2)由图6(b)对比3类数值能量函数构建的吸引域,TS 模糊建模法构建的LEDA 较SOS 法、LMI 优化法小,LMI优化法构建的LEDA则更接近故障后平衡点处的真实吸引域,具有较低的保守性与有效性。并且值得注意的是,基于数值能量函数的TS 模糊建模法、SOS 法、LMI 优化法构建的LEDA 不会造成真实稳定域估计的不准确。
3)将图6(a)、(b)所构建的LEDA 合并为图6(c),从整体上来看,解析能量函数法构建的估计稳定域边界距离真实吸引域边界较远,保守性相对较高;数值能量函数法构建的LEDA 会更接近真实吸引域,保守性相对较低。
但以上结论并非一概论之,数值能量函数如TS模糊建模法,其构建的LEDA 亦会呈现较高的保守性。因此可以根据不同情形下的系统模型以及不同方法适用时存在的优点、局限性,选取合理且适用的分析方法。
3 以VSC 注入有功/无功电流为参数空间的暂态稳定域
针对WG-VSC 系统的PLL-Syn 暂态失稳现象,现有研究大多刻画平衡点的LEDA,以判断系统是否满足暂态同步稳定的要求,并且从状态空间角度出发,通常也只能反映具体的一个运行点的暂态同步稳定信息。但是在实际的运行控制中,更直观或更关心的是从参数空间的角度去分析以VSC注入有功/无功电流为参数空间的暂态稳定域,以保证系统PLL-Syn 暂态稳定,本文定义其为FRC[5-6]。例如,网侧发生严重故障时,如果故障限流控制中有功和无功电流超出有功和无功注入FRC,则并网点电压动态与PLL 动态的相互耦合会导致WG-VSC 系统在LVRT 期间出现PLL-Syn 暂态失稳现象,因此获得该可行域可以作为系统是否出现PLL-Syn 暂态失稳问题的一项重要判据。在此基础上,分析探究故障点电压大小、并网点到故障点的等效阻抗值(即系统等效短路比)、锁相环控制参数等参数对该注入FRC的影响,可以进一步为系统稳定提升提供参数设计支持。因此,如何定义与构建电流可行域对保证WG-VSC 系统在大扰动下的PLL-Syn 暂态稳定至关重要。
文献[46,65]根据平衡点是否存在的条件,建立了注入电流、网侧阻抗与电压的不等式关系,构建了静态稳定条件下的有功和无功注入FRC。然而以上研究都局限于平衡点是否存在,无法作为暂态情形下电流注入稳定边界的判断依据。进而文献[35]基于等面积法则确定了有功和无功注入FRC,从而在可行域范围内可以根据实际情况动态调整系统注入电流以满足电网导则与LVRT的要求[31-38],但此研究并未对FRC 给出明确的概念及清晰的数学定义。文献[5-6]对于以VSC 注入有功/无功电流为参数空间的暂态稳定域展开分析,包括FRC 的概念以及以LMI 优化法构建的LEDA 为基础刻画FRC 的技术方法。因此,接下来将基于LMI 优化法构建的LEDA,综述FRC的定义及其构建方式[5]。
3.1 FRC的定义
有功/无功FRC[6]定义为:保证故障后WG-VSC系统PLL-Syn暂态稳定的d、q轴电流设定值Itd1、Itq1的可行范围。进一步解释为,若系统能从故障前稳定运行的平衡点xe0稳定过渡至平衡点xe1,则此时满足PLL-Syn 暂态稳定时系统对应的有功/无功电流设定值Itd1/Itq1的可行范围即为FRCΩI,如式(1)所示。
式中:Ωv为状态空间可行域,即LEDA;Itd1、Itq1与Im分别为故障后的d、q轴电流设定值与WG-VSC 系统的最大允许电流(下标1表示故障后的系统参数)。
3.2 FRC的构建
由前所述,故障后平衡点处的小扰动稳定是分析大扰动稳定的前提。现假定存在平衡点xe1,故障后系统参数应满足:
由式(2)可知,在给定系统故障后具体参数(XF、RF、VF1)后,欲构建FRC,需首先确定θplle,1的可行范围。基于LMI 优化法构建的LEDA 与LFv(x)可知,若满足式(3)所示约束条件,则系统处于暂态稳定状态,即xe0位于xe1的LEDA内。
θplle,1可 行 区 间 与FRC 的 构 建 示 意 图 如 图7 所示,图中S=v(xe0-xe1)。由图7(a)可知,xe1远离xe0的程度越大,v(xe0-xe1)值越大。因此,当v(xe0-xe1)=1时,系统呈临界稳定状态,此时θpll1的可行范围边界可 被 计 算 确 定 为θpll1∈[θplle,1min,θplle,1max][5-6](θplle,1min、θplle,1max分 别 为θplle,1设 定 的 可 行 范 围 最 小 值 与 最大值)。
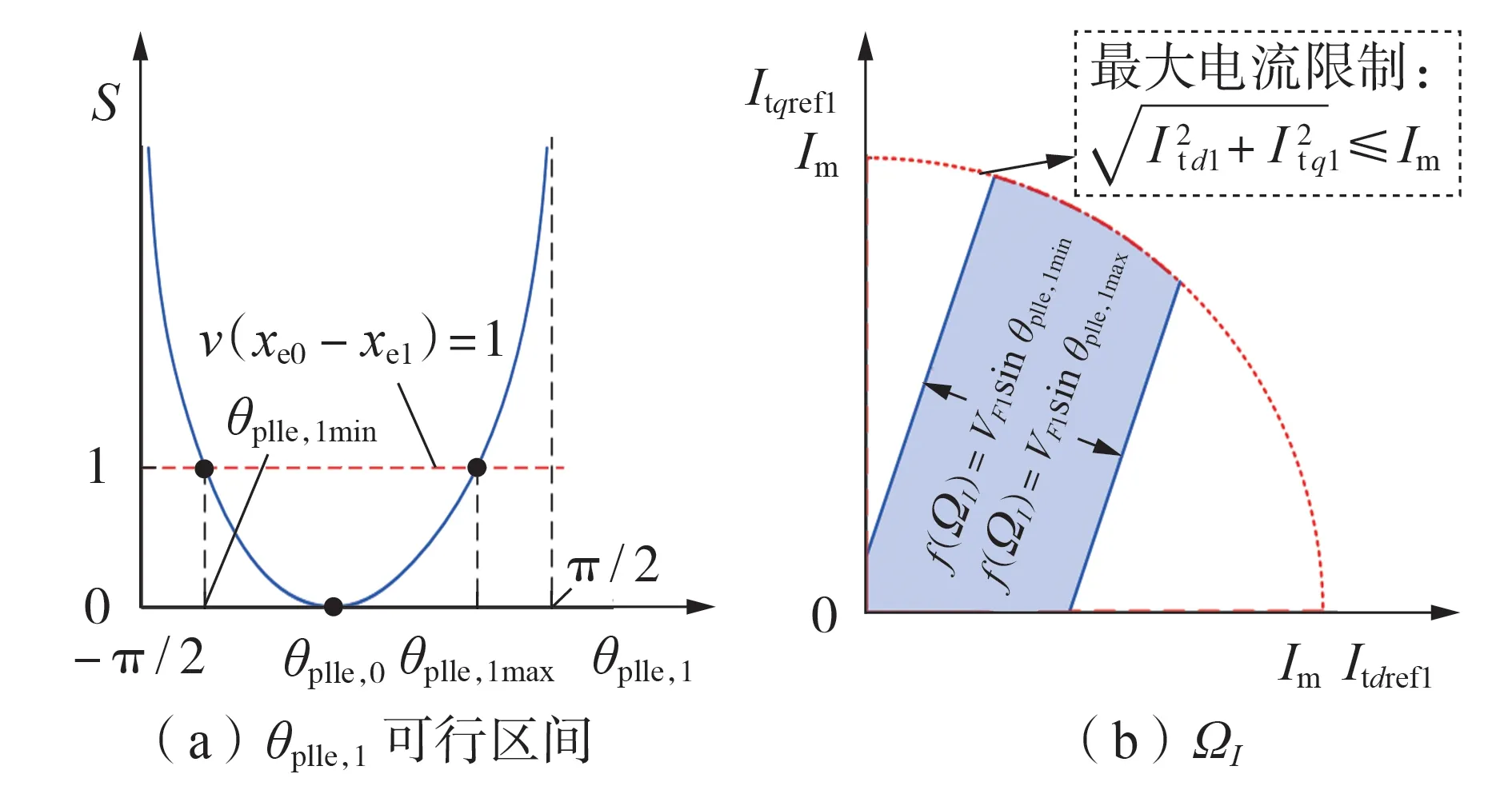
图7 θplle,1可行区间与FRC的构建Fig.7 Feasible region of θplle,1 and construction of FRC
对式(2)进行修正得到式(4),FRC 的示意图如图7(b)所示。
基于以上构建思路与流程,将FRC 的构建流程总结为如下步骤:①输入初始LFv0(x)、故障前PLL相角(θplle,0)、故障后电压(VF1)、电网阻抗(XF1和RF1)、PLL控制参数(kp和ki);②构建故障后平衡点xe1处的LEDA 与迭代后的v(x)[5-6];③令v(x)=1,计算当系统处于临界稳定状态时,PLL 相角的最大值θplle,1max和最小值θplle,1min。
通过以上步骤,即可得到FRC 如式(4)所示,从而可基于参数空间的角度判定系统的暂态同步稳定性,根据系统大扰动后设定的电流值是否位于构建的FRC 稳定边界内来判断系统是否保持暂态同步稳定。以工况4 为例,刻画FRC 与其对应的仿真结果如附录E图E1所示。
另外,文献[5-6]也详细分析了故障点电压大小、并网点到故障点的等效阻抗值(即系统等效短路比)、PLL 控制参数等参数对该注入FRC 的影响,在此不再赘述。
4 PLL-Syn暂态稳定提升方法
为提升电流控制型变换器接入的交流电网系统尤其是故障后的暂态稳定性,现有的PLL-Syn 暂态稳定提升方法主要有动态调整故障后有功/无功注入电流Itd1/Itq1与调整PLL控制特性2类措施,如图8所示。接下来,下面将从上述2 个方面梳理现有研究中所提出的PLL-Syn暂态稳定性提升方法。

图8 暂态稳定提升方法分类Fig.8 Classification methods for transient stability enhancement
4.1 动态调整故障后有功/无功注入电流Itd1/Itq1
4.1.1 根据电网阻抗比改变电流注入相角
为消除锁相环输入电压Vtq中偏移项对系统暂态同步稳定的影响,文献[69]提出,注入与电网阻抗比(R∑/L∑)互为相反数的有功/无功电流注入比(-L∑/R∑)的电流,抵消线路阻抗压降对并网点电压的影响,从而达到恢复静态工作点的效果。该方法基本流程如附录F 图F1 所示。该方法有助于避免系统失步,但需快速测量电网阻抗比,在实际运行过程中实现起来较为困难,同时由于阻抗比恒为定值,使得系统缺乏动态调整能力。
4.1.2 基于锁相环频率输出补偿有功电流Itd1
为消除等效不平衡功率的影响,文献[55,70]提出基于锁相环频率输出补偿有功电流的方法,具体结构如附录F 图F2 所示。基于锁相环输出,将动态过程中的频率变化量反馈至故障后给定的有功电流,即利用PI 环节动态调整有功电流的大小,以恢复系统暂态同步稳定。虽然此方法的实现过程简单、有效,但附加的1阶PI环节使得系统控制更为复杂,如何定量选取比例增益系数亦会影响系统的稳定性。
除上述方法外,我们还可以根据3.1 节FRC 的概念来提升PLL-Syn 暂态稳定。即只要保证故障后WG-VSC 系统有功和无功控制电流参考值位于保证暂态稳定的FRC 内即可。但实际应用中可能会面临如下难点:由于FRC 的求解需要获得WG-VSC 系统并网点至故障点电压的等效阻抗值,而实际发生故障时该阻抗参数比较难获取。一种可行的思路是基于并网等效阻抗的实时估计来获取该参数,提出WG-VSC 系统在故障下的LEDA 和FRC 实时估计方法,这也是未来值得深入研究的工作之一。
4.2 调整锁相环控制特性
4.2.1 直接冻结锁相环控制
为提升WG-VSC 系统的暂态稳定性,在系统故障期间,文献[71]提出冻结锁相环,并直接给定电压定向和电流参考相角,基本结构如附录F 图F3 所示。该方法使得锁相环变为开环系统,虽能提升暂态稳定性,但在故障期间无法跟踪系统相角,且无法确定输出电流的有功及无功分量。
4.2.2 冻结锁相环的积分环节
不同于文献[71]中提出的直接冻结锁相环的策略,为避免在故障期间直接给定电压定向与电流参考相角所带来的不准确问题,文献[31]提出保留锁相环的比例环节,但闭锁锁相环的积分环节的方法,基本结构如附录F 图F4 所示。该方法保留了故障期间的锁相环相角跟踪能力,并避免了2 阶锁相环带来的不利超调。但若故障后不存在静态工作点或电网频率有偏差,则该方法将无法使得系统恢复同步暂态稳定。
4.2.3 基于冻结锁相环积分环节的前馈补偿法
文献[72]在文献[31]所提方法基础上,提出基于冻结锁相环积分环节的前馈补偿法,基本结构如附录F图F5所示。

系统静态工作点是否存在受Vtq中的偏移项影响,因此合适的补偿前馈量ak有利于消除偏移量的影响,从而恢复系统的静态工作点,保证系统的同步暂态稳定。
4.2.4 基于锁相环输出的电压调整
文献[37,73-76]提出基于锁相环输出的电压调整措施,如附录F 图F6 所示。该方法基于锁相环输出的频率变化补偿反馈Vtq中的偏移项,经额外PI 环节,动态调整电压反馈值,以恢复系统暂态同步稳定。该方法可使该系统在大扰动后自动找到平衡点,并具有自适应等效不平衡功率的能力,显著提高了VSC的暂态同步稳定性。
4.2.5 电压归一化的锁相环控制
为补偿故障电压大幅阶跃,不同于补偿Vtq,文献[77]经积分环节消除了动态过程中并网点电压的d轴分量Vtd与基准电压值的不平衡量,如附录F 图F7所示。该方法提升了系统的暂态同步稳定效果,解决了2 阶回路相角超调的问题。但若系统在故障期间不存在平衡点,则仍无法恢复稳定状态。
5 总结与展望
5.1 总结
本文针对单个WG-VSC 系统在对称故障等大扰动下的PLL-Syn 暂态失稳现象,从数学模型、常用PLL-Syn 暂态稳定分析方法、以VSC 注入有功/无功电流为参数空间的暂态稳定域及PLL-Syn 暂态稳定性提升4 个方面,对现有主要研究工作进行了全面综述。通过分析和对比,可得到如下主要结论。
1)在弱连接环境下,直流侧功率大幅阶跃与网侧发生严重短路故障均可能会导致并网变流器的PLL-Syn暂态失稳,而基于线性化的小扰动稳定分析模型与方法无法对其进行分析和解释。
2)针对PLL-Syn 暂态失稳现象的量化分析,现有研究主要可分为基于数值积分的方法与基于能量函数的方法。基于数值积分的方法分析系统PLL暂态稳定的结果将较为直观,但存在无法判定系统运行状态与稳定边界的距离、无法解析表达系统运行状态等问题。针对能量函数法的范畴,数值能量函数法构建的LEDA 一般比解析能量函数法具有更低的保守性,但在揭示系统参数对暂态同步稳定性的影响机理时,解析能量函数法将更具有优势。
3)基于LMI 优化法构建的LEDA 具有较低的保守性。在此基础上,本文首次提出面向PLL-Syn 暂态稳定的FRC 概念和求解方法,理论分析和仿真结果表明了所提方法的有效性,为WG-VSC系统在受到大扰动后的关键控制参数的选择提供了指导依据。
4)提升PLL-Syn 暂态稳定的方法大致可分为动态调整电流注入与动态调整PLL 动态2 类,其中前者的本质是将注入电流调整至本文所提出的FRC,后者是通过改变WG-VSC 系统故障下的暂态特性实现稳定性提升。
5.2 展望
在高比例新能源和高比例电力电子装备以及新型电力系统发展的趋势下,相比于单个WG-VSC 系统在对称故障等大扰动下的PLL-Syn 暂态失稳现象,未来新型电力系统中高比例电力电子装备所面临的PLL-Syn 暂态失稳现象甚至其他类型的暂态失稳现象会更加复杂。针对该方向,未来可值得深入研究的工作包括但不限于如下方面。
1)多WG-VSC 并联系统的PLL-Syn 暂态稳定性研究。
现有文献大多集中于设备层面的暂态稳定性研究,仅有少量文献探讨了多WG-VSC 并联系统的PLL-Syn 稳定性,且集中于静态稳定分析[78]、小扰动稳定分析[79-81]和机理揭示[71,82-83]方面。考虑多变流器之间的动态交互作用,通常使得非线性程度大幅增加,从而存在对多WG-VSC 并联系统在对称故障下的暂态同步稳定特性的定量分析研究不足。另外,若考虑非对称故障下的正序控制动态耦合等因素,文献[81]指出多WG-VSC 并联系统的暂态同步稳定问题会更为复杂。因而未来的研究应更多关注多WG-VSC 并联系统的PLL-Syn 暂态稳定问题,更深入地探讨电力电子化电力系统的暂态同步稳定问题。
2)WG-VSC 系统在不对称故障下的PLL-Syn 暂态稳定性研究。
不对称故障下,正序锁相环、正序网络、负序锁相环、负序网络及序耦合之间相互影响,WG-VSC 系统的PLL-Syn 动态更加复杂。现有文献大多忽略序耦合的影响,并在此基础上探讨了系统静态稳定[33,84]和PLL-Syn 暂态稳定[20,85-86]的条件。而现有文献考虑序耦合的研究也主要聚焦于系统小扰动稳定分析[87-88],平衡点附近线性化的方法无法解决系统在大扰动问题下的全局暂态同步问题。进而在计及不对称故障下的情形以及大扰动稳定问题的研究中,正负序耦合对系统PLL-Syn 暂态稳定性的影响知之甚少,计及序耦合影响的PLL-Syn 暂态稳定量化评估手段匮乏。因而未来的研究亦应进一步深入关注WG-VSC 系统在非对称故障期间的暂态稳定机理分析与量化评估问题。
3)WG-VSC 系统在电压源虚拟同步或构网控制下的暂态同步稳定性研究。
故障穿越期间,由于构网型变流器的电压源特性可能引发的过流问题,构网型变流器常需要限流或切换至PLL-Syn模式下运行[89-90],这为其暂态稳定分析带来了新的挑战[10,91]。基于此,现有的研究从考虑限流与无功外环控制动态的角度,从机理解释与量化分析2 个角度,研究了限流控制措施与不同形式的无功外环控制对系统同步特性的影响[92-97]。然而仍缺乏同时考虑故障穿越期间两者对系统同步稳定性影响的研究,优化构网变流器的故障穿越策略以获得更好的暂态同步稳定性仍待深入探讨。另外现有研究基于机理与分析方法的角度探讨了“跟网-构网”混联系统的暂态同步稳定性[98-100],但缺乏考虑了计及变流器间的动态交互确定构网变流器的合理占比的有关理论与技术研究。因此未来的研究应更为深入,包括且不限于以上含虚拟同步或构网控制下的暂态同步稳定性研究。
4)不同锁相环对WG-VSC 系统的PLL-Syn 暂态同步稳定影响研究。
现有研究中,本文所综述的锁相环作为主流同步方法接入WG-VSC 系统。随着高比例新能源的不断渗透,为不断提升锁相环的动态特性,近些年不少学者在此基础上额外附加控制环节,衍生了一系列改进锁相环[101-103],包括基于滑动平均滤波器的锁相环(moving average filter-based PLL,MAF-PLL)、基于二阶广义积分的锁相环(second-order generalized integrator-based PLL,SOGI-PLL)、基于比例与校正环节的锁相环等。文献[101]基于MAF-PLL,提出了改进锁相环控制结构,将PI 控制环节替换为比例-积分-微分(proportional integral derivative,PID)控制环节,维持了锁相环的滤波能力,提升了动态响应能力。文献[102]提出了SOGI-PLL 的控制结构,较好地跟踪了电网电压相角信息,提升了系统暂态稳定裕度。文献[103]提出了基于比例与校正环节的锁相环,将锁相环中的PI 控制环节替换为比例环节与滞后/超前控制环节,缩短了系统动态响应时间并增强了系统暂态稳定裕度。然而,基于不同类型的PLL-Syn 控制方式接入WG-VSC 系统后的暂态同步稳定问题尚未得到广泛关注。因此本文综述的系统暂态失稳机理、暂态稳定分析方法、状态空间与参数空间可行域及暂态稳定提升方法对于基于不同PLL-Syn方式的WG-VSC系统是否可以拓展应用,未来值得进一步探讨和研究。
附录见本刊网络版(http://www.epae.cn)。
猜你喜欢
大电机技术(2021年5期)2021-11-04
烟台果树(2019年1期)2019-01-28
电子测试(2018年14期)2018-09-26
传媒评论(2018年7期)2018-09-18
电子制作(2018年14期)2018-08-21
电测与仪表(2017年24期)2017-12-19
电子测试(2017年23期)2017-04-04
IT时代周刊(2015年7期)2015-11-11
电测与仪表(2015年9期)2015-04-09
散文百家(2014年11期)2014-08-21
