基于改进遗传算法的电动拖拉机复合电源优化控制策略研究
2023-09-10 07:12:36余强李雪妍潘信佳何雄林范文涛王芳王玉
智能化农业装备学报(中英文) 2023年3期
余强,李雪妍,潘信佳,何雄林,范文涛,王芳,王玉
(1. 中国农业大学信息与电气工程学院,北京市,100083;2. 国网黑龙江省电力有限公司,黑龙江哈尔滨,150000)
0 引言
2020 年9 月,我国正式向全世界承诺2030 年实现碳达峰、2060 年实现碳中和目标[1]。随着国家“双碳”战略目标的提出,降碳成为社会各个行业面临的新挑战。作为农业大国,长期以来我国传统农业机械大多采用内燃机作为动力源。截至2021 年底,我国农机总动力达1.078×109kW,柴油发动机动力占比77%[2],高比例的传统农机的投入使用在伴随大量石油消耗的同时也产生了大量的碳排放,给环境造成了严重污染,在碳达峰、碳中和大背景下,农机“减碳”,电动化势在必行。相比于传统农用机械,电动农业机械不仅具有控制灵活、结构简洁、工作噪音小和维护成本低等优点,而且能量利用率要远高于传统农机,且符合绿色环保、低碳经济发展的要求,是全球农业机械未来的发展方向[3]。然而现阶段电动农机在技术上也存在一些急需解决的问题,其中,电动农机的动力来源主要来自于配备的蓄电池,但目前研发制造的蓄电池比功率和比能量难以满足电动农用机械复杂的作业要求[4],例如约翰迪尔公司开发的SESAM 电动拖拉机,其最大功率为265 kW,但仅可持续工作4 h,大大降低了其工作效率[5]。除此以外,相比于电动汽车相对稳定的功率输出,电动农机运行工况复杂多变,常常伴随大电流的输出,这严重影响了蓄电池的寿命[6]。在此背景下,在研发高比功率电池的同时,挑选一种储能装置来承担电动农机瞬时过载、大电流等特殊工况,来保证整个储能系统的安全稳定运行成为当下需要解决的重点问题。在所有储能装置中,超级电容功率密度大,且循环使用寿命长,因此将超级电容器应用到电动拖拉机上跟蓄电池组成复合电源系统成为当前电动农机的一种解决方案[7]。针对蓄电池和超级电容器组成的复合电源,提出高效的能量管理策略逐渐成为当前的研究重点。
现阶段国内外针对电动拖拉机复合电源能量管理方法的研究通常可以分为基于规则和基于优化两种方法,刘孟楠等[8]针对采用超级电容器作为辅助电源的电动拖拉机,制定了基于功率分配的能量管理策略,将蓄电池电功率抑制在载荷波动基频附近并平衡峰值功率。李银平等[9]采用动态规划方法,对由超级电容器和蓄电池组成的拖拉机复合电源的控制策略进行了优化,有效降低了系统的能量消耗。TRITSCHLER等[10]基于采用燃料电池作为辅助动力源的电动拖拉机复合电源系统,制定了3 种能量管理策略(基于规则策略、滑翔平均策略、等效最小氢耗策略),仿真结果表明3 种能量管理策略均能有效提高氢气利用效率,其中等效最小氢耗策略的效果更为显著。BARTHEL 等[11]以混合动力电动拖拉机燃料最低消耗为研究目标,设计了一种基于优化内燃机负载点偏移的能量管理策略,有效提高了运输工况时的能量利用效率。尽管以上研究均通过制定电源能量管理策略有效降低了系统的能量消耗,但大多均未考虑抑制电动拖拉机作业过程中蓄电池的大电流放电,从而延长蓄电池的使用寿命。
本文以基于超级电容辅能的复合电源电动拖拉机为研究对象,根据电动拖拉机负荷特性及复合电源放电特性制定模糊控制策略,并以蓄电池峰值电流最低为优化目标,采用改进遗传算法对模糊控制参数进行优化,最后通过仿真试验验证能量控制策略的有效性。
1 电动拖拉机电源结构及作业工况
1.1 复合电源拓扑结构及对比
电动拖拉机电源系统在作业工况发生变换时会切换运行模式导致蓄电池产生瞬时大电流,从而影响电池的使用寿命。由超级电容器和蓄电池构成的复合电源系统可以利用超级电容瞬时充放电的特性降低在大功率输出和能量回收时蓄电池受到的大电流冲击,延长蓄电池的使用寿命。
复合电源系统的拓扑结构决定了蓄电池和超级电容的充放电形式,能够在很大程度上影响电源系统的整体性能,因此首先确定复合电源系统的拓扑结构。依据蓄电池、超级电容和DC/DC 变换器的连接方式,复合电源系统的拓扑结构可分为4 种[12],如图1 所示。

图1 复合电源拓扑结构Figure 1 Topology of dual-source energy storage system
其中蓄电池与超级电容直接并联的拓扑结构较为简单,能够保证蓄电池和超级电容输出到总线的电压一致,但削弱了超级电容均衡负载的主动性;蓄电池与超级电容分别与DC/DC 变换器串联再进行并联的拓扑结构主动性强、灵活性高,但结构复杂且成本较高,同时会大大增加控制策略的设计难度;而蓄电池串联DC/DC 变换器再与超级电容并联的拓扑结构可以实现蓄电池的主动控制,但无法调节超级电容的电压从而均衡负载;超级电容串联DC/DC 变换器再与蓄电池并联的拓扑结构能够充分发挥超级电容的主动性,保证蓄电池与超级电容的电压一致[13]。
综合考虑电动拖拉机控制策略的难度与精度、超级电容器的负载均衡力以及结构成本等因素,本文选择超级电容串联DC/DC 变换器再与蓄电池并联的拓扑结构。
1.2 电动拖拉机作业工况
拖拉机通过配置不同的农机具可以进行包含运输、旋耕、犁耕等在内的多种作业。不同的作业工况下电动拖拉机需求功率的大小不同。其中运输工况的需求功率计算如式(1)所示[14]。
式中:P1——拖拉机运输工况下的需求功率,kW;
V1——拖拉机行驶速度,km/h;
Fa1——拖拉机行驶时的土壤摩擦阻力,N;
Fb1——拖拉机加速时的土壤摩擦阻力,N;
Pα——驱动轮滑转时的功率损失,kW;
Pβ——机械传动损失,kW;
f——驱动轮的滚动阻力系数;
ma——电动拖拉机运输时的整车质量,kg;
g——重力加速度,N/kg;
θ——电动拖拉机旋转质量换算系数;
旋耕工况的需求功率计算如式(2)所示[15]。
式中:P2——拖拉机旋耕工况下的需求功率,kW;
Fa2——拖拉机旋耕工况下的土壤摩擦阻力,N;
V2——拖拉机旋耕作业速度,km/h;
Fb2——旋耕牵引阻力,N;
α——旋耕作业的深度,cm;
β——旋耕作业的耕宽,cm;
K——比例系数;
K1——旋耕作业时的比阻,N/m2;
mb——拖拉机旋耕作业时的整备质量,kg。
犁耕工况的需求功率计算如式(3)所示[16]。
式中:P3——拖拉机犁耕工况下的需求功率,kW;
Fa3——电动拖拉机犁具牵引阻力,N;
λ——拖拉机犁耕作业时的阻力系数;
G——犁体重力,N;
K2——静态阻力系数,N/cm2;
c——单犁体耕深,cm;
d——单犁体耕宽,cm;
γ——动态阻力系数;
V3——拖拉机犁耕作业速度,km/h;
mc——拖拉机犁耕作业时的整备质量,kg。
由于目前拖拉机暂未具备标准的测试工况,考虑到丘陵山地作业拖拉机需多次上下坡,速度变化较为频繁,制动踏板时产生能量回收,同时为了测试复合电源能量控制策略处理峰值电流的能力,因此考虑从目前常用的电动汽车标准测试工况中选择速度变化频繁且急剧的NEDC 工况进行降速处理,使其满足电动拖拉机实际作业情况,最后根据以上公式得到作业时间内电机需求功率变化区间,本文设定待测试工况需求功率变化曲线如图2 所示。

图2 待测试工况Figure 2 Working condition to be tested
2 复合电源模型
电动拖拉机复合电源系统主要由蓄电池、超级电容器和DC/DC 变换器组成,根据电动拖拉机作业特性需要搭建合适的复合电源模型,从而保证能量控制策略的有效性。
2.1 蓄电池模型
蓄电池模型属于一种复杂的非线性系统,包括电路模型、电化学模型、热力学模型等,为了便于建立电池模型,采用Rint 模型[17]。
电流计算模块计算公式如式(4)。
式中:Iout——蓄电池放电电流,A;
Voc——蓄电池开路电压,V;
R——蓄电池内阻,Ω;
P——电池输出功率,kW;
Vmax——蓄电池最大电压,V;
Iin——蓄电池充电电流,A;
Iave——蓄电池平均电流,可表征蓄电池在工作时间内充放电电流的整体大小情况,A;
ibat——蓄电池实时电流,当其为正时,蓄电池放电,为负时蓄电池充电,A;
T——待测试工况运行时间,s;
ess_max_volts——蓄电池单体最大电压,V;
ess_module_num——蓄电池单体个数。
SOC 估算模块计算公式如式(5)。
式中:max_cap——蓄电池最大容量,Ah;
Ah_used——蓄电池已使用电量,Ah;
SOCinit——蓄电池初始荷电状态;
SOCbat——蓄电池实时荷电状态。
2.2 超级电容模型
本文采用超级电容RC 模型[18],该种模型能够在保证精度要求的同时便于计算,其主要计算公式如式(6)、式(7)。
开路电压计算公式
式中:USC——超级电容开路电压,V;
QSC——超级电容存储容量,C;
C——超级电容理想电容,F;
ISC——超级电容电流,A。
SOC 估算模块
式中:SOCSC——超级电容荷电状态;
USCmax——超级电容最大电压,V;
USCmin——超级电容最小电压,V。
2.3 DC/DC 变换器模型
DC/DC 变换器目前主要分为电气模型和效率模型两种,由于电气模型的搭建较为复杂,为了便于计算,本文采用文献[19]中已经经过验证的效率模型,并通过二维插值表来表示电压比值、超级电容功率与DC/DC 变换器转换效率的关系。
2.4 温度模型
蓄电池的产热、散热过程是一个典型的有时变内热源的非稳态导热过程,目前已有较多成熟的模型发表,本文采用仿真软件ADVISOR 中自带的温度变化模型[20],模型内部结构如图3 所示。
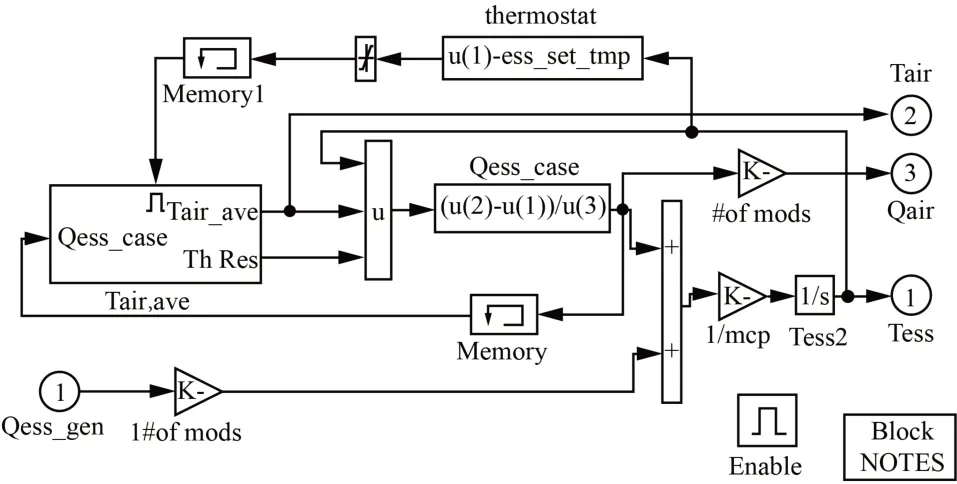
图3 温度模型Figure 3 Temperature model
基于1.1 节中复合电源拓扑结构及上述建模思想在仿真软件中建立起复合电源仿真模型。
3 复合电源控制策略
3.1 模糊控制策略
本文采用的模糊控制策略无需建立控制系统的数学模型,能够实现对电动拖拉机复合电源系统的非线性控制,具备良好的适应性和容错性,其基本原理如图4 所示。

图4 模糊控制基本原理图Figure 4 Basic schematic diagram of fuzzy controller
本文设计的模糊控制器采用3 个输入(蓄电池SOC、超级电容SOC、电机需求功率),1 个输出的结构(超级电容输出功率在复合电源可提供功率中的占比),模糊控制器推理方法采用Mamdani 推理方法[21],蓄电池和超级电容之间的功率分配关系如式(8)。
式中:Preq——电机需求功率,kW;
Pbat——蓄电池应提供功率,kW;
Puc——超级电容应提供功率,kW;
Kbat——蓄电池功率分配因子;
Kuc——超级电容功率分配因子。
为了兼顾控制系统的稳定性和灵敏度,本文采用正态分布型隶属函数以及三角型隶属函数作为模糊控制器的隶属度函数。
正态分布型隶属函数
三角型隶属函数
由于过充或过放均会影响蓄电池和超级电容的使用寿命,影响复合电源系统的安全运行,因此需将两者的SOC值限定在一定的区间内。
本文设定蓄电池SOC的论域为[0.2,0.9],对应的模糊集合为[NS,NM,NB],分别表示[低,中,高];超级电容SOC的论域为[0.2,1],对应模糊集合[NS,NM,NB],分别表示[低,中,高];电机需求功率Preq的论域为[0,1],对应的模糊集合为[T,S,M,B,H],分别代表{很小,较小,正中,较大,很大};输出量Kuc的论域为[0,1],对应的模糊集合为[T,S,M,B,H],分别代表{很小,较小,正中,较大,很大}。
在复合电源放电情况下模糊控制规则的指定上,考虑当电机需求功率较小或者适中且蓄电池储能充足时,主要由蓄电池提供能量;当电池储能不足时,则由超级电容输出主要能量;当蓄电池及超级电容均储能较低时,由超级电容辅助供电。当电机需求功率较大且超级电容及蓄电池均储能充足时,由两者同时提供能量,其中超级电容提供峰值功率。能量回收情况下考虑由超级电容回收绝大多数能量,以保证复合电源的工作频率。
基于以上设计思想,制定各输入输出变量的隶属度函数,具体表现如图5 所示。

图5 模糊控制隶属度函数Figure 5 Fuzzy controls membership function
模糊规则如表1 所示,其中SOCc为蓄电池SOC,SOCb为超级电容SOC。

表1 模糊控制规则表Table 1 Fuzzy control rule table
3.2 模糊控制算法优化问题
模糊控制规则和隶属度函数在很大程度上能够决定控制策略的性能,因此,对模糊控制规则进行调整和优化是非常重要的。相较于其他传统的单点搜索方法,容易在搜索多峰分布的搜索空间时找到局部最优极点,遗传算法的群体搜索特性可以很好的实现并行化搜索从而具备较好的全局搜索性。因此采用遗传算法对模糊控制规则进行优化,解决模糊控制策略基于专家经验而具有很强主观性的问题,实现其最优控制。具体步骤为在隶属度函数的形状和输入输出变量参数已确定的基础上,将初始制定的控制规则表按照一定次序形成一维表并进行二进制编码,最后通过遗传算法对模糊控制规则进行优化,优化的过程如图6所示。
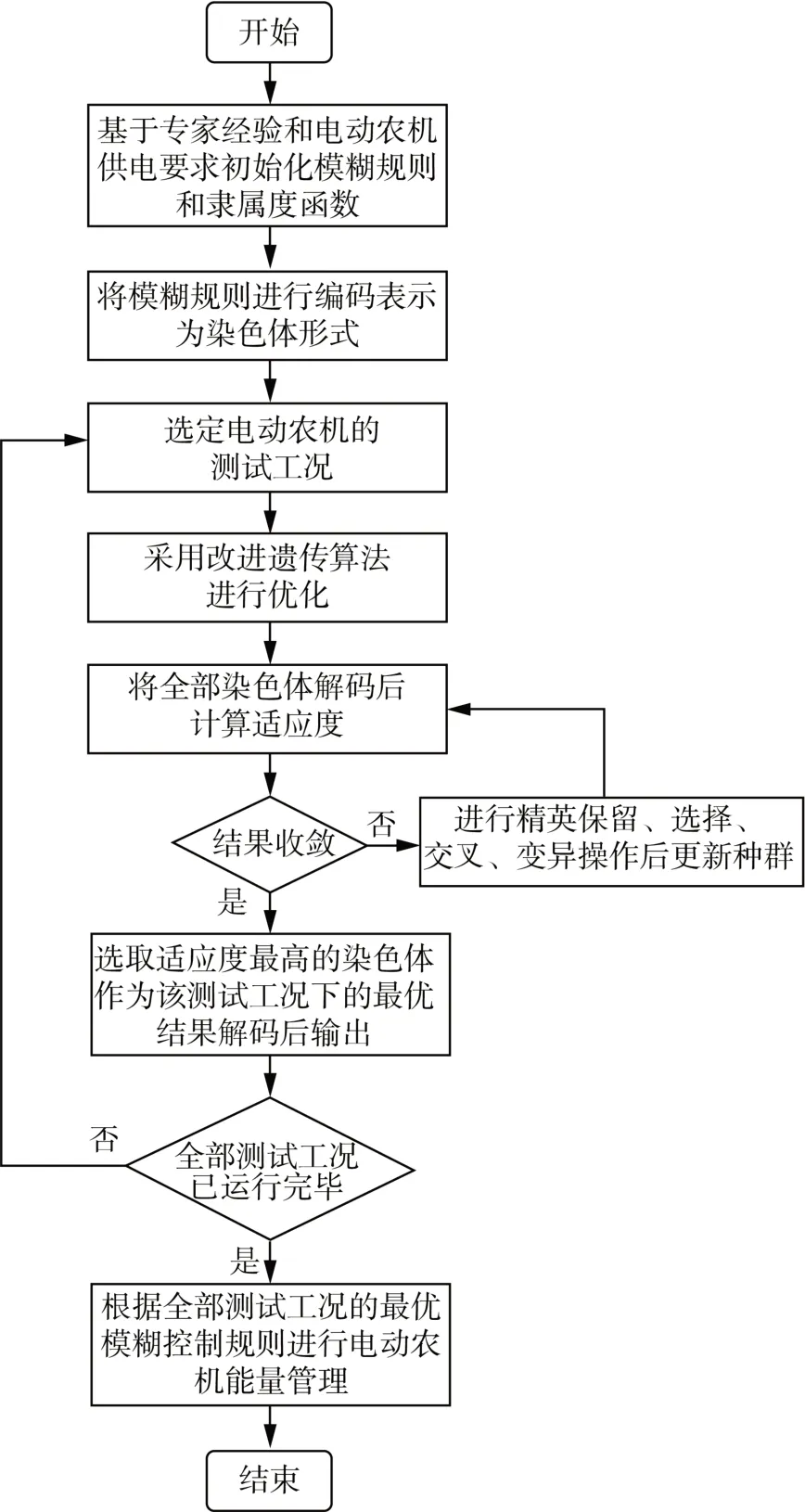
图6 优化流程图Figure 6 Flowchart of genetic algorithm optimization
为了尽可能地降低蓄电池的能量消耗、提高蓄电池的续航能力,选择在初始种群筛选阶段以蓄电池的能量消耗作为目标函数,将蓄电池能量消耗较少的部分个体作为初始种群
式中:SOCbat_last——复合电源结束工作时蓄电池剩余的SOC 值。
从式(11)可以看出,需要优化的目标函数值越大,结果越优。
在遗传进化阶段,则要求在蓄电池能量消耗较少的基础上尽可能减小在大功率放电时的电流,从而降低电池发热损耗、延长其使用寿命,因此选择蓄电池最大功率时的放电电流作为目标函数
式中:Imax——蓄电池工作过程中最大功率放电时的电流,可以看出需要优化的目标函数值越大,结果越优。
3.3 改进传统遗传算法
由于传统遗传算法在选择操作中存在统计误差,可能会出现错误反应个体适应度的选择,从而导致适应度高的个体也被淘汰掉;交叉、变异算子有可能导致当前种群中的最优适应度个体在下一代群体中发生丢失,最终导致算法不能全局收敛,因此对传统的遗传算法进行了部分改进。
在算法的设计过程中,采取了精英保留策略,即把种群进化中迄今产生的最优个体不进行配对交叉而是直接复制到下一代中,同时为了保证群体规模不变,将精英个体同时也加入到下一代群体时,并淘汰掉下一代群体中的最差个体。
3.4 算法参数设计
初始种群生成的过程中需要分别计算种群中个体的适应度值,并进行排序,去掉适应度差的n个个体,将剩下的m减n个个体作为初始种群。
当m取值过大时,会降低算法的速度;而m的值过小时,有可能会导致算法过早收敛,通常m取值为20~100,n取20~50。经过综合考虑算法的计算精度及速度。取m=100,n=50。
选择操作有多种方法,本文采用最为经典的轮盘赌法,该方法中个体的选择概率和适应度值成比例。交叉操作将父代的染色体通过交叉组合的方式生成新个体,交叉概率通常取值为0.4~0.99,本文选取为0.7。
最后在运行参数的选取上,终止代数表示遗传算法运行状态参数,当遗传算法运行到终止代数后就会停止运行,从当前所有群体中选择最优作为最终输出结果。一般情况下终止代数的取值范围为50~200。在本文中,取终止代数为60。
采用以上改进后的遗传算法后对模糊控制规则进行了重新优化。
3.5 逻辑门限值控制策略
逻辑门限值控制策略主要依据电动拖拉机对复合电源系统的功率需求大小以及超级电容SOC水平进行功率分配,由电池提供平均功率,超级电容主要负责电动拖拉机启动或进行犁耕时的峰值功率,从而避免电池大电流放电。
基于以上的思路,将待测试工况的平均需求功率Pave及超级电容的SOC作为划分依据,其中对待测试工况的需求功率进行积分,并计算所消耗时间,二者的比值即为该测试工况下的平均功率。
根据需求功率Preq的正负将复合电源系统工作模式分为充、放电两种状态。
1)当Preq>0 时。
①若电机需求功率小于待测试工况平均需求功率,即
该情况下电动拖拉机一般处于运输、旋耕等工况,电机对复合电源系统的需求功率较低,蓄电池可以单独完成需求功率的供给,即
②若电机需求功率大于待测试工况平均需求功率,即
该情况下电动拖拉机一般处于启动或犁耕等工况,电机对复合电源系统的需求功率较高,此时根据超级电容SOC值分为两种情况。
①当超级电容SOC大于0.2 时,此时超级电容具备提供峰值功率的能力,可以辅助蓄电池进行功率输出,所以此时需求功率由蓄电池和超级电容共同提供,即
②当超级电容SOC小于0.2 时,说明超级电容能量储存不足以提供峰值功率,此时需求功率完全由蓄电池承担,即
2)当Preq<0 时。
此时电动拖拉机正处于能量回收工况,此时根据超级电容SOC存在两种分配方式。
①当超级电容SOC小于1 时,由超级电容吸收这部分能量,从而保证足够的电量辅助蓄电池提供峰值需求功率。即
②当超级电容SOC等于1 时,超级电容能量已经充足,将回收能量分配给蓄电池吸收。
具体的逻辑门限值控制策略原理,如图7所示。

图7 逻辑门限值控制策略原理图Figure 7 Schematic of the logic threshold control strategy
4 仿真结果分析
为进一步验证基于遗传算法优化的电动拖拉机复合电源控制策略的优势,本节对以上控制策略分别仿真,试验结果如图8~图10 及表2 所示。

表2 蓄电池电流对比表Table 2 Battery current comparison table
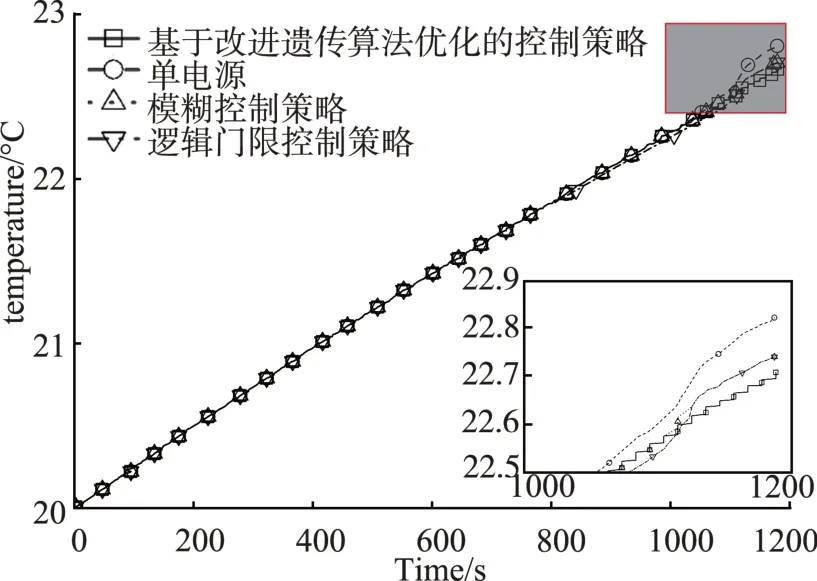
图8 蓄电池温度变化曲线Figure 8 Variation curve of battery temperature
由图8、图9 可以看出,在仿真刚开始阶段曲线变化基本一致,这是由于此时电机需求功率较小、蓄电池电量充足可以单独供能,复合电源并未投入工作;仿真后期阶段,曲线开始有明显区别,这是因为电机需求功率逐渐增大且蓄电池电量有所降低,复合电源开始投入工作,体现出各控制策略的性能差异。可以看到1 100s 前采用逻辑门限控制策略的蓄电池温度及SOC表现均优于其他3 种策略,但1 100s 后,采用改进遗传算法优化的控制策略的蓄电池温度逐渐降至最低、蓄电池SOC逐渐高于其他3 种控制策略。这是由于逻辑门限控制策略下的超级电容在前期过度放电,后期电机最大需求功率出现时超级电容储能已经不足、难以继续辅助供能,导致蓄电池在大电流放电的同时温度上升、SOC下降,曲线出现明显拐点;不难发现,相较于优化前的模糊控制策略,采用改进遗传算法优化的模糊控制策略在性能上有明显提升。
综上所述,以上两种曲线的一致性可以反应出基于改进遗传算法优化的模糊控制策略在分配复合电源需求功率上具有更强的灵活性,且对于电动拖拉机变化复杂的运行工况具有更强的适应性。
由图10 电流变化可知,仿真刚开始阶段各控制策略下的蓄电池电流曲线与蓄电池单独工作情况下的基本一致,原因如上文分析,此时复合电源系统暂未投入工作。同样在仿真时间1 100s 以前随着电机需求功率的增大,各控制策略下的蓄电池峰值电流相较于单电源情况均有所下降,其中逻辑门限控制策略下的蓄电池峰值电流最低,这是由于此时该控制策略下的超级电容放电最多。
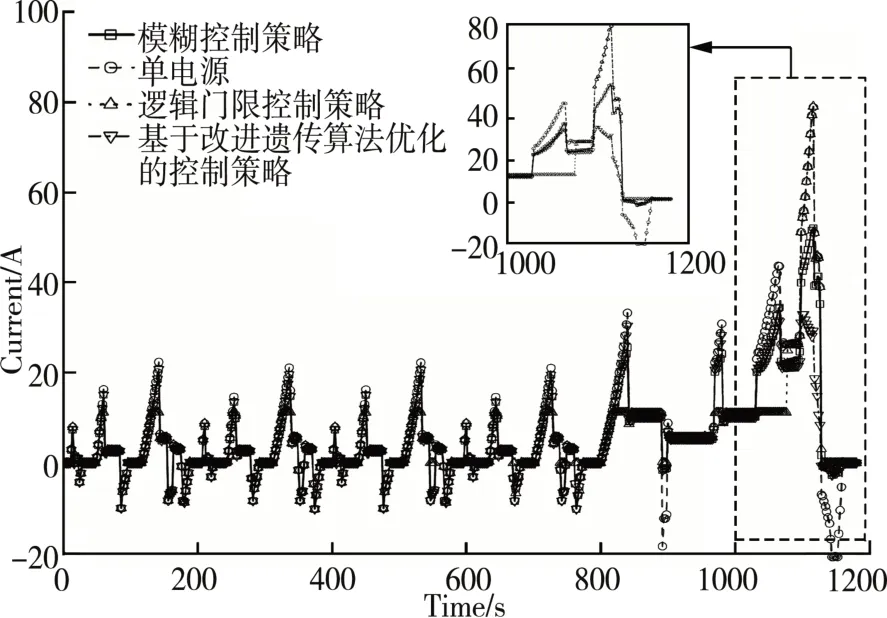
图10 蓄电池电流变化曲线Figure 10 Variation curve of battery current
在仿真时间1 100s 以后即电机的最大功率点附近,由于采用逻辑门限控制策略的复合电源系统超级电容储能接近最低值,复合电源系统已停止工作,因此放电电流与单电源情况几乎一致、产生大电流放电。
蓄电池电流对比表如表2 所示。但是采用基于改进遗传算法优化的控制策略的蓄电池放电电流有着明显下降,控制效果明显。与采用单电源、逻辑门限控制策略、模糊控制策略对比,优化后的蓄电池最大电流分别降低了63%、62.9%及43.9%,平均电流分别降低了24.8%、3.2%及8.5%。
通过仿真结果分析,可以看出基于改进遗传算法优化的模糊控制策略在适应电动拖拉机复杂工况、降低蓄电池大功率放电时的电流、延长蓄电池使用寿命上优势明显。
5 结论
1)通过对电动拖拉机作业工况特性进行分析,选择了复合电源系统拓扑结构及测试工况,并搭建了复合电源相关结构模型。
2)根据电动拖拉机复合电源系统的充放电需求制定了模糊控制策略,并以蓄电池大功率放电时的电流最低为优化目标,采用改进后的遗传算法对模糊控制参数进行了优化。
3)将改进遗传算法优化后的模糊控制策略进行建模仿真,结果表明该方法的优化结果优于逻辑门限值控制策略下计算的蓄电池最大电流60%左右,并且比优化前的模糊控制策略下的蓄电池最大电流减少40%以上。证明了该控制策略在降低蓄电池大电流放电上的有效性。
猜你喜欢
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18 05:14:00
小学生导刊(2017年15期)2017-05-17 05:44:08
汽车维修与保养(2017年1期)2017-05-15 02:40:16
小布老虎(2016年12期)2016-12-01 05:47:00
汽车维修与保养(2016年1期)2016-09-07 08:33:04
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
汽车维修与保养(2016年12期)2016-03-14 06:37:10
汽车维修与保养(2016年11期)2016-02-21 08:04:06