Development status and trends of intelligent control technology in unmanned farms
2023-09-10 07:12:34QIANZhenjieJINChengqianLIUZhengYANGTengxiang
智能化农业装备学报(中英文) 2023年3期
QIAN Zhenjie,JIN Chengqian,LIU Zheng,YANG Tengxiang
(Nanjing Institute of Agricultural Mechanisation, Ministry of Agriculture and Rural Affairs,Nanjing 210014, China)
Abstract: With China’s urbanization, land circulation has emerged as an avenue for efficient and intensive land use. Embracing technology as a primary driver, the unmanned farm technology model represents a bold attempt at sustainable agriculture development. This review focuses on the frontier and development trajectory of key core technologies, and addresses the significant industrial challenges of insufficient accumulation of data on unmanned farms, unknown interaction mechanisms among the environment, plants, and equipment, and lack of multi-parameter integration and regulation strategies for intelligent equipment. Technologies such as autonomous positioning and navigation, online professional sensor, work obstacle information perception, path planning, decision-making, multi-machine collaboration, autonomous operation, and variable operation technology have been implemented in this study. The research shows that, in future, realizing unmanned farms requires special sensors for agricultural intelligent equipment, precise operational decision control systems, and practically intelligent equipment.At meanwhile, addressing such challenges necessitates a focus on core technologies such as insufficient basic big data accumulation of unmanned farms, modeling of environment-plant-equipment interaction mechanism, and intelligent decision control algorithm. This comprehensive improvement in automation, intelligence, and environmental sustainability of agricultural production marks the future development trajectory of unmanned farms.
Keywords: unmanned farm; intelligent control technology; agriculture perception sensors; intelligent task automation
0 Introduction
Sustaining the global population requires long-term planning integrated into future agricultural policies. The agriculture industry confronts challenges such as food self-sufficiency and rural-urban migration. Societal aging, urbanization, and agricultural labor force shortage compound these challenges. The number of agricultural harvestable farms worldwide is limited, and the conversion of forests to farmlands will have irreversible consequences on the ecosystem, air pollution levels, and oxygen production. Automation and intelligence have emerged as solutions for addressing this complicated situation.
Over the past decade, China’s mechanization rate for crop cultivation and harvest has increased from 57%in 2012 to 72% in 2021, projected to reach 75% by 2025. It is imperative to robustly develop intelligent agricultural machinery and upgrade the industry. The United States, Germany, China, and Japan have implemented their smart agriculture development strategies[1]. The global agricultural machinery and smart equipment market are projected to reach 258.43 billion US dollars in 2027 and 135.4 billion US dollars in 2026, respectively. Intelligent agricultural equipment integrates advanced machinery, perception, decision,control, big data, cloud platform, and the Internet of Things (IoT) , facilitating agricultural tasks’autonomy, efficiency, safety, and reliability[2-3].
This study explores the technological frontier and development trend of unmanned farm systems. Section 1 introduces these systems. Section 2 describes the autonomous positioning and navigation technology.Section 3 examines the information sensing technology in unmanned farms, including online sensors for combine harvesters and common parameters. Section 4 discusses the intelligent control technology in unmanned farms, encompassing information perception technology of working obstacles, path planning decisions technology, multiple machines cooperative technology,assisted driving, driverless systems, and unmanned farm intelligent management. Section 5 discusses the future trend of unmanned farms. Finally, Section 6 concludes with the findings of this paper and the future development of unmanned farms.
1 Unmanned farm systems
Figure 1 illustrates an unmanned farm system.Unmanned farm refers to an innovative agricultural production model that integrates machinery, agronomy,and information through technical means such as the IoT[4], big data, artificial intelligence[5], and unmanned agricultural machinery. This approach realizes autonomous decision-making, “unmanned” production,and operation management with data drive without human presence within the farming area.

Figure 1 Schematic of unmanned farm systems
Integrating unmanned technology with intelligent machine technology of agricultural equipment allows for intelligent unmanned operation of agricultural equipment. Agricultural equipment operates within an unstructured environment that is characterized by diverse and complex interference factors for control systems. Achieving unmanned operation necessitates the tractor host to achieve unmanned driving and demands the study of intelligent decision control technologies for various machines[6-7].
The integrated solution for unmanned farms,which shows in Figure 2, encompasses an unmanned farm control platform comprising meteorological monitoring, soil assessment, disease, pest and weed tracking, and seedling growth monitoring. This platform interfaces with various unmanned agricultural machinery, including tillage, transplanting, crop protection, harvesting, and irrigation.

Figure 2 Integrated solutions for unmanned farms
In the complex working environment of farmland,there are common problems such as large labor amount,low efficiency, difficulty in monitoring operation parameters, and inability of adaptive adjustment in operation process. This unmanned farm includes intelligent and unmanned key technology research and development and system integration,and realized the efficient unmanned walking and intelligent autonomous operation of the whole process of machinery from hangar to field.
Specific technologies include: (1) Online monitoring technology of agricultural machinery operation parameters in the whole process of tillage,planting, pipe and harvest, including tillage depth,sowing amount, fertilizer application amount, drug application amount, grain loss rate, grain crushing rate,grain impurity rate, yield, etc. (2) Electromechanical hydraulic integrated adjustable operating parts and adaptive intelligent control technology, including suspension self-balancing intelligent control system,variable sowing and fertilization intelligent control system, variable application intelligent control system,chassis all-direction leveling intelligent control system,cutting table copying intelligent control system,adaptive threshing and cleaning intelligent control system; (3) Unmanned autonomous operation control technology, including navigation automatic driving technology, agricultural machinery highly adaptive integration technology, unmanned walking and autonomous operation collaborative control technology.
2 Autonomous positioning and navigation technology
Autonomous positioning and navigation primarily encompass global navigation satellite system (GNSS)and visual positioning technologies. The real-time kinematic (RTK) is a carrier phase difference technology with precision ≤ 2.5 cm. RTK-global positioning system (RTK-GPS) and RTK-BeiDou navigation satellite system (RTK-BDS) are widely applied in precision agriculture, promoting the development of automatic navigation technology for agricultural equipment. Based on foreign inertial measurement unit (IMU) 3D attitude measurement and compensation technology, the positioning accuracy of high-precision positioning technology can reach 1 cm when the slope is 15°. China’s IMU 3D technology achieves a positioning accuracy of 1 cm at a 10° slope.This technology is foundational for the automated driving of agricultural machinery; therefore, this study focuses on location positioning and line detection.
The current agricultural machinery satellite navigation and positioning technology is relatively mature and standard in high-end agricultural machinery.Vision and laser-based line detection, particularly the environmental robustness of visual line detection,affects its practical application. In the future, the combination of satellite positioning and visual navigation will meet the needs of more operation scenarios.KAIZU et al.[8]used augmented reality (AR)technology to construct 3D images of the environment to determine the position of tractors. HU et al.[9]proposed a cascaded navigation control method for straight path tracking. MALAVAZI et al.[10]used lidar to extract lines from 2D point clouds using the PEARL algorithm. CHOI et al.[11]developed a visual line detection method based on morphological features,including leaf and stem orientations and crop density.ZHANG et al.[12]proposed the concept of a visionbased navigation system for the agricultural IoT and a binocular vision navigation algorithm for smart agricultural robots, which can fuse the edge contour and the height information of rows of crop in images to extract the navigation parameters. High-precision path tracking control technology in US and China shows the linear tracking control accuracy to be 2.5-3.0 cm at the operating speeds of 25 km/h and 12 km/h,respectively. Advancements in the vehicle kinematics model and speed compensation algorithm are needed. In US multi-sensor fusion navigation technology uses satellite and machine vision fusion positioning technologies to achieve high-precision and full-width harvest under independent operating conditions. In contrast, in China the crop boundary identification technology uses satellite positioning and machine vision information fusion technology, which needs further advancement.
3 Information sensing technology in unmanned farms
3.1 Online professional sensors of combine harvesters
China’ s intelligent technology for combine harvesters faces challenges in operation parameter monitoring, automatic control, navigation, and auxiliary driving.
Although exploratory research exists on online operation parameter detection, mature industrial products are lacking due to underdeveloped, timeintensive, and costly technologies, such as fast and accurate segmentation and recognition of feature information, universal estimation model, reconstruction of yield map, and error analysis. China still employs manual mechanical control of driving speed, sorting and cutting, and other operating parameters, lacking a comprehensive terminal for data collection and display of operating conditions and engine and machine operating status.
Research on intelligent technology based on closedloop control of job information is still in the initial stage in China. In addition, navigation and automatic driving technology based on the harvest operation environment remains challenging. The online professional sensors of combine harvesters, such as loss rate sensor, impurity content sensor, and yield diagram are shown in Figure 3.
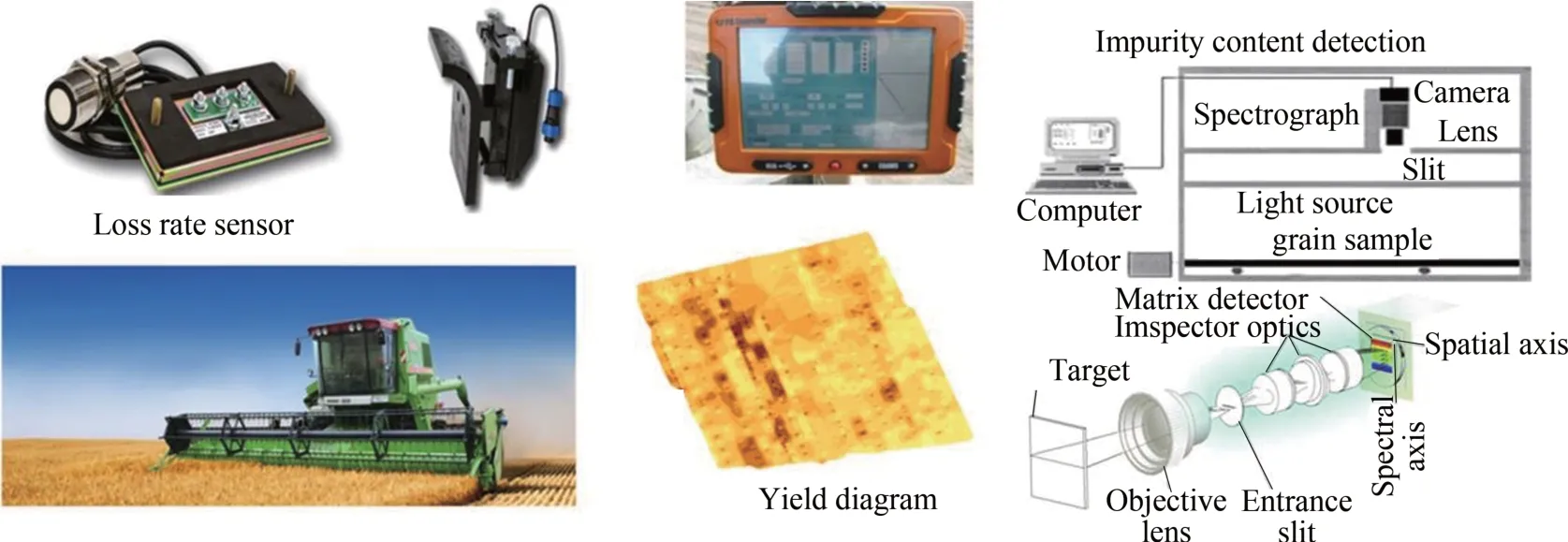
Figure 3 Loss rate sensor, impurity content sensor, and yield diagram
Online grain crushing rate monitoring: image processing technology is mainstream in US and Germany, with ongoing promotion and application. In contrast, domestically, research is in the prospective stage, with no mature technology, image online rapid recognition algorithm, or crop model. JIN et al.[13]employed an enhanced U-net network for online soybean grain crushing rate and impurity rate detection during mechanical harvesting. Online grain loss rate monitoring: Foreign use of piezoelectric impact effect principle is mature in harvester products, focusing on qualitative analysis, domestic theory, and model research stage.
Domestically, there is no mature technology, and research on sensor superposition signal processing and loss rate distribution model is insufficient.HIREGOUDAR et al.[14]employed an artificial neural network to assess grain harvest losses under field conditions. ZHANG et al.[15]improved Deeplabv3+by constructing MobileNetv2 in coding layer and adding ECA (efficient channel attention) to Encoder and Decoder to improve extraction accuracy of highdimensional features in images with a large number of objects with random state,which shows in Figure 4.
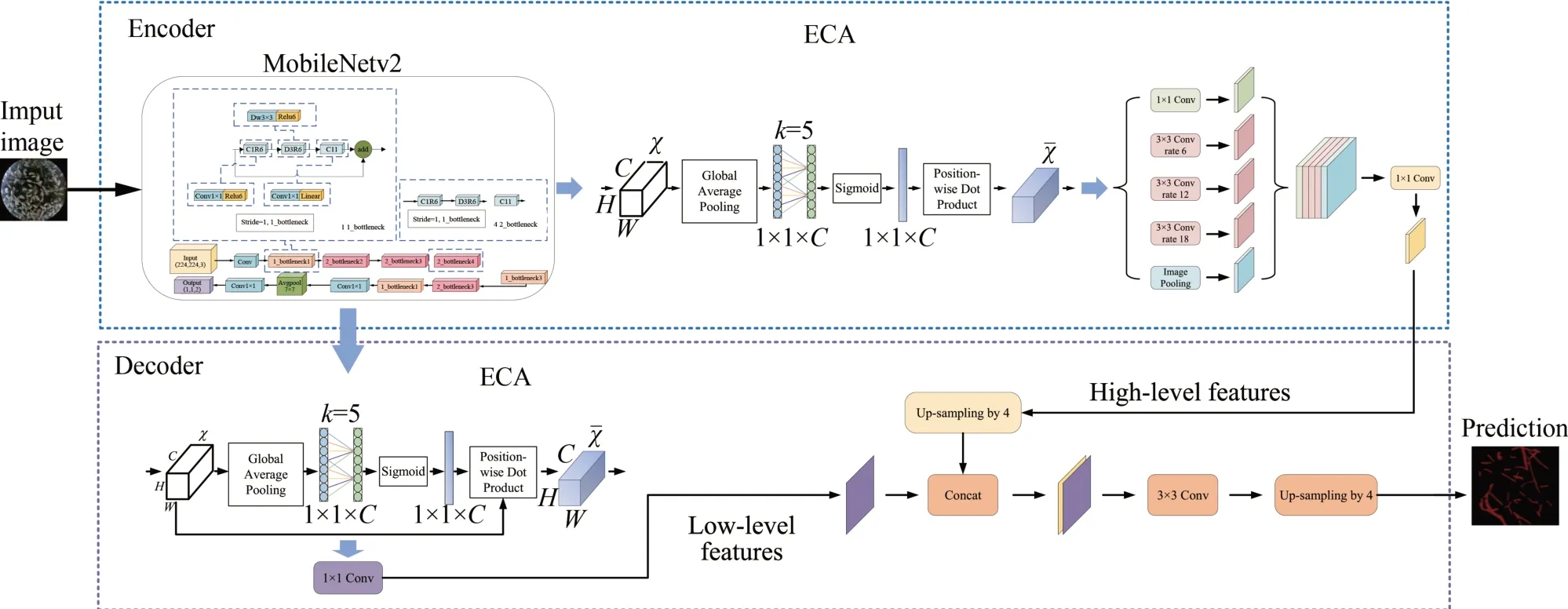
Figure 4 Improved Deeplabv3+ with coding layer and attention mechanism optimization
Online grain moisture content monitoring: Foreign systems are mature and commercialized, with 95%measurement accuracy. In contrast, the domestic online detection equipment for combine harvesters is underdeveloped. Moisture content models based on environmental factors and mechanical vibration require refinement.
Online grain yield monitoring: Foreign systems are established and commercialized, with a measurement error of ±5%. In contrast, domestic research is in the initial stage, with large impulse model deviation and low sensor response[16]. DA et al.[17]used six dual-plate differential impact sensors to determine grain yield,significantly reducing noise interference caused by vibration.
HU et al.[18]developed a two-plate impulse grain flow sensor and its differential vibration suppression circuit to mitigated the body vibration influence on measurement accuracy. YANG et al.[19]designed an impulse grain combined harvest intelligent yield measurement system and a grain yield measurement system based on computer vision. JIN et al.[20]employed a grain harvester yield monitoring system based on duty cycle measurement, which comprised a photoelectric sensor, GPS module, data processing unit, data storage unit, and visualization unit. The intelligent soybean combine sensors and system made by the Nanjing Institute of Agricultural Mechanisation,Ministry of Agriculture and Rural Affairs, which shows in Figure 5.

Figure 5 Intelligent soybean sensors and system for combine harvesters
Automatic control technology of grain combine operation: Foreign advancements enable online detection of industrial control operation parameters and multi-parameter independent regulation.
However, China primarily focuses on speed monitoring of working devices. Adaptive regulation of working performance remains in the preliminary research stage, and the online detection of working condition parameters is underdeveloped. In addition,the multi-parameter fusion regulation model is inadequate, and research on the regulation law of multicrop parameters needs further exploration.
3.2 Online sensors of common parameters
Common intelligent sensors of agriculture equipment encompass environmental perceptions,object information parameters of agricultural machinery,crop health perceptions (growth, disease, insect damage) , working environment, and obstacle information. The sensors also consider the perception of the working parameters and operating state parameters of agricultural equipment, such as tillage, fertilization,seeding, plant protection, harvesting machinery,engine information, power output, torque, slip rate,attitude, and safety risk. Engine and power output data can be accessed via ISO 11783 protocol through the CAN bus. Attitude information can be obtained through the Beidou module and gyroscope. However, detecting torque and slip rates remains challenging.
RAJABI-VANDECHALI et al.[21]employed the radial basis function (RBF) neural network and adaptive network-based fuzzy inference system(ANFIS) to estimate tractor engine torque using lowcost sensors. SUN et al.[22]presented deep learning’s application in various agricultural information detection aspects, such as plant identification, disease and pest diagnosis and identification, and remote sensing region classification and monitoring.
Tillage machinery parameters include attitude,pressure, position, and depth. Accurate tillage depth detection is pivotal for sub-soiling operations. Future tillage mechanical operation parameter sensing can be integrated with soil information sensing technology for comprehensive and multi-parameter soil perception in the tillage stage. Fertilizer and seeding machinery operation parameters include velocity, fertilizer discharge, and sowing depth. Accurate perception of these parameters is crucial for the accurate and autonomous operation of such machinery. While precision control technology of fertilization and sowing is relatively mature, fertilizer flow detection, such as photoelectric and capacitor, lacks accuracy and reliability. Future research should focus on intelligent processing methods of detection data and innovative sensors.
The operation parameters of plant protection machinery encompass spray pressure, flow, and rod attitude. Research on operation parameter sensing of plant protection machinery is currently limited. In the future, the sensing mechanism of liquid fertilizers and pesticides should be studied to address sensors’corrosion resistance and accuracy retention issues.
4 Intelligent control technology in unmanned farms
4.1 Information perception technology of working obstacles
Obstacle information perception guarantees the safe and reliable operation of intelligent agricultural equipment in complex unstructured farmland environments. Obstacles in the operating environment of agricultural equipment are complex and changeable,such as static trees, poles, walls, and houses and dynamic people, animals, and operating agricultural machinery.
The primary obstacle detection approaches encompass ultrasonic radar, laser radar, infrared sensor, vision sensor, and multi-sensor fusion. In obstacle perception technology in agricultural equipment environments, infrared technology effectively detects humans and animals, while ultrasonic and lidar systems offer extensive measurement ranges and high detection accuracy in distance and speed. 3D radar has a high measurement accuracy but a high cost. Combining vision and 2D radar for obstacle detection presents an optimal solution, with multi-sensor fusion being a pivotal research focus for farmland obstacle perception.DVORAK et al.[23]utilized ultrasonic sensors to detect obstacles in agricultural environments. DIEGO et al.[24]employed an array of ultrasonic sensors to detect obstacles, enhancing stability. MAIER et al.[25]adopted monocular vision sensors coupled with reinforcement learning algorithms to detect obstacles and improve detection stability. DING[26]explored a multi-sensor fusion obstacle perception scheme integrating vision, lidar, infrared imaging, and ultrasound. XU et al.[27]based on a panoramic camera to rapidly detect the dynamic obstacles around the moving agricultural machinery, and used the Lucas-Kanade optical flow algorithm to detect the moving obstacles in a panoramic image.
4.2 Path planning decisions technology
Path planning, as shown in Figure 6, of agricultural equipment entails meeting the requirements of relevant agronomic norms while optimizing parameters such as operation distance, time, turn times, and energy consumption in the operation area adhering to weight and leakage constraints. It involves determining a logical walking route that ensures agricultural machinery’s unmanned and autonomous operation.

Figure 6 Path planning decisions technolog
The driving path of agricultural equipment in the field environment includes straight segment tracking of crop rows and curve segment connections. Straight-line segment routing relies on A-B line navigation technology. Comprehensive field coverage path planning considers turning and driving paths within the farmland area. There are four current planning scheme types: S-shape, mouth shape, back shape, and diagonal shape. Regional path planning focuses on turning paths, which include bow, semi-circle, pear,and fishtail shapes. KAREN[28]introduced a decision support system for tractor navigation, optimizing for time, fuel, and profitability of the driving path.HAMEED[29]proposed a multi-objective optimal coverage planning method based on cost minimization for path planning. JING et al.[30]presented an innovative method using an improved multiobjective algorithm to solve the path optimization problem for autonomous land levelling operations. MENG et al.[31]proposed a path optimization approach for whole-area coverage of plots for farmland working machinery,which divided field operations into various categories and chose path optimization objectives following the minimal turns, least job consumption, shortest total job path, or maximum effective job path ratio.
Regular block full-coverage path planning algorithms are relatively mature, with future research focusing on irregular blocks, multi-obstacles, multiconstraints, adaptive path planning algorithms for varying host and machine turning radii, and path planning algorithms to navigate around diverse obstacles.
4.3 Multiple machines cooperative technology
Modern agricultural machinery is developed to be large and complicated or has improved production efficiency through the cooperative operation of multiple small machines. Cooperative multi-machine operation significantly benefits time-sensitive tasks within operation windows.
Harvest master-slave collaborative work technology in US and Germany has already been applied. However, uniform distribution of grain unloading under domestic cooperative operation remains challenging, necessitating the research of the control technology under master-slave cooperative operation.The multi-machine cooperative control, which shows in Figure 7, of agricultural equipment can be categorized into master-slave cooperative and joint operation controls.

Figure 7 Multiple machines cooperative technology
ZHANG et al.[32]studied a leader-follower system in Japan, where a manually driven tractor follows an autonomous one, with multi-robot systems in rice,wheat, and soybean agriculture. This robotic agricultural system included a rice-growing robot, a seeding robot, a harvester, and various machines attached to the robotic tractor. CAO et al.[33]used the ant colony algorithm to plan multi-machine cooperative tasks, establishing a task assignment model. BAI et al.[34]proposed a collaborative navigation control method for harvesting machinery based on a pilot-following structure,combining feedback linearization and sliding mode control theories to design the asymptotically stable path tracking and formation-keeping control laws.
Multi-machine collaboration is an emerging technology in agricultural machinery intelligent control[35], focusing on pilot-following collaborative algorithms. Future practical collaborative technology should address the issue of single-machine anomaly diagnosis and formation recovery, cross-regional airground coordination, cloud-end cooperative scheduling,collaborative operation management, and control platform technology of agricultural equipment clusters.In addition, multi-agricultural equipment cluster cooperative cloud scheduling technology should focus on distributed multi-machine cooperative remote operation, maintenance technology, and man-machine concurrent control technology.
4.4 Assisted driving technology
Automatic driving technology for agricultural equipment is primarily in the assisted driving stage,serving as a transition between traditional and unmanned driving. Assisted driving is characterized by linear tracking and ground turning, while operators manually handle machine control. This approach enhances operator focus on agricultural machinery operations,elevating operational quality. Case’s AFS solutions include AFS AccuGuide and AccuTurn-assisted driving technology, which can be installed in conventional tractors. John Deere’s AutoTrac solution enables automatic turning with large radii, reducing the overlap of operating areas. CEMOS solutions from Kraut provide automatic line alignment and adaptive radius turning. The iMFARMING precision agriculture solution by Gran includes the IsoMatch autonomous driving system with an automatic steering function. The intelligent turning system SmartTurn, jointly developed by Holmer and Reichhardt, can realize the automatic beet excavator turning.
The automatic driving system of agricultural equipment in China, primarily achieves the tractor’s linear tracking through the Beidou satellite positioning and navigation system. Most agricultural equipmentassisted driving products are post-installation systems,which have increased the complexity of accurate tracking and operation control parameter adjustment and matching.
4.5 Driverless technology
Driverless driving represents the highest stage of autonomous driving development. However, the continuously variable speed and power shift of tractors is a challenge in its implementation. Some leading agricultural machinery companies, such as John Deere,AGCO, Case, and Deutz-Fahr, have introduced highpower tractors with continuously variable speeds, and China Yituo Group Co., Ltd. exhibited China’s first truly unmanned tractor ‘Super Tractor No. 1.’ Case’s unmanned concept tractor ‘Magnum’ (Figure 8) allows the operator to use a desktop computer, tablet computer, and other terminals to monitor the tractor’s operation.

Figure 8 Driverless technology
The onboard camera provides real-time visuals of the tractor’ s operating state and its working environment for reference. The safety of unmanned driving is ensured via the tractor’s radar, laser ranging sensor, camera, and other sensors for obstacle detection. The tractor employs real-time weather and big data for autonomous decisions. It halts operations during unfavorable weather conditions and resumes when conditions improve.
In the future, agricultural equipment equipped with auxiliary driving systems will continue to occupy a prominent position among farmers. As agricultural intelligence advances, more enterprises will introduce more mature, practical driverless unmanned tractor products with supporting accessories.
4.6 Intelligent task automation and variable operation decision technology
Intelligent task automation technology for grain achieves the online detection of industrial control operation parameters and multi-parameter independent regulation in US and Germany. In contrast, the focus in China remains on monitoring device speed.
However, adaptive performance regulation is still in the preliminary research stages, with the online detection of working condition parameters, the multiparameter fusion regulation model, and the regulation law of multi-crop parameters requiring further exploration.
Variable operation decision technology explores the correlation regulation law among crop attributes,operation parameters of machinery and tools, and operation quality. Future development will include advanced algorithm models, big data integration,artificial intelligence, and cloud computing in variable decision-making.
Agricultural machinery’ s variable operation decisions amalgamate expert experience, machinery dynamics models, and artificial intelligence. The agriculture machine with a variable operation decision system is shown in Figure 9.

Figure 9 Agriculture machine with variable operation decision system
KAIVOSOJA et al.[36]from Jyvaskyla University in Finland employed remote sensing data to estimate the soil’s nitrogen content, enabling precise variable fertilization. MENG et al.[37]developed variable job control and auxiliary navigation software based on prescription graphs. WEI et al.[38]designed a pulsewidth modulated intermittent spray variable spraying system, and YUAN et al.[39]developed a variable fertilizer applicator for wheat precision sowing and created a decision support system for nitrogen,phosphorus, and potassium matching fertilization based on job prescription diagrams.
4.7 Unmanned farm intelligent management
The intelligent agricultural machinery system is a cross-regional operation and control system integrating agricultural equipment, cloud intelligence, and a service platform. This platform incorporates intelligent on-site control, cloud decision-making, and mobile monitoring and scheduling.
Agricultural machinery’s operation information management platform,which shows in Figure 10, is based on cloud service design and development,integrating data transmission, network communication,model customization, visual supervision, history tracing, report export, and other functions. This intelligent management platform enables efficient visual implementation of farm plots and agricultural machinery maintenance, process monitoring, and quality analysis.Its application spans cooperatives, and family farms,and encompasses operations from tillage to planting,harvesting, plant protection, and drying of all agricultural equipment.

Figure 10 Unmanned farm intelligent management platform
Host companies such as John Deere, Case, Fente,CLAAS, and Gran have developed networked agricultural equipment management and control platforms. John Deell’s JDLink system offers equipment location viewing, fault information, fences and curfew setting, maintenance schedules and alerts, fault code diagnostics, map sharing, and report generation. Case’s AFS Connect system provides remote monitoring of the status and location of agricultural machinery, maintenance management, fault information sharing, alarm handling,and remote diagnosis and maintenance. FendtONE system from FendTONE allows remote viewing, analysis, and optimization of machines and fault codes. AGROCOM system of CLAAS exchanges data with telematics through CLAAS API, facilitating data management, remote monitoring, and data sharing across platforms.
5 Future trend in unmanned farms
China’s unmanned farm construction has been carried out for nearly 20 years, in recent years, China’s agricultural machinery enterprises have developed unmanned tractors, unmanned plant protection machines, unmanned harvest machines and unmanned grain trucks and many other unmanned agricultural machinery equipment, and in rice, wheat, corn,soybeans and other field production operations carried out a lot of application practice.
Firstly, the domestic production of special sensors for agricultural intelligent equipment is insufficient, and the reliability needs to be improved. Although the domestic market share of agricultural environmental information sensors and instruments in China exceeds that of imported products, there is a huge gap with foreign products in terms of accuracy, stability,reliability, etc., core sensing components mainly rely on imports, and high-end products almost all rely on imports.
In addition, the ecological diversity of agriculture is also diversified in technology and application mode, but for research and development subjects, after investing a lot of money in research and development, it can not be replicated and promoted on a large scale like industrial technology products, which is inefficient, leading to the reluctance and dare not invest in enterprise research and development subjects.
Secondly, the precision operation decision-making control system algorithm of intelligent equipment is not accurate enough, the environment-plant-equipment interaction mechanism is unclear, and the multiparameter integration regulation strategy of intelligent equipment is lacking. The relevant operational decision control system models are few, the algorithms are not accurate enough, and lack of universality. For example,precision seeding, fertilization control technology, loss rate detection, etc., are still in the research and development stage.
Thirdly, the market lacks the intelligent equipment products suitable for a variety of different working environments. China has a large territory and abundant resources, and the varieties of crops are diverse. There are great differences between the north and the south,and there are also great differences in the growing environment and production agronomy. At the same time, the scale of farmland in China is small, the cultivated land is fragmented, and the general intelligent equipment products are insufficient, which is difficult to meet the current demand.
Fourthly, the accumulation of basic data of unmanned farms is insufficient. Unmanned farms largely rely on information technology such as the network and Bluetooth to transmit the corresponding data, but there are now problems such as weak Internet of Things facilities and high communication costs. The accumulation of farmland quality, hydrology detection,meteorological detection, soil moisture and other data is insufficient, and the lack of professional agricultural information operation and maintenance personnel makes it difficult to accumulate basic data of unmanned farms for further optimization.
6 Conclusion
The 21stcentury has ushered rapid advancements in information technology. As the cornerstone of the national economy, traditional agricultural models are evolving to align with social development. Amidst China’s urbanization surge, land circulation presents an avenue for efficient and intensive land use. The future of agriculture lies in technology-first approaches, with the unmanned farm technology model representing a bold attempt toward sustainable development of agriculture. Autonomous positioning and navigation technology, online professional sensors, information perception technology of working obstacles, path planning decision technology, multi-machine cooperative technology, automatic operation, and variable operation decision technology have found practical applications. However, developing specialized sensors for agricultural intelligent equipment, precise operation decision control systems of intelligent equipment, and practical intelligent equipment remain pivotal for the realization of unmanned farms.
Addressing primary industrial challenges, such as insufficient basic data accumulation of unmanned farms,unclear environment-plant-equipment interaction mechanism, and lack of multi-parameter integration regulation strategy of intelligent equipment necessitates a focus on core technologies such as agricultural big data, intelligent decision-making systems, robot operation equipment, the source theory, original technology research, and demonstration in the field of unmanned farms. Research in quantitative decisionmaking, intelligent control, precise input, and personalized agricultural production and operation are essential to achieve accurate perception. This comprehensive improvement in automation,intelligence, and environmental sustainability of agricultural production marks the future development trajectory of unmanned farms.