
微结构影响下的表面润湿性检测实验系统开发
2023-08-22 07:47毛浩宇汪子悦吴占彬
实验室研究与探索 2023年5期
李 蓉,毛浩宇,汪子悦,吴占彬,陆 伟,孔 敏
(杭州电子科技大学机械工程学院,杭州 310018)
0 引 言
顺应精密智能仪器的发展需求,很多器件在运行过程中需要引入润滑液减小摩擦[1]、需要利用冷却液散热[2],如轴承、齿轮、刀具等;也有众多特殊仪器需要在各种液体环境下完成精准的运转、检测或存储等功能[3],如内燃机、人工心脏、海底探测器等。因此,为确保这些精密仪器、智能设备在液体环境下的工作性能及其可靠性,须进行器件材料及其表面润湿性的研究及设计[4]。
液体对固体表面的润湿能力通常可用接触角、滚动角以及三相接触线等方式表示,需要通过显像设备进行测量。研究表明,温度、材料表面微结构、材料属性和液体种类等因素都会改变构件表面的润湿:在散热系统中,高温下液体在散热表面的润湿性比常温状态时更大。在构件表面增设特定的微纳米结构可有效降低表面自由能,减小流体对构件表面的吸附,产生减阻效应[5]。具有柱形微结构的铜表面比光滑铜表面的换热系数能大幅提升沸腾传热效率[6]。通过优化构件表面的润湿性能,可以提升仪器的性能。在仪器间隙密封中,液体经过不同润湿性界面时,在固液交界处会产生不同的边界滑移,影响其流动状态和泄漏量,选取合适的界面有助于提高系统的密封性能[7]。针对工作环境中存在液体的高精密仪器,提升或优化仪器表面的润湿性,是其设计过程中不可忽视的内容,也是拓展推广智能仪器在油气开采、纺织工业、防水、防冰和生物医药等[8]行业中的应用过程中必须解决的技术问题。
检测机构表面润湿性涉及机械设计[9]、工程材料[10]、流体力学[11]、工程热物理[12]等多学科的知识,还涉及微纳加工技术[13]和界面工程[14]等技术领域的信息,是智能制造技术的重点。自德国植物学家Barthlott提出荷叶表面均匀分布的微米乳突是导致水滴在荷叶表面滚动的重要原因[15],在构件表面制备微纳级别的微结构已成为改变表面润湿的主要途径。
本文以带有不同微结构表面液滴接触角演变观测研究为背景,对比均匀分布和非均匀分布微结构表面润湿性,结合智能制造等多学科技术应用,拟设计一套精密温控、多倾斜角度、多液体工质下,固液界面接触角、滚动角和三相接触线检测及观测的实验系统[16]。以开展本科智能制造专业的基础性教学及研究生开展智能仪器设计相关的进阶型实验。
1 实验系统原理及特性
1.1 实验系统工作原理
精密温控、多倾斜角度、多液体工质下,固液界面接触角、滚动角和三相接触线检测及观测的实验系统总体结构如图1 所示,主要由检测件位置调整及基准定位模块,检测件表面倾斜角度控制模块,检测件表面转角控制模块,模糊PID 温度控制模块以及固液界面润湿性检测模块等部分组成。具体工作原理如下:

图1 实验系统总体结构示意图
(1)检测件位置调整及基准定位模块。PLC向伺服驱动器发送高速脉冲指令,伺服驱动器根据接受的脉冲信号和设置参数输出电压和电流,控制伺服电动机,驱动载板在高精密线性滑块导轨上移动。同时将编码器的信号与PLC的脉冲信号进行对比,实现载板在X、Y、Z3 个方向上精确定位和调整,实现基准定位。
(2)检测件表面倾斜角度控制模块。伺服驱动器接收PLC发送的脉冲指令并控制伺服电动机4 带动蜗轮蜗杆机构运动,使平台旋转到设定角度位置,编码器向PLC反馈角度值,形成1 个闭环控制,在电动机座上刻有分度值,便于直接观察倾斜角度。
(3)检测件表面转角控制模块。设定相应角度参数后,PLC发送高速脉冲指令,伺服驱动器带动伺服电动机5 控制旋转平台达到指定旋转角度位置,并实时反馈角度值。
(4)模糊PID温控工作模块。传热板的温度需要快速准确控制。传统的PID控制在参数设定之后是不变的。当被控对象温度需要稳定在一个温度范围时,PID控制就不具备自适应的特性。而模糊PID通过模糊逻辑算法推算出PID的3 个参数,并且3 个参数会随外界温度的变化自动调节,保证控制系统的稳定性。故采用模糊PID控制实现传热板的恒温控制,其控制原理如图2 所示。

图2 模糊PID控制原理
模糊PID 控制将定值与实际输出值的偏差的比例、积分、微分通过线性组合形成控制量,对被控对象进行控制,其控制的微分方程如下[16]:
式中:u为输出电压;e为温度误差;Kp、Ki、Kd分别为PID控制调节的比例系数、积分时间常数及微分时间常数。系统经过第1 次PID 控制后,得到温度误差e和温度误差率ec,温度误差和温度误差率经过模糊化处理,再进行模糊推理和反模糊化,得到PID参数Kp、Ki、Kd的变化量。这3 个变化量与之前初始的设定值相加后重新进行二次PID 调节,最终输出结果传给被控对象,整个系统是一个完整的闭环控制系统,可实现传热板温度的精准控制。
(5)固液界面润湿性检测模块。本实验系统可适用不同液体工质的检测。在旋转平台上放置具有不同微结构的材料测试件,滴加设定容量的液滴,观测测试件表面液滴呈现出不同的表观接触角θ(见图3)。

图3 表观接触角示意图
理解液滴对表面润湿的表现与实质对应联系。接触角滞后是液滴对表面润湿性的1 个重要指标,当液滴稳定在样品表面,转动倾斜平台,液滴刚要向下滚动时,液滴的前进接触角β 与后退接触角α之差为接触角滞后。通过拍摄倾斜平台倾斜时液滴将要滚动时两个接触角度之差(β-α)就得到接触角滞后的量化指标,且此时倾斜平台的倾角γ称之为滚动角,也是润湿性的评价指标之一,如图4 所示。倾斜平台倾斜一个角度后,液滴会滑落样品表面或者粘附在其表面且呈现的润湿状态是不同的。图5 所示为固液界面润湿性测量模块,采用高速显微相机可实时监测液滴滴落到检测件表面的整个润湿过程,实验系统采用2 个高速显微摄像机(高速相机1 位于液滴正上方,高速相机2位于液滴侧方),每秒拍摄80 张图片。液滴所在的测试件固定平台可实现360°旋转,结合平台的旋转角度,高速显微摄像机可以记录测试件表面液滴润湿过程的画面,提供多角度的接触角测量,并确保测量的准确性。
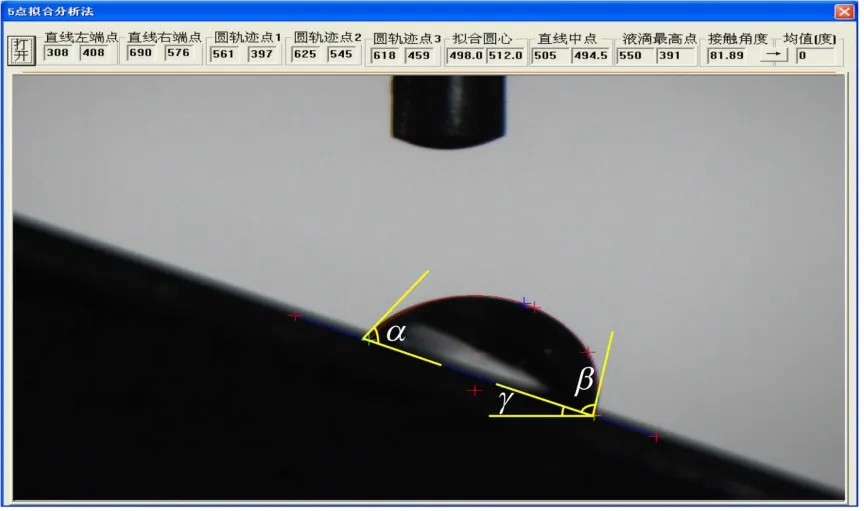
图4 接触角滞后及滚动角示意图
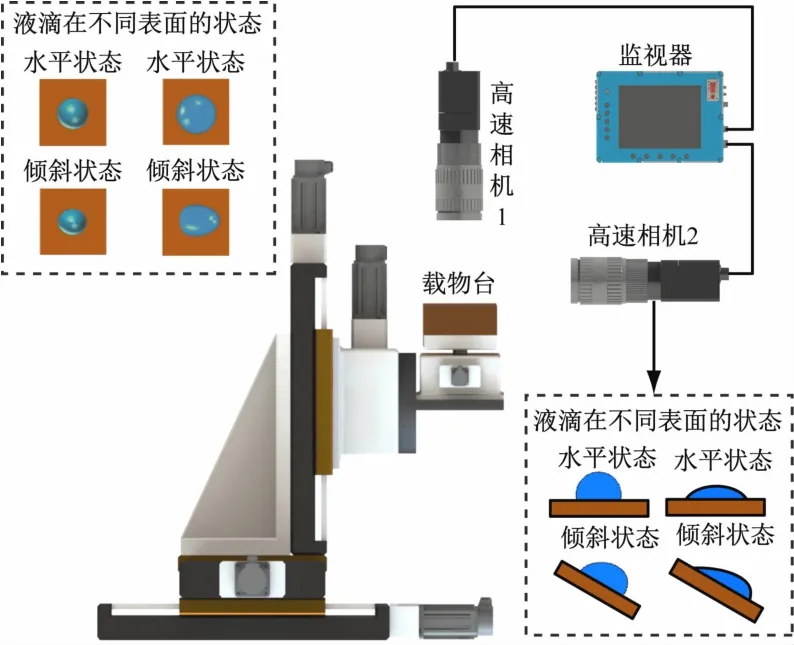
图5 固液界面润湿性测量模块
此外,检测液滴接触角≤90°时,俯视的高速相机1 能清晰拍摄液滴的轮廓线,结合旋转平台和高速相机2,再借助图像处理软件拟合检测液滴的三相接触线,如图6 所示。
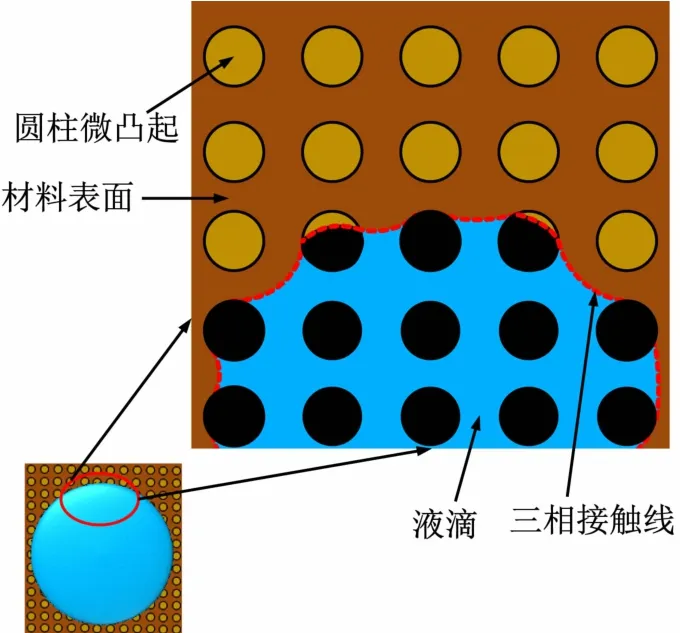
图6 三相接触线示意图
1.2 实验系统特性
本文设计的实验系统主要特性:温控箱温控范围为0~120 ℃,±0.1 ℃;X、Y、Z三轴移动的行程为100 mm,重复定位精度为1 μm,定位精度为3 μm;平台倾斜的范围为-90°~90°,±0.1°;旋转平台的旋转范围为360°,±0.1°。
2 实验系统的机械结构
2.1 X、Y、Z三轴移动平台
图7 所示为实验系统的三轴移动平台装配组成,主要由X、Y、Z3 个方向的伺服电动机1~3、底座1~3、载板1~3、高精度滚珠丝杠1~3、高精密线性滑块导轨1~3 组成。由图可知,底座1 固定在水平面,上方的导轨1 与接载板1 连接,载板1 在导轨方向上的最大位移处有限位挡板,伺服电动机1 固定在底座1上,底座1 内部水平放置的高精密滚珠丝杠通过联轴器与伺服电动机轴相连。底座2 固定在载板1 的上方,上方与高精密线性滑轨2 连接,伺服电动机2 与底座2 内的滚珠丝杠2 相连。底座3 竖直固定在载板2上,内部和上方分为有滚珠丝杠3 和高精密线性滑轨3,伺服电动机3 与滚珠丝杠3 相连。实现X、Y、Z3 个方向的精确定位和移动。
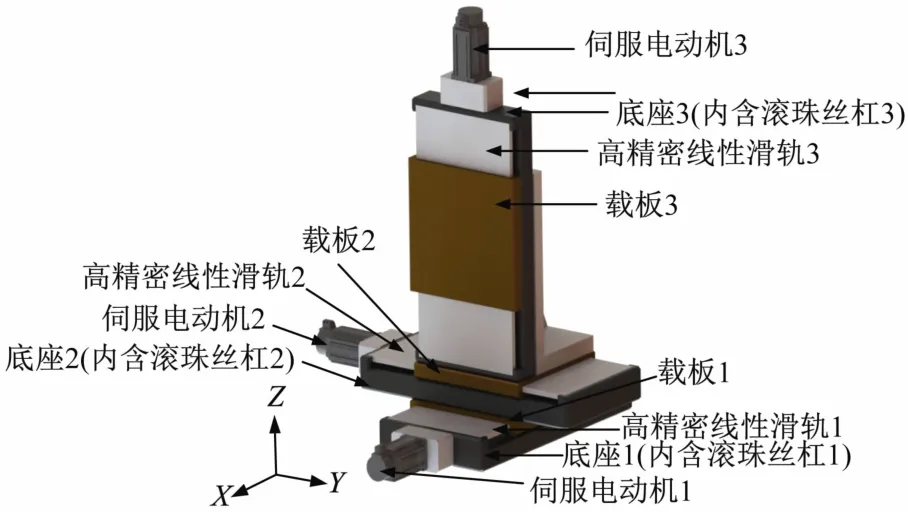
图7 X、Y、Z三轴移动平台装配组成
2.2 倾角平台结构
倾斜平台的结构由伺服电动机4、电动机座以及倾斜平台组成,如图8 所示。由图可知,电动机座固定在Z轴移动平台的载板3 上,电动机座上有旋转平台,旋转范围-90°~90°。伺服电动机4 安装在电动机座上,电动机轴通过联轴器与蜗杆相连,驱动蜗轮蜗杆机构带动电动机座上的平台旋转,达到设定的倾斜角度位置。电动机座表面上刻有分度线,可实时读取倾斜平台的倾斜角度。

图8 倾斜平台结构
2.3 旋转平台结构
旋转平台主要由电动机座、伺服电动机5、载物台以及温控箱组成,如图9 所示。由图可知,电动机座固定在倾斜平台上,伺服电动机5 安装在电动机座上,电动机轴与蜗杆相连,通过蜗轮蜗杆机构带动上方平台实现360°旋转。平台上有温控箱,载物台在温控箱上方,内含传热板。

图9 旋转平台结构
3 实验系统的电气模块
3.1 电气模块
本文设计的多功能高精密润湿性测量实验系统,对应控制模块需根据实验所需的X、Y、Z坐标、温度、转角以及倾角等因素进行设计。控制模块的硬件部分由人机界面、S7-200 系列PLC、模拟量和数字量I/O模块、伺服驱动器、伺服电动机及温度控制器组成。在PC机上用STEP 7-Micro /WIN 软件进行控制的设计及用梯形图的方式进行PLC 编程。伺服驱动器选用ASDA-A2 系列,PLC 向伺服驱动器发送脉冲信号,根据信号对伺服电动机的控制,实现X、Y、Z3 个方向的准确移动和精确定位,平台的倾斜角度和旋转平台的转角。PLC 通过模拟量I/O 模块实时采集传热板温度;经过A/D 转换和模糊PID 运算,通过数字量I/O模块对加热器的功率进行控制,实现温控箱的恒温控制。
图10 所示为伺服驱动器与伺服电动机的驱动和控制原理图。由图10 可知,该控制模块由强电回路和弱电回路组成。强电回路由伺服驱动器RST 3 个端子接入220 V的三相交流电。弱电回路的L1c和L2c端子作为主电源电路输入回路与单相交流电源连接。编码器的A、B、C信号以差动的方式输出,反馈伺服电动机的行程,与PLC 发出的脉冲信号对比,形成1 个闭环系统。
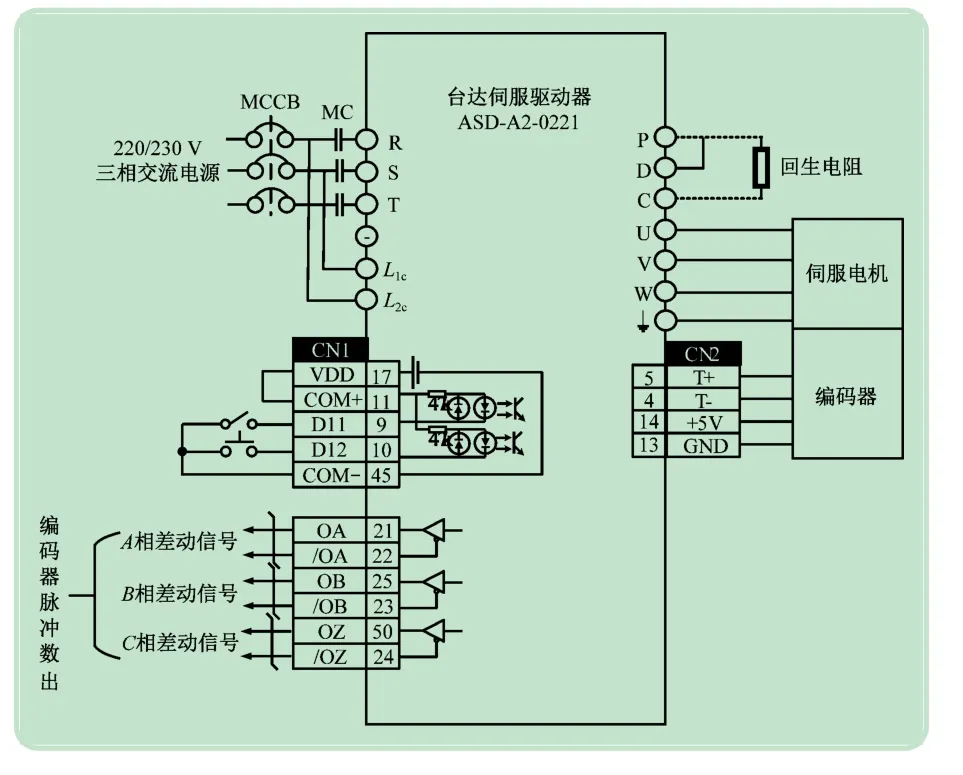
图10 伺服驱动器与伺服电动机的驱动和控制原理
根据实验系统对温控箱内传热板的温度设计要求,设计了图11 所示的温度控制回路。由输入、输出和温度模块EM231 组成。输入端的启动按钮、停止按钮以及保护开关由24 V 直流电源供电。输出端的运行、停止和报警指示灯判断温控箱运行情况。温度模块中的PT100 温度传感器检测加热板的温度,并将温度信号转化为对应的电信号,PLC 进行温度调节。在加热状态时,继电器接通,加热板进行加热,无需加热时,继电器自动断开,加热板停止加热。

图11 温控箱的温度控制原理
3.2 PLC控制
在PC机中,使用STEP 7-Micro /WIN软件编写实现控制要求与功能的PLC 程序。该实验系统的自动控制流程如图12 所示。由图可知,该系统主要包括自动控制和参数设置2 个模块。
自动控制模块在实验系统准备运行阶段进行系统自检,检查无误后根据设定的X、Y、Z3 个方向上的坐标、传热板温度、平台倾角、转台转角自动运行,并实时反馈X、Y、Z3 个方向的坐标值、传热板温度、平台倾角,转台转角,与设定参数对比,进行误差补偿,达到设定状态。
参数设置模块主要对实验所需参数进行设置,当设置参数超过其量程时,自动报警。
3.3 人机界面
为更好地实现人机交互,根据实验系统自动控制流程图,设计了人机交互模块。如图13 所示的实验系统监控界面,人机界面设置包括了X、Y、Z3 个方向的坐标、倾角、转角以及温度值。在实验系统运行过程中,人机界面上实时显示参数和液滴画面。能及时保存实验系统的运行数据,对系统的精度和稳定性进行评判。人机界面还包括启动键、暂停键、复位键和运行、报警、以及停止指示灯,方便操作实验系统以及监控实验系统运行状态。

图13 实验系统监控界面
4 实验案例
最终搭建的测试系统结构紧凑,空间利用率高,功能较多,能支持基础型、多样化教学实验,以及进阶型、高阶型研究性实验。
(1)经典的机电伺服控制实验。实验根据X、Y、Z三轴方向精确定位以及倾斜平台精准角度的需求。
(2)PLC逻辑编程实验。实验可通过使用编程软件STEP 7-Micro /WIN,编写试验台控制X、Y、Z三轴方向和转台倾斜角度的伺服电动机的启动与停止。
(3)PID温度控制实验。实验针对传统PID控制方法,对比采用模糊PID控制理论及自适应算法,建立本实验台加热控制的模糊准则及相关系统误差,进行参数调整。
(4)构件表面润湿参数测量实验。实验通过不同材料构件表面在相同高度下滴入固定容量的液滴,测试液滴在固液界面上的接触角、滚动角和三相接触线。结合高速显微相机拍摄的影像资料,理解分析润湿表征参数的内涵与实质。
(5)构件表面微结构对润湿性参数的影响观测实验。实验通过对比表面具有不同几何形态(圆形、三角形、矩形等)和分布形式(均匀、非均匀)的相同微结构材料的测试件在相同高度下滴入确定容量的液滴过程中,观察液滴润湿演变过程的不同。结合高速显微相机拍摄的影像资料,测试表面微结构改变界面自由能,可以改变润湿性。
(6)温度对微结构表面润湿性参数的影响观测实验。实验通过对比相同材料且具有相同微结构的测试表面,观察构件在不同温度情况下滴入相同容量液滴,界面润湿性的变化规律。
5 结 语
本文设计了一款可针对温度、角度、微结构多因素改变下的构件表面润湿性检测实验系统,与普通实验设备相比,结构紧凑、功能多样、操作方便,能完成多个不同层次需求的教学实验和研究测试:①本实验系统能开展经典机电伺服传动控制、PLC 编程设计、模糊PID温度控制等实验;②该试验系统能开展改变检测件倾斜角度、液滴工质及容量等影响因素下构件表面润湿性能改变规律的研究性测试;③该测试系统能实现多种微结构表面形态、材质和液滴工质的静态、动态润湿性指标检测。可满足智能制造专业基础课程的实验教学、研究提高型实验训练、研究生项目研究的测试需求等。
本实验系统为智能制造专业实验室建设提供了有效、实用、先进的设备保障,具有较高的实验应用价值。
猜你喜欢
原子与分子物理学报(2021年1期)2021-03-29
高校化学工程学报(2020年2期)2020-06-10
原子能科学技术(2020年1期)2020-03-30
实用口腔医学杂志(2017年6期)2017-09-19
电镀与环保(2016年2期)2017-01-20
西南石油大学学报(自然科学版)(2016年6期)2017-01-15
光学精密工程(2016年5期)2016-11-07
邢台学院学报(2016年4期)2016-02-28
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
河南科技(2013年10期)2013-08-12
