基于计算机视觉的种子分布信息检测关键技术研究现状与趋势
2023-09-10 07:12:44高振卢彩云李洪文何进王庆杰郭朝阳
智能化农业装备学报(中英文) 2023年3期
高振,卢彩云*,李洪文,何进,王庆杰,郭朝阳
(1. 中国农业大学工学院,北京市,100083;2. 农业农村部河北北部耕地保育科学观测实验站,北京市,100083)
0 引言
播种作为农业生产中的重要环节,播种质量直接影响玉米产量,保证播种时的粒距一致性和播深一致性有助于提高播种质量,发挥群体增产优势。随着精准农业的推广和精密播种技术的发展,精密播种已经成为现代农业播种技术体系的主要组成部分[1-2]。精密播种技术能够通过精准控制种子的位置、数量和深度等因素,提高种子发芽率和生长率,从而提高作物的产量和质量[3]。
对播种机播种质量进行实时检测,并在出现问题后及时采取补救措施,是提高播种质量的有效手段,因此播种质量的精准检测是实现精准播种的基础和关键。准确检测播后土壤中的种子分布信息能够在作物生长最初阶段获取位置分布信息,为播种质量检测、定深定位施肥、田间除草和收获等提供基础数据[4-6],是实现作物生长全过程精准高效管理的重要前提。为评估播种质量,国际标准化组织(ISO)制定了标准测试方法ISO 72561(1984)。该方法规定,播种质量主要包括粒距合格指数、粒距变异系数等[7]。粒距是计算粒距合格指数,粒距变异系数,判断重播、漏播的基础参数,对粒距准确检测是评估播种质量的关键。
目前粒距检测常用的方式是将传感器布置在导种管同一截面的不同位置,种子通过监测区域时会遮挡光线,传感器通过监测该区域的电信号变化,实现种子检测。主要的传感器类型有光电传感器、电容传感器、压电传感器和声学传感器等。其中,光电传感器成本较低、安装方便而得到广泛应用,但存在灰尘和落种冲击的敏感性限制,准确性有待提高[8-9]。电容式传感器简单经济,易于维护,能够进行非接触式的实时测量,但抗干扰能力弱,性能不稳定[10-11]。声学传感器和压电传感器目前仍处于试验研究阶段,在实际播种作业中应用较少[12-13]。
计算机视觉是一门交叉学科,涵盖了多个领域,旨在使计算机系统能够理解和识别视觉信息,其核心任务是从图像和视频数据中提取有意义的信息,并进行分析和解释[14]。计算机视觉技术可以在不接触检测对象的情况下进行检测,避免了传感器可能引入的干扰,且可以实现像素级别的测量和检测,相比于其他传感器的测量方式更为精确,可以提供更加准确的数据。更重要的是,计算机视觉技术可以同时检测多种参数,如颜色、形状、大小等,而其他传感器往往只能检测单一参数。随着计算机视觉技术的不断发展,国内外学者开始探讨将计算机视觉技术用于粒距检测中。
本文综述了近年来计算机视觉技术在种子粒距信息检测方面的应用,介绍了该技术的应用场景、硬件系统及检测算法,并针对现状对基于计算机视觉的种子粒距信息检测技术未来发展进行了展望。
1 计算机视觉技术在粒距检测中的应用概述
计算机视觉检测的基本原理如图1 所示[15],主要由计算机、相机和图像识别算法等软硬件系统组成[16]。相机和计算机是主要的功能部件,相机负责图像采集,计算机是图像识别算法载体,负责图像识别算法执行。为实现不同的检测功能,计算机视觉技术所用的相机类型不同,应用场景和图像识别算法也存在差异。

图1 计算机视觉检测原理Figure 1 Principle of computer vision detection
1.1 计算机视觉技术中的相机类型
相机是计算机视觉检测系统中的主要功能部件,是图像采集的执行部件,根据不同功能需求和应用场景,目前在精密播种领域应用较多的主要有快速检测的普通相机、拍摄快速运动目标的高速摄像机及大面积种子出苗率检测的无人机。
1.1.1 普通相机
普通相机采集帧率较低,处理器所需要处理的图像数量少,检测速度快。因此,在实际播种作业过程中,普通相机的应用较为广泛。然而,由于机械振动以及种子与相机之间的相对运动等原因,普通相机虽然能检测到种子,但难以实现对种子破损率和种子姿态等功能的检测。董文浩等[17]利用UVC 高清摄像头,针对低播量的杂交稻设计了一种播种性能检测与播种量实时调控装置,播种量检测的平均准确率可达到98.13%。杨洋等[18]通过安装在田间自走机器人上的CMOS 机器视觉摄像头采集花生出苗图像信息,采用机器视觉方法获取图像中花生苗的数量和花生苗中心点坐标位置,试验结果表明,花生苗数量检测平均准确率为95.4%,花生苗株距检测平均误差为5.35 mm。李朋飞等[19]利用线阵CCD 相机扫描播种时的种子图像,并提出了一种基于半软阈值的图像降噪方法。
1.1.2 高速摄像机
高速摄像机与普通相机的主要区别在于其采集帧率高,能够捕捉清晰的高速运动的种子图像,进而实现对种子破损、种子姿态等特征的检测。然而,高帧率会导致图片数量增多,对数据传输和处理提出了更高的要求,在实验室环境中应用较多。如陈进等[20]提出了一种使用高速摄像机采集排种器中高速运动的种子图像的方法,并通过对比图像像素点的面积与设定的单粒种子面积范围来判断种子破碎和重播情况,试验结果表明,相较于人工检测,高速摄像检测的排种合格指数相对误差<1%,变异系数相对误差<3%。LI 等[21]利用高速摄像机拍摄落到传送带上的种子,通过图像处理方法计算排种器的合格率、重播率以及漏播率。韩国鑫等[22]设计了一种水稻精量穴直播机播种作业监测系统,通过无线通信网络将CCD 高速摄像头采集的种穴图像传输到上位机进行图像处理,判断播种数量,检测排种精度和种子破损率,试验结果表明:播量检测最小相对误差为0.3%,最大误差为3%。廖庆喜等[23]针对光电传感器无法判断种子破碎等问题,为提高精密排种器的性能检测的真实性和可信性,将高速摄像机与光电传感器相结合进行排种器性能检测。利用高速摄像机可以更准确地检测种子重播率和破碎率,但使用环境较严格,使高速摄像机难以应用到实际的播种作业过程中。
1.1.3 无人机
相较于高速摄像机和普通相机,无人机在种子发芽后的幼苗检测方面具有独特优势。郝嘉永[24]和刘志等[25]使用无人机采集了玉米苗期不同生长阶段的RGB图像,并通过图像处理技术实现了玉米苗的计数。戴建国等[26]利用无人机遥感平台采集3~4 叶期棉花的高分辨率影像,结合图像处理和机器学习技术识别分割棉花目标,构建棉株计数模型,可以监测棉花出苗率、冠层覆盖度以及长势均匀性等苗情信息,试验结果表明:与真实出苗率相比,检测误差仅为0.89%。
朱松松等[27]利用无人机获取棉花出苗期图像,并使用图像处理技术对棉花出苗期图像进行分割与分析,提取棉田苗行、棉花播种数和实际出苗数。陈雯[28]利用无人机获取不同密度和不同播种方式处理的小麦田间苗期图像,通过计算盖度和角点数量,建立了苗数估算模型。赵戈秋[29]利用无人机采集VC 期至V2 期的大豆苗情图像,结合深度学习技术,对田间作物及作物行分布信息进行检测,实现了田间大豆苗情及杂草分布信息的获取。
张新龙[30]基于无人机搭载可见光成像设备获取玉米苗期影像数据,构建快速、准确的玉米幼苗数量监测算法,提出基于图像监测的玉米出苗质量评价方式,为苗后田间管理与田间决策提供数据参考。LIN 等[31]使用无人机采集花生幼苗的视频数据,并提出了一种高效快速的实时花生视频计数模型,准确区分花生幼苗和杂草,并根据视频对花生幼苗进行计数。不同相机的使用场景和优缺点对比如表1 所示。

表1 不同相机的使用场景和优缺点对比Table 1 Comparison of the use scenarios and advantages and disadvantages of different cameras
1.2 检测算法
计算机视觉技术的检测算法从用于检测和识别物体的简单图像处理算法,到用于模式识别、光学字符识别等领域的特征提取、分类器设计、形状分析等算法,再到用于更高级的图像分析和理解的支持向量机、决策树等机器学习和深度学习算法等。精密播种作为计算机视觉技术应用的一类典型的农业场景,其检测算法的发展也经历了上述的过程。
1.2.1 简单的图像处理
郝嘉永[24]基于无人机采集的不同生长时期的玉米植株图像,通过二值化、膨胀、包围轮廓等方式在农田背景中提取玉米苗信息并进行计数,试验结果表明,按区域计数,该方法准确率可达90%以上,而按垄计数,该方法准确率为80%左右。刘志[32]基于玉米苗期高清图像,通过二值化、腐蚀膨胀等深度优化处理技术得出玉米苗期图像轮廓,计算玉米出苗数量。韩国鑫等[22]利用图像的灰度化处理、中值滤波、膨胀与腐蚀运算和图像二值化提取种子有效点数,试验结果表明,该方法播种量监测的相对误差<3.0%。侯加林等[33-34]开展图像处理技术在大蒜的应用研究,通过图像处理的方法识别蒜种鳞芽方向,具体步骤为:(1)将图像转化为灰度图,并计算蒜种头尾图像的能量、熵、惯性矩等统计特征值;(2)比较蒜种头尾图像的能量、熵、惯性矩和纹理特征,并进行二值化;(3)比较同一阈值下二值图像的黑色区域面积(黑色像素点数目)来识别蒜种鳞芽方向。陈雯[28]通过无人机采集小麦田间苗期图像,利用超绿值分割提取图像中的大部分麦苗,利用形态学腐蚀和膨胀消除图像中的杂质,预测小麦出苗均匀度,试验结果表明,该方法测得均匀度平均误差<10%。张新龙[30]基于无人机采集的玉米苗期影像数据,通过超绿指数提取玉米植株,结合图像对比度增强技术、形态学运算、轮廓检测识别,快速、准确获取玉米出苗数量。
当前关于应用计算机视觉技术进行播种检测的研究主要通过分析种子的大小、形状、颜色等特征,采用灰度化处理、二值化、膨胀、腐蚀等技术,以及形态学运算、轮廓检测等图像处理方法,以实现种子和幼苗的检测和计数。这些算法虽然已经可以实现基本的种子识别功能,但仍存在一些缺点,例如:(1)这些方法需要人工调整参数、阈值等,对于不同的作物种子、幼苗和环境场景需要不同的参数设置;(2)处理结果受到图像质量和采集方式等因素的影响,因此需要对图像质量有高要求;(3)对于复杂场景和不规则形状的农作物,处理难度较大;(4)对于不同类型的农作物和阶段,需要重新设计和调整算法等。
1.2.2 机器学习
薛金利[35]基于无人机遥感平台采集的3~4 叶期棉花高分辨率影像,选取GBDI、ExG、NGRDI、NGBDI等8 种颜色指标对影像进行颜色特征分析,并结合Otsu 自适应阈值法实现棉花目标的提取;结合SVM(support vector machine)构建棉株计数模型,实现了棉花出苗苗情的检测,棉株计数模型分类精度达到97.17%;通过尺度扩展、目标框维度聚类、多尺度训练等方法对YOLOv3 网络模型进行了优化,实现了苗期影像杂草识别。杨洋等[18]针对花生出苗图像,采用K均值聚类方法和花生苗—土壤自适应分类算法,从背景中提取花生苗图像,试验结果表明:花生苗数量的检测平均准确率为95.4%,花生苗株距计算平均误差为5.35 mm。朱松松等[27]通过K 均值聚类算法分割图像中的地膜,通过超绿灰度化和手动阈值分割算法分割图像中的棉苗,并应用最小二乘法进行苗行检测,试验结果表明:出苗行数检测误差为0,棉花出苗率检测准确率最高为90.45%,棉花播种数误差仅为5%。赵戈秋[29]基于大豆苗情图像,通过简化YOLOv5s 模型,并在此基础上减去了20×20 尺度的相关特征层以提升模型性能,实现了大豆叶片识别,优化后的YOLOv5s模型检测精度达91.8%。LIN 等[31]基于无人机采集花生幼苗的视频数据,通过将视觉transformer 与CSNet相结合,以取代原来的CSNet 主干网,优化YOLOV5s网络模型,准确区分花生幼苗和杂草,实现对花生幼苗进行计数,试验结果表明:模型检测准确率为98.08%。高振等[36]利用在播种作业过程中采集种床图像,并利用深度学习目标检测网络YOLOX 对种床图像中种子进行检测。
相较于灰度化处理、二值化、膨胀、腐蚀等图像处理方法,机器学习方法可以自适应地学习不同类型的农作物和农作物不同阶段的特征,具有更强的智能化和自适应性;可以识别更复杂的特征,自动调整模型以适应新的种子品种。机器学习算法还可以提高检测算法的准确性和效率,进一步提高精密播种技术水平。机器学习方法在使用前需要大量的标注数据和长时间的训练,对计算机性能要求较高,在精密播种领域的应用还较少。不同检测算法的优缺点对比如表2 所示。

表2 不同检测算法的优缺点对比Table 2 Comparison of the advantages and disadvantages of different detection algorithms
1.3 计算机视觉技术在种子粒距检测领域的应用
根据种子在播种机中的流动过程,以及排种器性能检测、种子运动状态研究和播种机播种质量检测的要求,目前计算机视觉技术在种子粒距检测领域的主要应用方向包括:(1)室内排种器性能检测:将排种器安装在试验台架上,通过电机驱动排种器转动,通过图像处理技术获取不同位置的种子运动状态信息,检测静态状态下的排种器作业性能。(2)大田播种作业检测:综合考虑地表起伏、环境等引起的机械振动条件下,利用图像处理技术检测播种机播种质量。
2 室内排种器性能检测
2.1 种子在排种器内运动的性能检测
为提高排种器工作性能,利用计算机视觉技术对排种盘上的种子进行检测,量化排种器性能,并进行目标性优化。NAVID 等[37]利用高速摄像技术用来评估室内排种试验台的种子间距(图2)。MANGUS 等[38]使用基于LabVIEW 的高速成像系统,结合播种机状态、导种管传感器数据和基于视觉的种子测量,以300 帧/s 的速度实时记录排种器作业过程,以量化其工作性能。模拟高速播种试验表明,突然加速或减速会导致排种误差增大,速度快速变化会导致排种误差增加一倍。针对排种器的排种过程,在种子离开排种器后,利用计算机视觉技术采集种子图像,可以检测种子运动情况和种子位置,实现重播、漏播和播种粒距检测,如图3 所示。
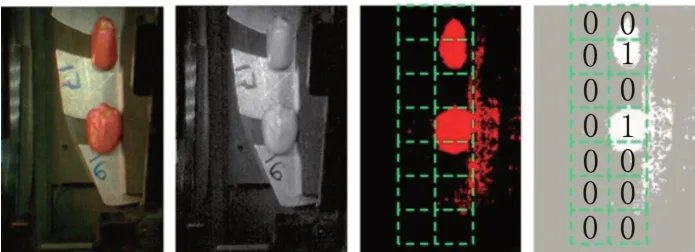
图2 计算机视觉技术在取种过程中的应用Figure 2 Application of computer vision technology in the process of seed collection
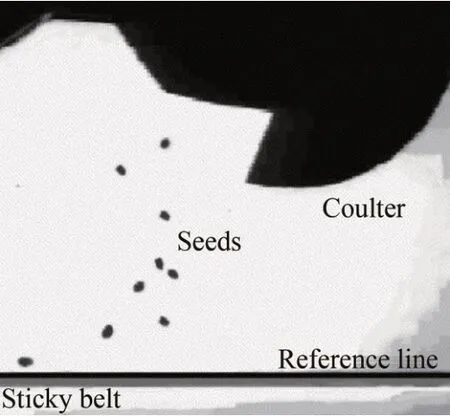
图3 计算机视觉技术在排种过程中的应用Figure 3 Application of computer vision technology in the seeding process
KARAYEL 等[39]在实验室中使用高速摄像机记录种子从导种管经过到落入种床前的过程,采集种子图像,评估种子间距均匀性和下落速度,并与粘性油带试验台检测结果进行对比。结果表明,高速摄像系统在种子间距均匀性和下落速度检测方面的性能更优。安爱琴等[40]在种子从排种器排出后,使用CCD 摄像机采集包含原始图像的种子流视频信号,获取帧种子图像,并基于MATLAB 的bwlabeln(x)命令识别帧种子数,利用帧种子数和型孔数的关系推导排种质量模型,进而完成对排种器排种质量的检测。王玉顺等[41]针对条播排种器的性能检测问题,提出一种基于计算机视觉的自动化检测方法,使用CCD 相机拍摄种子从排种器排出的图像,对图像进行二值化、降噪滤波和模式识别等处理,通过排种量的分布评估排种性能,试验结果表明,当样本容量达到1 100~2 005 时,检测误差仅为3.32%。
2.2 涂油皮带排种器试验台性能检测
针对涂油皮带试验台,对落在涂油皮带上的种子进行检测,利用计算机视觉技术获取落在涂油皮带表面的种子图像,计算种子位置和播种粒距,避免人工测量产生的误差,并降低了劳动力需求。种子经过排种器后落在涂油皮带上,以涂油皮带的运动代替实际的田间播种运动。蔡晓华等[42]针对涂油皮带试验台人工测量粒距劳动量大,准确率低等问题,提出了基于计算机视觉原理的排种粒距检测方法,使用镜头朝向涂油皮带的相机获取皮带上的种子图像,采用灰度阈值分割方法提取背景中的种子图像,使用边缘检测法识别种子并测量粒距,以取代传统的人工测量方法,试验结果表明,该方法的测量误差<±1 mm。
马焕菲[43]为实现穴播播种机种子流的视觉检测,基于BST-6 型播种机试验台以机器视觉的方式采集序列图像样本,经过图像处理消除背景检测种子算法得到最佳效果的种子像素图像,获得种子数时序样本,由校正过的种子数时序样本统计出种子数频率分布,并由该分布计算漏播率、重播率和粒距合格指数。李润涛[44]通过高速摄像机拍摄落在传送带上的小麦种子,通过图像处理方法得到排种器的合格率、重播率以及漏播率,试验结果表明,粒距测量误差<±1 mm。刘立晶等[45]设计了计算机视觉系统对涂油皮带上的种子进行拍摄,并实时检测出播种粒距,试验结果表明,该方法粒距检测的最大偏差为0.78 mm,粒距的最大相对误差为0.7%。不同检测方法的优缺点对比如表3 所示。

表3 不同检测方法的优缺点对比Table 3 Comparison of the advantages and disadvantages of different testing methods
3 大田播种作业检测
在实际播种过程中根据相机安装位置不同,计算机视觉技术主要分应用在排种器或导种管检测和播种末端检测中。
3.1 排种器和导种管中的应用
排种器或导种管检测的主要目的是保证种子流能在排种器或导种管中均匀流动以及预测种子粒距[46]。王平岗等[47]在气吸滚筒式排种器中安装了图像传感器,用于检测排种器的重播、漏播情况,这种检测方法可以较早地发现缺种情况,以便于补种装置及时补种。
赵静等[48]公开一种发明专利,在正对输种机构正上方中心位置安装CCD 相机采集输种盒中的种子图像,利用机器学习算法进行漏播检测并控制补种装置进行漏播补偿。由于排种器内空间有限,在排种器中安装传感器可能会影响其排种性能。
DEVIN 等[49]利用高速摄像技术研究了不同播种量、不同作业速度变化条件下导种管内玉米排种准确性,从而获得电动排种器排种均匀性信息。还可以在导种管中安装相机,如图4 所示。

图4 计算机视觉技术在导种管中的应用Figure 4 Application of computer vision technology in seed guide tube
该技术可以适用于不同形状的种子,如玉米、向日葵和油菜籽等。还可以识别重叠的种子,区分导种管内灰尘、秸秆碎屑和种子,具有光电式传感器所不具备的优越性。
3.2 在播种末端应用
现有研究普遍将两粒种子通过传感器的时间间隔与播种机的作业速度的乘积默认为播种粒距[13]。由于种子通过传感器后,与导种管和土壤发生弹跳碰撞,检测到的粒距与种子在土壤中的实际粒距存在差异,属于间接预测性检测方法。
为此,研究人员尝试在播种末端应用计算机视觉技术进行播种粒距检测。如BADUA 等[50]提出了一种基于种床图像的粒距检测方法,该方法利用高速摄像机采集种床中的种子图像,并采用基于特征提取方法的图像拼接算法对采集到的图像进行拼接,实现了种床中的种子粒距检测功能。然而,该研究仍处于概念验证阶段,功能的实现依赖特定的作业环境,如图5所示。
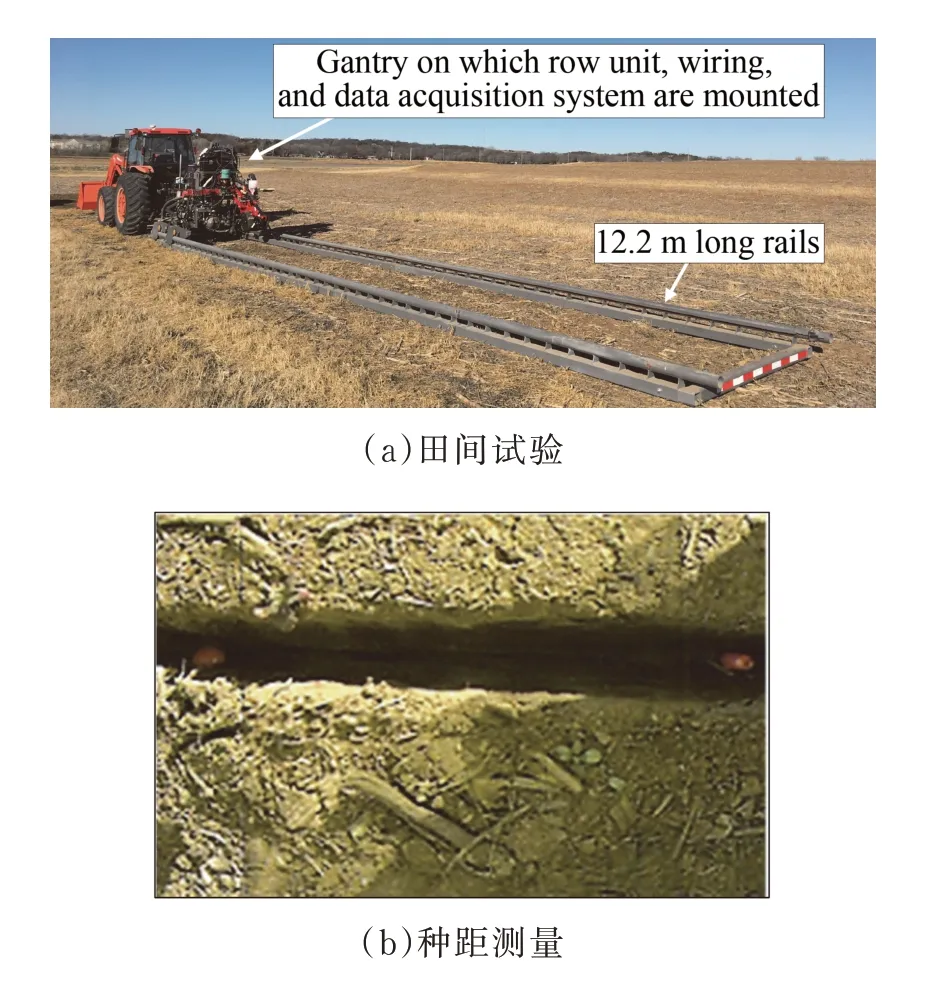
图5 计算机视觉技术在实际播种中应用的初步验证Figure 5 Preliminary validation of the application of computer vision technology in practical seeding
李润涛等[44]将光纤传感器和机器视觉相结合,光纤传感器检测排种器充种不佳所导致的漏播,与种床呈45°安装的相机检测落入种床中的种子数量,如图6所示。
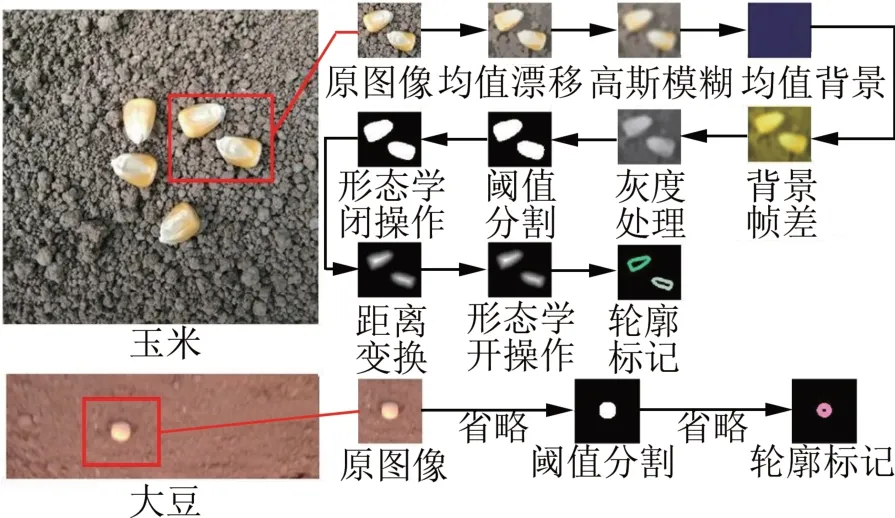
图6 计算机视觉技术在实际播种中的应用Figure 6 Application of computer vision technology in practical seeding
台架试验结果表明:当传送带速度达到0.2 m/s时,检测准确率高于93%。LIU 等[51]提出了一种基于图像识别技术的水稻播种成行性评价方法,在采集到种子分布图像后,采用基于均值滤波差分的动态阈值二值化方法(BD-MFD)对种子进行识别,然后获取每个种子中心的像素坐标,结合每个像素代表的实际长度标定结果,计算每粒种子的实际位置坐标,如图7所示。
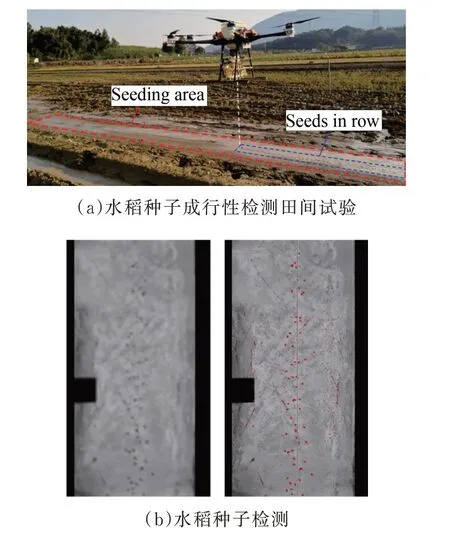
图7 计算机视觉技术在水稻成行性检测中的应用Figure 7 Application of computer vision technology in rice rowing performance detection
试验结果表明,种子坐标识别的平均相对误差为2.4%。在播种末端进行播种质量检测虽然可以规避种子与导种管和土壤的弹跳碰撞对检测结果的影响,但是,检测结束后种子立即被土壤覆盖,检测系统没有充足的时间将结果反馈到补种装置并控制补种装置进行漏播补偿。
卢彩云等[52]提出了一种基于图像处理的玉米播种质量检测方法,将工业相机与GPS 定位技术结合,工业相机检测到种床中的种子时,通过GPS 技术赋予种子位置信息,实现了种子在田间的位置检测。但是GPS 技术定位误差较大,即便是GPS-RTK 技术,也存在不可避免的2.5 cm 的误差,其检测精度有待提高。
4 存在问题
种子分布信息检测的准确性对于农业、生态学和环境保护等领域至关重要。然而,现有研究表明,在种子分布信息检测领域,计算机视觉技术仍然面临着准确性和稳定性方面的挑战。
1)种子形状和检测背景复杂。种子的形状、颜色和纹理等特征在图像中的表现可能存在一定的变化性,并且种子通常分布在复杂多变的环境背景中,增加了种子检测的复杂程度。这给计算机视觉技术的准确性带来了挑战。
同时,传统的基于特征提取和分类器的方法往往依赖于手工设计的特征,对于不同形状和颜色的种子的识别效果可能不尽如人意。而传统的背景建模和分割算法往往难以有效地区分种子和背景之间的差异,导致错误的检测结果。深度学习方法通过端到端的学习从原始图像数据中自动学习特征表示和分类器,可以更好地捕捉图像中的复杂特征,并在一定程度上提高识别的准确性。
2)实时性和数据处理要求高。种子分布信息检测需要具备实时性和大规模数据处理能力,从而应对农田或实验室环境中大量的种子数据。传统的硬件设备在处理大规模数据时往往会面临内存限制和计算资源瓶颈,无法提供及时有效的数据处理能力。可通过使用高性能计算平台(如GPU、FPGA 等)来加速数据处理和算法计算,以及通过优化算法和数据结构,减少计算和内存需求,可以提高实时性和大规模数据处理的能力。
3)多传感器数据融合困难。为了准确解释种子分布信息,需要综合利用多种传感器数据,如图像、红外、激光雷达等,以获取更全面和准确的结果。然而,不同传感器数据的异构性和不完整性使得数据融合和分析变得复杂而困难。当前的数据融合算法和技术需要进一步发展,以解决数据对齐、特征融合、误差传播等问题,提高种子分布信息的解释能力和准确度。
综上所述,种子分布信息检测领域在计算机视觉技术方面仍然面临着准确性和稳定性的挑战。为了克服这些挑战,需要进一步研究和发展新的计算机视觉算法和技术,以提高种子检测和识别的准确性,并解决实时性和大规模数据处理的需求。此外,数据融合和分析的能力也需要不断改进,以实现更全面和准确的种子分布信息解释。这将有助于推动农业、生态学和环境保护等领域的科学研究和实践,为农作物种植和生态系统管理提供更有效的支持。
5 总结与展望
在精密播种领域,计算机视觉技术发挥着至关重要的作用,旨在提高作物播种的效率和准确性。然而,尽管计算机视觉技术的发展日新月异,当前在精密播种领域的应用仍存在一些局限性。
为提升精密播种的准确性和效率,未来研究亟需关注深度学习和机器学习算法在该领域的广泛应用,以实现更高水平的种植智能化。未来计算机视觉技术在精密播种领域的展望如下:
1)深度学习算法的广泛应用:未来的研究将更加关注深度学习和机器学习算法在精密播种领域的应用,以实现更高水平的智能化播种。这些先进的算法将有助于提高图像识别和分类的准确性,从而改善播种效果。
2)鲁棒性和适应性的提升:随着技术的不断发展,计算机视觉技术将更好地应对环境变化,如光线和振动等因素。通过改进算法和设备,将提高视觉检测系统在各种环境条件下的鲁棒性和适应性。
3)设备成本降低和普及应用:随着技术进步和设备成本的降低,计算机视觉技术将逐渐从实验室走向实际生产应用,为更多农场提供高效、智能的播种解决方案。
4)多传感器数据融合:未来计算机视觉技术将与其他传感器技术相结合,实现多源数据的融合分析,有助于提供更全面、准确的农业信息,进一步优化播种策略和提高农业生产效率。
5)云计算和大数据支持:随着云计算和大数据技术的发展,计算机视觉技术将能够实时处理大量农业图像数据,有助于及时发现和处理农业问题,为决策者提供有力支持。
猜你喜欢
新疆农机化(2022年1期)2022-03-02 09:44:18
小学科学(学生版)(2021年7期)2021-07-28 06:44:42
科技传播(2019年22期)2020-01-14 03:06:34
儿童时代·幸福宝宝(2019年9期)2019-10-28 18:04:52
时代农机(2019年5期)2019-02-11 10:52:34
农业工程学报(2018年24期)2019-01-14 10:42:32
幼儿园(2018年15期)2018-10-15 19:40:36
消费导刊(2017年20期)2018-01-03 06:26:40
莫愁·家教与成才(2017年7期)2017-07-11 21:31:47
衡阳师范学院学报(2015年3期)2015-02-10 06:02:23