宽速域高超声速飞机进气道不起动一体化保护控制
2023-08-22 04:49李家鑫李旦伟吴国强吴志刚
宇航学报 2023年7期
李家鑫,李旦伟,刘 凯,吴国强,吴志刚
(1. 中山大学航空航天学院,深圳 518107;2. 沈阳飞机设计研究所,沈阳 110035;3. 大连理工大学航空航天学院,大连 116024)
0 引 言
宽速域高超声速飞机要求具备水平起降,长时间临近空间机动飞行,可重复使用的特征。因此通常采用在宽速域内大比冲的涡轮、冲压组合动力发动机方案[1-2]。宽速域高超声速飞机起飞加速过程经历涡扇单独工作、涡扇/冲压共同工作(以下称模态转换)和冲压单独工作三个不同工作状态,而且还需依据指令做爬升、转弯、俯冲等机动动作。飞行状态的变化和组合发动机内部的调整可能引起进气道内部流场急剧恶化,总压恢复系数和空气质量流率骤降,导致推力性能急剧下降和熄火,这种现象被称为进气道不起动。2007年美国DARPA与澳大利亚Queensland大学联合开展的高超声速飞行试验以及美国空军于2011开展的X51A第二次高超声速飞行试验中均出现进气道不起动现象,直接导致任务失败[3]。因此避免进气道不起动的相关研究有重要的工程意义。
近年来,一些学者从控制理论、实验、数值分析等角度对进气道不起动进行研究。文献[4-5]针对冲压发动机进气道不起动,先后提出了基于LQR-PI和径向基函数神经网络的模型参考自适应控制增强方法,能够在进气道不起动后更快地稳定高超声速飞行器的姿态,为进气道重新起动提供有利条件。文献[6-8]基于硬件在环仿真和实验/数值方法提出高超声速进气道不起动预测策略。文献[9]应用CFD对双模态冲压发动机进行计算,提出进气道不起动的预测方法。在冲压发动机控制方面,文献[10]从进气道落压比的角度定义了进气道不起动裕度。文献[11-12]在明确安全边界的基础上提出和丰富了基于多模式切换思想的进气道不起动监测和保护控制方法。文献[13-14]分别设计了带攻角约束的自适应反步控制器和固定时间鲁棒控制器,从而避免攻角过大引起进气道不起动。
以上可以看出,目前国内外学者关于进气道不起动的研究集中于进气道不起动机理、边界分析、冲压发动机多模式切换控制和考虑攻角约束的飞行控制等方面,但鲜有从飞行/推进一体化控制的角度对进气道不起动问题进行分析。鉴于宽速域高超声速飞机飞行/推进耦合效应显著[15],对飞行器姿态、发动机控制系统进行解耦设计显然无法取得最优效果。对此,本文针对一型装备双模态冲压发动机的高超声速飞行器进行建模、明确进气道不起动判定准则和安全裕度定义方法,提出飞行/推进一体化控制方法,避免飞机陷入进气道不起动的非正常状态。
1 宽速域高超声速飞机飞推一体化建模
1.1 双模态冲压发动机性能建模
双模态冲压发动机整体结构分为前体压缩段/进气道、隔离段/燃烧室、尾喷管,如图1所示。建立双模态冲压发动机推进系统模型需要计算流经发动机的空气质量和各部分气流参数,最后通过牛顿定律估算推力在前体压缩段/进气道部分,采用激波、膨胀波理论计算流场状态,计算每个波面后的气流参数,当波面相交会产生新的波系,当流场内波系足够复杂则转而计算当前x位置的平均气流状态,x位置到隔离段入口之间的气流参数根据有摩擦的管道流动公式进行计算。
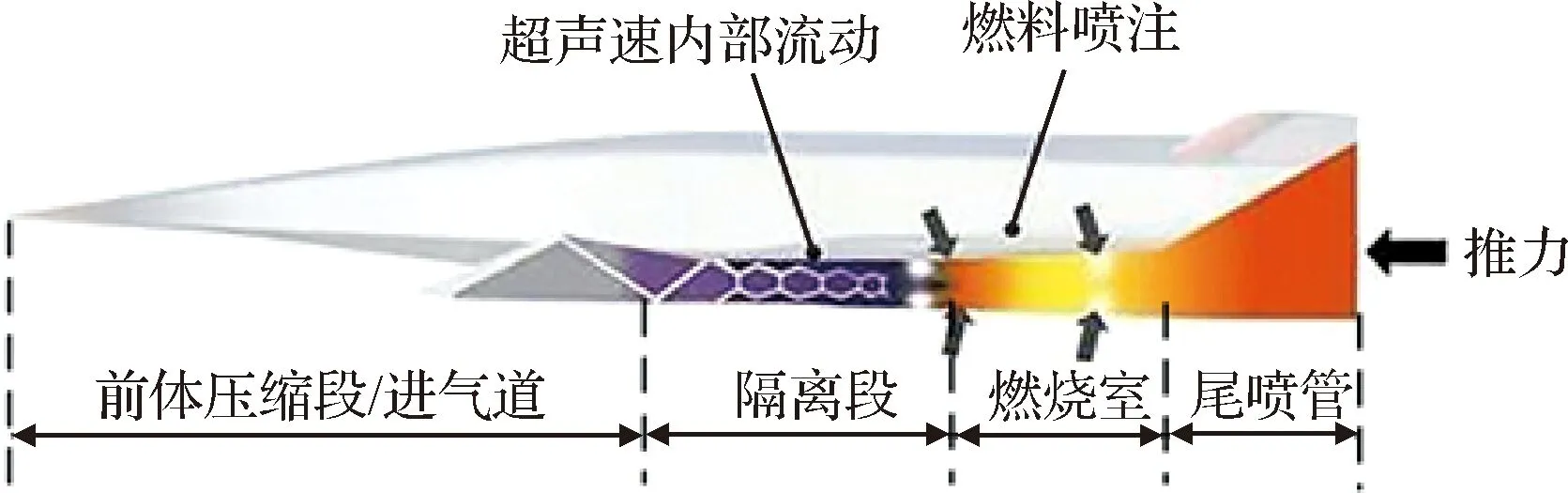
图1 双模态冲压发动机结构示意图
隔离段/燃烧室建模过程不考虑化学反映过程和气流与壁面之间的热传递,假设燃油在燃烧室入口位置垂直于飞行器体轴单点喷注。根据能量气流状态随声速与热力参数变化规律,得到如下关系[16]。
(1)
(2)
(3)
(4)

当燃烧室最小马赫数小于1时,燃烧室由超燃模态进入亚燃模态,此时式(1)~(3)奇异,须求解燃烧室内马赫数为1的位置,通过积分求得隔离段燃烧室的气流参数,音速点位置求解方法为
(5)
下标“*”表示临界音速点。得到(dVM/dx)的关系式如下:
(6)
(7)
其他气流参数可根据马赫数求得。当燃料注入量增加,燃烧室内压力上升过大,或来流条件恶化,进气道出口压力下降过大,燃烧室入口会产生边界层分离现象,隔离段为匹配高压燃烧室和低压进气道会形成激波串,当激波串长度大于隔离段长度时,进气道内出现正激波。激波串长度Ls的经验公式为
(8)
式中:Riso为隔离段高度或半径;VM3为隔离段入口马赫数;VM4为隔离段出口马赫数。定义进气道安全裕度ξ为
(9)
式中:Liso为隔离段长度。当ξ>0.1,进气道处于安全状态,当0.05<ξ<0.1,进气道处于预警状态,当0<ξ<0.05处于危险状态,当ξ≤0进入不起动状态。
在尾喷管部分,内喷管采用考虑摩擦的变截面积管道流动公式,在外体膨胀部分采用羽流建模思路得到气流参数随体轴的变化规律。
1.2 宽速域高超声速飞机动力学建模
在纵向飞行/推进一体化动力学建模方面,除传统姿态动力学和质点动力学建模方法外,加入对冲压发动机性能的描述,由于推力不易测量,将实际燃油当量比和进气道安全裕度作为状态量,用f1,f2代替复杂微分方程。
(10)
式中:Mz,Mth分别是气动俯仰力矩和推进系统产生的俯仰力矩;ωz是俯仰角速度;Jz是俯仰转动惯量;V是速度;θ是轨迹倾角;H为飞行高度;m为飞行器质量;ϑ为俯仰角;F,Y分别表示推力、升力;g表示重力加速度;α表示攻角;φ指燃油当量比,φc为燃油当量比指令。
根据小扰动线性化理论,将宽速域高超声速飞机纵向动力学模型展开:
(11)

(12)
(13)

2 宽速域高超声速飞机飞推一体化控制器设计
为了在宽速域高超声速飞机飞行/推进耦合效应的影响下快速追踪燃油当量比和攻角指令,同时兼顾进气道不起动保护,本文设计了考虑进气道不起动保护的飞行/推进一体化控制方案。当进气道处于安全状态时,通过调节燃油当量比和舵偏使飞行器追踪标称轨迹;当处于预警状态时,调节燃油当量比和燃烧室扩张比稳定进气道安全裕度;当处于危险状态时,同时调节燃烧室扩张比和舵偏,使飞行器攻角接近由进气道优化算法得到的最佳攻角,如图2所示。
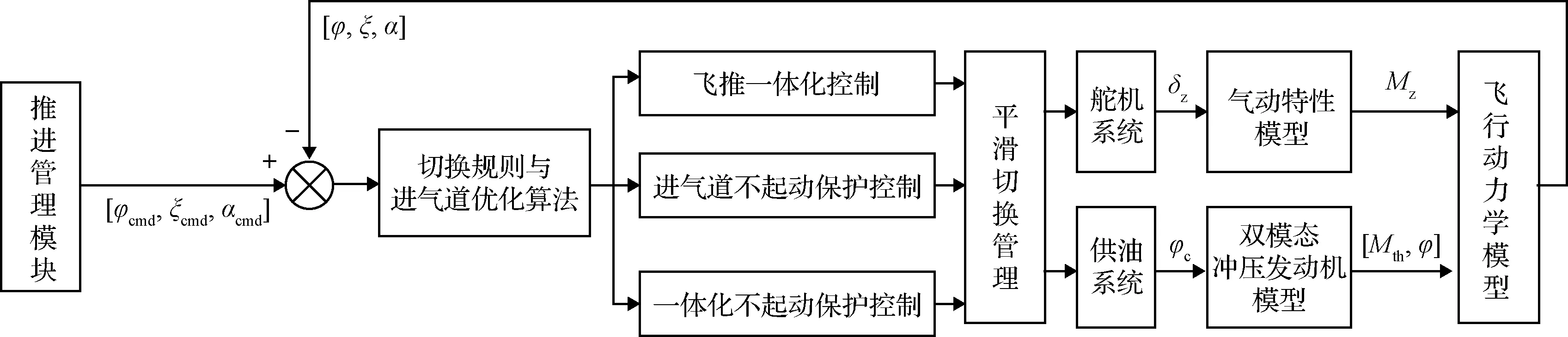
图2 飞行/推进一体化保护控制框图
2.1 飞推一体化控制设计
飞推一体化同时调节燃油当量比和舵偏,提取短周期小扰动运动方程状态量,式(11)可写为状态空间方程:
(14)
其中:
采用极点配置同时解算燃油当量比指令和舵偏,实现飞推一体化控制。首先对舵偏对应的三阶系统根据期望的动态性能指标选择主导极点:
(15)
(16)
式中:λ1,2表示两个主导极点;ξ为系统阻尼比;ωn为系统自然频率;ts为调节时间;σ为系统超调量。第三个非主导点位置可以选择5倍主导极点实部以上的值作为非主导极点,即:λ3=-nξωn,n为5或跟据实际响应效果选择。
燃油当量比对应的一阶系统期望极点位置记为λ4=-1/T,其中T为一阶系统时间常数,对应调节时间约为4T,可以通过理想的调节时间确定一阶系统的极点。确定所有极点后,控制器为
U=Uc-KΔX
(17)
在控制矩阵K解算方面,采用变换矩阵法。
(18)
式中:ai是A矩阵特征多项式的系数。耦合负反馈控制系统A-BK在选定目标极点上的特征方程为
(s-λ1)(s-λ2)(s-λ3)(s-λ4)=
s4+α1s3+α2s2+α3s+α4
(19)
控制矩阵为
(20)
2.2 一体化进气道不起动保护控制
传统的进气道不起动保护思路为通过调整进气道压缩面和燃烧室扩张比,在进气道不起动保护控制中设计反馈进气道安全裕度,调节燃烧室扩张比的形式实现进气道不起动控制。
由于费效比限制,实际工程中进气道通常采用根据飞行马赫数开环控制的调节方式,所以在容易出现进气道不起动的机动任务过程中,无法通过调节进气道构型的方式增大安全裕度。本文在最优进气模型[17]的基础上求解当前马赫数和进气道构型下的最佳进气攻角,当飞机靠近最佳进气攻角时,进气道流场得到改善,总压恢复系数提高,以此基础设计一体化不起动保护控制器。
本文以典型三阶压缩进气道为例,理想情况下流场内存在5个斜激波面,如图3所示,气流转折角满足:
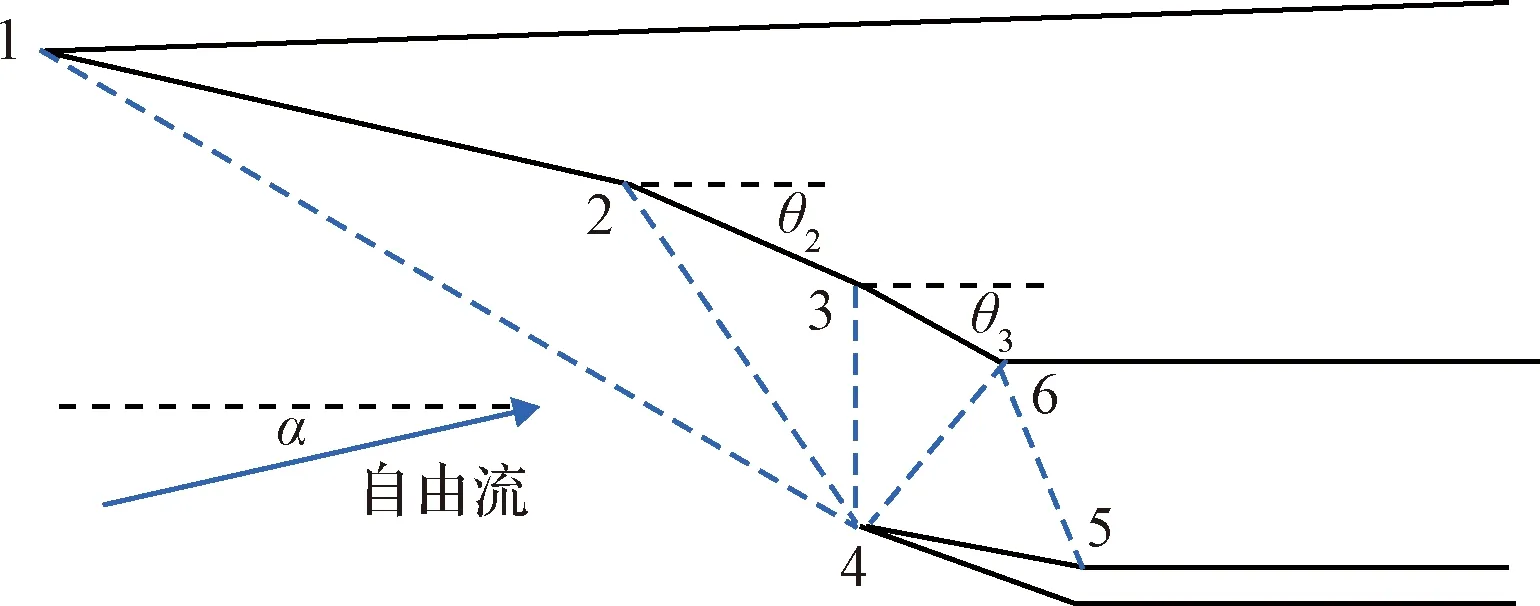
图3 冲压发动机进气道波系
α=δ4+δ5-(δ1+δ2+δ3)
(21)
根据斜激波关系,波面前后静压比为
(22)
进气道总压恢复系数为
(23)
(24)
(25)
由于进气道内气流只平行于壁面流动,在压缩角不变情况下,气流转折角δ2,δ3,δ4,δ5已经确定,第一个气流转折角δ1受攻角影响:
δ1=α+θ1
(26)
式中:θ1为进气道一阶压缩角。根据激波波前与波后的气体质量守恒、激波面方向上的气体动量守恒和几何关系和压强关系:
(27)
(28)
可知,求总压恢复系数最大等价于求一阶斜激波前后压比最大。定义函数
(29)
由函数单调性可知,此时问题转换为求解G的最大值。气流满足Rankine-Hugoniot方程约束;进气道压缩比约束;构造如下优化问题:
(30)
式中:PR为进气道压缩比。构造Lagrange函数如下:
F=G+λ0Ψ1=(γclnf0+lng0)+λ0(x1-
x0f0g0)+λ1(g0+lnPR)
(31)
将Lagrange函数分别对x1,y0,λ0,λ1求偏导数,通过解偏微分方程可得到最佳气流转折角,从而解算攻角。
一体化不起动保护控制同时调节舵偏和燃烧室扩张比,从而追踪攻角和进气道安全裕度,提取相关状态量,式(10)可写为状态空间方程:
(32)
其中,
根据上节极点配置算法可以得到控制量δz和τ的值。
3 纵向通道飞推一体化不起动保护控制仿真分析
基于前文所建立双模态冲压发动机动力学模型,对宽速域高超声速飞机一体化进气道不起动保护控制律进行仿真验证和分析。宽速域高超声速飞机机身参数和仿真初始条件参数见表1。
表1 机身参数与仿真初始条件
爬升阶段设置初始飞行马赫数6,初始攻角0°,弹道倾角0°初始高度19 000 m。燃油当量比为0.85。为验证所提一体化不起动保护控制的鲁棒性,设计从190~220 s时段和380~410 s分别进行变攻角的爬升机动,并加入俯仰力矩系数的±20%拉偏,得到如下图所示的纵向通道仿真结果,分别为攻角、燃油当量比、速度、推力、进气道稳定裕度、燃烧室扩张比响应曲线。
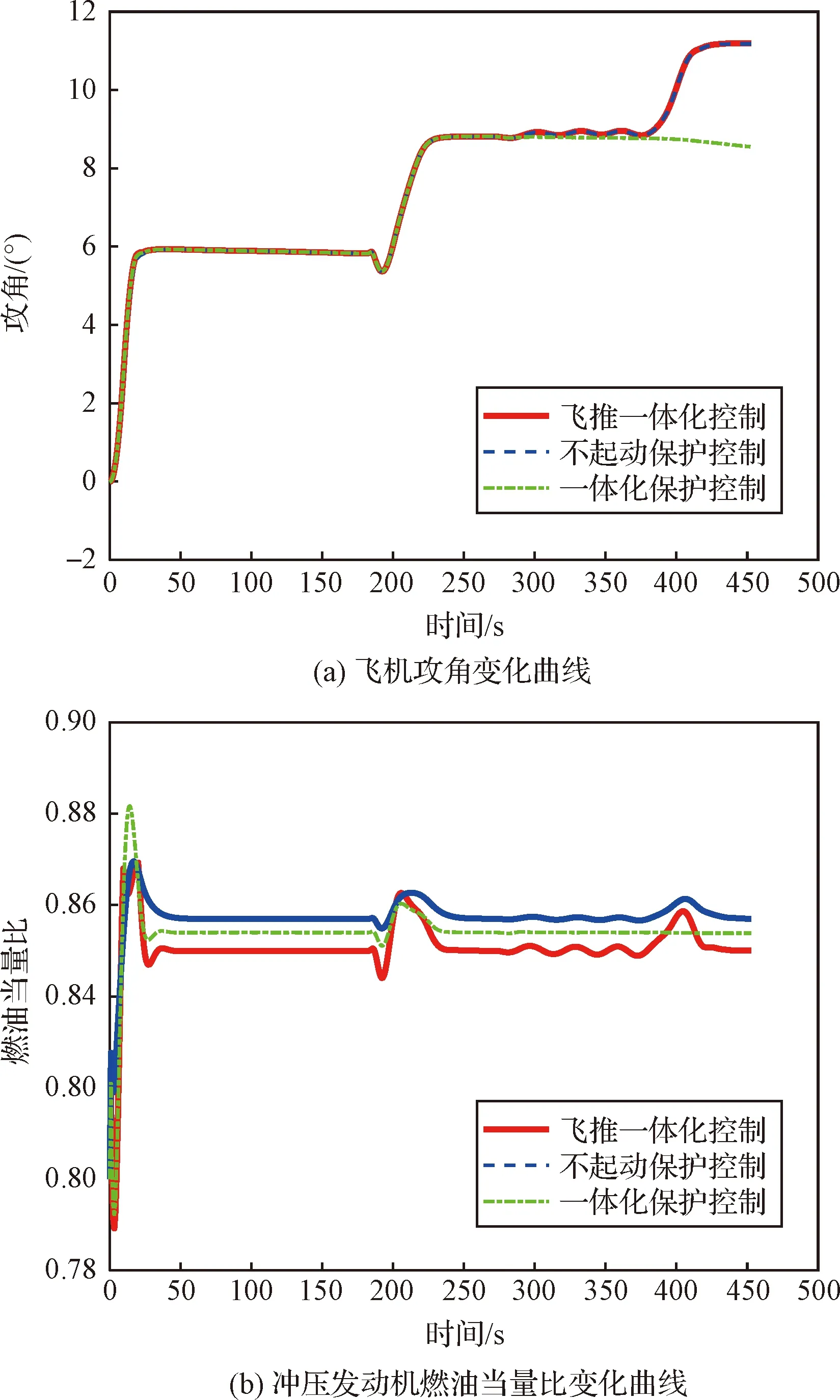
图4 攻角与燃油当量比响应曲线
由仿真结果可知,在飞行状态和燃油当量比下相同的情况下,进气道不起动稳定裕度和冲压发动机性能呈负相关关系。在飞行/推进一体化的控制结构下,攻角同过改变进气道流场,进而对实际燃油当量比有显著的影响。不考虑进气道不起动保护的控制方案在大攻角爬升过程中极易出现进气道不起动现象,此时稳定裕度和发动机推力均为0,速度损失显著;传统通过调整燃烧室扩张比实现进气道不起动保护控制方案在190~220 s范围内攻角较小情况下能够避免进气道不起动,在380~410 s范围攻角步增大时出现进气道不起动现象;一体化进气道不起动保护控制策略同时调节攻角和燃烧室扩张比,避免了进气道不起动和速度损失。如图4-6所示。

图5 速度与推力响应曲线
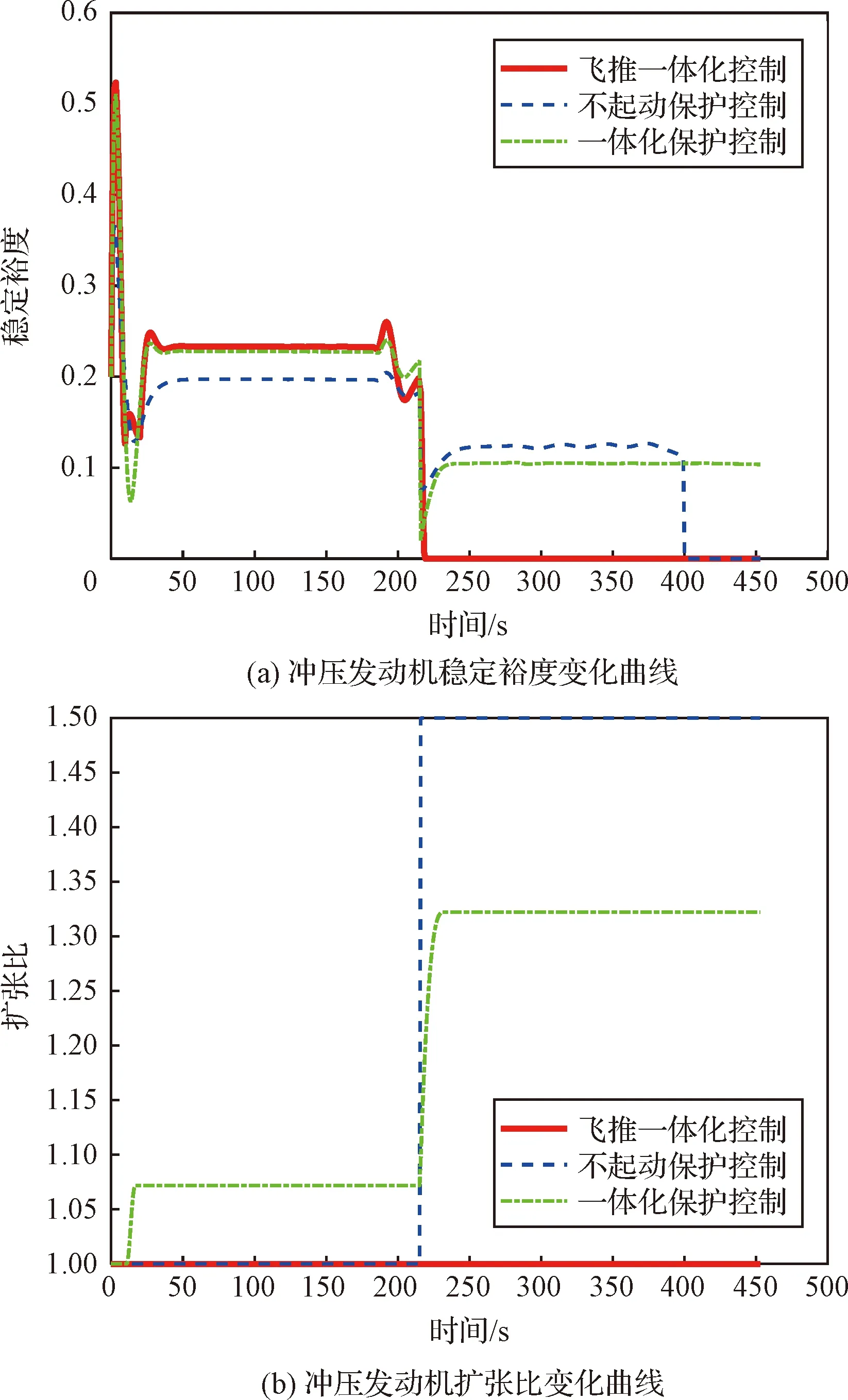
图6 进气道不起动裕度和燃烧室扩张比曲线
4 结 论
对于宽速域高超声速飞机大攻角机动过程中容易出现的进气道不起动问题,本文考虑了攻角对进气道流场的影响,设计了飞行/推进一体化进气道不起动保护控制方法,设计了攻角和燃烧室扩张比联合调节的一体化进气道不起动保护控制器,可有效提升宽速域机动任务过程中的进气道不起动稳定裕度,文中给出的对比仿真说明了该方法的有效性和优势。
猜你喜欢
装备制造技术(2021年2期)2021-07-21
北京航空航天大学学报(2020年3期)2021-01-14
宇航总体技术(2019年5期)2019-10-11
北京航空航天大学学报(2017年7期)2017-11-24
电测与仪表(2016年2期)2016-04-12
核科学与工程(2015年2期)2015-09-26
振动与冲击(2015年2期)2015-05-16
固体火箭技术(2015年6期)2015-04-24
空气动力学学报(2015年3期)2015-04-14
电测与仪表(2015年5期)2015-04-09