
旋转稳定弹道修正弹扰流片气动参数辨识研究
2023-09-03 07:20常思江
兵器装备工程学报 2023年8期
杨 鹏, 常思江, 魏 伟
(1.南京理工大学 能源与动力工程学院, 南京 210094;2.北京理工大学 爆炸科学与技术国家重点实验室, 北京 100081; 3.瞬态冲击技术重点实验室, 北京 102202)
0 引言
随着现代化战争和科学技术的发展,对炮弹的精度提出了更高的要求,因此常规弹药制导化改造是武器发展的必然趋势。其中,弹道修正弹是在常规弹药的基础上加装弹道修正模块,通过雷达或GPS探测到的弹丸位置信息,根据实际弹道与理想弹道的偏差量大小来控制安装在炮弹上的修正执行机构,从而实现距离修正或方向修正[1]。扰流片作为一种新型弹道修正执行机构具有体积小、结构简单、成本低等优点,受到国内外相关研究机构和学者的关注。
目前,国内外对带扰流片旋转稳定弹的研究涉及气动特性[2-3]、动力学建模[4]、扰流片结构优化[5-6]等多个方面,但针对该类修正弹扰流片气动参数辨识的研究却较为缺乏。文献[7]提出一种将最速下降法、拟牛顿法、蚁群算法、差分进化算法等9种优化算法相结合的“元优化”智能算法,对炮弹扰流片相关参数进行辨识,但研究对象为尾翼稳定弹,其动力学特性与旋转稳定弹相差较大。从应用角度,根据实际飞行试验数据辨识气动参数,是诸多获取气动参数方法中精度最高、最接近实际状况的;从弹箭设计与研制角度,必须准确获取其关键气动参数。因此,拟针对带扰流片旋转稳定弹的气动参数辨识问题开展研究。
目前,工程上应用较多的参数辨识算法是极大似然法。在20世纪,美国研究人员基于极大似然法开发了一套弹道数据分析系统ARFDAS(aeroballistic research facility data analysis system),并且由此开展了参数辨识工作[8]。但极大似然法一般采用基于梯度的牛顿迭代来实现参数辨识,这种基于梯度的方法容易陷入局部最优,甚至无法求取梯度值,给气动参数辨识带来了较大困难。随着智能优化算法的快速发展,类似于粒子群算法(PSO)、差分进化算法(DE)和遗传算法(GA)等因具有鲁棒性强、不易陷入局部最优的优点,在参数辨识方面得到了广泛的应用。BURCHET[9]分别将梯度法和进化算法应用于某弹丸的气动参数辨识,结果表明,这2种方法都能满足辨识需求,但进化算法的精度更高。刘洋等[10]采用差分进化算法对多发弹气动参数进行联合辨识,结果表明,该方法具有良好的收敛性和稳定性,适用于数据量较大的辨识问题。此外,在文献[7]所构建“元优化”算法中,与其他全局优化算法相比,差分进化的性能最佳。
考虑到差分进化算法的良好性能,结合本文中的研究对象特点,拟以差分进化算法为基础,为带扰流片旋转稳定弹构建适配的气动参数辨识方案,对扰流片的附加轴向力系数ΔCA、附加法向力系数ΔCN以及附加静力矩系数ΔCM3个参数进行辨识,以期为后续开展该类修正弹的工程研制提供基础。
1 参数辨识用动力学模型
1.1 飞行动力学模型
本文中以某155 mm带扰流片旋转稳定弹为对象,模型如图1(a)所示。该弹丸由前体(弹体)和后体(船尾)2部分组成,后体上装有扰流片控制机构,如滚动轴承、减速反旋电机、滑轨机构等,两部分通过轴承连接,可差动旋转。无控飞行时,扰流片收缩在控制舱内,当收到修正指令后,后体通过反旋电机使后体减旋直至保持空间位置相对静止,扰流片弹出舱体,提供所需的控制力和力矩,完成弹道修正[3]。
图1 带扰流片旋转稳定弹的结构及相关定义
扰流片产生的附加力和力矩由式(1)—式(3)给出。
(1)
式中:Fcx1、Fcy1为扰流片的轴向力和法向力;ρ为空气密度;S为特征面积;v为弹丸速度;vr为弹丸的相对速度;ΔCA为附加轴向力系数;ΔCN为附加法向力系数。
(2)

(3)
式中:D为特征长度(本文取弹径);Mcξ、Mcη、Mcζ为扰流片产生的控制力矩在弹轴坐标系[11]中的分量;ΔCM为附加静力矩系数。
将扰流片产生的附加力和力矩模型合并到6自由度刚体弹道模型[11]中,得到该弹道修正弹的动力学模型为
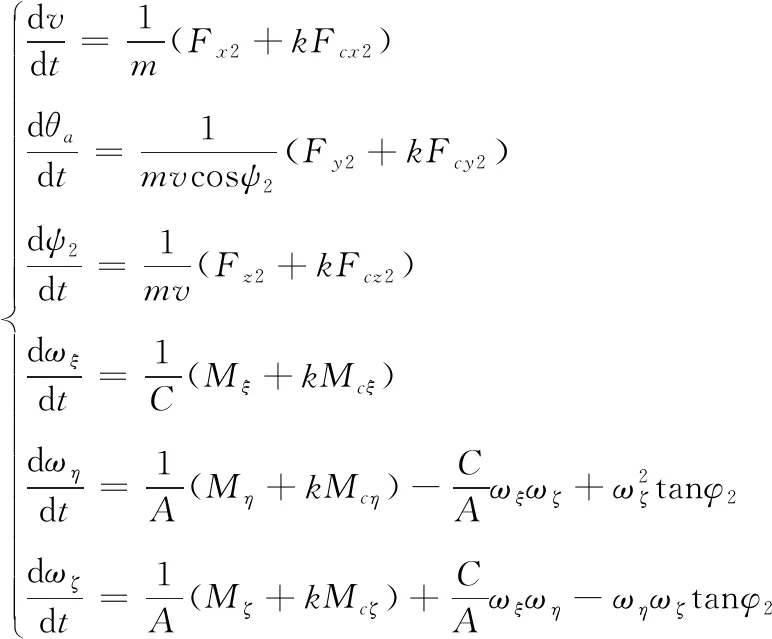
(4)
式中:t为弹丸飞行时间;无控时k=0,有控时k=1;θa为弹道倾角;ψ2为弹道偏角;φ2为弹轴方位角;Fx2、Fy2、Fz2为无控时的合外力在弹道坐标系的分量;ωξ、ωη、ωζ为角速度在弹轴坐标系的分量;Mcξ、Mcη、Mcζ为无控时的合外力矩在弹轴坐标系的分量;C为极转动惯量;A为赤道转动惯量。
2 扰流片参数辨识方案及流程
一般而言,参数辨识主要由5个部分组成:测量数据预处理、数学模型、辨识算法、目标函数和辨识结果后处理。对于扰流片参数辨识,测量数据为辨识所使用的弹道数据,这些数据既可以是实测飞行弹道数据,也可以是数值仿真弹道数据[8];数学模型为第1节中建立的飞行动力学模型;辨识算法和目标函数是根据差分进化算法所设计的;辨识结果后处理是对辨识所得结果进行曲线平滑、插值等处理。
2.1 差分进化算法
差分进化算法(DE)是一种进化计算技术,通过种群内个体间的合作与竞争而产生的智能优化搜索方法,适合于多变量优化,且具有较强的全局收敛能力和鲁棒性。
差分进化算法主要由“变异”、“交叉”和“选择”3部分构成。其基本步骤可描述为[10]:
1) 根据实际需要确定相关的参数。主要包含:种群大小N,粒子的维度D,变异算子F,交叉算子CR,最大进化代数Tm和粒子搜索范围等。
2) 种群初始化。在每个粒子的搜索范围内随机产生N个D维的初始粒子xi=(xi1、xi2、…、xiD),i=1,2,…,N。
3) 变异。差分进化种群的“变异”遵循式(5):

(5)
式中:d为待变异的个体;T为进化次数;r1≠r2≠r3≠r4,F为变异算子。变异算子主要影响算法的全局寻优能力,F越大算法对全局搜索能力越强。本文采用一种自适应变异算子,为
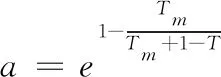
(6)
F=F0·2a
(7)
式中:F0为变异缩放因子;T为当前迭代次数;Tm为最大迭代次数。在算法运行开始阶段,变异算子F值较大,具有较好的全局搜索能力。随着迭代的进行,变异算子逐渐降低并接近F0以加强算法在后期的局部搜索能力,有利于找到最优值,通过试算,本文F0取0.4。
4) 交叉。在种群初始向量和变异向量中采用二项式交叉生成试验向量w,表达式如下

(8)
式中:j=1,2,…,D;i=1,2,…,N。
5) 选择。将试验向量w和目标向量x的目标函数相比较,具有较小目标函数值的向量被选择在下一代中。
2.2 扰流片参数辨识模型
参数辨识的过程就是寻找一组满足约束要求的待辨识参数,使得目标函数的值最小。考虑到各参数对弹道的影响,本文选取扰流片附加轴向力系数ΔCA、附加法向力系数ΔCN和附加静力矩系数ΔCM为待辨识参数,建立扰流片气动参数辨识模型。
待辨识的参数向量可表示为
θ=[ΔCAΔCNΔCM]
(9)
一般在辨识中所用的测量数据有弹丸的速度、射高、射程、侧偏、转速以及攻角等。实际应用中,弹丸的转速可由弹载地磁传感器测得[11],弹丸的速度和空间方位可通过弹道跟踪雷达测得[12],弹丸的攻角可由弹载攻角传感器测得[13]。
因此,本文所使用的测量数据为

(10)

采用最小二乘准则,则目标函数为
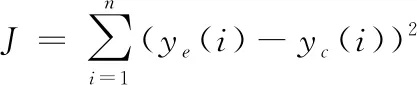
(11)
式中:J为目标函数值;ye(i)为实际测量值;yc(i)为由辨识参数计算的测量值。
2.3 参数辨识流程
根据上述方案,可构建扰流片气动参数辨识的具体流程,如图2所示。
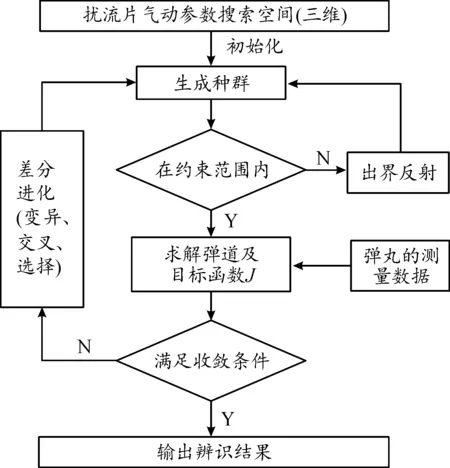
图2 辨识流程图
辨识流程如下:首先在每个待辨识参数搜索空间中随机生成一组种群,将其作为初值进行6自由度弹道解算并计算目标函数值,之后进行收敛条件判断,若满足收敛条件则输出辨识结果,反之进行差分进化过程,随后重复上述过程,直至达到收敛条件后输出辨识结果。
在辨识过程中,因为待辨识参数在其相应的搜索空间中随机生成,所以每一次辨识的初值都不相同(具有随机性),这也说明该方法对初值的要求不高。当搜索空间的维度较多时,应适当增大种群数量,可以增大搜索到全局最优值的概率。本文的待辨识参数为3个,即搜索空间为三维,为增加种群的多样性且考虑计算效率,种群规模设置为30。在个体进行“变异”后,若个体超出其维度的搜索空间时,则在该维度上增加“出界反射”的边界约束,将其“反射”回来,以提高计算效率。反射公式为

(12)
式中:M为待辨识参数的搜索空间。
考虑到全局优化的要求,采取如下辨识收敛准则[10]
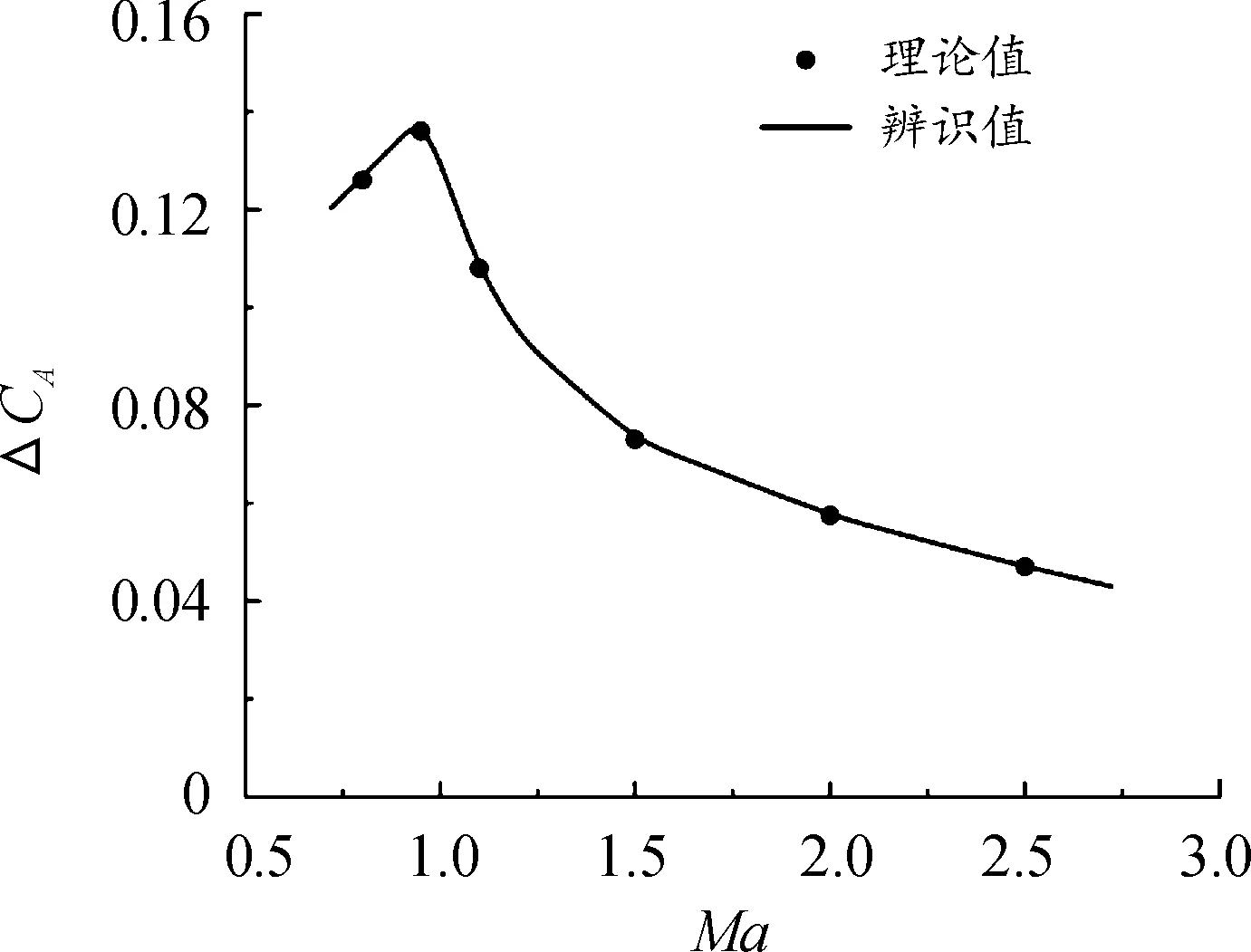
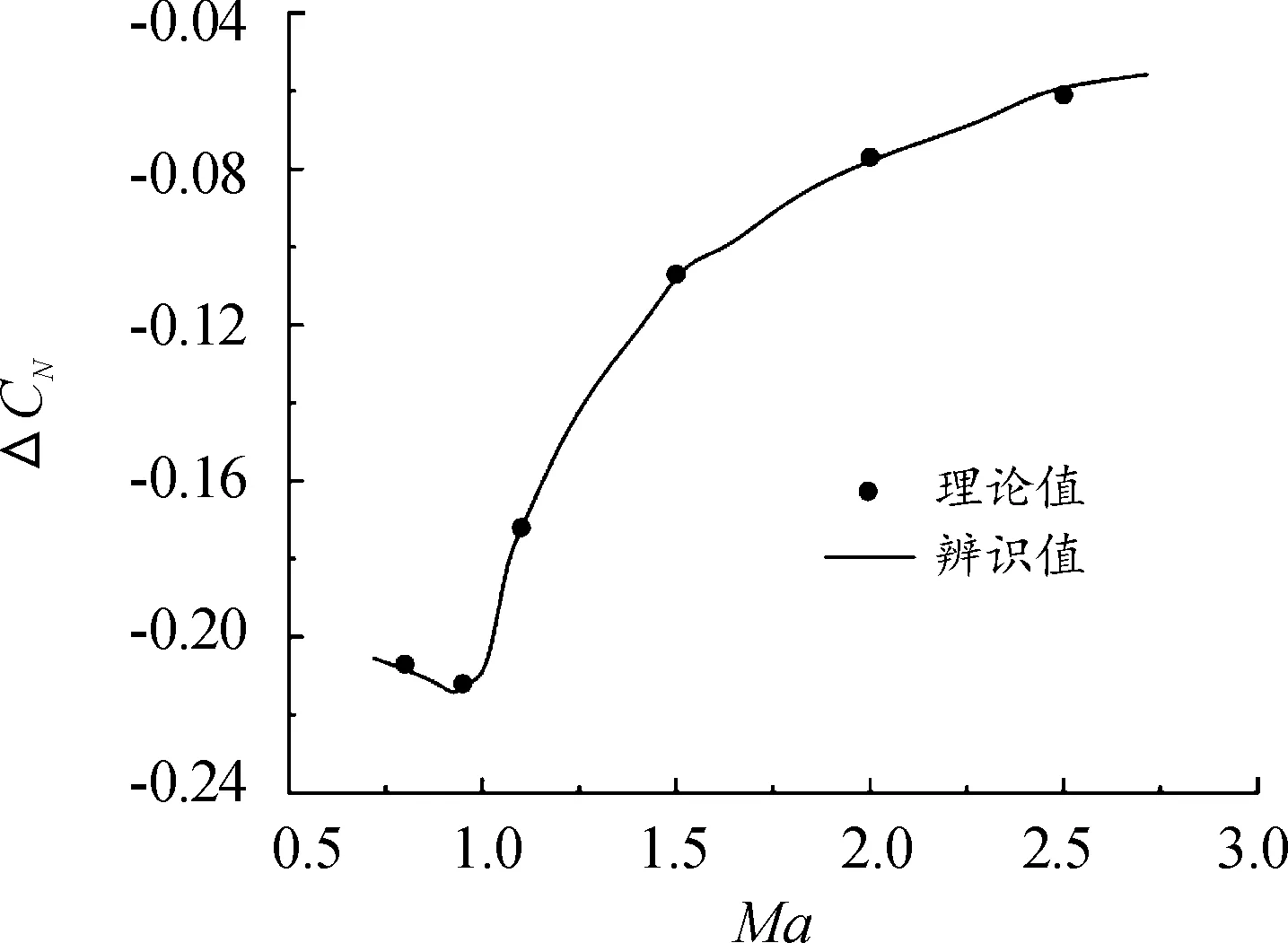
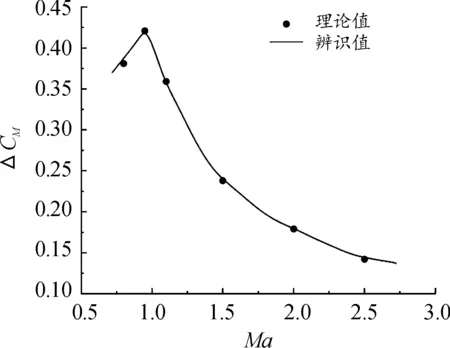
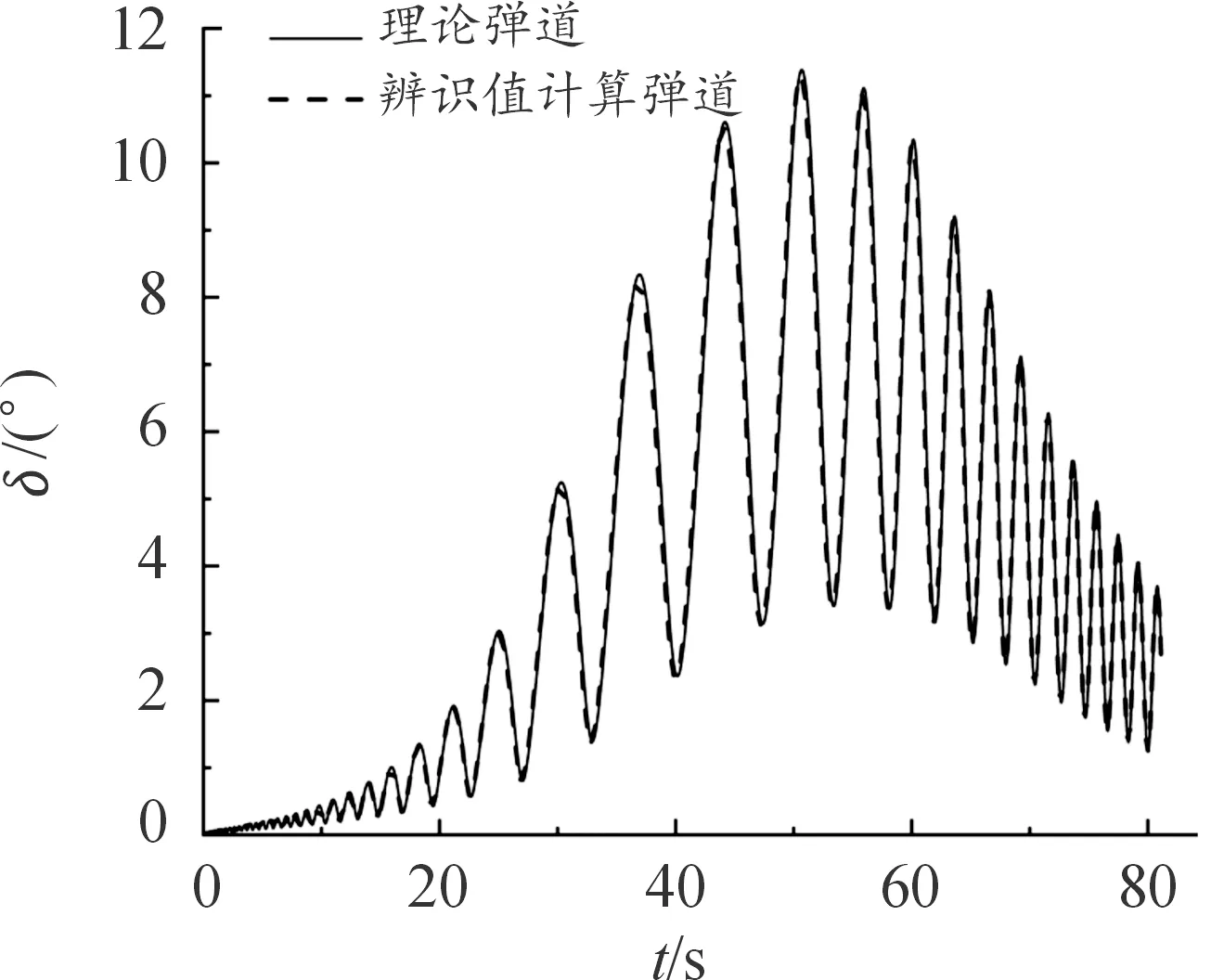
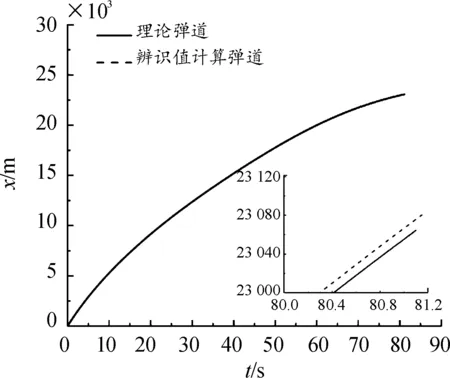
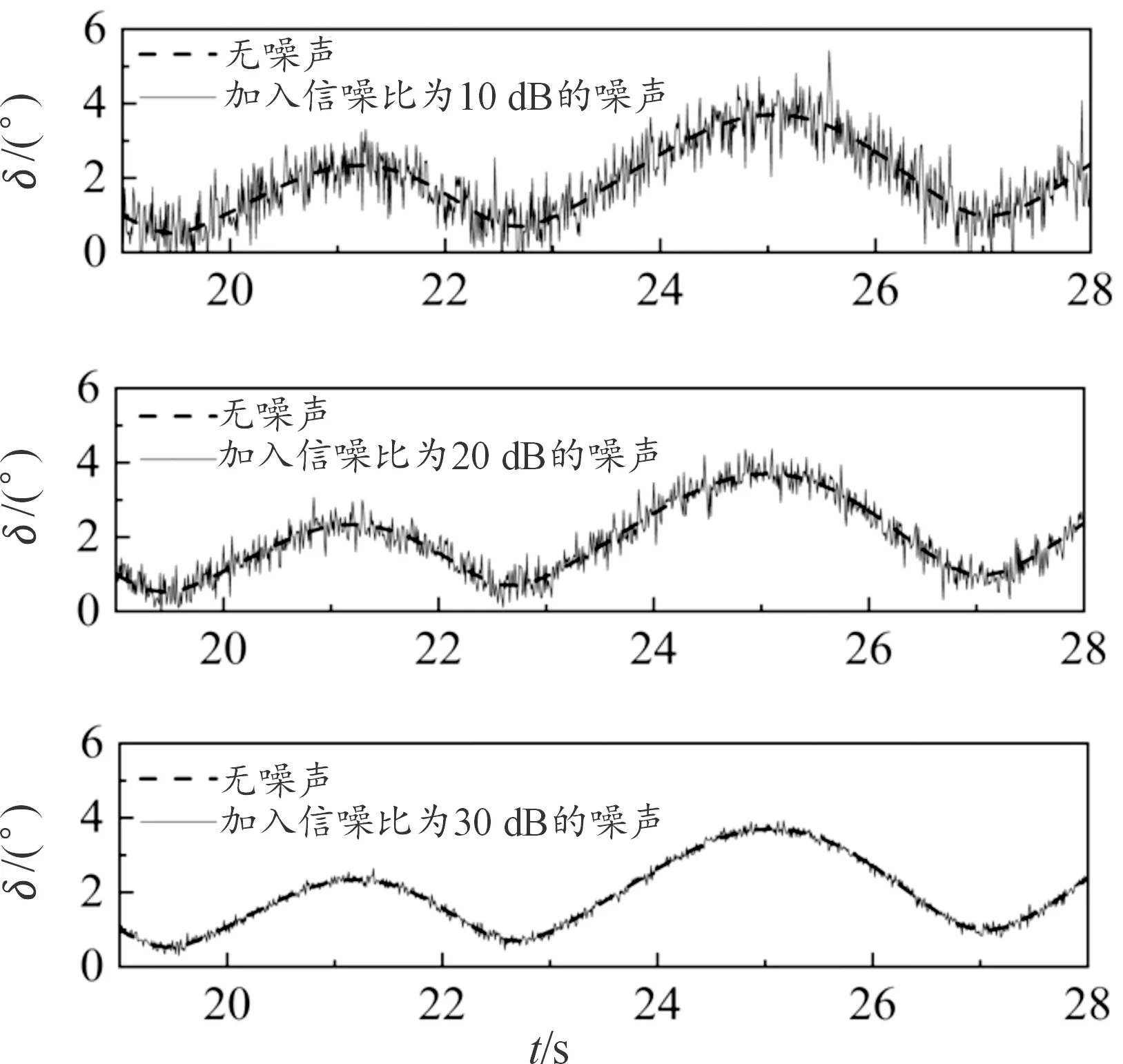
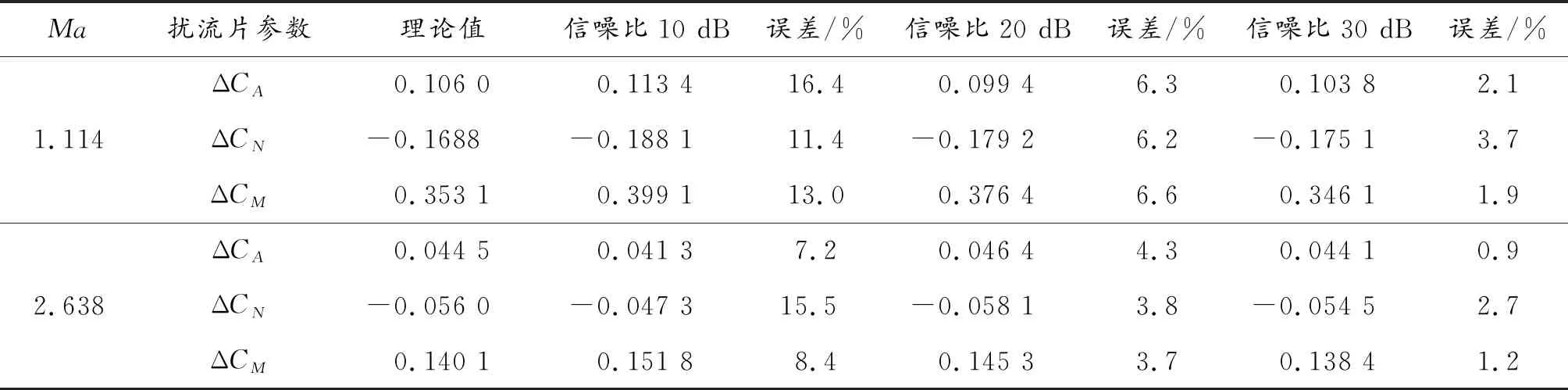
|JT+1-JT| (13) (14) 式中:JT+1表示目标函数第T+1次迭代值;i表示某一维度:σ2()表示取方差;E()表示均值;通过大量试算,取B1=10-5,B2=10-3。 一般来说,从弹丸实际飞行数据中辨识出的气动参数是精度最高的,但这会花费很高的成本,尤其是对于一些新型弹丸。目前,为了更高效地研究气动参数辨识算法,越来越多的研究人员采用仿真弹道数据进行辨识算法的验证工作,为后续算法的实际应用提供参考[10,14]。基于这一思路,本文拟使用仿真弹道数据开展扰流片气动参数辨识工作,以验证上述辨识方案的可行性。 以某已知气动参数的带扰流片155 mm旋转稳定弹为对象,利用第1节所述动力学模型生成仿真弹道数据,作为辨识的输入数据,并参考文献[7]的处理方式,将扰流片气动参数与无控弹气动参数分开考虑,仅辨识扰流片气动参数。 弹道仿真采用炮兵标准气象条件[11],取初速为930 m/s,射角45°,并假设扰流片弹出后,其方位角ψc保持为常数(即弹体向固定的方位进行修正),本文中取ψc=0°。为了尽可能获得较宽马赫数范围的扰流片气动参数,假设扰流片在t=0 s时刻弹出舱体,模拟弹道的马赫数覆盖范围约为0.75~2.75,并且在马赫数变化的小范围内,可用式(15)来计算相应的气动参数 (15) 式中:Cm和Cn为某一马赫数范围内气动参数的上、下限;Mam和Man为某一马赫数范围的上、下限。 以相对误差来衡量扰流片气动参数的辨识误差,表达式如下 (16) 式中:η为相对误差;ΔCt为扰流片气动参数的理论值;ΔCi为扰流片气动参数的辨识值。 扰流片参数的辨识结果如图3—图5所示。从图中可以看出,本文中所构建的辨识方案可以有效对扰流片参数气动进行辨识。 图3 附加轴向力系数辨识结果 图4 附加法向力系数辨识结果 图5 附加静力矩系数辨识结果 3.2.1弹道曲线对比 仍取第3.1节中弹道条件,将辨识结果代入弹道方程(4)重新计算弹道,并将弹道计算结果与气动参数理论值计算的弹道进行对比,进一步量化辨识结果的准确性。 图6和图7分别给出了用理论值和辨识值所计算的弹丸攻角和射程曲线。从图中可以看出,两者计算出的弹道曲线基本一致,用理论值计算的弹道落点为(23 064.4, 0, 992.9),用辨识值计算的弹道落点为(23 080.4, 0, 992.9),落点距离相差约16 m,可以看出本文中所构建辨识方案有较高的准确性。 图6 攻角对比图 图7 射程对比图 图8 加入噪声后的攻角曲线 同样采用第二节描述的辨识方案,并分别选取跨声速和超声速的两段数据进行辨识,辨识结果如表1所示。 表1 加入噪声后的辨识结果 从表1中可以看出,在含有较小噪声的情况下,该算法仍有较高的辨识精度。因此,在工程应用上,对获得的飞行试验数据进行降噪预处理可在一定程度上提高气动参数辨识的精度。 为了保证上述方法的可靠性和普适性,本节分别采用低射界射击弹道(20°射角)和高射界射击弹道(60°射角)进行仿真验证。 选取时间为20~20.1 s内的10组数据,除射角外其余仿真条件和3.1节相同。其中20°射角时,该段马赫数取均值为Ma=1.111,60°射角时,该段马赫数取均值为Ma=1.203。辨识结果如表2和表3所示。 表2 20°射角下的辨识结果 表3 60°射角下的辨识结果 从表2和表3可以看出,在不同射角下,扰流片气动参数的辨识值仍有较高精度,误差均小于2%,说明了在不同射击条件下,本文中所提出的方法依然有效。 以带扰流片旋转稳定弹为研究对象,以带自适应变异算子的差分进化算法为基础,构建了扰流片气动参数的辨识方案,经仿真验证可得以下初步结论: 1) 本文所构建的参数辨识方案可有效地辨识出扰流片的气动参数,并且对初值选取的要求不高,有较好的通用性,可以满足工程需要。 2) 当使用含有噪声的测量数据时,本文方案仍有较好的辨识精度,且噪声越小、辨识精度越高。 后续研究中,可以使用实际飞行数据来进一步验证和改进本文所提出的辨识模型和算法,以更加适应工程应用的需求。
3 仿真研究及结果分析
3.1 仿真条件


3.2 辨识结果分析
3.3 含噪声条件下的辨识结果

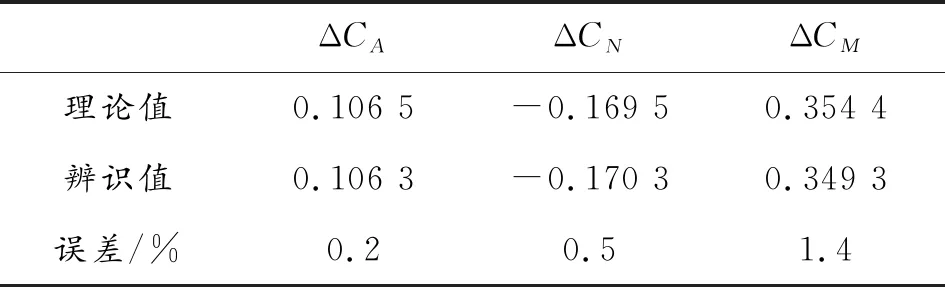
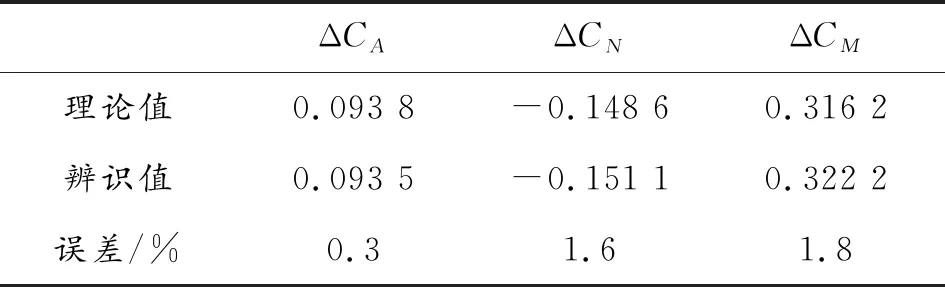
3.4 不同射角条件下的辨识结果
4 结论
猜你喜欢
中国水利水电科学研究院学报(2023年1期)2023-03-14
广东石油化工学院学报(2022年4期)2022-09-13
小学生必读(中年级版)(2021年12期)2021-12-02
数字海洋与水下攻防(2021年4期)2021-09-08
固体火箭技术(2021年3期)2021-07-15
探测与控制学报(2020年4期)2020-09-02
船舶力学(2019年7期)2019-07-30
空气动力学学报(2019年2期)2019-05-08
测井技术(2018年5期)2018-12-26
弹箭与制导学报(2015年1期)2015-03-11
