
基于线性卡尔曼滤波器的加香工序数据降噪算法
2023-08-28 13:12赵培成李春华叶飞史清英孙绍波祁跃东李林蔚
烟草科技 2023年8期
赵培成,李春华,叶飞,史清英,孙绍波,祁跃东,李林蔚
红塔烟草(集团)有限责任公司玉溪卷烟厂,云南省玉溪市红塔区红塔大道118号 653100
加香工序是制丝生产过程中的重要环节,通过加香机使香精按照工艺配方要求的比例均匀喷洒在物料上,以弥补叶组配方不足,使卷烟香气和吸味保持稳定,提高卷烟的燃吸品质[1]。香精瞬时流量和出口含水率是加香工序的重要工艺指标,直接影响到制丝批次质量的判定。加香机控制系统在数据采样过程中存在过程噪声和测量噪声,目前工业控制领域普遍采用滑动窗口平均值滤波和低通滤波的方法进行滤波处理,但这两种方法仅具有数据平滑功能而没有降噪作用[2],由此影响到系统控制过程的可靠性和稳定性[3]。卡尔曼滤波器作为一种最优估计方法适用于受随机干扰的动态系统,通过迭代计算的方法依据实时获得的包含噪声的数据对系统状态进行线性、无偏及最小误差方差的最优估计。近年来卡尔曼滤波器在复杂实时系统中已得到推广应用,利用卡尔曼滤波器实现数据降噪算法也已开展大量研究。杨超等[4]基于卡尔曼滤波建立一种温度测井数据降噪方法,解决了滑动平均值滤波导致测井曲线识别能力下降等问题;曾俊然等[5]基于卡尔曼滤波建立一种粘缝机温度控制系统,解决了低通滤波需要根据实际对象手动调整权值的问题;熊磊等[6]基于卡尔曼滤波的PID控制在PLC中应用,能够有效滤除噪声,减少超调量;陈树等[7]基于卡尔曼滤波的WSN(wireless sensor networks)对发酵温度数据进行处理,满足了工业生产对数据精度的要求;于洋等[8]基于卡尔曼滤波对电磁流量计信号进行处理,降低了噪声影响,提高了测量结果可靠性;姚连国等[9]基于卡尔曼滤波器-PID建立一种水泥磨出口温度控制系统,降低了噪声对控制性能的影响。但基于卡尔曼滤波器实现加香工序数据降噪的研究则鲜见报道。为此,设计了基于线性卡尔曼滤波器的加香工序数据降噪算法,通过状态值和测量值从噪声中提取信号,并采用迭代计算方法解决线性滤波问题,以期提高加香机控制系统的可靠性和稳定性。
1 问题分析
1.1 存在问题
加香机主要由前室、滚筒、排潮风机、后室、滚筒电机、机架等部分组成[10],见图1。香精瞬时流量既有反馈环节又有控制环节,通过加香段PLC程序将香精瞬时流量设定值与测量值经过PID运算后得到输出值,利用输出值通过变频器控制加香泵转速,再利用流量计采样后得到测量值。而出口含水率只有反馈环节没有控制环节。在PLC数据采集过程中因存在过程噪声和测量噪声,流量计和水分仪测量值经常会出现信号不稳定、连续波动、跳变过快等情况,从而影响PLC系统的控制精度。
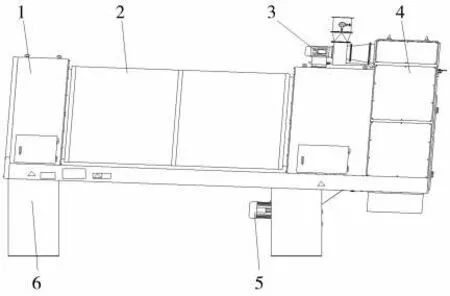
图1 加香机结构示意图Fig.1 Structure of flavoring cylinder
1.2 原因分析
噪声是指在采集数据中对系统无贡献或具有干扰作用的数据,在通信时噪声表现为特定波段频率或杂波,在传感器采集数据时噪声表现为幅度干扰。噪声是一个随机过程,而随机过程有其功率谱密度函数,函数形状决定了噪声特征。大多数传感器的测量噪声均为高斯白噪声,具体特征表现为噪声幅度服从高斯分布,噪声功率谱密度服从均匀分布[3]。噪声产生的原因较为复杂,分为电磁辐射干扰、热辐射干扰、机械振动干扰、接地回路干扰、内部干扰等,噪声在信号的传输和测量过程中会介入到系统中。加香工序PLC控制系统中存在过程噪声和测量噪声,采用滑动窗口平均值滤波和低通滤波的方法进行降噪处理效果不佳,导致流量计和水分仪的测量值出现信号波动等问题。
2 系统设计
2.1 多维线性卡尔曼滤波器
卡尔曼滤波的核心是通过状态值和测量值从噪声中提取信号,并采用迭代计算的方法解决线性滤波问题,在迭代计算过程中需要的存储空间较小[3]。如公式(1)所示,多维线性卡尔曼滤波公式包括系统状态方程、系统测量方程、状态预测方程、协方差预测方程、卡尔曼增益方程、状态更新方程以及协方差更新方程。
式中:X(k)为k时刻的状态值;Φ为状态转移矩阵;X(k-1)为k-1时刻的状态值;Γ为噪声驱动矩阵;W(k-1)为k-1时刻的过程噪声矩阵;Z(k)为k时刻的测量值;H为测量矩阵;V(k)为k时刻的测量噪声矩阵;X(k|k-1)为k时刻的状态预测值;X(k-1|k-1)为k-1时刻的状态更新值;P(k|k-1)为k时刻的协方差预测值;P(k-1|k-1)为k-1时刻的协方差更新值;Q为过程噪声矩阵的协方差;K(k)为k时刻的卡尔曼增益;R为测量噪声矩阵的协方差;X(k|k)为k时刻的状态更新值;P(k|k)为k时刻的协方差更新值;In为单位矩阵。
2.2 一维线性卡尔曼滤波器
对于一维数据,矩阵简化为标量,协方差简化为方差,故公式(1)中的Φ、Γ、H、In均为1。如公式(2)所示,一维线性卡尔曼滤波公式中,通过对比实验可获得过程噪声的方差Q,通过传感器说明书可获得测量噪声的方差R。
2.3 线性卡尔曼滤波PLC程序架构
依据公式(2)设计线性卡尔曼滤波PLC程序,控制流程图见图2。硬件平台采用西门子S7-1500PLC,软件平台采用西门子博图V16,卡尔曼滤波功能程序为FC300,在主程序OB1中循环调用[11]。考虑到设备调试时停止滤波可以观察到原始数据,因此设置了是否启动滤波。线性卡尔曼滤波PLC程序包括3部分:滤波启动时初始化、滤波停止时赋值、卡尔曼滤波迭代计算[12]。
2.4 线性卡尔曼滤波PLC变量声明
如图3所示,PLC变量声明包括Input变量、InOut变量和Temp变量3部分。①Input变量:start为滤波启动,pulse为采样脉冲,Z(k)为测量值,Q为过程噪声的方差,R为测量噪声的方差,X(0|0)为状态更新初始值,P(0|0)为方差更新初始值。②InOut变量:store为上升沿存储,X(k|k)为状态更新值,P(k|k)为方差更新值。③Temp变量:initialize为初始化,X(k|k-1)为状态预测值,P(k|k-1)为方差预测值,K(k)为卡尔曼增益。
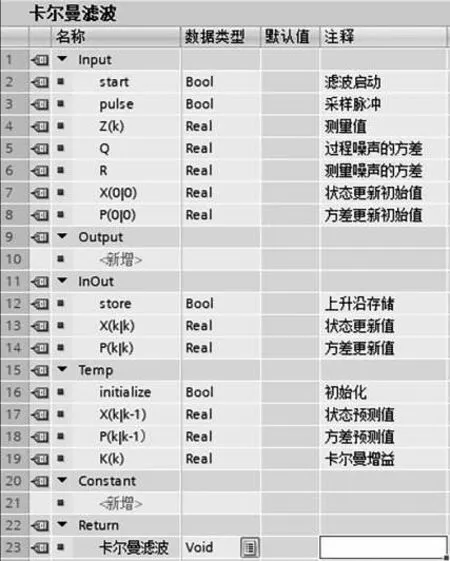
图3 PLC变量声明Fig.3 PLC variable declaration
2.5 线性卡尔曼滤波PLC程序算法
基于西门子SCL(Structured Control Language)语言设计PLC程序算法。SCL语言属于PLC国际编程标准IEC 61131-3中的结构化文本语言,语法简洁、功能强大,适合处理复杂的算法[13]。程序第一部分功能是滤波启动时初始化,程序段见图4。变量#store用于储存上一扫描周期变量#start的信号,当检测到变量#start当前扫描周期信号为1且上一扫描周期信号为0时认为变量#start触发上升沿。当变量#start触发上升沿时变量#initialize接通一个扫描周期进行数据初始化,将变量#X(0|0)的值赋给变量#X(k|k),变量#P(0|0)的值赋给变量#P(k|k)。
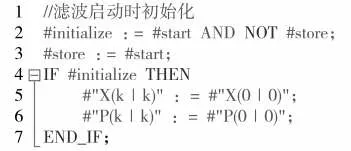
图4 滤波启动时初始化Fig.4 Initialization at the start of filtering
程序第二部分功能是滤波停止时赋值,程序段见图5。变量#start为0时,程序不启动卡尔曼滤波,将变量#Z(k)的值赋给变量#X(k|k)。
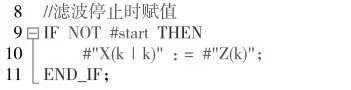
图5 滤波停止时赋值Fig.5 Assignment at the finish of filtering
程序第三部分功能是卡尔曼滤波迭代计算,程序段见图6。变量#start和变量#pulse为1时,开始卡尔曼滤波迭代计算。变量#X(k|k)赋值给变量#X(k|k-1)实现状态预测方程的计算,变量#P(k|k)与变量#Q计算后赋值给变量#P(k|k-1)实现方差预测方程的计算,变量#P(k|k-1)与变量#R计算后赋值给变量#K(k)实现卡尔曼增益方程的计算,变量#X(k|k-1)与变量#K(k)、变量#Z(k)计算后赋值给变量#X(k|k)实现状态更新方程的计算,变量#K(k)与变量#P(k|k-1)计算后赋值给变量#P(k|k)实现方差更新方程的计算。
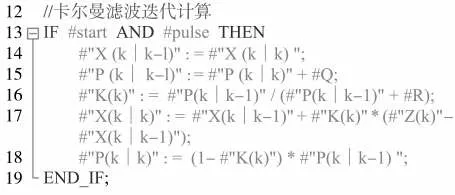
图6 卡尔曼滤波迭代计算Fig.6 Iterative computation of Kalman filtering
2.6 加香工序数据降噪结构
2.6.1 香精瞬时流量数据降噪结构
如图7所示,在原有香精瞬时流量控制环节和反馈环节的基础上增加卡尔曼滤波环节,利用状态值代替测量值。在PLC程序中设定值与状态值经过PID运算后得到输出值,利用输出值通过变频器控制加香泵转速,流量计采样后得到测量值,测量值经过卡尔曼滤波后得到状态值。PID控制器的参数选择KP=3.0,KI=30.0,KD=0.0,无微分调节[14]。
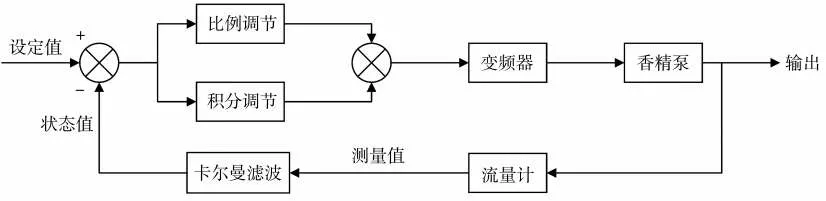
图7 改进后香精瞬时流量数据降噪结构Fig.7 Control principle of data noise reduction of instantaneous flavoring flow rate after modification
2.6.2 出口含水率数据降噪结构
如图8所示,在原有出口含水率反馈环节基础上增加卡尔曼滤波环节。在PLC程序中水分仪采样后得到测量值,测量值经过卡尔曼滤波后得到状态值。

图8 改进后出口含水率数据降噪结构Fig.8 Control principle of data noise reduction of moisture content in output tobacco after modification
2.6.3 硬件方面的保障措施
为保证卡尔曼滤波算法的降噪效果,系统硬件方面配置相应保障措施。一是保证PLC系统PE接线端接地可靠,抑制外来电磁干扰;二是在PLC系统的供电部分加装隔离变压器,使一次侧与二次侧的电气完全绝缘;三是在模拟量信号通道中安装磁环,抑制高频噪声;四是模拟量信号与动力线分开布线,避免信号传输过程中被干扰;五是选用4~20 mA电流型模拟量信号并使用屏蔽双绞线,减少信号衰减和噪声[15]。
3 应用效果
3.1 实验设计
材料:“玉溪(软)”牌卷烟混合丝,入口含水率为(13.1±0.3)%[红塔烟草(集团)有限责任公司玉溪卷烟厂提供]。
设备与仪器:YS33型加香机(昆明船舶设备集团有限公司);K65E型电子皮带秤(精度0.5%,昆明船舶设备集团有限公司);83A04型流量计(精度0.1%,德国E+H公司);TM710e型水分仪(精度0.1%,美国NDC公司)。
方法:YS33型加香机物料瞬时流量设定值为10 000.0 kg/h,香精瞬时流量设定值为33.45 kg/h,出口含水率设定值为(13.1±0.3)%。采用西门子WinCC数据采集与监视控制系统,分别采集加香机改进前后香精瞬时流量、出口含水率等数据,采集周期为1 s。将数据导入SPSS软件进行分析,得到平均值、中位数、标准差以及变异系数,再将数据导入Origin生成折线图[16]。
料中阶段(测量值上升至设定值95%到测量值下降至设定值95%的时间段)数据较为平稳,采用统计学指标衡量效果;料头阶段(批次开始到测量值上升至设定值95%的时间段)和料尾阶段(测量值下降至设定值95%到批次结束的时间段)数据波动较大,采用折线图衡量效果。香精瞬时流量的料尾时间较短,出口含水率的料头时间较短,两者对制丝批次质量判定的影响较小。因此,采用料中和料头阶段数据验证香精瞬时流量,采用料中和料尾阶段数据验证出口含水率。
3.2 数据分析
3.2.1 香精瞬时流量数据降噪效果
由表1可见,应用卡尔曼滤波降噪结构后,香精瞬时流量料中阶段标准差由0.359 5 kg/h降低至0.162 4 kg/h,下降54.83%;变异系数由1.074 6%降低至0.485 3%,下降54.84%。表明系统对香精瞬时流量的控制稳定性得到提高。由图9可见,香精瞬时流量料头阶段降低超调量的同时提高了平滑度。

表1 香精瞬时流量料中阶段数据降噪效果Tab.1 Data noise reduction effect of instantaneous flavoring flow rate at the middle stage
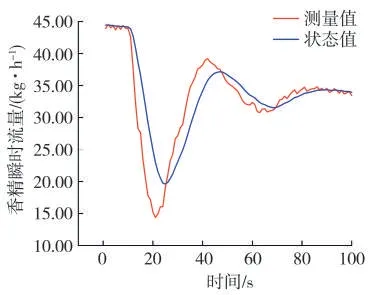
图9 香精瞬时流量料头阶段数据降噪效果Fig.9 Data noise reduction effect of instantaneous flavoring flow rate at the initial stage
3.2.2 出口含水率数据降噪效果
由表2可见,应用卡尔曼滤波降噪结构后,出口含水率料中阶段的标准差由0.065 3%降低至0.031 9%,降低51.15%;变异系数由0.503 8%降低至0.246 1%,降低51.15%。表明系统对出口含水率的控制稳定性得到提高。由图10可见,出口含水率料尾阶段降低超调量的同时提高了平滑度。
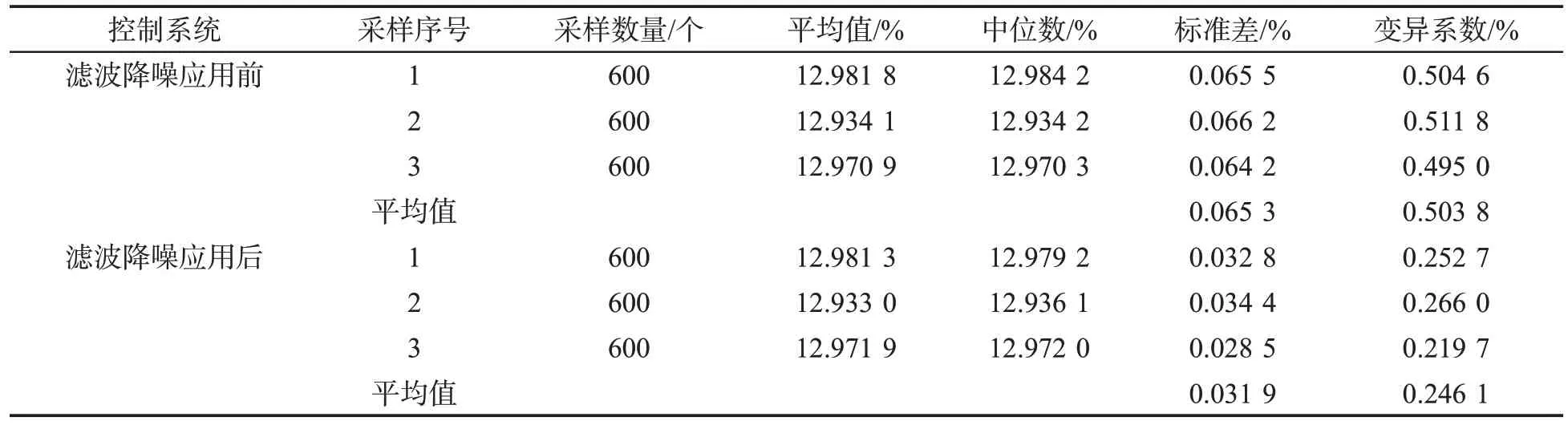
表2 出口含水率料中阶段数据降噪效果Tab.2 Data noise reduction effect of moisture content in output tobacco at the middle stage
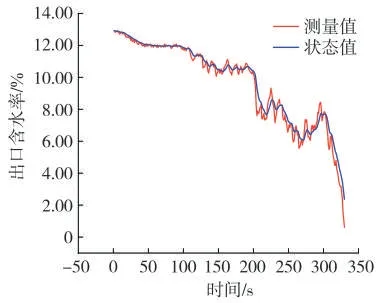
图10 出口含水率料尾阶段数据降噪效果Fig.10 Data noise reduction effect of moisture content in output tobacco at the finish stage
4 结论
基于线性卡尔曼滤波器工作原理和迭代计算方法,设计了一种用于加香工序的数据降噪算法。以玉溪卷烟厂生产的“玉溪(软)”牌号卷烟为对象进行测试,结果表明:采用线性卡尔曼滤波器进行数据降噪后,在料中阶段,香精瞬时流量标准差和变异系数分别降低54.83%和54.84%,出口含水率标准差和变异系数分别降低51.15%和51.15%;在料头和料尾阶段,香精瞬时流量和出口含水率,降低超调量的同时提高了平滑度。通过线性卡尔曼滤波器的数据降噪算法,保证了数据准确性,满足了工艺质量要求。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
云南化工(2021年7期)2021-12-21
中学生数理化·高一版(2021年2期)2021-03-19
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
东方企业家(2018年4期)2018-04-19
北京航空航天大学学报(2017年9期)2017-12-18
电源技术(2016年9期)2016-02-27
电源技术(2015年1期)2015-08-22
电子设计工程(2014年6期)2014-02-27
中国洗涤用品工业(2012年2期)2012-03-20
